发酵pH值自动控制系统MATLAB仿真
(最新版)自动控制原理MATLAB仿真实验报告
实验一 MATLAB及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、预习要点1、系统的典型响应有哪些?2、如何判断系统稳定性?3、系统的动态性能指标有哪些?三、实验方法(一)四种典型响应1、阶跃响应:阶跃响应常用格式:1、;其中可以为连续系统,也可为离散系统。
2、;表示时间范围0---Tn。
3、;表示时间范围向量T指定。
4、;可详细了解某段时间的输入、输出情况。
2、脉冲响应:脉冲函数在数学上的精确定义:其拉氏变换为:所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式:①;②③(二)分析系统稳定性有以下三种方法:1、利用pzmap绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出的极点。
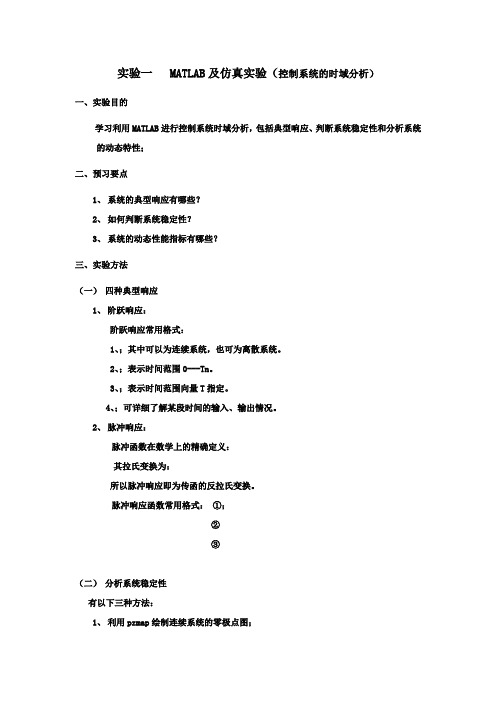
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den) 运行结果: p =-1.7680 + 1.2673i -1.7680 - 1.2673i 0.4176 + 1.1130i 0.4176 - 1.1130i -0.2991P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
自动控制原理MATLAB仿真实验报告

实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
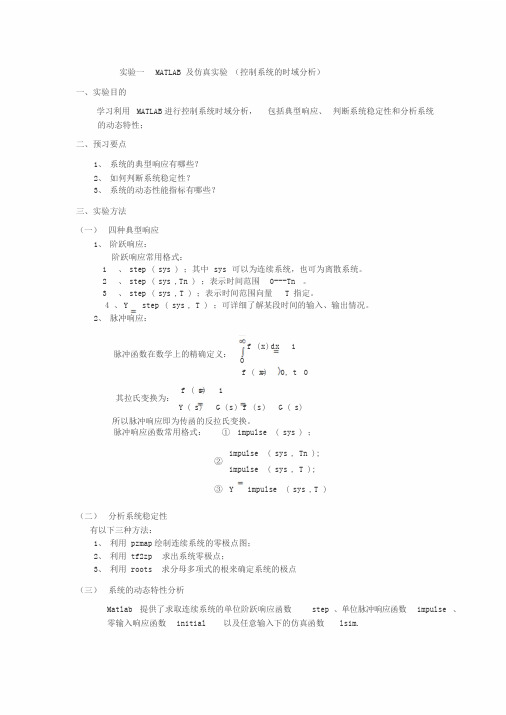
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
自动控制原理MATLAB仿真实验报告
实验一MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、预习要点1、系统的典型响应有哪些?2、如何判断系统稳定性?3、系统的动态性能指标有哪些?三、实验方法(一)四种典型响应1、阶跃响应:阶跃响应常用格式:1 、step ( sys ) ;其中 sys 可以为连续系统,也可为离散系统。
2 、step ( sys ,Tn ) ;表示时间范围0---Tn 。
3 、step ( sys ,T ) ;表示时间范围向量T 指定。
4 、Y step ( sys , T ) ;可详细了解某段时间的输入、输出情况。
2、脉冲响应:f (x)dx 1脉冲函数在数学上的精确定义:f ( x) 0, t 0f ( s) 1其拉氏变换为:Y ( s) G (s) f (s) G ( s)所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式:①impulse ( sys ) ;impulse ( sys , Tn );②impulse ( sys , T );③Y impulse ( sys ,T )(二)分析系统稳定性有以下三种方法:1、利用 pzmap绘制连续系统的零极点图;2、利用 tf2zp 求出系统零极点;3、利用 roots 求分母多项式的根来确定系统的极点(三)系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容(一) 稳定性1.系统传函为4 3 23s 2s 5s 4s 6G s ,试判断其稳定性5 4 3 2s 3s 4 s 2s 7s 22.用 Matlab 求出2s 2 s 2G 的极点。
