《摄影测量学》武大精品课程_A摄影测量基础
武汉大学摄影测量课件
py Ly
100%
55
3
、
S a f P 视摄影像片水平、 地面取平均高程 时,像片上的线 段 l 与地面上相 应的水平距L 之 比为摄影比例尺
摄 影 比 例 尺
A
H
1 l f m L H
E
f为摄影机主距,H为航高
56
什么是航高?与摄影比例尺的关系?
航高:摄影机相对某一水准面的 高度。
1 f (理想情况) 相对航高:摄影机相对某一基准 m H 面的高度。(通常基准面取测区 m H 地表平均高程平面,有 ) m H H mf m 绝对航高:摄影机相对平均海水 要求 5% m 面的高度。 即 H 5% H
4
第二章 摄影的基本知识与影像误差处理
§2-1 摄影原理与摄影机
等效透镜的基本点、线、面
5
第二章 摄影的基本知识与影像误差处理
§2-1 摄影原理与摄影机
主光轴: 透镜组诸透镜球面曲率的中心连线。 主焦点(F,F’): 平行于主光轴的光线通过透镜组后 与主光轴的交点。 主平面(Q,Q’): 过等效折射点(h,h’)且垂直于主光 轴的平面。 主点(s,s’): 主平面与主光轴的交点。 主焦距: 主焦点到主点间距离。 节点(k,k’): 主光轴上角的放大率为1的一对光学 共轭点。(光线通过共轭节点时,角 放大率为1;物方与像方同介质时, k,k’分别与s,s’重合)。
小比例尺
第二章 摄影的基本知识与影像误差处理
§2-4 航空摄影及其基本要求
三、航空摄影的基本要求
1、航摄倾角:摄影主光轴与 铅垂方向的夹角
要求 3
0
50
摄影瞬间摄影机的主光轴近似与地面垂直, 偏离铅垂线的夹角小于30,夹角为像片倾角
第三章摄影测量基础知识
地面摄影测量坐标系
一、像平面上的坐标系
1.框标坐标系
边框标
原点:框标连线交点P x轴:航向框标连线方向
y轴:旁向框标连线方向 y
x
P
机械框标(或边框标)
角框标
原点:框标连线交点P x轴:框标连线在航向方向夹角的平分线
y轴:垂直于x轴的方向作为y轴
坐标轴的正方向都按右手定则确定。
2.像平面坐标系(o-xy)
考虑因素:成图比例尺、测图方法、成图精度、 经济性等因素,还得综合考虑航摄像片以后的使 用可能性。
测图比例尺
比例尺类型 航摄比例尺 测图比例尺
1:2000 ~1:3000
大比例尺 1:4000 ~1:6000 1:8000 ~1:12000 中比例尺 1:15000~1:20000 1:10000~1:35000 小比例尺 1:20000~1:30000 1:35000~1:55000
?
