Cui bono robo sapiens
旅游葡萄牙语口语900句
旅游葡萄牙语口语900句1. 问候和寒暄1. 你好!(Olá!)2. 早上好!(Bom dia!)3. 下午好!(Boa tarde!)4. 晚上好!(Boa noite!)6. 很高兴见到你!(Prazer em conhecê-lo!)8. 我叫{your name}。
(Meu nome é {your name}.)9. 你来自哪里?(De onde você é?)10. 我来自{your country}。
(Eu sou de {your country}.)2. 询问信息11. 请问,这里附近有餐馆吗?(Por favor, há algum restaurante nas proximidades?)12. 请问,附近有银行吗?(Por favor, há algum banco nas proximidades?)14. 这里附近有观光点吗?(Há algum ponto turístico por aqui?)16. 请问,这里附近有出租车吗?(Há táxis por aqui?)17. 请问,这里附近有医院吗?(Há algum hospital por aqui?)18. 请问,这个地方安全吗?(Este lugar é seguro?)19. 请问,你知道葡萄牙有什么特色吗?(Você conhece alguma característica de Portugal?)20. 请问,这里附近有超市吗?(Há algum supermercado por aqui?)3. 餐厅和食物21. 请给我一份菜单。
(Por favor, me dê um cardápio.)22. 今天的特色菜是什么?(Qual é o prato do dia?)23. 我想要一份{dish}。
SharePoint Online 基础指南说明书

Guida introduttivaSe si vuole usufruire di una posizione sicura in cui condividere e archiviare i file ovunque ci si trovi, accedere al proprio abbonamento a Office 365 e selezionareSharePoint nell'icona di avvio delle app.Scoprire i contenuti in primo piano •Notizie dai siti mette in evidenza gliaggiornamenti dei siti seguiti o visitati spesso.•Siti frequenti mostra i siti a cui siaccede più spesso e le attività recenti al loro interno.•Siti suggeriti*(non visualizzato)cambia in base alle ricerche eseguite e ai suggerimenti di Microsoft Graph.•Microsoft Graph deve essereabilitato dall'amministratore affinché sia possibile visualizzareCollegamenti in primo piano eSiti suggeriti nella home page di SharePoint.Trovare i siti•Seguiti mostra tutti i siti seguitidall'utente, ad esempio il sito delteam o un sito di un altro gruppo con cui si collabora.•Recenti mostra i siti visitati direcente.•Collegamenti in primo piano*mostra i siti che l'azienda vuole mettere in evidenza.CercaConsente di eseguire ricerche per Siti , Persone o File .Creare un sito o un post di notizieUsare i fileSelezionare un sito nella home page di SharePoint o immettere il relativo URL nel browser. Quindi selezionare Documenti nel riquadro di spostamento sinistro.ApriAprire e modificare un file online o in un'app desktop.Stato condivisione Vedere quali file sono condivisi e con chi.Cronologia versioniVisualizzare la cronologia delle versioni di un file e ripristinare una versione precedente di un file.CondividiCondividere filedirettamente da SharePoint. I file rimangono privati finché non li si condivide.Copia collegamentoOttenere un collegamento al file selezionato da inserire in un messaggio istantaneo o di posta elettronica o in un sito.Sposta in/Copia inSpostare o copiare un file in un'altra destinazione nel proprio OneDrive o inqualsiasi sito di SharePoint.Riquadro dettagliVisualizzare le informazioni sui file e le attività recenti, gestire le autorizzazioni di accesso e modificare le proprietà dei file.Attività recentiVisualizzare le attività di condivisione, visualizzazione e modifica di un file.DocumentoVisualizzare e modificare i file archiviati in un sito di SharePoint.Aggiungi in altoAggiungere cartelle o documenti importanti all'inizio dell'elenco per visualizzarli facilmente.FlowAutomatizzare le attività comuni tra SharePoint e altri servizi di Office 365 e di terze parti.ScaricaScaricare una copia di un file per lavorarci offline occupando spazio sul dispositivo locale.Creare o caricare file e cartelle È possibile creare nuovi file e cartelle e caricare file e cartelle esistenti dal dispositivo in uso. In SharePoint selezionare Carica >File . Oppure selezionare una posizione inSharePoint e trascinarvi file o cartelle dal dispositivo.Copia collegamentoÈ possibile condividere un file anche copiando il collegamento e incollandolo in unmessaggio di posta elettronica, un messaggio istantaneo, una pagina Web o una pagina di OneNote. In SharePoint selezionare un file e quindi scegliere Copia collegamento . Copiareil collegamento e quindi incollarlo nella destinazione.Sincronizzare file e cartelle di SharePoint con OneDriveSincronizzare i file e le cartelle in SharePoint con il computer, in modo da potervi accedere anche quando si è offline. In una raccolta documenti nel sito di SharePoint da cui si vogliono sincronizzare i file selezionare Sincronizza e accedere con il proprio account aziendale o dell'istituto di istruzione.Condividere fileSelezionare un file e quindi scegliere Condividi . È possibile concedere ai destinatari le autorizzazioni di modifica o