变频调速系统设计可以分为两个重要部分
电气自动化控制中变频调速技术研究

电气自动化控制中变频调速技术研究目录1. 内容简述 (3)1.1 研究背景 (3)1.2 研究意义 (4)1.3 国内外研究现状 (5)1.4 本文研究内容与结构 (6)2. 变频调速技术基础 (7)2.1 变频器的基本原理 (8)2.2 变频器的分类与技术特点 (9)2.3 变频调速系统的组成 (10)2.4 变频调速技术的发展趋势 (12)3. 电气自动化控制系统的需求分析 (13)3.1 控制系统的作用与要求 (14)3.2 不同行业对变频调速的需求 (15)3.3 控制系统设计原则 (16)4. 变频调速技术在电气自动化控制中的应用 (17)4.1 变频调速在电动机控制中的应用 (18)4.2 变频调速在泵和风机系统中的应用 (19)4.3 变频调速在列车控制中的应用 (20)4.4 变频调速在其他电气自动化领域的应用 (22)5. 变频调速技术的研究进展 (23)5.1 变频器控制算法的研究 (24)5.2 变频器动态性能分析 (26)5.3 变频器的可靠性与故障诊断 (27)5.4 节能技术在变频调速中的应用 (29)6. 变频调速技术的仿真与实验 (30)6.1 仿真模型的建立与验证 (32)6.2 实验平台的建设与调试 (33)6.3 仿真结果分析 (35)6.4 实验结果讨论 (36)7. 变频调速技术在电气自动化控制中的挑战与对策 (37)7.1 设计难点与挑战 (38)7.2 提高控制精度的对策 (39)7.3 实现高效稳定的对策 (40)7.4 解决方案与策略 (41)8. 结论与展望 (43)8.1 研究总结 (44)8.2 未来研究方向 (45)8.3 实际应用前景 (46)1. 内容简述随着电力系统的不断发展,电气自动化控制技术在工业生产中的应用越来越广泛。
变频调速技术作为电气自动化控制领域的重要组成部分,具有高效、节能、可靠等优点,已经成为现代工业生产的关键技术之一。
变频调速的基本控制方式ppt课件

28
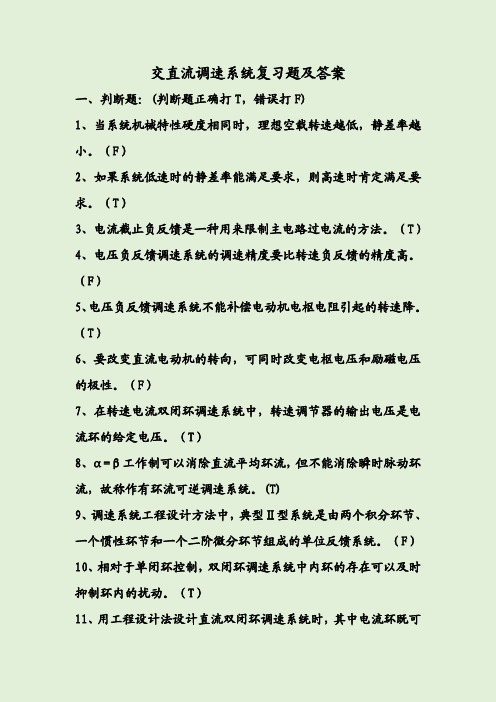
机械特性曲线
n
可见,当频率ω1提高 时,同步转速n1随之提 n1c 高,最大转矩减小,机 n1b
械特性上移;转速降落 n1a
1c 1b 1a
随频率的提高而增大, n1N 1N
1N <1a <1b <1c 恒功率调速
特性斜率稍变大,其它
形状基本相似。如右图
所示。
2024/7/16
O Te
图6-5 基频以上恒压变频调速的机械特性29
2024/7/16
22
结论
➢在恒压频比的条件下改变频率 1 时,机械特性基本上是
平行下移 ➢当转矩增大到最大值以后,转速再降低,特性就折回来 了。而且频率越低时最大转矩值越小
➢最大转矩 Temax 是随着的 1 降低而减小的。频率很
低时,Temax太小将限制电机的带载能力,采用定子压 降补偿,适当地提高电压Us,可以增强带载能力
(U漏—漏磁阻抗压降;Us—每相电压),
当Us很大时,U漏很小;可以认为Us≈Eg 。
m
US f1
C
要改变f1实现调速,则同时应改变Us来保持Φm不变。
—恒压频比控制方式
2024/7/16
12
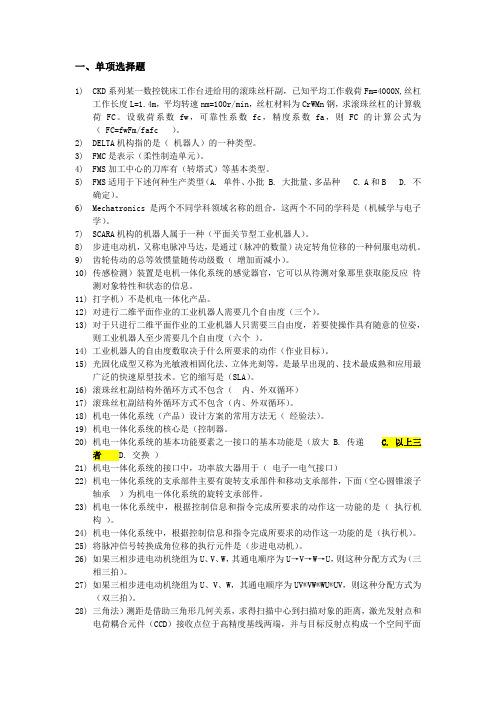
带定子压降补偿的恒压频比控制特性