A
3.4 摄影测量常用的坐标系统
摄影测量几何处理的任务是根据像片上 像点的位置确定相应地面点的空间位置。 摄影测量中常用的坐标系有两大类: 像方坐标系:描述像点的位置 物方坐标系:描述地面点的位置
像平面坐标系
像方坐标系
像空间坐标系
摄 影 测 量 坐 标 系
物方空间坐标系
像空间辅助坐标系
地面测量坐标系
T
s y
o
地面测量坐标为国家统一坐 标系,平面坐标为高斯-克 吕格3度带或6度带投影 (1980西安坐标系),高程 为1985黄海高程系
x
a
Zt Xt A
A(Xt,Yt,Zt) Yt
•地面摄影测量坐标系
设立原因:摄影测量坐标系采用的是右手系,而地面 测量坐标系采用的是左手系,这给由摄影测量坐标到 地面测量坐标的转换带来了困难。为此,在摄影测量 坐标系与地面测量坐标系之间建立一种过渡性的坐标 系,称为地面摄影测量坐标系。 其坐标原点在测区内的其一地面点上,X轴与航线方向 大致一致,但为水平.Z铀铅垂,构成右手直角坐标系。
第3章__摄影测量基础知识(武汉大学)

第3章__摄影测量基础知识(武汉大学).txt和英俊的男人握握手,和深刻的男人谈谈心,和成功的男人多交流,和普通的男人过日子。
本文由linhuixznu贡献ppt文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
第三章摄影测量基础知识3.1 航空摄影 3.2 中心投影的基本知识 3.3 航摄像片上特殊的点、线、面 3.4 摄影测量常用的坐标系统 3.5 航摄像片上的内、外方位元素 3.6 像点的空间直角坐标变换 3.7 中心投影构像方程 3.8 航摄像片上的像点位移本章主要内容本章主要讲述摄影测量基础知识,重点掌握摄影测量生产对摄影资料的基本要求,摄影测量常用的坐标系统像方坐标系和物方坐标系,航摄像片的内、外方位元素;理解像点的空间直角坐标变换与中心投影构像方程;了解航摄像片上的像点位移。
3.1航空摄影航一、航空摄影前的准备1、确定摄区范围摄区太大时,要进行分区划2、航摄仪的选择平坦地区大比例尺测图非平坦地区综合法测图长焦距窄角摄计全能法测图中焦距常角或宽角综合法测图【planimetric photo】指的是航空摄影和普通测量相结合的测图方法,地物平面位置用航空摄影方法求得,地面高程或等高线用普通测量方法求得。
只用在平坦地区。
全能法测图【universal photo】指的是在航空摄影测量作业中,用同一种仪器对地物、地貌测绘成地形图的方法。
3、摄影比例尺的确定摄影比例尺(又称像片比例尺)定义:航摄像片上一线段为l 的影像与地面上相应线段的水平距离L之比。
航摄像片上影像线段的长 1 l 严格定义: = 地面上对应线段的水平距离 m L 摄影比例尺是像片的平均比例尺1 f = m Hf:摄影机主距 H:摄影航高,以摄区内的平均高程面作为摄影基准面,摄影机的物镜中心至该面的距离4、摄影航高的确定航高:航摄飞机在摄影瞬间相对与地面的高度。
航高:航摄飞机在摄影瞬间相对与地面的高度。
摄影测量课件-摄影测量基础知识
攝影比例尺定義:
嚴格定義: 1 l
mL
航攝像片上影像線段的長 地面上對應線段的水準距離
攝影比例尺是像片的平均比例尺
f
:
攝影機主距
1 m
f H
H:攝影航高,以攝區內的平均高程面作為攝影基
準面,攝影機的物鏡中心至該面的距離。(攝影瞬
間攝影機物鏡中心相對於平均海水面的航高稱為絕
對航高。相對於其他某一基準面或某一點的高度均
航空攝影的過程中,我們所關心的區域往 往是要大於一幅影像所覆蓋的區域,這時 候
想想:攝影基線和像片的重疊度有什麼關係?
如果同樣的像幅大小,採用大比例尺和採 用小比例尺攝影基線長度一樣嗎?
攝影基線B 攝站點 航空攝影略圖
攝影方式
❖ 豎直航空攝影:航攝儀在曝
光瞬間物鏡主光軸與地面垂
直,通常規定像片傾角小於
一般情況下,要求航向重疊度最好為60%-65%,最小不 能少於53%;旁向重疊要求30%-40%,最小不少於15%。
思考:如果像幅是23cm*23cm,攝影比例尺是 1:10000,那麼這個像幅所覆蓋的實地面積是多大?
如果是1:50000的比例尺,面積又是多少?
