基于RTLinux的转台控制系统研究
基于RTLinux_Linux的容错计算机联锁控制系统设计与实现

工业控制计算机测量与控制.2005.13(2) Computer Measurement &Control145收稿日期:2004-10-12;修回日期:2004-11-12。
基金项目:甘肃省自然科学基金项目(ZS003-B35-026-c);光电技术与智能控制教育部重点实验室开放基金项目(K04103)。
作者简介:董昱(1962-),男,副教授,主要从事铁路信号计算机联锁方向的研究。
文章编号:1671-4598(2005)02-0145-03 中图分类号:U 284 文献标识码:A基于RTLinux/Linux 的容错计算机联锁控制系统设计与实现董 昱,郑丽英,李敬文,王海龙(兰州交通大学信息与电气工程学院,甘肃兰州 730070)摘要:计算机联锁控制系统作为车站关键基础信号设备,不仅要具有高度的安全性、可靠性、实时性、可维护性、可用性,强大、快速的处理能力以及良好的可扩展性,还应具有良好的性能价格比。
基于RTLinux/Linux 的容错计算机联锁系统采用软硬件多级混合容错技术,确保系统可靠性和安全性的实现;利用RTLinux 的实时多任务处理能力,提供系统在分布式环境下实时通信能力;利用源代码公开的特点,保证系统具有良好的可扩展性及良好的性能价格比。
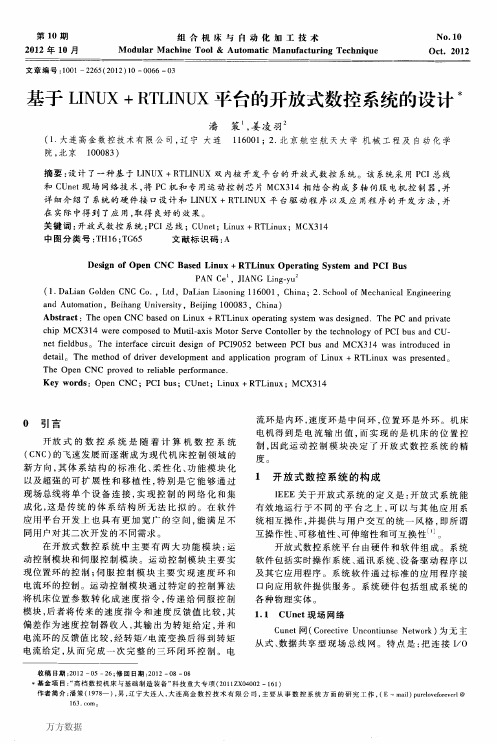
关键词:铁路信号;RTLinux/Linux;计算机联锁;容错;实时Design and Development of Fault -Tolerant Computer Interlocking ControlSystem based on RTLinux/LinuxDong Yu,Zheng Liying ,Li Jingw en(Scho ol of Infor matio n &Electrical Eng ineering Lanzho u Jiao tong U niversit y,L anzho u 730070,China)Abstact:T he Computer Interlockin g Control system,as a key basic railway s tation s ignaling equipment,mu st have the featur e of h igh security,r eliability,real-time,maintainab ility and u sab ility and also th e features of strong and rapid processin g an d friendly interfaces and good scalability.Th e computer in terlocking control system based on RTLin ux/Linux provides h igh r eliability and security by u sing m ulti-level mixin g fault-tolerant;Th e s ystem can commun ication in a distributed environm ent by means of the real tim e multi-task processing of RT Linux ;Th e system pr ovides good scalability an d perfor man ce/price by meansof open s ource cod e of Linux.Key words:railw ay signaling;RT Linux/Lin ux;computer interlocking;fault-toleran t;real-time图1 系统硬件图0 引言计算机联锁控制系统可以提高车站行车作业的安全和效率,是车站信号设备控制系统的发展方向,因此,选择可行的和具有良好性能价格比的接点结构,是实现铁路现代化的重要基础之一。
有关RTLINUX的原理和应用浅析

的优质服务 , 主要包括实时服务和标准的P O S I XF U ̄务 , 能够为用 模拟量任务主要是在系统中读取相应的模拟量值 , 这种模 拟量 户提供很大的便利。 该系统由于其本身的设计原理从而决定 了它在 值是属于通道号的 , 并且在读取 前要经过一定 时间的转换 , 这种 转 运行 时需要 独特的工作环境 , 在通用操作 系统的支持下 , RT L i n u x 换只有在任务启动之后才能实现 ; 开关量任务则是对开关量的信 号