( s)4 3 2s 7 s 3s 5 s 2%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果:p =-1.7680 + 1.2673i-1.7680 - 1.2673i0.4176 + 1.1130i0.4176 - 1.1130i-0.2991Pole-Zero Map 1.510.5sixAyranigamI-0.5-1-1.5-2 -1.5 -1 -0.5 0 0.5Real Axis图 1-1 零极点分布图由计算结果可知,该系统的 2 个极点具有正实部,故系统不稳定。
matlab 控制系统仿真
摘要MATLAB语言是一种十分有效的工具,能容易地解决在系统仿真及控制系统计算机辅助设计领域的教学与研究中遇到的问题,它可以将使用者从繁琐的底层编程中解放出来,把有限的宝贵时间更多地花在解决科学问题上。
MATLAB GUI 是MATLAB的人机交互界面。
由于GUI本身提供了windows基本控件的支持,并且具有良好的事件驱动机制,同时提供了MATLAB数学库的接口,所以GUI 对于控制系统仿真的平台设计显得十分合适。
GUI对于每个用户窗口生成.fig和.m 文件。
前者负责界面的设计信息,后者负责后台代码的设计。
本文所做的研究主要是基于MATLAB GUI平台,结合控制系统基础理论和MATLAB控制系统工具箱,实现了用于控制系统计算机辅助分析与设计的软件。
本软件主要功能:实现传递函数模型输入、状态方程模型输入、模型装换、控制系统稳定性分析、系统可观性可控性判断,绘制系统奈奎斯特图、波特图、根轨迹图以及零极点分布图。
在继续完善的基础上能够用于本科自动控制原理教程的教学实验和一般的科学研究。
关键词:控制系统;MATLAB GUI;计算机辅助设计AbstractMATLAB language is a very effective tool,and can be easily resolved in the system simulation and control system of teaching in the field of computer-aided design and research problems,it could be the bottom of the user from tedious programming liberate the limited spend more valuable time to solve scientific problems.The MATLAB GUI is the interactive interface.As the GUI itself provides the basic control windows support,and has a good mechanism for event-driven,while providing the MATLAB Math Library interface,the GUI for control system simulation platform for the design of it is suitable. GUI window generated for each user. Fig and.M file. The former is responsible for the design of the interface information,which is responsible for the design of the background code.Research done in this article is mainly based on MATLAB GUI platform,the basis of combination of control system theory and MATLAB Control System Toolbox,the realization of control systems for computer-aided analysis and design software. The main