visualizzazione e impostare limiti di tempo su un file perspecificare quando non sarà più accessibile.In base alle impostazioni dell'amministratore,i tre livelli di condivisione disponibili sono:Tutti -le persone interne ed esterne all'organizzazione possono accedere.Collegamenti ricevuti direttamente o inoltrati.Persone di <nome organizzazione>-tutte le persone interne all'organizzazione possono accedere.Persone specifiche -specificare gli indirizzi di posta elettronica delle persone a cui si vuole concedere l'accesso.Creare un sitoSelezionare + Crea sito nella home page di SharePoint per creare un nuovo sito diSharePoint. Selezionare un sito del team o di comunicazione e immettere un titolo, una descrizione, i proprietari e i membri. È anche possibile impostare il gruppo comeprivato e cambiare il nome di posta elettronica del gruppo. Se si seleziona un sito del team, viene creato anche un gruppo di Office 365.Aggiungere una paginaSelezionare + Nuovo > Pagina nel nuovo sito, assegnare un nome alla pagina e quindi selezionare Pubblica.Aggiungere una raccolta documenti o un elencoSelezionare + Nuovonel nuovo sito Web per aggiungere una raccolta o un elenco.Aggiungere web partNel post di notizie o nella pagina selezionare il segno più. È possibile aggiungere testo, immagini, file, video, contenuto dinamico e altro usando le web partcorrispondenti.Accesso a SharePoint per dispositivi mobiliL'app SharePoint per dispositivi mobili consente di accedere ai contenuti della Intranet aziendale dal telefono o dal tablet ed è disponibile nell'app store per iOS, Android e Windows. È possibile cercare siti, persone e file, esplorare i contenuti di SharePoint, mantenersi aggiornati sulle ultime notizie, visualizzare i propri contenuti e altro ancora.Le schermate riportate sopra rappresentano account di SharePoint in iOS. Per gli utenti di Android le schermate saranno analoghead eccezione delle funzionalità relative alle attività.Usare la casella di ricerca per trovare contenuti importanti.Toccare un utente per aprire la sua scheda contatto e vedere con chi lavora e a cosa sta lavorando.Accedere alla visualizzazionepersonalizzata dei siti del team, i siti dicomunicazione e i post di notizie.Esplorare siti, file, persone e altro per tornare a ciò a cui si stava lavorando.Visualizzare i post di notizie ovunque e condividere aggiornamenti, report, il proprio stato e le proprie esperienze con il team.File su richiestaFile su richiesta consente di accedere a tutti i file di SharePoint tramite OneDrive senza doverli scaricare tutti e usare spazio di archiviazione nel computer.Nella barra delleapplicazioni selezionare l'icona di OneDrive e quindi selezionare Altro >Impostazioni .Nella scheda Impostazioni selezionare la casella Risparmia spazio e scarica i file quando li usi .Approfondimenti su SharePointTrovare assistenzaEsplorare la Guida e le risorse di formazione per SharePoint e altre app di Office.Per altre informazioni, visitare https:///fwlink/?linkid=871131.Risorse di formazione, esercitazioni e video gratuiti su OfficePronti per approfondire le funzionalità messe a disposizione da SharePoint?Visitare https:///fwlink/?linkid=871134 ed esplorare le risorse di formazione gratuite.Ottenere l'app SharePoint per dispositivi mobiliScaricare l'app per dispositivi mobili per accedere ai contenuti della Intranet dal telefono o dal tablet.Visitare https://aka.ms/getspmobile .Selezionare i file e le cartelle da sincronizzareÈpossibile scegliere le cartelle e i file da sincronizzare con il computer. Nella barra delle applicazioni selezionare l'icona di OneDrive e quindi selezionare Altro >Impostazioni >Scegli cartelle.File e cartelle online per risparmiarespazio nel computer.Facendo doppio clic sull'icona della nuvola, i file e le cartelle possono essere resi disponibili nel computer.Rendere file e cartelle accessibili senza una connessione Internet.Riportare online i file e le cartelle.Altre guide introduttivePer scaricare le Guide introduttive gratuite di altre app di Office, visitare https:///fwlink/?linkid=2008317.。
OSS24智能自适应低压24V墙上开关说明书
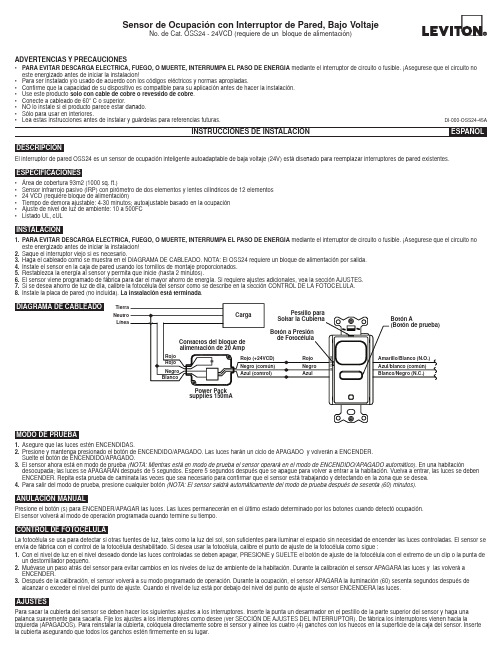