控 系统从 而使 系统能够正常地进行操作 , 同时 , 还要将这些硬件设 RT L i n u x 作为L i n u x 系统 中的一个重要补 充, 它在本质上是一 备和 测控对象 实验装置连接 , 这 种装置有着 自己特 定的测控 对象 , 个微内核, 这个 内核是在L i n u x 的原理基础上形成的 , 它实 际上相当 这些测控对象 主要有各种类型的电动机和开关量 , 同时还包括多个 于一个“ 虚 拟机 ” 层。 在具体的操作过程 中, 它能够处理 系统 的实 时 模拟量 , 这些模拟量是属于模拟模型小型变 电站的一部分 , 连接 的 进程 , 这种独特 的功 能使得 它看上去就是一款实际的硬件 , 这种实 设备 中还 需要 充分 发挥 温度测控 子系统的功 能。
操 作 系 统 可 以完 成 多项 实时 性 任 务 , 而且 在 运 行 的 过程 中也 能 够 充 进行读取 , 在执行开关量任务的 时候要按照一定 的程序进行 , 然后 分 体现一 些常用系统的设计思想 。 相对于L i n u x  ̄供的一些无 时性 等任务就绪后再读取 ; 直流电动机调速任务的完成是一个 比较复杂
工业实 时测控 系统在 发展 的过 程中需要开发一些软件作为系 的操 作原 理 , 从而为系统运 用于 不同的程序奠定理论基 础。 统检测 的平台, P C 作为一种硬件平台在开发测控 系统的时候 发挥 了
基于RTLinux的全软件数控系统

基于RTLinux的全软件数控系统朱达宇;李彦;吉华;王强;李翔龙【期刊名称】《计算机集成制造系统》【年(卷),期】2004(10)12【摘要】分析了目前全软件数控系统的特点,给出了一种在Linux平台上采用RTLinux实时扩展来构建全软件数控系统的方案.该方案将整个软数控系统分为界面层、管理层和控制层,分别处理数控系统的图形界面、非实时任务和实时任务.其中,控制层作为软数控系统的核心,由软计算机数字控制模块和软可编程的逻辑控制模块组成,分别完成对机床进给轴的伺服控制以及对机床辅助机构的逻辑控制;控制层采用RTLinux内核实时线程处理多个实时任务,并采用实时管道作为数据缓冲区.利用RTLinux的高精度定时周期以及合理的实时缓冲区管理,保证了系统的实时性.【总页数】6页(P1571-1576)【作者】朱达宇;李彦;吉华;王强;李翔龙【作者单位】四川大学,制造科学与工程学院现代设计与制造研究中心,四川,成都,610065;四川大学,制造科学与工程学院现代设计与制造研究中心,四川,成都,610065;四川大学,制造科学与工程学院现代设计与制造研究中心,四川,成都,610065;四川大学,制造科学与工程学院现代设计与制造研究中心,四川,成都,610065;四川大学,制造科学与工程学院现代设计与制造研究中心,四川,成都,610065【正文语种】中文【中图分类】TP273【相关文献】1.基于ServoWorks的全软件四轴联动电火花加工数控系统研究与开发 [J], 张亚强;毕俊喜;薛志安;刘斌2.基于RTLinux的实时全软件数控系统的设计与实现 [J], 李琳3.基于Windows的全软件数控系统体系结构研究 [J], 雷立群;王戬4.基于PC的全软件数控系统结构设计 [J], 雷立群;王戬5.基于RTLinux的全软件并联机床数控系统研究 [J], 王辉;倪雁冰;杨亚威因版权原因,仅展示原文概要,查看原文内容请购买。
基于LINUX+RTLINUX平台的开放式数控系统的设计
1
(CNC)的飞速发展而逐渐成为现代机床控制领域的 新方向,其体系结构的标准化、柔性化、功能模块化 以及超强的可扩展性和移植性,特别是它能够通过 现场总线将单个设备连接,实现控制的网络化和集 成化,这是传统的体系结构所无法比拟的。在软件 应用平台开发上也具有更加宽广的空间,能满足不 同用户对其二次开发的不同需求。 在开放式数控系统中主要有两大功能模块:运 动控制模块和伺服控制模块。运动控制模块主要实 现位置环的控制;伺服控制模块主要实现速度环和 电流环的控制。运动控制模块通过特定的控制算法 将机床位置参数转化成速度指令,传递给伺服控制 模块,后者将传来的速度指令和速度反馈值比较,其 偏差作为速度控制器收入,其输出为转矩给定,并和 电流环的反馈值比较,经转矩/电流变换后得到转矩 电流给定,从而完成一次完整的三环闭环控制。电
中图分类号:THl6;TG65
策1,姜凌羽2
1
16001;2.北京航空航天大学机械工程及自动化学
文献标识码:A
and PCI Bus
Design of Open CNC Based Linux+RTLinux Operating System PAN Cel,JIANG Ling—yu2
(1.DaLian Golden
任何时候都可以使用命令来lsmod查看目前已经加 载的模块以及正在使用该模块的用户数。 3.2应用程序的编写 上层应用程序模块主要包括:人机接口模块、解 释程序模块、PLC接口模块、插补模块、运动算法模 块五大部分,通过将输入指令逐步分解、传达至运动 控制器,实现对机床的准确控制,由于软件采用了模 块化,同时基于组件技术,所以进行软件升级以及用 户进行二次开发都比较方便H1
在Linux下,驱动程序处于“核心态”,所有的硬
基于RTLinux_Linux的双机热备计算机联锁控制系统研究与实现