functions of the software: the realization of transfer function model input,the state equation model input,the model fitted for the control system stability analysis,system observability controllability judgments、rendering the system Nyquist diagram、Bode plots、root locus and Pole-zero distribution. While continuing to improve based on the principle of automatic control can be used for undergraduate teaching course experiments and scientific research in general.Key words:Control System;MATLAB GUI; Computer-assistant design目录第1章概述 (1)1.1 论文选题背景和意义 (1)1.2 计算机辅助分析与设计在控制系统仿真中的发展现状 (1)1.3 本文主要内容 (3)第2章控制系统与MATLAB语言 (4)2.1 控制系统理论基础 (4)2.2 MATLAB语言与控制系统工具箱 (5)第3章 MATLAB GUI简介及应用 (9)3.1 MATLAB GUI (9)3.2 软件设计步骤 (10)第4章仿真系统测试与演示 (16)4.1 控制系统的模型输入 (16)4.2 控制系统的稳定性分析 (19)4.3 控制系统可控可观性分析 (20)4.4 控制系统频率响应 (23)4.5 控制系统时域响应 (27)4.6 控制系统根轨迹绘制 (28)结论 (31)参考文献 (32)致谢 (33)第1章概述1.1 论文选题背景和意义自动控制原理是自动控制专业和自动化专业的主要课程之一,是研究自动控制技术的基础理论课,是必修的专业基础课程。
基于MATLAB的《自动控制系统》仿真实验系统实现
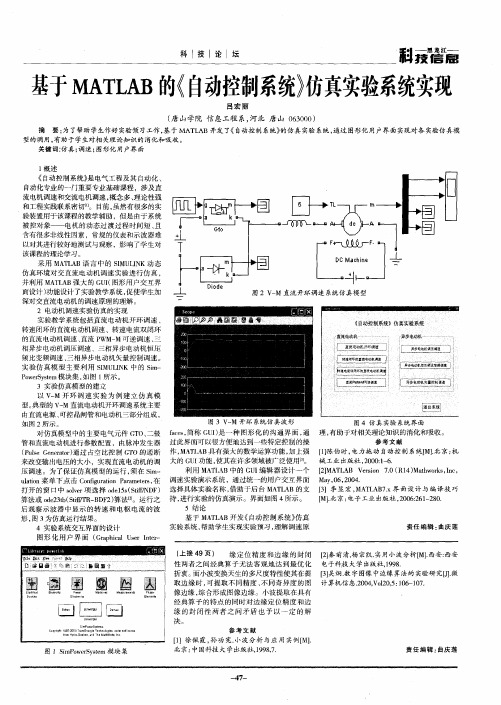
图 4 仿 真 实验 系统 界 面 理, 有助于对相关理论知识的消化和吸收。
参 考文 献
f] 伯 时 , 1陈 电力 拖 动 自动 控 制 系 统 [ . 京 : M】 北 机
械 工 业 出版 社 . 0 01 6 2 0 :- .
[] T A V rin . R1 ) tw rsIc 2MA L B es 7 o 0( 4 Mah ok , , n
由直 流电源 、 可控晶闸管和电动机 _ 二部分组成 , 如 网 2所示 。 对仿真模 型中的主要电气元件 G O 二极 T 、 管 和直流 电动机进行参数配置 ,由脉冲发生器 ( us e ea r通过 占空 比控制 GT P l G nrt ) e o O的通断 来改变输 出电压的大小 ,实现直流电动机的调 压调速 。为了保证仿 真模 型的运行 , 须在 S — i e r uai ltn菜单下点 击 C n grt n P rm tr, o of uao aa ees 在 i i 打开 的窗 口中 s vr 选择 oe5 (b D ) o e项 l d ls s N F 算法或 o e3 (tf R B F ) d2 t S fT — D 2 算法 b i/ 。运行 之 后观 察示波 器 中显示 的转速 和 电枢 电流 的波 形, 3 图 为仿真运行结果 。 4实验系统交互界 面的设计 图形 化 用户 界 面 ( rp ia U e ne一 G ahcl srIt r
直 流 开 环 调速 系统 仿 真模 型