23cm*10000* 23cm*10000=2.3km*2.3km 影:以飛機作為主要工作平
臺,把航攝儀安裝在航攝飛機上,
從空中一定角度對地面物體進行攝
影,飛行航線一般為西東方向,航
攝機在攝影曝光的瞬間物鏡主光軸
保持垂直地面。
而在攝影測量學中我們講的航空攝 影是主要是我們高精度的測繪地形 圖或者是進行4D產品的生產所進行 的空中攝影稱為航空攝影。我們研 究的範圍比較窄一些,而且主要指 的是針對地面進行攝影。
三、攝影測量生產對攝影資料的基本要求
5 摄影测量解析基础——【摄影测量学 武汉大学】
a25
y
f
cos
y f
(x sin
y cos )
a26
y
x
在竖直摄影的情况下,角元素都很小(<3度),各 系数可简化为:
0 sin 0 cos 1
a1 cos cos sin sin sin 1 a3 sin cos 0
Z ZS H
a11
x X s
1 Z
(a1 f
f (x)
f (x0 )
f (x0 )(x x0 )
f
(x0 2!
)
(
x
x0
)2
...
f
(
n) (x0 n!
)
(
x
x0
)n
Rn (x
Rn (x)
f (n1) ( )
(n 1)!
(
x
x0
)n1
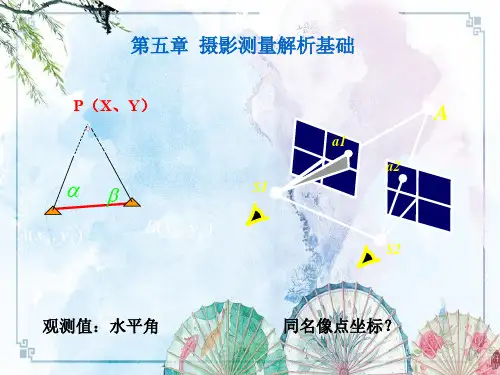
观测值:像点坐标
x
vx
(x)
x X s
dX s
x Ys
dYs
x Zs
dZs
x
d
x
d
x
d
y
vy
0
0
Y
Ys
a2
b2
c2
0
0 1 X X s
0
0
Y
Ys
1 0 0 Z Zs a3 b3 c3 1 0 0 Z Zs
a1 b1 c1 0
a2
b2
c2
0
0 0
1 a1
0
b1
a2 b2
a3 b3
X Y
a3
b3
c3 1
0
0 c1
c2
c3
摄影测量学基础知识点
摄影测量学基础知识点一、摄影测量学的基本概念。
1. 摄影测量学定义。
- 摄影测量学是对研究的对象进行摄影,根据所获得的构像信息,从几何方面和物理方面加以分析研究,从而对所摄对象的本质提供各种资料的一门学科。
简单来说,就是利用摄影像片来测定物体的形状、大小和空间位置的学科。
2. 摄影测量的分类。
- 按距离远近分。
- 航天摄影测量:利用航天器(卫星、航天飞机等)上的摄影机对地球表面进行摄影,获取大面积的影像数据,主要用于地形测绘、资源调查、环境监测等全球性或大区域的项目。
- 航空摄影测量:通过飞机等航空飞行器上的航空摄影机对地面进行摄影,是地形测绘、城市规划等中常用的测量手段,它可以获取较高分辨率的影像,覆盖范围相对航天摄影测量小,但精度较高。
- 地面摄影测量:将摄影机安置在地面上,对目标物进行摄影测量。
常用于近景摄影测量,如建筑变形监测、文物保护中的三维建模等。
- 按用途分。
- 地形摄影测量:主要目的是测绘地形图,获取地面的地形地貌信息,包括等高线、地物位置等。
- 非地形摄影测量:用于测定物体的外形、大小和运动状态等,在工业制造(如汽车外形检测)、生物医学(如人体骨骼测量)等领域有广泛应用。
3. 摄影测量的发展历程。
- 早期的摄影测量主要基于模拟摄影测量仪器,如立体测图仪等。
通过光学机械的方法,将摄影像片进行模拟处理,实现地形测绘等功能。
- 随着计算机技术的发展,进入解析摄影测量阶段。
通过建立数学模型,利用计算机解算像片上像点的坐标,提高了测量的精度和效率。
- 现在,数字摄影测量成为主流。
它以数字影像为基础,利用计算机视觉、图像处理等技术,实现自动化、智能化的摄影测量处理,如数字高程模型(DEM)生成、正射影像图制作等。
二、摄影测量的基本原理。
1. 中心投影原理。
- 摄影测量中,摄影机的镜头相当于一个中心投影的投影中心。
地面上的点在像片上的成像过程是中心投影。