但当f1太小时,忽略U漏则误差较大,这时可以人为增 大Us进行补偿,以减小误差。
2024/7/16
30
小结
电压Us与频率1是变频器—异步电动机调速系统的两个独立
的控制变量,在变频调速时需要对这两个控制变量进行协调 控制。 在基频以下,有两种协调控制方式。采用不同的协调控制方 式,得到的系统稳态性能不同。 在基频以上,采用保持电压不变的恒功率弱磁调速方法。
2024/7/16
《2024年基于PLC的变频调速电梯系统设计》范文

《基于PLC的变频调速电梯系统设计》篇一一、引言随着城市化进程的加快,电梯已经成为现代建筑中不可或缺的一部分。
为满足现代社会的需求,电梯系统需要具有高可靠性、高效率和灵活性。
本文旨在介绍一种基于PLC(可编程逻辑控制器)的变频调速电梯系统设计,该系统可有效提高电梯的运行效率、安全性和用户体验。
二、系统设计概述本电梯系统设计采用PLC作为核心控制器,通过变频调速技术实现电梯的精确控制。
系统主要由以下几个部分组成:PLC控制器、变频器、电机、编码器、传感器以及人机界面等。
三、硬件设计1. PLC控制器:选用高性能的PLC控制器,具有高可靠性、高速度和高精度的特点,可实现电梯的逻辑控制和运动控制。
2. 变频器:采用变频调速技术,根据电梯的运行需求,实时调整电机的运行速度,实现电梯的平稳启动和停止。
3. 电机:选用高效、低噪音的电梯专用电机,与变频器配合使用,实现电梯的精确控制。
4. 编码器:通过安装在电机上的编码器,实时监测电机的运行状态,为PLC控制器提供反馈信号。
5. 传感器:包括位置传感器、速度传感器等,用于实时监测电梯的运行状态,确保电梯的安全运行。
6. 人机界面:采用触摸屏或按钮等方式,实现用户与电梯系统的交互。
四、软件设计软件设计是本系统的关键部分,主要涉及PLC控制程序的编写和调试。
1. 逻辑控制程序:根据电梯的运行需求,编写逻辑控制程序,实现电梯的召唤、应答、启停、开门关门等基本功能。
2. 运动控制程序:采用PID(比例-积分-微分)控制算法,根据电梯的运行状态和目标位置,实时调整电机的运行速度和方向,实现电梯的平稳运行。
3. 人机交互程序:编写人机交互程序,实现用户与电梯系统的友好交互,包括显示楼层信息、运行状态等。
4. 故障诊断与保护程序:编写故障诊断与保护程序,实时监测电梯的运行状态和传感器信号,一旦发现异常情况,立即采取相应措施,确保电梯的安全运行。
五、系统实现与测试在完成硬件和软件设计后,进行系统实现与测试。
桥式起重机控制系统设计毕业论文

桥式起重机控制系统设计毕业论文目录1绪论 (1)1.1传统桥式起重机控制系统存在的问题 (1)1.2桥式起重机电气传动技术的国内外发展概况 (1)1.3本课题的研究意义及主要内容 (2)2矢量控制变频调速 (4)2.1变频调速的基本原理 (4)2.2变频器的基本结构 (6)2.3变频调速的控制方式—矢量控制方式 (6)3 变频调速桥式起重机系统总体方案设计和部件选型 (8)3.1桥式起重机系统 (8)3.1.1各机构组成和特点 (8)3.1.2传统桥式起重机机的电气控制系统 (8)3.2本系统总体方案设计 (9)3.3系统的部件设计 (10)3.3.1电机的选用 (10)3.3.2变频器的选用 (12)3.3.3常用辅件的选择 (16)4可编程序控制器在桥式起重机变频控制系统中的应用 (19)4.1 PLC的系统组成与各部分的作用 (19)4.2可编程序控制器 (19)4.3变频调速起重机控制系统设计 (20)4.3.1系统控制的要求 (20)4.3.2控制系统的I/O点及地址分配 (20)4.3.3 PLC配置 (22)4.3.4.