文章编号:1000–8829(2005)06–0033–05基于RTLinux/Linux的双机热备计算机联锁控制系统研究与实现Design and Development of a Interlocking Control System of Fault-Tolerant Computer Based on RTLinux/Linux(兰州交通大学信息与电气工程学院,甘肃兰州 730070)郑丽英,董昱,李敬文摘要:介绍了基于RTLinux的容错计算机联锁控制系统的软硬件体系结构,分析了其构成和特性,讨论了系统实现的关键技术。
关键词:铁路信号;RTLinux/Linux;计算机联锁;容错;实时中图分类号:U284文献标识码:AAbstract: The design and implementation of a inter- locking control system of the fault-tolerant computer based on RTLinux/Linux are introduced. The structure and characteristics of the system are analysed. The key techniques in developing system are discussed.Key words: railway signal;RTLinix/Linux;computer interlocking;fault-tolerant;real-time计算机联锁控制系统可以提高车站行车作业的安全和效率,是车站信号设备控制系统的发展方向,因此,选择可行的和具有良好性能价格比的接点结构,是实现铁路现代化的重要基础之一。
目前推广使用的计算机联锁采用了先进的计算机技术和通信技术,不再是一个单纯的车站信号联锁系统,而是行车指挥控制自动化系统的一个重要组成部分,是具有多种功能和安全保证的指挥系统。
基于RTLinux的嵌入式软PLC研究与开发

南京航空航天大学硕士学位论文基于RTLinux的嵌入式软PLC研究与开发姓名:张少坤申请学位级别:硕士专业:机械电子工程指导教师:游有鹏20090101南京航空航天大学硕士学位论文摘要嵌入式系统具有功耗小、成本低、可靠性高等优点,广泛应用于工业控制等诸多领域。
软PLC是目前工业自动化领域新兴的一种基于PC的软件化PLC控制技术,具有开放性好、性价比高等优势。
嵌入式软PLC同时兼顾了嵌入式系统和软PLC的优点,可以灵活地运行于嵌入式平台,便于与嵌入式数控系统实现无缝集成。
本文研究开发了一种基于PC104和RTLinux平台的嵌入式软PLC。
论文在分析传统PLC的硬件组成和工作原理基础上,提出了嵌入式软PLC的总体结构,着重对系统的四个模块即编辑模块、编译模块、执行模块和监控模块进行了研究与开发。
通过对PLC梯形图编程语言的分析,提出了的一种的树形结构来表示梯形图,方便地实现了梯形图编辑和梯形图向指令表转换等功能,其中的树形结构采用组合模式组织,不仅提高了开发的效率,而且增强了软件的健壮性。
在全面分析PLC指令表的词法和语法规则基础上,通过反复摸索,将编译工具Lex&Yacc 引入PLC指令表编译器,不仅方便实现了对指令表程序的词法、语法和逻辑错误的检查,而且有效提高了编译器的可靠性和可维护性。
运用解释执行方法,并结合实时线程实现了解释执行模块。
为便于用户调试,开发了监控模块,可以I/O监控和梯形图监控两种方式,显示PLC的运行状态。
调试和初步实验结果表明,该系统可较好地实现常规PLC顺序控制功能,达到了设计要求。
关键词:嵌入式软PLC,梯形图,指令表,组合模式,Lex&Yacc,RTLinuxiABSTRACTEmbedded systems with the advantages of low power, low cost, high reliability are extensively applied to many fields such as industrial control. At present, soft PLC is a new software implementation technology of PLC based on PC in industrial automation system, which has the advantages of high opening capability, high performance-coast and so on. Embedded soft PLC systems, which possess both the advantages of embedded system and soft PLC, could run on embedded platform flexibly, and thus seamless integrated into embedded CNC system. In this paper, an embedded soft PLC is researched and developed upon the platform of PC104 and