实验 仿真模 型 主要利 用 SM LN 中的 S — I U IK i m Pw r s m模 块集 , o e yt S e 如图 1 所示 。 3实验仿真模型的建立 以 V M开 环 调速 实 验 为例 建 立仿 真模 — 型。 典型的 V M直流 电动机开环调速系统主要 —
matlab仿真自动控制原理

matlab仿真自动控制原理
MATLAB仿真自动控制原理
自动控制原理是研究自动调节系统的基本理论和方法,MATLAB作为一款强大的数学仿真软件,为自动控制原理的研究提供了良好的平台。
MATLAB在自动控制原理的研究中,主要包括以下内容:
1. 系统动态模型的建立:根据自动调节系统的特性及其输入输出关系,建立数学模型,并进行仿真。
2. 系统稳态性能分析:计算系统的稳态误差和静态增益等指标,确定系统的增益校正和调节参数。
3. 系统动态性能分析:分析系统的过渡过程、阻尼比和动态特性,确定系统的控制参数。
4. 设计控制器:根据系统模型和目标性能要求,设计合适的控制器,如比例积分控制器、比例积分微分控制器等。
5. 仿真验证:通过MATLAB仿真,验证控制器的性能和控制效果。
通过MATLAB仿真自动控制原理,不仅可以方便地进行各种控制系统的设计与分析,同时也可以通过仿真验证的方法,快速评估和分析不同控制策略的优劣,提高控制系统的稳定性和性能。
自动控制原理Matlab仿真应用
控制系统的MATLAB 仿真1 MATLAB 简介MATLAB 是Mathworks 公司开发的一种集数值计算、符号计算和图形可视化三大基本功能于一体的功能强大、操作简单的优秀工程计算应用软件。
MATLAB 不仅可以处理代数问题和数值分析问题,而且还具有强大的图形处理及仿真模拟等功能。
从而能够很好的帮助工程师及科学家解决实际的技术问题。
MATLAB 的含义是矩阵实验室(Matrix Laboratory ),最初主要用于方便矩阵的存取,其基本元素是无需定义维数的矩阵。
经过十几年的扩充和完善,现已发展成为包含大量实用工具箱(Toolbox )的综合应用软件,不仅成为线性代数课程的标准工具,而且适合具有不同专业研究方向及工程应用需求的用户使用。
MATLAB 最重要的特点是易于扩展。
它允许用户自行建立完成指定功能的扩展MATLAB 函数(称为M 文件),从而构成适合于其它领域的工具箱,大大扩展了MATLAB 的应用范围。
目前,MATLAB 已成为国际控制界最流行的软件,控制界很多学者将自己擅长的CAD 方法用MATLAB 加以实现,出现了大量的MATLAB 配套工具箱,如控制系统工具箱(control systems toolbox ),系统识别工具箱(system identification toolbox ),鲁棒控制工具箱(robust control toolbox ),信号处理工具箱(signal processing toolbox )以及仿真环境SIMULINK 等。
(1) MATLAB 的安装本节将讨论操作系统为Microsoft Windows 环境下安装MATLAB6的过程。
将MATLAB6的安装盘放入光驱,系统将自动运行auto-run.bat 文件,进行安装;也可以执行安装盘内的setup.exe 文件启动MATLAB 的安装程序。
启动安装程序后,屏幕将显示安装MATLAB 的初始界面,根据Windows 安装程序的常识,不断单击[Next],输入正确的安装信息,具体操作过程如下:输入正确的用户注册信息码;选择接收软件公司的协议;输入用户名和公司名;选择MATLAB 组件(Toolbox );选择软件安装路径和目录;单击[Next]按钮进入正式的安装界面。
MATLAB控制系统仿真实验模板新
MATLAB控制系统仿真实验模板新
建立一个MATLAB控制系统仿真实验模板,可以按照以下步骤进行:
1. 定义系统模型:定义系统的数学模型,包括传递函数、状态空间方程或差分方程等。
2. 设计控制器:根据系统模型和控制要求,设计控制器,可以是PID控制器、模糊控制器、最优控制器等。
3. 选择仿真工具:选择MATLAB的Simulink仿真工具,可以通过拖拽元件和连接线的方式构建仿真模型。