电气控制系统原理图 (23)4.3.5各机构的安全保护及检测 (25)5桥式起重机变频调速系统软件设计 (27)5.1 S7一200PLC网络的通信协议及本系统采用的通信协议 (27)5.1.1 S7-200PLC网络的通信协议 (27)5.1.2本系统采用的通信协议 (27)5.1.3上位机和PLC之间的通信 (27)5.2 PLC程序设计 (29)5.2.1 PLC编程软件概述 (29)5.2.2 程序设计 (30)5.3系统抗干扰措施 (37)6全文总结及其展望 (38)6.1全文总结 (38)6.2研究展望 (39)参考文献 (40)致谢 (41)1绪论1.1传统桥式起重机控制系统存在的问题桥式起重机作为物料搬运机械在整个国民经济中有着十分重要的地位。
但在实际使用中,结构开裂仍时有发生。
交直流调速系统复习题及答案
交直流调速系统复习题及答案一、判断题:(判断题正确打T,错误打F)1、当系统机械特性硬度相同时,理想空载转速越低,静差率越小。
(F)2、如果系统低速时的静差率能满足要求,则高速时肯定满足要求。
(T)3、电流截止负反馈是一种用来限制主电路过电流的方法。
(T)4、电压负反馈调速系统的调速精度要比转速负反馈的精度高。
(F)5、电压负反馈调速系统不能补偿电动机电枢电阻引起的转速降。
(T)6、要改变直流电动机的转向,可同时改变电枢电压和励磁电压的极性。
(F)7、在转速电流双闭环调速系统中,转速调节器的输出电压是电流环的给定电压。
(T)8、α=β工作制可以消除直流平均环流,但不能消除瞬时脉动环流,故称作有环流可逆调速系统。
(T)9、调速系统工程设计方法中,典型Ⅱ型系统是由两个积分环节、一个惯性环节和一个二阶微分环节组成的单位反馈系统。
(F)10、相对于单闭环控制,双闭环调速系统中内环的存在可以及时抑制环内的扰动。
(T)11、用工程设计法设计直流双闭环调速系统时,其中电流环既可设计成典型I型,也可设计成典型II型。
(T)12、绕线式异步电动机串级调速属转差功率回馈型调速。
(T)13、电流源型变频器比电压源型变频器的调速动态响应慢。
(F)14、从电源的性质出发,可将静止式变频装置分为两类:电压源和电流源型变频装置。
(T)15、用工程设计法设计直流双闭环调速系统时,要先设计内环后设计外环。
(T)16、α=β工作制可以消除直流平均环流和瞬时脉动环流,故称作无环流可逆调速系统。
(F)17、电气串级调速系统具有恒转矩调速特性。
(T)18、工程设计法中,近似处理的原则是近似前后的相角裕度不变。
(T)19、电动机可逆运行的本质是电磁转矩可逆。
(T)20、调速系统工程设计方法中,典Ⅰ系统是由一个积分环节和一个惯性环节串联而成的单位反馈系统。
(T)21、异步电机的变频调速属转差功率不变型调速,是各种调速方案中性能最好的一种方法。
机电一体化试题(判断、选择、填空)
一、单项选择题1)CKD系列某一数控铣床工作台进给用的滚珠丝杆副,已知平均工作载荷Fm=4000N,丝杠工作长度L=1.4m,平均转速nm=100r/min,丝杠材料为CrWMn钢,求滚珠丝杠的计算载荷FC。