ADVERTENCIAS Y PRECAUCIONES• PARA EVITAR DESCARGA ELECTRICA, FUEGO, O MUERTE, INTERRUMPA EL PASO DE ENERGIA mediante el interruptor de circuito o fusible. ¡Asegurese que el circuito no este energizado antes de iniciar la instalacion!• Para ser instalado y/o usado de acuerdo con los códigos eléctricos y normas apropiadas.• Confirme que la capacidad de su dispositivo es compatible para su aplicación antes de hacer la instalación.• Use este producto solo con cable de cobre o revestido de cobre .• Conecte a cableado de 60° C o superior.• NO lo instale si el producto parece estar dañado.• Sólo para usar en interiores.• Lea estas instrucciones antes de instalar y guárdelas para referencias futuras.El interruptor de pared OSS24 es un sensor de ocupación inteligente autoadaptable de baja voltaje (24V) está diseñado para reemplazar interruptores de pared existentes.DESCRIPCIÓN• Área de cobertura 93m2 (1000 sq. ft.)• Sensor infrarrojo pasivo (IRP) con pirómetro de dos elementos y lentes cilíndricos de 12 elementos • 24 VCD (requiere bloque de alimentación)• Tiempo de demora ajustable: 4-30 minutos; autoajustable basado en la ocupación • Ajuste de nivel de luz de ambiente: 10 a 500FC •Listado UL, cULESPECIFICACIONESINSTALACIÓN1. PARA EVITAR DESCARGA ELECTRICA, FUEGO, O MUERTE, INTERRUMPA EL PASO DE ENERGIA mediante el interruptor de circuito o fusible. ¡Asegurese que el circuito no este energizado antes de iniciar la instalacion!2. Saque el interruptor viejo si es necesario.3. Haga el cableado como se muestra en el DIAGRAMA DE CABLEADO. NOTA: El OSS24 requiere un bloque de alimentación por salida.4. Instale el sensor en la caja de pared usando los tornillos de montaje proporcionados.5. Restablezca la energía al sensor y permita que inicie (hasta 2 minutos).6. El sensor viene programado de fábrica para dar el mayor ahorro de energía. Si requiere ajustes adicionales, vea la sección AJUSTES.7. Si se desea ahorro de luz de día, calibre la fotocélula del sensor como se describe en la sección CONTROL DE LA FOTOCELULA.8. Instale la placa de pared (no incluida). La instalación está terminada .MODO DE PRUEBA1. Asegure que las luces estén ENCENDIDAS.2. Presione y mantenga presionado el botón de ENCENDIDO/APAGADO. Las luces harán un ciclo de APAGADO y volverán a ENCENDER. Suelte el botón de ENCENDIDO/APAGADO.3. El sensor ahora está en modo de prueba (NOTA: Mientras está en modo de prueba el sensor operará en el modo de ENCENDIDO/APAGADO automático). En una habitacióndesocupada; las luces se APAGARÁN después de 5 segundos. Espere 5 segundos después que se apague para volver a entrar a la habitación. Vuelva a entrar, las luces se deben ENCENDER. Repita esta prueba de caminata las veces que sea necesario para confirmar que el sensor está trabajando y detectando en la zona que se desea. 4. Para salir del modo de prueba, presione cualquier botón (NOTA: El sensor saldrá automáticamente del modo de prueba después de sesenta (60) minutos).ANULACIÓN MANUALPresione el botón (s) para ENCENDER/APAGAR las luces. Las luces permanecerán en el último estado determinado por los botones cuando detectó ocupación.El sensor volverá al modo de operación programada cuando termine su tiempo.AJUSTESPara sacar la cubierta del sensor se deben hacer los siguientes ajustes a los interruptores. Inserte la punta un desarmador en el pestillo de la parte superior del sensor y haga una palanca suavemente para sacarla. Fije los ajustes a los interruptores como desee (ver SECCIÓN DE AJUSTES DEL INTERRUPTOR). De fábrica los interruptores vienen hacia laizquierda (APAGADOS). Para reinstalar la cubierta, colóquela directamente sobre el sensor y alinee los cuatro (4) ganchos con los huecos en la superficie de la caja del sensor. Inserte la cubierta asegurando que todos los ganchos estén firmemente en su lugar.CONTROL DE FOTOCÉLULALa fotocélula se usa para detectar si otras fuentes de luz, tales como la luz del sol, son suficientes para iluminar el espacio sin necesidad de encender las luces controladas. El sensor se envía de fábrica con el control de la fotocélula deshabilitado. Si desea usar la fotocélula, calibre el punto de ajuste de la fotocélula como sigue :1. Con el nivel de luz en el nivel deseado donde las luces controladas se deben apagar, PRESIONE y SUELTE el botón de ajuste de la fotocélula con el extremo de un clip o la punta de un destornillador pequeño.2. Muévase un paso atrás del sensor para evitar cambios en los niveles de luz de ambiente de la habitación. Durante la calibración el sensor APAGARA las luces y las volverá a ENCENDER.3. Después de la calibración, el sensor volverá a su modo programado de operación. Durante la ocupación, el sensor APAGARA la iluminación (60) sesenta segundos