4. 进行仿真实验:设置仿真参数,运行仿真实验,观察系统的动态响应和稳态性能。
5. 分析仿真结果:根据仿真结果,评价系统的控制效果,优化控制器设计或系统参数调整。
6. 输出实验报告:根据实验结果,输出实验报告,包括系统模型、控制器设计、仿真结果分析和结论等。
在创建模板时,可以使用MATLAB的模板功能,在文件-新建-模板选项中选择Simulink模板,然后选择控制系统仿真实验模板。
输入模板名称后保存即可。
使用模板时,可以根据具体实验要求修改系统模型、控制器、仿真参数等,以完成具体实验内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
发酵pH值自动控制系统MATLAB仿真孙颖1,李婷21. 东北大学人工智能所,沈阳(110004)2. 沈阳药科大学药物制剂教研室,沈阳(110004)E-mail:sunjunying@摘要:本文首先在查阅大量发酵相关文献的基础上,简述了发酵过程的相关概念及目前发酵过程的监控方法和自动控制现状;深入分析了发酵实验工艺流程及重要参数的监测与控制情况;完成了发酵实验装置和监控系统的设计和实现;同时建立了上位机监控软件RSView32与下位机RSLogix5000之间的连接。
针对发酵pH对象的复杂性,原控制算法过于简单、控制精度不高的问题,本文提出了积分分离PID算法应用于发酵pH控制,取得了比较理想的效果,并用仿真实验验证了该方法的有效性。
关键词:发酵pH,罗克韦尔PLC,变速积分PID,matlab仿真中图分类号:TP273+.11.引言近年来计算机在发酵过程的应用已大幅增加,各有关实验室和工厂普遍采用发酵过程计算机监控系统[1,2]。
从发酵监控系统的监控方法来看,目前用于发酵过程的实时控制和数据处理系统主要有单片计算机系统、工控机、PLC、集散控制系统(DCS)和现场总线系统(FCS)等,发酵生产的规模和应用场合不同要求不同的计算机监控系统配置[3]。
与其它行业相比较,计算机控制发酵系统还不很成熟,一些技术问题还有待于解决,如控制发酵系统结构尚不完善,其功能稳定性有待提高[4]。
大多发酵均是间歇反应过程,这就要求开关量和模拟量控制的要求同样严格,而且对开关量和模拟量的控制速度要求也不同,这就决定了单一继电控制、回路调节器和DCS均不能满足发酵的间歇生产过程或控制效果不好[5,6]。
Frank J.Romeu[7]对发酵过程、发酵监控系统及参数检测设备进行了分析,从方法论的角度研究基于DCS发酵过程监控系统的构建方法。
与工控机相比,DCS具有更高的可靠性,但控制系统的价格会大幅度提高,不适合中小型系统,此外,DCS还存在控制集中、系统封闭等弊端,正逐渐被现场总线控制系统所取代[8]。
PLC作为现代工业现场控制器,其体积小、通信能力强、使用方便,有开关量和模拟量控制功能,在工业过程控制中得到了广泛应用[9]。
由此,可以看出构建基于PLC的发酵监控系统将是发酵过程控制的发展方向之一。
天津科技大学王秀清[10]等人基于西门子S7-200系列PLC构建了实验研究用发酵监控系统。
监控系统分为检测部分和控制部分。
系统通过EM235模拟量输入模块对发酵的温度、pH值、溶解氧进行了检测;控制部分实现了温度控制,pH值控制,流加控制和转速控制。
南忠良、严新忠[11]采用PLC和监控计算机的方式对14L发酵罐控制系统进行了改造,完成了对温度、pH值、压力、溶氧等参数的在线检测和控制,并根据发酵过程的特点,建立生物参量与pH值、溶解氧浓度DO的数学关系,实现对生物参量的在线软测量。
实验表明监控系统是有效的,软测量模型是可靠的。
本文以东北大学发酵实验室发酵罐pH为研究对象,采用罗克韦尔PLC监控系统,根据发酵过程的实际情况,利用下位机编程软件RSLogix5000编写发酵过程pH值控制梯形图,利用上位机监控软件RSView32开发相应的监控界面,通过PLC的通讯软件RSLinx来进行上位机与PLC之间的通讯,采用带模糊控制的变速积分PID算法对发酵过程的pH值进行较精确的控制。