设载荷系数fw,可靠性系数fc,精度系数fa,则FC的计算公式为( FC=fwFm/fafc )。
2)DELTA机构指的是(机器人)的一种类型。
3)FMC是表示(柔性制造单元)。
4)FMS加工中心的刀库有(转塔式)等基本类型。
5)FMS适用于下述何种生产类型(A. 单件、小批 B. 大批量、多品种 C. A和B D. 不确定)。
6)Mechatronics是两个不同学科领域名称的组合,这两个不同的学科是(机械学与电子学)。
7)SCARA机构的机器人属于一种(平面关节型工业机器人)。
8)步进电动机,又称电脉冲马达,是通过(脉冲的数量)决定转角位移的一种伺服电动机。
9)齿轮传动的总等效惯量随传动级数(增加而减小)。
10)传感检测)装置是电机一体化系统的感觉器官,它可以从待测对象那里获取能反应待测对象特性和状态的信息。
11)打字机)不是机电一体化产品。
12)对进行二维平面作业的工业机器人需要几个自由度(三个)。
13)对于只进行二维平面作业的工业机器人只需要三自由度,若要使操作具有随意的位姿,则工业机器人至少需要几个自由度(六个)。
14)工业机器人的自由度数取决于什么所要求的动作(作业目标)。
15)光固化成型又称为光敏液相固化法、立体光刻等,是最早出现的、技术最成熟和应用最广泛的快速原型技术。
它的缩写是(SLA)。
16)滚珠丝杠副结构外循环方式不包含(内、外双循环)17)滚珠丝杠副结构外循环方式不包含(内、外双循环)。
18)机电一体化系统(产品)设计方案的常用方法无(经验法)。
19)机电一体化系统的核心是(控制器。
20)机电一体化系统的基本功能要素之一接口的基本功能是(放大 B. 传递 C. 以上三者 D. 交换)21)机电一体化系统的接口中,功率放大器用于(电子—电气接口)22)机电一体化系统的支承部件主要有旋转支承部件和移动支承部件,下面(空心圆锥滚子轴承)为机电一体化系统的旋转支承部件。
运动控制期末必考题

运动控制期末必考题⼀、填空题1、直流电动机有三种调速⽅案:(1)调节电枢供电电压U;(2)减弱励磁磁通Φ;(3)改变电枢回路电阻R。
2、当电流⼤到⼀定程度时才出现的电流负反馈,叫做电流截⽌负反馈。
3、额定励磁状态下的直流电动机电枢电流与直流电动机的电磁转矩成正⽐。
4、他励直流电动机的调速⽅法中,调压调速是从基速(额定转速)往下调,在不同转速下容许的输出恒定,所以⼜称为恒转矩调速。
调磁调速是从基速往上调,励磁电流变⼩,也称为弱磁调速,在不同转速时容许输出功率基本相同,称为恒功率调速。
5、直流调速系统的静态性能指标主要包括静差率和调速范围。
6、在⽐例积分调节调节过程中,⽐例部分的作⽤是迅速响应控制,积分部分的作⽤是消除稳态误差。
7、采⽤积分速度调节器的闭环调速系统是⽆静差的。
8、直流调速系统中常⽤的可控直流电源主要有旋转变流机组、静⽌式可控整流器和直流斩波器或脉宽调制变换器三种。
9、所谓稳态是指电动机的平均电磁转矩与负载转矩相平衡的状态。
10、在额定负载下,⽣产⼯艺要求电动机提供的最⾼转速和最低转速之⽐叫做调速范围。
11、负载由理想空载增加到额定值时所对应的转速降落与理想空载转速之⽐叫做静差率。
12、⼀个调速系统的调速范围,是指在最低转速时还能满⾜所需静差率的转速的可调范围。
13、反馈控制的作⽤是抵抗扰动、服从给定。