después de alcanzar o exceder el nivel del punto de ajuste. Cuando el nivel de luz está por debajo del nivel del punto de ajuste el sensor ENCENDERA las luces.DI-000-OSS24-45ASensor de Ocupación con Interruptor de Pared, Bajo VoltajeNo. de Cat. OSS24 - 24VCD (requiere de un bloque de alimentación)DIAGRAMA DE CABLEADOOperación del Sensor Interruptor 1 - Relevador 1Programa el sensor para ENCENDIDO manual/APAGADO automático o ENCENDIDO/APAGADO automático. Cuando se establece el modo de ENCENDIDO manual/APAGADO automático las luces se ENCIENDEN manualmente presionando el botón de ENCENDIDO/APAGADO. Cuando el tiempo del sensor termina y APAGA las luces en el modo de ENCENDIDO manual/APAGADO automático mientras el espacio sigue ocupado, cualquier movimiento detectado dentro de los treinta (30) segundos ENCENDERA las luces de nuevo automáticamente, sin que el usuario tenga que presionar el botón de ENCENDIDO.Interruptor 2 - NOTA: El interruptor 2 no tiene función en los modelos de relevador sencillo.Interruptor 3 - Cronómetro Adaptador o FijoControla la selección entre el modo de cronómetro adaptador o fijo. En el modo de cronómetro adaptador, el sensor autoajusta automáticamente el tiempo de demora para mejorar el ahorro de energía. El sensor inicializará su valor de cronómetro a ocho (8) minutos. Si el cronómetro del Banco B selecciona 0 y el cronómetro selecciona 1 los interruptores han sidofijados a cuatro (4) minutos, éste será el valor más pequeño usado por el cronómetro. En modo de cronómetro fijo, las funciones del cronómetro de autoadaptación de los sensores están desactivadas y el tiempo de demora del sensor se ajusta de acuerdo con la selección 0 del Banco B y los ajustes de selección 1 del cronómetro del interruptor.Interruptor 4 - Reinicio del AdaptadorEl sensor está equipado con tecnología de autoadaptación que ajusta la sensibilidad del sensor y los ajustes del cronómetro automáticamente para mejorar el rendimiento basado en los patrones de ocupación. El sensor aprende constantemente y se ajusta apropiadamente. Si los ajustes aprendidos necesitan ser reiniciados (por ejemplo, si instala el sensor a otra área), cambie el interruptor de ENCENDIDO a APAGADO. El cronómetro adaptador se reinicia de acuerdo con la selección 0 del cronómetro del banco B y la selección 1 del cronómetro de los interruptores. La sensibilidad de adaptación se reinicia a los valores de fábrica. Los ajustes del sensor de la fotocélula también se reinician a los valores de fábrica (desactivados) de forma que el sensor encenderá la luz (s) en respuesta a la ocupación independientemente de los niveles de luz ambiental en el espacio iluminado (NOTA: el reinicio de adaptación también se puede lograr presionando y sosteniendo el botón de ajuste de la fotocélula por diez (10) segundos).Interruptor 5 - Relevador de DerivaciónSi necesita dar servicio a los circuitos controlados sin desenergizarlos del panel interruptor (NOTA: esto no se recomienda como un procedimiento estándar), lleve a cabo los siguientes pasos:1. Con las luces ENCENDIDAS, fije el interruptor del relevador de derivación a la posición ENCENDIDO.2. Presione el botón (s) para APAGAR las luces.3. Presione el botón (s) de nuevo para verificar la anulación (luces no deben ENCENDER de nuevo).EL interruptor del relevador de derivación no interrumpirá la operación del sensor, previniendo que la salida(s) se ENCIENDA de nuevo, independientemente de las condiciones deocupación o del botón a presión. Para que el sensor regrese a su operación normal, el interruptor del relevador de derivación debe estar en la posición APAGADO. Para confirmar el sensor está operando normalmente, las luces se deben ENCENDER y APAGAR cuando se presiona el botón(s).Interruptores 1 y 2 - Ajustes del CronómetroEstablece el período de tiempo que las luces permanecerán ENCENDIDAS después que se detecte el último movimiento. El tiempo de demora se puede ajustar a 4, 8, 16 o 30 minutos.Para información adicional ver Banco A - Interruptor 3 - Sección del Cronómetro adaptador o fijo .Interruptor 3 y 4 – Habilita y Deshabilita la Tecnología de SensibilidadActiva o desactiva las tecnologías de detección de ocupación utilizados por el sensor. Si todas las tecnologías de detección están desactivadas, el sensor funciona como un interruptor manual de ENCENDIDO/APAGADO.Interruptor 5 – SensibilidadFija el nivel de sensibilidad inicial infrarroja pasiva (IRP) del sensor. La sensibilidad se puede ajustar alta o baja.