RTLinux.Based on the analysis of the hardware and principle in traditional PLC, The general structure of embedded oft PLC is proposed. Four modules of the system, editing module, compiler module, execute module and monitoring module, are emphatically researched and developed.A tree structure which can represent the ladder diagram is proposed through the analysis of PLC ladder diagram, and thus, functions such as the ladder diagram editing and the conversion from ladder diagram to instruction list can easily realized. The tree structure is organized by Composite model, by which not only the development efficiency improved, but also the software robustness enhanced.Based on the analysis of the morphology and grammar of PLC instruction list, the compile tool Lex&Yacc is introduced into the design of PLC instruction list compiler. Thus, not only errors such as lexical error, syntactic error and logic error in instruction list programs can be easily checked, but also the reliability and maintainability of compiler can be improved greatly.The execute module is realized by means of interpretive execution with real-time thread. And also, for users to debug conveniently, a monitoring module is designed which could detect and display the status of PLC in two ways: I/O monitoring and ladder diagram monitoring.Debugging and preliminary experiment results show that the embedded soft PLC can realize the desired functions of sequence control in conventional PLC.Key Words: Embedded Soft PLC, Ladder diagram, Instruction list, Composite pattern, Lex&Yacc, RTLinux图清单图1.1 数控机床组成框图 (6)图2.1 传统PLC硬件组成 (8)图2.2 处于运行状态的PLC扫描过程 (10)图2.3 嵌入式PLC硬件原理图 (11)图2.4 嵌入式软PLC软件结构图 (11)图2.5 嵌入式软PLC系统模块间数据流程 (12)图2.6RTLinux总体运行机制 (14)图3.1 典型的梯形图程序 (17)图3.2 元件 (18)图3.3 与逻辑块 (18)图3.4 或逻辑块 (18)图3.5 分支与分支线 (18)图3.6 组合模式结构图 (19)图3.7 采用了组合模式的类图 (22)图3.8 由递归组合的LadderElement对象组成的树形结构 (22)图3.9 插入水平连线 (24)图3.10 换行显示 (24)图3.11 梯形图编辑界面 (25)图3.12 分支线长度的计算 (28)图3.13 局部绘图 (29)图3.14 插入元件 (30)图3.15 插入分支前的梯形图及其数据结构 (31)图3.16 插入分支后的梯形图及其数据结构 (31)图3.17 删除分支 (32)图4.1 编译程序的逻辑结构 (36)图4.2 自底向上语法分析器的体系结构 (40)图4.3Lex工作示意图 (41)图4.4Yacc工作示意图 (42)图4.5Lex&Yacc工作示意图 (43)南京航空航天大学硕士学位论文图4.6 指令表编辑器界面 (53)图5.1PLC对输入/输出的处理规则 (54)图5.2 循环扫描过程 (55)图5.3I/O映像区的建立 (56)图5.4I/O监控界面 (62)图5.5 梯形图监控界面 (62)vii基于RTLinux的嵌入式软PLC研究与开发表清单表3.1 梯形图各元素定义 (21)表4.1 符号标记 (44)表4.2 基本逻辑指令编码 (48)表4.3 元件类型编码 (49)承诺书本人郑重声明:所呈交的学位论文,是本人在导师指导下,独立进行研究工作所取得的成果。