14、脉宽调制的⽅法是把恒定的直流电源电压调制成幅值相同、频率⼀定、宽度可变脉冲序列,从⽽可以改变平均输出电压的⼤⼩,以调节转速。
15、调速系统的要求有调速、稳速、加,减速。
16、直流电动机在调速过程中,若额定转速相同,则转速越低时,静差率越⼤。
17、在转速、电流双闭环直流调速系统中转速调节器的输出作为电流调节器的输⼊,再⽤电流调节器的输出去控制电⼒电⼦变换器。
18、双闭环调速系统在正常运⾏时, ACR 调节器是不会达到饱和的。
19、反馈控制系统所能抑制的知识被反馈环包围的前向通道上的扰动。
电力拖动自动控制系统试卷-科创学院

电力拖动自动控制系统一、单项选择题1.当负载相同时,闭环系统稳态速降只为开环系统稳态速降的()倍。
A. 1/KnB. 1/(1+Kn)C. KnD. (1+Kn)2.闭环调速系统设置了两个调节器,即电流调节器和()调节器。
A.转速B.转差C.电压D.电流3.在电机调速控制系统中,对于()的扰动,系统是无能为力的。
A.运算放大器的参数的变化B.电机励磁电压的变化C.转速反馈参数的变化D.电网电压的变化4.带有比例调节器的单闭环直流调速系统,如果转速的反馈值与给定值相等,则调节器的输出为()。
A.零B.大于零的定值C.小于零的定值D.保持原先的值不变5.无静差调速系统的PI调节器中P部份的作用是()。
A.消除稳态误差B.既消除稳态误差又加快动态响应C.加快动态响应D.不能消除稳态误差也不能加快动态响应6. a = P配合控制有环流可逆调速系统中存在的是()环流。
A.直流B.动态C.平均D.脉动7.配合控制可逆调速系统运行在第二象限,整流装置的输出电压方向与电机反电势方向相反,此时是()状态。
A.正组待整流,反组逆变,电机电动B.正组待逆变,反组整流,电机反接制动C.正组待整流,反组逆变,电机回馈制动D.正组待逆变,反组整流,电机回馈制动8.转差频率控制变频调速系统的基本思想是控制()。
A.电机的调速精度B.电机的动态转矩C.电机的气隙磁通D.电机的定子电流9. SPWM逆变器是利用正弦波信号与三角波信号相比较后,而获得一系列()的脉冲波形。
A.等幅不等宽B.等宽不等幅C.等幅等宽D.不等宽不等幅10.按转子磁场定向和矢量控制变频调速系统中,在()条件下,有电动机转矩与定子电流转矩分量成正比的关系。
A.气隙磁通恒定B.转子电流恒定C.转子磁链恒定D.定子电流恒定滞后60°11.典型I型系统的超调量一般比典型H型系统(),而快速性要好。
A.大B.小C.相同D.无法比较12.电动机的调速范围D可以由以下哪一项表示()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
变频调速系统设计可以分为两个重要部分,软件设计与硬件设计。
本设计首先简要阐述ﻫ了变频调速的基础技术,SPWM理论及常用的设计方法等。
然后对变频调速的硬件做了系统电路地描述。
对整个系统的主电路、控制电路、各种保护电路及控制实现的软件都进行了ﻫ系统的分析。
主电路部分给出了整流、滤波、逆变器等器件各个环节的参数的计算。
控制电ﻫ路采用TMS320F2812、显示电路、输入电路、检测电路等,并配备了系统保护电路。
在硬ﻫ件电路的基础上,用MATLAB工具对系统进行了开环和闭环系统的SPWM仿真。
仿真实验结果表明,这些设计使系统能够可靠工作,运行状态良好,达到了设计目的。