- 设地面点A,摄影中心S,像点a,在中心投影下,A点发出的光线通过镜头S 后,在像平面上成像为a点。
摄影测量学(武大)01袁修孝
–
生物医学
–
–
公安侦破
古文物、古建筑
–
建筑物变形监测
§1.2 摄影测量学的发展历程
准确恢复两张影像的位置关系 快速确定两张影像上的同名点 A
a1 a2 S1
S2
摄影测量学的起源
1839年,法国人达盖尔发明摄影术为摄影测量提供了基本手段
1851 年,法国陆军上校劳赛达提出交会摄影测量并测绘了万森城堡 图,标志着摄影测量的开始
北京城市景观(亚运村)
摄影测量:分类
按距离远近
航天摄影测量 航空摄影测量 地面摄影测量 近景摄影测量 显微摄影测量 地 形摄影测量 非地形摄影测量 模拟摄影测量 解析摄影测量 数字摄影测量
按 用
途
按处理手段
摄影测量与遥感:平台
遥感平台 航天飞机 无线电探空仪 超高度喷气机 中低高度飞机 飞艇 高度 240~350km 100m~100km 10000~12000m 500~8000m 500~3000m 目的、用途 不定期地球观测、空间实验 各种调查(气象等) 侦察、大范围调查 各种调查、航空摄影测量 空中侦察、各种调查 其它
DLG
DRG
DOM
P31摄影经纬仪近景影像
航空光学影像
ADS40数字航空影像
摄影测量学:定义
各种类型 传感器 被摄物体 影 像
通过量测和 解译过程
自然物体及其环境的可靠信息
DEM
DLG
DRG
DOM
正射影像图
三峡正射影象图:三条航带 、175张航空影像
三维景观图
三峡景观图:三条航带 、175张航空影像
Archive system
Visualization Image analysis
摄影测量基础知识
解析摄影测量
以电子计算机为主要手段,通过对摄影像片的量测和解析计算方法的交会方式来研究和确定被摄物体的形状、 大小、位置、性质及其相互关系,并提供各种摄影测量产品的一门科学
摄
影
测
量
学
光 学像 片
解 析测图仪器
第
一
章
—
绪 论
•解析空三 •解析测图仪 •数控正射仪
吕 利 萍
数字线划地图 数字高程模型 像片影像地图
光学机械测图仪器
一
章
—
绪 论
•单片测图
•分工法测图
•综合法测图
吕 利 萍
图解线划地图 像片影像地图
人工建立立体模型
人工量测 和解译
机械绘图
Wild A10 模拟立体测图仪
摄 影 测 量 学 第 一 章 绪 论
吕 利 萍
—
—
光学纠正仪
摄 影 测 量 学 第 一 章 绪 论
SEG-1
吕 利 萍
HJ-24
(5)摄影测量:任务之一
▪
地形测量领域
摄
各种比例尺的地形图、专题图、特种地图
影
正射影像地图、景观图
测
量
学
第
一
章
—
绪
建立各种数据库
论
提供地理信息系统和土地信息系统所需要的基础数据
吕 利 萍
(5)摄影测量:任务之二
▪ 非地形测量领域
– 生物医学
– 公安侦破
摄
– 古文物、古建筑
影
– 变形监测
测 量
– 军事侦察
10000~12000m
侦察、大范围调查
学
中低高度飞机
500~8000m
摄影测量学基础第2章 摄影测量基础知识(影像获取 2课时)
➢优点: ✓直接存储数字影像,缩短作业周期 ✓无底片变形问题 ✓价格低、易普及、方便灵活 ✓调焦范围大、任意方向摄影 ✓满足特殊需要:遥控、水下、高空
➢缺点: ✓光学畸变差大,图象质量较差 ✓无框标装置 ✓成像面积小:小比例尺成像
机载数码成像系统
激光扫描范围 图像像幅
§2.1.2 遥感影像获取
《摄影测量学基础》 第二章 — 摄影测量基础知识
主要内容 §2.1 影像获取 2.1.1 航空影像获取 2.1.2 遥感影像获取 §2.2 摄影的基本要求
§2.1.1 航空影像获取