2.控制系统2.1发酵实验装置与监控系统的设计与实现实验室生物发酵装置系统由发酵主反应器(图1)及其附属装置以及外围设备组成(图2)。
(1) 发酵主反应器及其附属装置实验室的发酵主反应器在第二章中有所介绍,它是由100L的发酵罐、10L的种子罐以及10L的补料罐组成,反应器采用的是江苏省镇江东方生物工程设备技术有限公司的无级变频调速机械搅拌发酵罐,与其相连的附属设备包括空气发生系统(空气压缩机及干燥机)、蒸汽处理系统(蒸汽发生器及过滤器)、水温加热系统(热水器)、电气控制系统(接线控制柜)、阀门管路及尾气检测设备(尾气分析仪)组成。
图1 发酵实验主反应器示意图(2) 发酵外围设备发酵外围设备包括高压蒸汽锅、离心机、冰箱、pH检测仪、显微镜、天平等。
各设备的作用为:高压蒸汽锅主要是对发酵过程中用于消泡的豆油、调节pH值的酸碱液及其插入针管进行提前灭菌消毒,保证其无菌;离心机和天平是用于发酵过程中对样品测量菌体浓度的(操作步骤见第二章菌体浓度的检测);冰箱的作用是存储离心后的上清液,等待之后的糖、氮含量检测;pH检测仪用于检测样品的pH值;显微镜的作用主要用于对样品的菌丝生长情况进行检查,以确定发酵进展情况和有无染菌。
图2 发酵主反应器及其附属设备关系图发酵实验室监控系统硬件部分包括西门子工控机、罗克韦尔自动化公司的Logix5550处理器、ControlNet网络模块以及1756I/O模块构成的PLC控制柜、一台打印机;软件部分采用罗克韦尔公司的下位机编程软件RSLogix5000、上位机监控软件RSView32和上位机与PLC通讯的软件RSLinx组成。
系统总体结构如图3所示。
图3 监控系统总体结构2.2发酵pH实验装置与监控系统的设计pH实验装置依据蠕动泵调节酸或碱的流量,因此蠕动泵是直接的控制装置;发酵罐的pH值须要反馈给PLC,进一步反馈给上位机,以便与pH的设定值进行对比,形成偏差,从而调节pH值;上位机监控软件通过PLC模块实现对蠕动泵、pH测定仪的控制。
选用罗克韦尔Logix5550控制器的1756-IB16D数字输入模块、1756-OB16D数字输出模块和1756-OF8模拟输出模块。
根据以上的设计思路,pH实验装置的硬件设计图如图4。
图4 pH实验装置的硬件设计结构图蠕动泵的各部分功能如下:(1)背面的红色按钮:弹出时为手动状态;按下时为外控状态。
(2) 外控状态接线:黑线: GND(地线);红线: 4-20mA;黄线: CW/CW(TTL电平,高电平正转,低电平反转)本实验采用直接与地连接,低电平反转;白线 STOP(TTL电平,高电平停止,低电平运行)。
pH实验装置采用罗克韦尔PLC监控系统,根据发酵过程的实际情况,利用下位机编程软件RSLogix5000编写发酵过程pH值控制梯形图,利用上位机监控软件RSView32开发相应的监控界面,通过PLC的通讯软件RSLinx来进行上位机与PLC之间的通讯。
2.3发酵pH自动控制系统的算法设计2.3.1 pH自动控制系统常规PID算法按偏差的比例(P-Proportional)、积分(I-Integral)和微分(D-Derivative)线性组合进行控制的方式,就是著名的PID 控制。
PID 控制早在30年代末期就已经出现,经过六十多年来不断的更新换代,由模拟PID 控制器发展到数字PID 控制器,己被广泛应用于工业过程控制[12]。
一个典型pH 值控制系统如图5所示,其中r 为给定信号,PID 表示控制器,P 为被控对象模型,d 为干扰量,e(k)为系统误差,u(k)为控制量,pH(k)为被控过程输出量。