最后给出了各个软件设计的系统流程图。
ﻫ关键词:变频调速,正弦波脉宽调制,IPM,智能功率模块,SPwM,TMS320F28124一Summary-ﻫThevariablespeedCallﻫbedivided into twoﻫimportant parts:soft designﻫandhardwareﻫdesign.Thedesignfirstly explainsﻫthebasicﻫtechniques.ofﻫthe variablespeed,thetheoryandmethodof theSPWM.Then themajorﻫhardwarecircuit isintroduced,EspecillyﻫTMS320F2812 andIPM.Theﻫcalculation aboutﻫparameterﻫismadein theﻫmajorﻫcircuit.At the same time thesecurityof the circuit wasﻫequipped.ﻫDSPwasﻫregardedas the controller core of the SPWM.We establishﻫasystemmodelﻫwhichcontrolsystem speed openand closeﻫloopwith SPWM,wesimulate andﻫanalyzethe controlﻫsystem throughMATLAB.Thesimulation results demonstrate that it isaﻫhighvalue topopularizeﻫandﻫapplyﻫtheﻫcontrolling system.Final lyThedesignﻫalsogaveﻫthe flow chart about the softﻫdesign.ﻫKeyﻫword:varibl efreqency adjusting speed,,IPM,SPWMPowerﻫSupplyModuleTMS320F2812,ﻫ5贵州大学硕士学位论文ﻫ附:学位论文原创性声明和关于学位论文使用授权的声明原创性声明ﻫ本人郑重声明:所呈交的学位论文,是本人在导师的指导下, 独立进行研究所取得的成果。
除文中已经注明引用的内容外,本ﻫ论文不包含任何其他个人或集体已经发表或撰写过的科研成果。
ﻫ对本文的研究曾做出重要贡献的个人和集体,均已在文中以明确ﻫ方式标明。
本人完全意识到本声明的法律责任由本人承担。
论文作者签名:也是垒El 期:ﻫ2QQ涩生≤旦关于学位论文使用授权的声明本人完全了解贵州大学有关保留、使用学位论文的规定,同ﻫ意学校保留或向国家有关部门或机构送交论文的复印件和电子ﻫ版,允许论文被查阅和借阅;本人授权贵州大学可以将本学位论ﻫ丈的全部或部分内容编入有关数据库进行检索,可以采用影印、ﻫ缩印或其他复制手段保存论文和汇编本学位论文。
ﻫ(保密论文在解密后应遵守此规定)论文作者签名:德题导师签名:鞋日霸:贵州大学硕士学位论文1.1交流调速的意义ﻫ电动机及其控制在国民经第一章交流调速的发展ﻫ济中起着重要作用。
无论是在工农业生产、运输、国防宇航、ﻫ医疗卫生、商务与办公设施还是日常生活中的家用电器,都广泛地使用各种各样的电动机。