* Sólo funciona en los modelos de tecnología múltiple.DI-000-OSS24-45A© 2016 Leviton Mfg. Co., Inc.Para Asistencia Técnica llame al: 1-800-824-3005 (Sólo en EE.UU.) GARANTÍA LIMITADA POR CINCO AÑOS Y EXCLUSIONESL eviton garantiza al consumidor original de sus productos y no para beneficio de nadie más que este producto en el momento de su venta por Leviton está libre de defectos en materiales o fabricación por un período de cinco años desde la fecha de la compra original. La única obligación de Leviton es corregir tales defectos ya sea con reparación o reemplazo, como opción. Para detalles visite o llame al 1-800-824-3005. Esta garantía excluye y renuncia toda responsabilidad de mano de obra por remover o reinstalar este producto. Esta garantía es inválida si este producto es instalado inapropiadamente o en un ambiente inadecuado, sobrecargado, mal usado, abierto, abusado o alterado en cualquier manera o no es usado bajo condiciones de operación normal, o no conforme con las etiquetas o instrucciones. No hay otras garantías implicadas de cualquier otro tipo, incluyendo mercadotecnia y propiedad para un propósito en particular pero si alguna garantía implicada se requiere por la jurisdicción pertinente, la duración de cualquiera garantía implicada, incluyendo mercadotecnia y propiedad para un propósito en particular, es limitada a cinco años. Leviton no es responsable por daños incidentales, indirectos, especiales o consecuentes, incluyendo sin limitación, daños a, o pérdida de uso de, cualquier equipo, pérdida de ventas o ganancias o retraso o falla para llevar a cabo la obligación de esta garantía. L os remedios provistos aquí son remedios exclusivos para esta garantía, ya sea basado en contrato, agravio o de otra manera.S ÓLO PARA MÉXICOPÓLIZA DE GARANTÍA: LEVITON S. de R.L. de C. V., LAGO TANA NO. 43 COL. HUICHAPAN, DEL. M. HIDALGO MÉXICO D. F., MÉXICO. CP 11290 Tel (55) 5082-1040. Garantiza este producto por el término de un año en todas sus partes y mano de obra contra cualquier defecto de fabricación y funcionamiento a partir de la fecha de entrega o instalación del producto bajo las siguientes CONDICIONES:1. Para hacer efectiva esta garantía, no podrán exigirse mayores requisitos que la presentaciónde esta póliza junto con el producto en el lugar donde fue adquirido en cualquiera de los centros de servicio que se indican a continuación.2. La empresa se compromete a reemplazar o cambiar el producto defectuoso sin ningún cargo para elconsumidor, los gastos de transportación que se deriven de su cumplimiento serán cubiertos por: LEVITON, S. de R.L. de C.V.3. El tiempo de reemplazo en ningún caso será mayor a 30 días contados a partir de la recepción del producto en cualquiera de los sitios en donde pueda hacerse efectiva la garantía.4. Cuando se requiera hacer efectiva la garantía mediante el reemplazo del producto, esto se podrá llevar a cabo en: LEVITON, S. de R.L. de C.V.5. Esta garantía no es válida en los siguientes casos: A) Cuando el producto ha sido utilizadoen condiciones distintas a las normales. B) Cuando el producto no ha sido operado de acuerdo con el instructivo de uso en idioma español proporcionado. C) Cuando el producto ha sido alterado o reparado por personas no autorizadas por LEVITON, S. de R.L. de C.V.6. El consumidor podrá solicitar que se haga efectiva la garantía ante la propia casa comercial donde adquirió el producto.7. En caso de que la presente garantía se extraviara el consumidor puede recurrir a su proveedor para que se le expida otra póliza de garantía previa presentación de la nota de compra o factura respectiva.DATOS DEL USUARIO NOMBRE: DIRECCION:COL: C.P . CIUDAD:ESTADO: TELEFONO:DATOS DE LA TIENDA O VENDEDORRAZON SOCIAL: PRODUCTO:MARCA: MODELO: NO DE SERIE:NO. DEL DISTRIBUIDOR: DIRECCION:COL: C.P . CIUDAD:ESTADO: TELEFONO:FECHA DE VENTA:FECHA DE ENTREGA O INSTALACION:。
中职英语基础模块上册unit1(完整版)

a pat on the back
a hug
拥抱:在欧美、中东及南美洲常见的礼节, 一般用于熟人和朋友之间,有时伴随着接吻礼, 是比较亲密的一种见面礼仪。这种礼仪一般用 于同性或者亲密的异性之间。
1.w_______ (欢迎) 2. v _______ (职业的) 3. g_______ (高兴的) 4. m________(遇见,汇合,迎接) 5. l______(看,瞧,看起来,显得... ) 6. c______ (教室) 7. b________ (建筑物,楼房) 8. l________ (实验室) 9. f_____(楼层,地板) 10. l________ (大的) 11. b_______ (明亮的) 12. c__(班级,课节)
❖every
❖ adj. 每一个;每个
❖love
❖ v.热爱;爱好
❖hard
❖ adv.努力地;adj.硬的;难的
❖thank
❖ v./n.感谢
thank …for… 为…而感谢…
例句:谢谢你的帮助。eg. Thank you for your help.