摄影测量是对物体的影像进行量测与解译,因此首先要对 被研究的物体进行摄影,获取被摄物体的影像,为此需要对 摄影测量仪器以及摄影的基础知识有一个基本的了解。 航空摄影测量主要使用的是专用的航空摄影机,它是一种 专门设计的大像幅的摄影机,也称航摄仪。随着数字摄影 测量技术的发展,有时也使用普通数字相机。
多回波特性
1st (and only) return from
ground
1st return from tree top
2nd return from branches
3rd return from ground
光谱特性
单一波段 灰度图
不同方式显示lidar数据
按航带 按回波数 按高程 按强度
2. 法国SPOT卫星
三 种
宽
扫 描
扫 描
方 式
三
台
扫
描
同轨立体成像
仪
SPOT5 全 色 波 段 图 像
(2.5米)
全色5m,多波段10米
常用的遥感卫星
3.美国IKONOS卫星
美国IKONOSⅡ卫星
《摄影测量基础知识》课件
摄影测量基本原理包括相对定 向、绝对定向、影像立体模型 构建、影像测量及精度分析。
摄影测量的数据获取
摄影测量的设备 摄影测量的数据处理流程
摄影测量中的摄影参数
航空及卫星遥感影像、数字相机、扫描影像仪等。
包括相对定向、绝对定向、立体模型构建、三维 测量以及误差分析和精度评价。
包括焦距、主距、透镜畸变、像点坐标等。
摄影测量的数据处理
数据处理方法
数字摄影测量使用计算机对影像 进行处理,包括同名点测量、影 像匹配、立体三角测量、DEM生 成等。
错误分析和精度评价
摄影测量中的误差来源包括影像 畸变、摄影量测误差和DEM精度 误差等,需要进行错误分析和精 度评价。
摄影测量的应用
摄影测量在地图制图、建筑设计、 环境监测、城市规划等领域上都 有广泛的应用。
摄影测量基础知识
本PPT课件将介绍摄影测量的基础知识,包括定义、基础原理、数据处理、应 用以及未来趋势和影响。
什么是摄影测量
1 定义
2 作用
摄影测量是一种基于摄影 的测量方法,用于从影像 中测量物体的坐标、形状、 大小和位置等特征。
摄影测量可用于制作高精 度地图、评估路网、监测 建筑物变形、计算土地利 用、测量水体面积等众多 领域。
3 应用
摄影测量广泛应用于地理 信息、测绘、城市规划、 环境监测、农业等领域。
摄影测量的基础知识
光学基础知识
摄影测量需要了解光学基础知 识,例如相机的光学结构、感 光几何基础知 识,例如坐标和距离的计算、 三角形成像原理、投影变换等。
摄影测量的基本原理
1
最新进展
数字化、智能化、自动化、精确化是摄
未来趋势
2
影测量技术的最新趋势,立体匹配和对 象提取等技术将得到更广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车载升降台
摄影测量:特点
无需接触物体本身获得被摄物体信息
由二维影象重建三维目标
面采集数据方式 同时提取物体的几何与物理特性
摄影测量:任务之一
地形测量领域
各种比例尺的地形图、专题图、 特种地图 正射影像地图、景观图 建立各种数据库 提供地理信息系统和土地信息系 统所需要的基础数据
摄影测量:任务之二
学时) 理论精度和实际精度的评定方法 单个备选假设下的可靠性理论、粗差检测方法(数 据探测法、 选权迭代法)
第八章 解析空中三角测量最新发展 (6学时)
摄影测量基础:参考资料
教材
张剑清,潘励,王树根 编著,《摄影测量学》,武汉大学出版社
参考书
1、李德仁 等编,《基础摄影测量学》,测绘出版社 2、李德仁 等编,《摄影测量与遥感概论》,测绘出版社 3、李德仁,郑肇葆 编著,《解析摄影测量学》,测绘出版社 4、袁修孝 著,《GPS辅助空中三角测量原理及应用》,测绘出版社
数字摄影测量