基于RT-Linux的嵌入式PLC设计及实现
基于RT-Linux的嵌入式PLC设计及实现
引言在数控机床中, 通常用可编程控制器( PLC) 对机床开关量信号进行控制。
PLC 可靠性高, 使用方便。
但在大多数数控机床, 特别是经济型数控机床中, 要求的输入输出点数并不多, 通常在60 点以下,因此, 为了降低数控机床成本, 在基于工业PC 机的数控系统中, 可以采用开关量I/O 板加外接继电器,配合主机的软件对机床开关进行控制。
但如果PC 机采用单任务操作系统(如DOS) , 数控系统的所有任务运行都置于一个总体的消息循环中, 软件的模块化和可维护性较差, 系统故障的风险相对集中, 而且不能充分利用PC 机系统资源。
而采用非实时多任务操作系统(如Windows) 时, Win32 API 的设计没有考虑到实时环境的开发用途, 其系统调用的效率不高,不能满足数控系统PLC 控制的实时性要求。
为此, 本文提出一种基于RT - Linux 操作系统的嵌入式PLC, 利用RT - Linux 的开放性、模块化和可扩展性的系统结构特性和多线程/多任务的系统环境,在保证实时性的同时, 使故障风险相对分散。
数控系统嵌入式PLC 的硬件结构
数控系统硬件建立在通用工业PC 的开放体系之上, 数控系统嵌入式PLC 硬件包括: 工控机及其外围设备, 基于ISA 总线的开关量输入输出接口卡, 光电隔离模块, 继电器输出模块。
其结构如图1 所示。
工控机采用RedHatLinux810 + RTLinux311 操作系统, 数控系统的人机界面、数控代码处理、轨迹规划、参数管理以及PLC 控制都通过工控机由软件来实现, 不需要独立的PLC 控制器, 减少了数控系统对硬件的依赖, 有利于提高系统的开放性。
基于RTLinux的嵌入式实时操作系统的研究和实现

基于RTLinux的嵌入式实时操作系统的研究和实现
刘辉;郑红;李子鹏
【期刊名称】《自动化与仪器仪表》
【年(卷),期】2004()1
【摘要】分析了利用RTLinux内核实现嵌入式实时微操作系统的原理,介绍了支持WEB服务器和MySQL数据库的实时微型操作系统的实现方法,并给出了实时微系统任务调度测试程序及测试结果。
【总页数】4页(P11-14)
【关键词】RTLinux;实时操作系统;WEB服务器;MySQL数据库
【作者】刘辉;郑红;李子鹏
【作者单位】北京航空航天大学电工电子中心
【正文语种】中文
【中图分类】TP316.2
【相关文献】
1.基于RTEMS嵌入式实时操作系统实现零星服务器调度的方法 [J], 杨弋
2.基于实时操作系统的嵌入式软PLC运行系统的研究和实现 [J], 马琰
3.一种基于RTLinux实时操作系统的自适应预测控制的实现方法 [J], 程宏亮;张国贤;包海昆
4.基于嵌入式实时操作系统μC/OS-II开发嵌入式应用的研究 [J], 吴宇锦;杨根兴
5.基于嵌入式实时操作系统的加密Micro SD卡COS设计与实现 [J], 张锋;朱振荣
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键词 : T iu R Ln x操 作 系统 ; 时性 ; 台 实 转 中图分 类号 : P 9 T 3 文献 标识 码 : A 文章编 号 :0 2— 2 9 2 0 ) 1— 0 3— 3 10 2 7 (0 8 0 0 9 0
队列 被 视 为 字 符 设 备 , 多 可 达 10个 , 名 为/ 最 5 命
d v f /d v rf … … /d v rf e /r 0、 e / tl、 e/t 63。
的主控 装 置 , 来 控制 转 台 台体 运动 , 源系统 是作 用 能
2 转 台控 制 系统 组 成
采 用 的转 台 为单 轴 仿 真 转 台 , 要有 三 个部 分 主 组成 : 台体 、 控制 柜 与能 源 系 统 , 中控 制 柜是 转 台 其
为 了实 现实 时 进 程 与 非 实 时进 程 之 间 的通 讯 ,
R Ln x 供 了 FF 队列 和共 享 内存 。其 中 FF T iu 提 IO IO
Ab t a t T i p p rd s r e h a d r n ot r fa sn l s r c : h s a e e c i st e h r wae a d s f e o i g e—a i smu a in tb e a d t e b wa xs i l t a l n h o
维普资讯
第 1期
20 0 8年 2月
微
处
理
机
NO 1 .