电动机是电能应用的主要形式,是应用最广泛到机械能的变换装置,世界上超过60%的发电量用于驱动各种各样的以电动机的为基础的电力传动装置与系统。
其中许多的机械有着调速的要求,如车辆、机床、造纸机械、纺织机械等等。
另一类设备如风机、水泵等节约电能也ﻫ需要调速。
为了减少运行的损耗,满足生产工艺等要求为目的,需要对电动机进行调速控制。
ﻫ鉴于直流传动具有优越的调速性能,高性能可调速系统一般采用直流电动机。
在过去,ﻫ直流电动机调速系统占据主导地位。
但是直流电动机本身在机构上存在严重的问题,它的机ﻫ械接触式换向器不但结构复杂、制造复杂、生产周期长、价格昂贵;而且运行中容易产生火ﻫ花,以及更换机械强度不高,电刷易于磨损等,在运行中需要有经常性的维护,同时对环境的要求也比较高,不能使用于化工、矿山等周围环境中,如有粉尘、腐体和易燃、易爆气体ﻫ的场合:即便应用在车辆牵引上,也感到维护检修不便,特别是由于换向问题的存在,直流ﻫ电动机无法做成高速大容量的机组,目前高速直流电动机所能做到的最大容量只有400千瓦ﻫ左右,低速的也只能做到几千千瓦,容量较大的直流电机往往要做成双电枢,远远不能适应ﻫ现代生产向高速大容量化发展的要求。
众所周知,直流他励电动机是一种控制性能非常优越的电动机,因为于几何中性线上,电机的励磁回路所产生的励磁电流与电枢回路所产生的电ﻫ枢电流在空间是相互垂直的。
若不考虑磁路饱和的影响,它们之间没有耦合关系,互不影响,ﻫ可以分别独立进行调节,所以它调速方便,只要改变电机的输入电压电流,就可以在宽广的范围内实现无级调速,而且在磁场一定的条件下它和电枢电流成正比,它的转矩易于控制,ﻫ因此直流电动机调速系统比较容易得到良好的动态特性,所以过去直流电动机调速系统一直在变速传动领域中占主导地位。
而交流电机早在十九世纪八十年代中期就己问世,由于它具ﻫ有消耗原料少、制造成本低、结构牢固、运行安全可靠、环境适应性强以及易于向高压、高ﻫ速度和大容量方向发展等特点,迅速得到广泛的应用。
这种所谓的不变速系统是指交流电机本身不进行调速,而为了达到对整个系统的控制又不得不采用其它的措施进行调速,从而白自消耗了大量的电能。
这样,如何从本质上改变交流电机调速控制特性,使之具有直流电机ﻫ1贵州大学硕士学位论文ﻫ的调速性能,便成为近几十年来电气传动研究工作者努力研究的主要课题之一。
交流调速系统具有以下几个主要优点:交流电动机的价格远低于直流电动机,而且结构ﻫ简单、重量轻、制造方便、坚固耐用、可靠性和运行效率高,不易出故障,维修工作量小;使用场合没有限制,在恶劣的甚至是含有易燃易爆性气体的环境中安全运行;单机容量远大ﻫ于直流电动机。
正是由于交流电动机的这种优势,使它在电力拖动系统中的应用范围比直流ﻫ电动机要广泛得多,约占整个电力拖动总容量的80%以上。
在整个电机调速中有重要的地位。
而制约交流调速发展的重要原因是,交流电机是高阶、多变量、强耦合、非线性系统,与直流电机相比,转矩难于控制。
ﻫ交流变频调速技术是集电力电子技术、微电子技术、电机学及自动控制于一身的一项ﻫ技术高度发展的产物,它是通过改变电动机定子供电频率来控制转速,从而实现交流电动ﻫ机调速的一种方法。
交流变频调速以其调速范围广,平滑性好,具有优良的动静态特性,显著的节能效果和广泛的适用性被公认为应用性好、效率高,是理想的电气传动方案。