❖visit ❖time ❖English ❖want ❖desk ❖chair
a bow
鞠躬:日本是一个极其注重礼节的国家,见面时一般 都要互相问候,脱帽鞠躬,眼睛向下,表示诚恳的态度。 日本妇女温柔体贴,每天鞠躬无数次,对男子亦十分尊 重。除了日本之外,朝鲜人见面也行鞠躬礼。
a kiss on the cheek
接吻礼:接吻礼是西欧流行在亲人、朋友、夫妻之间的 亲昵礼节,一般只能在受礼者脸颊上轻吻一下,不能发出声 音。感情激烈时,比如说遇到喜事或丧事,也可以使用接吻 礼,表示兴奋或者安慰、同情。
Whirlpool 洗衣机用户手册说明书

E AWO/D 43115TABLA DE PROGRAMAS❉:opcional / Sí : requiere dosificación1)Para un mejor cuidado de la ropa, en este programa la velocidad de centrifugado está limitada a 400 rpm.5019 301 10258Whirlpool is a registered trademark of Whirlpool USAProgramaEtiquetas de mante-nimiento Tipo de lavado/notas- Para seleccionar la temperatura, respete las recomendaciones del fabricante quefiguran en la etiqueta de mantenimientoCarga máx.kgDetergentes y aditivos Opciones especialesVelocidad máx.centri-fugado rpmPre-lavado Lavado PrincipalSuavizante Pre-lavado Lavado en frío Anti-arrugas Centri-fugado variableAlgodón40 - 60 - 95 °C40 - 60 - 95 °CRopa de cama, mantelería, ropa interior, toallas, camisas, etc., de algodón o lino con suciedad de normal a elevada.Para ropa muy sucia también se puede seleccionar la opción adicional de “prelavado”.5,0❉Sí❉❉❉❉❉1000Sintéticos 30 - 40 - 60 °C 30 - 40 - 60 °CBlusas, camisetas, delantales etc., con un con un grado de suciedad leve o normal de poliéster (Diolen, T revira), poliamida (Perlon, Nylon) o mezclas con algodón.2,5❉Sí❉❉❉❉❉1000Delicados30 - 40 °C 30 - 40 °CCortinas y prendas delicadas, vestidos, faldas y blusas.1,5❉Sí❉❉❉—❉1000Carga diaria40 °C40 °CT extiles de algodón o fibra sintética con suciedad leve o normal.3,0—Sí❉—❉❉❉1000Lavado rápido30 °C30 °CRopa externa poco usada de algodón, poliéster, poliamida y mezclas con algodón.3,0—Sí❉—❉—❉1000LanaFrío - 40 °C- 40 °C Sólo prendas de lana sin acabado de fieltro, etiquetadas con la marca de lana y como resistentes al lavado a máquina.1,0—Sí❉—❉—❉1000Lavado a mano40 °C 40 °C T extiles de lino, seda, lana y viscosa etiquetados como “lavar a mano”.1,0—Sí❉———❉4001)Lencería 30 °C30 °CEste ciclo es especialmente adecuado para la lencería fina (se recomienda el uso de una red para lavado).1,0—Sí❉—❉—❉4001)Aclarado y centrifugado—Igual que el último aclarado y el centrifugado final del programa “Algodón”.5,0——❉———❉1000Centrifugado —Este programa incluye un centrifugado intensivo. Es el mismo que en el programa “Algodón”.5,0——————❉1000Centrifugado suave —Este programa utiliza un centrifugado suave. Es el mismo que en el programa “Lana”.1,0——————❉1000Descarga de agua—El agua se elimina sin centrifugar.—————————A.Indicación de “Puerta abierta”La lavadora posee unas funciones de seguridad automáticas gracias a las cuales reconoce e indicainmediatamente los posibles fallos y reacciona adecuadamente, p. ej.:B.Indicación de “Reparación”C.Indicación de “Grifo cerrado”D.Indicación de “Limpie la bomba”E.Selector de programasF.Botón “Inicio/Pausa”G.Selector de velocidad de centrifugadoH.Indicador de avance del programaI.Botón “Reinicio”DHC FIGEB A5019 301 10258Whirlpool is a registered trademark of Whirlpool USAAñada detergente según lo indicado en la primera página y en las instrucciones de uso. Cierre la puerta y gire el selector de programas al programa y la temperatura que desee. Destella el indicador luminoso situado junto al botón “Inicio/Pausa”.Pulse los botones de las opciones que desee. Seencienden los indicadores luminosos correspondientes.Si no es posible una combinación de programa y opciones adicionales, los indicadores luminosos se apagan automáticamente. Las combinaciones de opciones que no son posibles quedan automáticamente desactivadas.Botón “Prelavado”•Sólo para cargas de ropa muy sucia (por ejemplo con arena, suciedad gruesa). El tiempo del ciclo aumenta aproximadamente 15 minutos.Botón “Lavado en frío”•El agua sólo se calienta hasta 20 °C•Opción adecuada para ropa delicada con una temperatura máxima recomendada en la etiqueta de 30 °C.