基于摄影测量的基本原理,通过对所获取的数字/数字化影像 进行处理,自动(半自动)提取被摄对象用数字方式表达的几 何与物理信息,从而获得各种形式的数字产品和目视化产品
数 字 影 像
•计算机技术 •数字图像处理 •影像匹配 •模式识别 •DPW
数字测量摄 影系统
自动建立 立体模型 自动量测 和解译
S
S
Z
航摄仪焦距:物镜节点到焦点的距离
像 片 主 距
像片主距:物镜后节点到像平面的距离
S f
F
长焦距:(主距>200mm) 中焦距:(主距=100~200mm) 短焦距:(主距<100mm)
像场:物镜焦面上中央成像清晰的范围
像 场 角
像场角:像场直径对物镜后节点的夹角
2
常 宽
角:(视场角<75 ) 角:(视场角=75 ~100 )
手工操作
模拟产品
像片
数字投影
解析测图仪
机助 作业员操作
模拟产品 数字产品
数字 摄影测量
数字化影像 数字影像
数字投影
计算机
自动化操作 +作业员干预
数字产品 模拟产品
§1.3 本课程的主要内容
讲授内容 与其他课程的关系
学习要求
摄影测量作业流程
Film based workflow RC30
Film Film processing in darkroom
B&W
DEM
Stereo plotter
Color
Orthophotos Mapping
FCIR B&W Color FCIR
Films used alternatively
DSW500 scanner
Revision GIS
Direct digital workflow ADS40
Mass Memory Ground processing
1858年,法国摄影师纳达尔乘坐气球在巴黎郊外 80m上空拍摄了世界 上第一张航空影像 1860年,美国人布莱克利用湿板拍摄了波士顿的航空像片 1885年,法国人乘坐气球从2000英尺高空拍摄了巴黎的航空像片 1903年,莱特兄弟发明了飞机使航空摄影和航空摄影测量成为可能
1906年,美国人劳伦仕用17只风筝吊着巨型相机拍摄了旧金山大火
影像处理
Where?
与量测 像点坐标量测及系统误差改正
第五章 立体像对解析 (6学时)
What Change?
网平差
共面条件方程、解析相对定向、空间前方交会 单元模型的绝对定向
第六章 经典解析空中三角测量 (10学时)
像片连接点设置、自由航带网的建立、光束法区域
成果表达
第七章 解析空中三角测量的精度与可靠性分析 (6
影像中的 几何信息 x y
模型重建
地物几何位置 X Y Z
几何量测
共线条件
z
y S(Xs, Ys, Zs)
Z a (x,y) x
x X X S y R Y Y S z Z ZS
Y
A(X,Y,Z) X
单像摄影测量:理论基础
x y 已知量
共线方程
X Y Z 未知量
共面条件
z1 z2
y1
S1 Z x1 a1(x1,y1) y2 S2 a2(x2,y2)
x2
Y
A(X,Y,Z) X
立体摄影测量:目的
x1 y1 x2 y2 已知量
X Y Z 未知量
摄影测量基础:讲授内容
第一章 绪论
(2学时) 摄影测量学的定义、任务和发展过程
DLG
DRG
DOM
P31摄影经纬仪近景影像
航空光学影像
ADS40数字航空影像
摄影测量学:定义
各种类型 传感器 被摄物体 影 像
通过量测和 解译过程
自然物体及其环境的可靠信息
DEM
DLG
DRG
DOM
正射影像图
三峡正射影象图:三条航带 、175张航空影像
三维景观图
三峡景观图:三条航带 、175张航空影像
影像获取
点坐标变换
第二章 投影几何基础知识 (6学时)
投影的分类与透视变换、透视变换成图
第三章 单张像片解析 (20学时)
像片的内外方位元素、像点位移、常用坐标系、像 旋转矩阵、空间坐标变换、共线条件方程、单片空 间后方交会
What?