图5 一个传统pH 控制系统常规的位置式数字PID 控制器的控制规律用式1,2表示0(){()()[()(1)]}k dp i j T T u k K e k e j e k e k T T==++−−∑ (1)()()()[()(1)]kp idj u k K e k K e j K e k e k ==++−−∑ (2)其中,()u k :PID 调节器的离散化输出量;()e k :PID 调节器的离散化输入量;p K :比例系数;i T :积分时间常数;d T :微分时间常数;i K :积分系数, i pi T K K T =;d K :微分系数, dd p T K K T=。
常规的PID 控制特点如下:(1) 比例控制的作用是:误差一旦产生,控制器立即就有控制作用,被控制朝着减小误差的方向变化,控制作用的强弱取决于比例系数Kp 。
但因为在中和过程中,中和点附近存在高增益的现象,比例系数Kp 势必不能太大,否则闭环系统不稳定。
另外,对于具有自平衡性(即系统阶跃响应终值为一有限值)的被控对象存在误差。
加大Kp 可减小静差,但Kp 过大时,会导致动态性能变坏,甚至使闭环系统不稳定。
(2) 积分控制的作用是:使系统消除稳态误差,提高无差度。
因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。
积分作用的强弱取决与积分时间常数Ti ,Ti 越小,积分作用就越强。
反之Ti 大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
积分作用常与另两种调节规律结合,组成PI 调节器或PID 调节器。
(3) 微分控制的作用是:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。
微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD 或PID 控制器。
由于常规PID 控制算法中的积分系数Ki 是常数,所以在整个控制过程中,积分增量不变,使得PID 参数整定不良,性能欠佳,很难适应发酵酸碱中和过程中被控对象非线性的特点。
通常在发酵工业pH 控制中一般不使用常规的PID 控制方法,而是采用对其进行改进的先进PID 控制算法。
2.3.2 pH 自动控制系统变速积分PID 算法在常规的PID 控制算法中,由于积分系数Ki 是常数,所以在整个pH 控制过程中,积分增量不变。
而pH 自动控制系统对积分项的要求是,系统偏差大时积分作用减弱甚至全无,而在偏差小时则应加强。
积分系数取大了会产生超调,甚至出现积分饱和,取小了又迟迟不能消除静差。
因此,如何根据系统偏差大小改变积分的速度,对于提高pH 自动控制系统品质是很重要的,变速积分PID 可较好的解决这一个问题。
变速积分PID 的基本思想是,设法改变积分项的累加速度,使其与偏差大小相适应,偏差越大,积分越慢;反之则越快。
为此,设置系数f[e(k)],它是e(k)的函数,当|e(k)|增大时,f 减小,反之增大。
变速积分的PID 积分项表达式为3:10(){()(())()}k i i j u k k e j f e k e k −==+∑ (3)系数f 与偏差当前值|e(k)|的关系设为线性的,如式4:1|()||()|[()]|()|0|()|e k BA e kB e k B e k A B A e k A B≤⎧⎪−+⎪=<≤+⎨⎪>+⎪⎩ (4) f 值在[0,1]区间内变化,当偏差|e(k)|大于所给分离区间A+B 后,f=0,不再对当前值e(k)进行继续累加;当偏差|e(k)|小于B 时,假如当前值e(k),即积分项变为0()()ki ij u k k e j ==∑,与一般PID 积分项相同,积分动作达到最高速;而当偏差|e(k)|在B 与A+B 之间时,则累加计入的是部分当前值,其值在0~|e(k)|,因此,其积分速度在10()k i j k e j −=∑和0()kij k e j =∑之间,其变速积分PID 算法为式5:1()(){()[()]()}[()(1)]k p i dj u k k e k k e j f e k e k k e k e k −==+++−−∑ (5)这种算法对A 、B 两参数的要求不精确,参数整定较容易。