随ﻫ着电力电子学与电子技术的发展,新型电力电子器件不断涌现,微处理器的进步,使得采ﻫ用半导体交流技术的交流调速系统得以实现,特别是大规模集成电路和计算机控制技术的ﻫ发展,以及现代控制理论的不断创新,为交流电力传动的开发创造了有利条件,使得交流电力传动加宽了调速范围、提高了稳速精度、快的动态响应以及在四象限作可逆运行的技术性能。
随着各种功率半导体开关器件的相继问世,使得长期阻碍变频技术推广应用的关键问题一如何构成经济、可靠的高性能大功率变频器得到解决,从而使变频调速方式在工ﻫ业应用中显示出强大的生命力。
近年来,随着数字化控制的变频调速系统获得巨大发展,先进的控制理论(如磁场定向矢量控制、直接转矩控制)被广泛应用,变频装置中的电器件ﻫ如IGBT、IGCT等性能大大提高,同时核心控制计算机从16位机发展到普遍使用高速数字信号处理器(DSP),来进行复杂的控制算法运算,快速运算和高精度控制。
现代的数字化控ﻫ制变频调速系统噪声大大降低,耗电大幅度减少,并且可以得到良好的电流波形,从而使系统更加可靠。
同时调速范围、调速精度、动态响应、输出性能、功率因数、运行效率和ﻫ使用性等方面都是不可比拟的。
目前全数字化控制变频调速电流响应可达到0.卜0.7ms,ﻫ速度响应可达到2-4 ms,足以满足传动领域当前的需要。
交流调速系统发生了质的飞跃,逐步取代直流调速系统,成为主要的传动装置,现代高速列车、地铁、电动汽车都采用了ﻫ交流调速系统。
2ﻫ贵州大学硕士学位论文1.2ﻫ电力电子技术ﻫ变频技术是建立在电力电子技术基础之上的。
在低压交流电动机的传动控制中,应用ﻫ最多的功率器件有GTO、GTR、IGBT以及智能模块IPM(IntelligentPower Module),后面ﻫ两种集GTR的低饱和电压特性和MOSFET的高频开关特性于一体,是目前变频系统和通用变ﻫ频器中最广泛使用的主流功率器件。
IGBT作为第二代的电力电子器件,它的应用使变频器的性能有了很大的提高,主要表现为:ﻫ>发热减少,将曾占主回路发热50—70%的器件发热降低了30%:ﻫ>ﻫ高载波控制,使输出电流波形有明显改善:ﻫ> 提高开关频率,实现了电机运行的静音化:ﻫ>驱动功率减少,体积趋于更小;ﻫ智能功率模块(IP M)是向第四代器件功率集成电路(PIC)的过渡产品,是微电子技术和ﻫ电力电子技术相结合的产物。
它不但提供一定功率输出能力,而且具有逻辑、控制、传感、ﻫ检测、保护和自诊断等功能。
IPM具有以下特点: ◆开关速度快,驱动电流小,控制驱动更为简单;ﻫ◆采用了隔离技术,散热更均匀,体积更加紧凑;◆ﻫ集成度高,它集成了驱动电路、保护电路甚至光耦,大大缩短开发时间:ﻫ◆内含电流传感器,可以高效迅速地检测出过电流和短路电流,能对功率芯片给予足够的保护,故障率大大降低;ﻫ◆保护功能丰富,如电流保护、电压保护、温度保护等一应俱全,实现了ﻫ信号处理、故障诊断、自我保护等多种智能功能,既减小了体积、减轻了重量,又提高了可靠性;ﻫ◆由于在器件内部电源电路和驱动电路的配线设计上做到优化,所以浪涌ﻫ电压,门极振荡,噪声引起的干扰等问题能有效得到控制;◆很高的性能价格比,IPM的售价已逐渐接近IGBT,而采用IPM后的开关电源容量、驱动功率容量的减小和器件的节省以及综合性能提高等因素ﻫ3贵州大学硕士学位论文ﻫ后在许多场合其性价比己高过IGBT,有很好的经济性;目前IPM己经在工业变频器(中、小功率)中被大量采用,随着技术的不断改进,IPM的功率也越来越大。