第四章 立体观察与立体量测 (6学时)
人体的立体视觉、人造立体视觉、像对的立体观察
自动记录
德国Zeiss厂C-100型解析测图仪
瑞士Kern厂DSR-1型解析测图仪
瑞士WILD厂OR-1型数控正射投影仪
德国Zeiss厂Z-2型数控正射投影仪
坐标量测仪
数字摄影测量
计算机硬、软件技术的飞速发展,使功能增
强,成本降低,并为编制大型软件提供平台
20世纪70年代:数字摄影测量萌芽阶段 20世纪80年代:数字摄影测量原型研究阶段 20 世纪 90 年代:真正推出可用于生产的数字 摄影测量系统
《摄影测量学》(上)第一章
绪 论
武汉大学
遥感信息工程学院 摄影测量教研室
主要内容
一、摄影测量学的定义与任务
二、摄影测量学的发展历程 三、本课程的主要内容
§1.1 摄影测量学的定义与任务
定义 分类 平台 特点 任务
A(X、Y、Z)
Z
Y
1
2
2 X
Hale Waihona Puke O1通过摄影,进行测量
遥感影像
非地形测量领域
–
生物医学
–
–
公安侦破
古文物、古建筑
–
–
变形监测
军事侦察
–
矿山工程
§1.2 摄影测量学的发展历程
准确恢复两张影像的位置关系 快速确定两张影像上的同名点 A
a1 a2 S1
S2
摄影测量学的起源
1839年,阿拉戈发明摄影术为摄影测量提供了基本手段
1851 年,法国陆军上校劳赛达提出交会摄影测量并测绘了万森城堡 图,标志着摄影测量的开始
5、李德仁,袁修孝 著,《误差处理与可靠性理论》,武汉大学出版社
课程网站
http://221.232.129.83/jpkc2005/syclx/index.htm
摄影测量基础:与其他课程关系
先修课程
1、测量平差原理 2、测量学 3、高等数学 4、线性代数 5、航空和航天摄影技术
作业: PP.11,第1、2题
Archive system
Visualization Image analysis
Digital workstation
Classification
B&W Color MS
All spectral channels simultaneously Printer
摄影测量:基本关系式
表达像点与地面点之间关系
第一次世界大战期间,首台航摄仪的问世、立体坐标量测仪和 1318 立体测图仪的使用,真正开始了摄影测量学
摄影测量学的三个发展阶段
模拟摄影测量(1851-1970)
解析摄影测量(1950-1980)
数字摄影测量(1970-现在)
模拟摄影测量
利用光学/机械投影方法实现摄影过程的反转,用两个/多个投 影器模拟摄影机摄影时的位臵和姿态构成与实际地形表面成比 例的几何模型,通过对该模型的量测得到地形图和各种专题图
数字线划地图 数字高程模型 数字影像地图 数 据 库
自动记录
VirtuoZo 数字摄影测量系统
Crystal eyes 3-D mouse
JX-4A数字摄影测量工作站
像素工厂
摄影测量三个发展阶段的特点
发展阶段
原始资料
投影方式
仪器
操作方式
产品
模拟 摄影测量 解析 摄影测量
像片
物理投影
模拟测图仪
北京城市景观(亚运村)
摄影测量:分类
按距离远近
航天摄影测量 航空摄影测量 地面摄影测量 近景摄影测量 显微摄影测量 地 形摄影测量 非地形摄影测量 模拟摄影测量 解析摄影测量 数字摄影测量
按 用
途
按处理手段
摄影测量与遥感:平台
遥感平台 航天飞机 无线电探空仪 超高度喷气机 中低高度飞机 飞艇 高度 240~350km 100m~100km 10000~12000m 500~8000m 500~3000m 目的、用途 不定期地球观测、空间实验 各种调查(气象等) 侦察、大范围调查 各种调查、航空摄影测量 空中侦察、各种调查 其它