MI CRO0
基 于 R Ln x的转 台控 制 系统 研 究 T iu
滕 国霖
( 南京 航 空航天 大 学 自动化 学院 , 南京 2 0 1 ) 106
摘 要 : 系统 结构 , 从 硬件 , 件 方面 详 细论 述 了基 于 R Ln x的S 业 控 制 系统 单轴 转 台实 时 软 T iu - 控制 软件 的实现 , 且 以 R d a . 并 e H t 0+R Ln x平 台在保 证 转 台控 制 系统性 能 的前提 下 开发 出 了转 9 T iu
t e r fRTLi x An lo e lz o to r g a u d r RTLi u 3 h oyo nu . d as r aie a c n rl p o r m n e n x .2 一 r 1+ Re c dHa 0 o h t9. n te tb e wi e trp roma c . e a s e e o te s rg a hi n e fc y e ly n n x a l t a b te e r n e W lo d v lp a betr u e r p c it ra e b mp o i g Li u . h f Ke r y wo ds: RTL nu i x OS; a i Re ltme; i lto a l S mu ai n tb e
fk… Pr, c e
R Ln x程序 运 行 于 两 个 空 间 : 核 空 间 和用 T iu 内 户空 间 , 分别用 于实 时性 程序 与非 实时性 程 序 , 些 这 可 以通过 R Ln x提 供 的 A I函数 来 实 现 。 同 时 , T iu P
图 l R L n x结 构 iu F
执行 。
普 通 的 x6机 子 上 , 最 大 中断 延迟 时 间( 处理器 8 其 从
接 收到 硬件 中断 信 号到 中断处理 子程 序开 始运行 的 时间 ) 隔不 超 过 1 间 5微 秒 , 大 任 务 切换 延迟 ( 最 从 调 度器 开始 运行 到 任务 被启 动 的时 间 ) 间隔小 于 3 5 微秒 , 当然 这些 性 能参 数也 受 限于硬 件 条件 。
1 R Ln x简 介 T iu
R Ln x T iu 最早 是 美 国新 墨 西 哥 理 工学 院 的一 个 研究 项 目, 是世 界上 最早 的实 时 Ln x系统 , 设计 iu 在 和实现 时力 图遵 循 P SX10 . 3标 准 。 到 目前 为 O I 031 止 , T i x已经 被应 用 到广 泛 的领域 中。 R Ln u R Ln x 没有 对 Ln x内核作 很 大 的改 动 , T iu 并 iu 而 是 利用 Ln x模 块 机 制 , 用 插 人 模 块 的 方 式 , iu 采 在 Ln x内核和 硬 件 之 间增 加 了 一 个 虚 拟 层 ( 称 虚 iu 俗 拟机 ) 构 筑 了一 个 小 而 简单 的实 时 内核 , 过 这 个 , 通 独 立的 实时 内核来 管理 实 时任 务 ( 图 1 。 在加 载 见 ) 了 R Ln x , 来 的 Ln x内 核就 作 为 实 时操 作 T iu 后 原 i u 系统 的一 个空 闲任 务 , 当没 有 实 时任 务 运 行 时才 仅
Re e c fRTLn x— b s d Co to y t m s rh o iu — a e n r l s e S
TENG O— ln GU i
( o eeo u m t nE gne n , af g U i rt o A rn ui n s o ui , af g2 0 1 ,hn ) C lg l fA t ai n i r g N nn n e i e a ts dA t n tsN n n 10 6 C i o o ei i v syf o ca ra c i a