•Sólo se puede seleccionar en el paso de temperatura mínima de cada programa.Botón “Antiarrugas”•Puede utilizarse junto con los programas “Algodón”, “T ejidos sintéticos” y “Carga diaria” para facilitar el planchado.•Mejora la calidad del agua y realiza un centrifugado suave.Botón “Centrifugado variable”•Cada programa posee una velocidad máxima de centrifugado predefinida.•Pulse el botón para ajustar otra velocidad de centrifugado.•Si selecciona la velocidad de centrifugado “0” el centrifugado final se cancela pero los niveles intermedios del centrifugado continúan durante el aclarado. El agua se elimina sin centrifugar.DATOS DE CONSUMOPrograma T emperatura (°C)Carga(kg)Agua(l)Energía(kWh)Duración aprox. delprograma (horas :minutos)*Algodón 955,049**1,902:00Algodón ***605,0440,852:20Algodón 405,0440,602:00T ejidos sintéticos 602,550**0,70 1.30T ejidos sintéticos 402,5450,551:15T ejidos delicados 301,5500,500:45Prendas mixtas 403,0450,451:00Lavado rápido303,0400,400:30Lana401,0550,600:45Lavado a mano 401,0450,600:40Lencería301,0450,500:40Los datos de consumo se midieron en condiciones normalizadas de acuerdo con la norma CEI/EN 60456. Los valores de consumo en el hogar pueden variar respecto a los valores de la tabla según la presión y temperatura del agua, la carga y el tipo de lavado.*El indicador de tiempo restante puede desviarse de los valores de la tabla, porque considera las condiciones de la vivienda que corresponden en ese momento.**Para reducir la temperatura del agua, se agrega agua fría al final del ciclo principal de lavado, antes de que la bombavacíe el agua.***Programa de referencia para la etiqueta de energía.AÑADA DETERGENTE, CIERRE LA PUERTA Y SELECCIONE EL PROGRAMASELECCIONE CUALQUIER OPCIÓN Abra el grifo y pulse el botón “Inicio/Pausa”. Destella el indicador luminoso situado junto al botón“Inicio/Pausa”. El indicador de secuencia del programa muestra la fase actual del programa, de izquierda a derecha a través de Lavado, Aclarado y Centrifugado/Descarga.•Cuando termina la fase del programa, se apaga el indicador luminoso correspondiente.Antes del inicio y de la finalización de un programa, los indicadores luminosos se encienden para señalar que se puede abrir la puerta. Mientras el programa de lavado esté en marcha, la puerta permanece cerrada y por ninguna razón se debe intentar forzar su apertura. En caso de una necesidad urgente de abrirla durante un programa en marcha, consulte “Cancelación (Reinicio) de un programa antes de que termine”.“Reparación”El indicador de “Reparación” se puede encender por el fallo de un componente eléctrico. Consulte la “Guía para la solución de problemas” incluida con lasinstrucciones de uso; si el fallo continúa, póngase en contacto con el Servicio posventa.“Grifo cerrado”La lavadora no recibe alimentación de agua o es insuficiente. Abra el grifo; si la indicación sigue encendida, consulte la “Guía para la solución de problemas” incluida con las instrucciones de uso.“Limpie la bomba”La lavadora no descarga el agua. Compruebe si el tubo de descarga está doblado o si hay que limpiar el filtro; en este último caso, consulte en las instrucciones de uso (“Extracción del filtro”).•T odos los indicadores de secuencia delprograma están apagados y se enciende el indicador de “Puerta abierta”.1.Gire el selector de programas a la posición de “Apagado/O”.2.Cierre el grifo.3.Abra la puerta y retire la ropa.4.Deje la puerta entreabierta para facilitar el secadodel tambor.1.Pulse el botón “Inicio/Pausa” para detenertemporalmente el programa. El indicador destella.2.Seleccione el nuevo programa (con latemperatura), las opciones suplementarias y (si lo desea) otra velocidad de centrifugado.3.Pulse nuevamente el botón “Inicio/Pausa”. Elnuevo programa continúa el programa de lavado en la fase en que se interrumpió el anterior. En este programa no es necesario añadir más detergente.El botón “Reinicio” permite cancelar un programa antes del final.•Pulse el botón “Reinicio” durante, almenos, 3 segundos. El agua se descarga antes de poder abrir la puerta.INICIO DEL PROGRAMAINDICACIÓN DE “PUERTA ABIERTA”INDICACIONES ROJAS FIN DEL PROGRAMACAMBIO DE PROGRAMA O DE OPCIONES DESPUÉS DEL INICIO DEL PROGRAMA CANCELACIÓN (REINICIO) DE UN PROGRAMA ANTES DE QUE TERMINE。
中国菜名的英语翻译

商务英语词汇 - 中国菜名的英语翻译_外贸商务英语四级六级考研雅思英语翻译写作作文听力单词在线字典,online english chinese dictionary,spkcn中菜部头盘餐前小品Appetizers1.各式刺身拼Sashimi Platter2.锅贴Pot Sticker3.辣汁脆炸鸡腿Fried Chicken Legs (Spicy Hot)4.鸡沙律Chicken Salad5.酥炸大虾Fried Prawns6.酥炸生豪Fried Oysters7.酥炸鲜鱿Fried Squid8.海哲分蹄Smoked Jelly Fish9.五香牛展Special Beef10.白云凤爪Chicken Leg11.琥珀合桃House Special Honey Walnuts12.脆皮春卷Spring Rolls13.蜜汁叉烧B.B.Q. Pork汤羹类Soup1.花胶鲍鱼火鸭丝羹Congee Pike Maw With Roast Duck2.红烧鸡丝翅Chicken Shark's Fin Soup3.竹笙烩生翅Bamboo Shark Fin Soup4.粟米瑶柱羹Corn with Dry Scallops Soup5.竹笙海皇羹Bamboo Seafood Soup6.鸡蓉粟米羹Corn & Chicken Soup7.酸辣汤Hot & Sour Soup8.法国海鲜汤French Style Seafood Soup9.法国杂菜汤French Style Vegetable Soup10.杂锦云吞汤Combination Won Ton Soup11.芥菜肉片咸蛋汤Mustard Green Salted Egg Soup12.火鸭咸蛋芥菜汤Roast Duck Salt Egg / Mustard Green13.西葫牛肉羹West Lake Beef Soup14.三丝烩鱼肚Fish Soup15.蝴蝶海参羹Sea Cucumber Soup16.四宝豆腐羹Steam Tofu Soup龙虾蟹类Seafood (Lobster, Shrimp, Crab)1.法式咖喱焗龙虾French Curry Lobster2.法式芝士牛油焗龙虾Cheese Lobster3.上汤焗龙虾Special Style Lobster4.蒜茸蒸龙虾Garlic Style Lobster5.豉椒炒肉蟹Crab6.上汤姜葱焗蟹Green Onion Crab7.椒盐蟹Spicy Salt Crab8.粉丝咖喱蟹煲Rice Noodle Curry Crab虾鲜鱿贝类Seafood1.菜远虾球Shrimp with Tender Green2.白灼中虾Boil Shrimp3.点桃虾球Walnut Shrimp4.油泡虾球Crystal Prawn5.柠檬虾球Lemon Prawn6.咕噜虾Sweet & Sour Prawn7.蒜茸蒸虾Steam Prawn w/ Garlic Sauce8.四川虾球Szechuan Shrimp9.豆瓣酱鲜鱿Fresh Squid10.虾龙糊Shrimp w/ Lobster Sauce11.韭王象拔蚌Gold Chive Geoduck12.韭王花枝片Gold Chive Squid13.椒盐鲜鱿Pepper Salt Fresh Squid14.豉汁炒三鲜Mixed Seafood w/ Black Bean Sauce15.马拉盏炒鲜鱿Special Fresh Squid16.碧绿炒带子Tender Green Scallop17.双菇鲜带子Mushroom Fresh Scallop18.豉汁炒大蚬Clam w/ Black Bean Sauce19.姜葱生豪Oyster w/ Ginger, Green Onion20.豉汁炒青口Mussel w/ Black Bean Sauce21.豉汁豆腐蒸带子Tofu Scallop w/ Black Bean Sauce海鲜鱼类Seafood (Fish)1.清蒸游水石斑Steam Live Rock Cod2.清蒸蒜茸带子Steamd Scallop w/ Garlic Sauce3.豉汁煎焗塘虱Catfish w/ Black Bean Sauce4.清蒸龙利Flounder5.清蒸海鲈Fomfret6.蒸金钱片塘虱Steam Catfish7.辣汁串烧鱼B & Q Fish Stick w/ Hot Sauce8.西兰炒雪鱼球Pan Fried Snow Fish w/ Green9.菜远石斑球Tender Green Rock Cod10.豉汁石斑球Steam Rock Cod w/ Black Bean Sauce11.油泡石斑球Crystal Rock Cod12.川味石斑球Szechuan Rock Cod13.骨香石斑球Fried Rock Cod Bone14.咕噜石斑球Sweet & Sour Rock Cod15.鱼腐扒菜胆Yu Fu w/ Vegetable鸡鸭鸽Poultry1.脆皮炸子鸡(半)Fried Chicken (Half)2.红烧石岐项鸽Roast Pigeon3.豉油皇乳鸽Pigeon w/ Soy Sauce4.姜葱油淋鸡(半)Green Onion Chicken (Half)5.北京片皮鸭Peking Duck6.酸甜明炉烧鸭(半)Roast Duck (Half)7.柠檬鸡球Lemon Chicken8.西芹腰果鸡球Vegetable Cashew Chicken9.咖喱鸡Curry Chicken10.豉汁炒鸡球Chicken w/ Black Bean Sauce11.四川炒鸡球Szechuan Chicken12.菜远鸡球Chicken w/ Tender Green13.宫保鸡球Kung Pao Chicken14.豉汁黄毛鸡(半)Chicken w/ Soy Sauce15.咕噜鸡Sweet & Sour Chicken16.八珍发菜扒鸭(半)Combination Duck (Half)17.子罗炒鸡片Ginger & Pineapple Chicken18.游龙戏凤Chicken, Shrimp, Squid w/ Mixed Vegetable19.龙凤琵琶豆腐Egg, Chicken, Shrimp, Steam Tofu猪牛肉类Meat1.酸甜咕噜肉Sweet & Sour Pork2.菜远炒排骨Spareribs w/ Tender Green3.豉椒排骨Spareribs w/ Black Bean Sauce4.凉瓜炆排骨Bitty Melon Spareribs5.京都骨Peking Spareribs6.椒盐排骨Pepper Salt Spareribs7.豉椒焖排骨Spareribs w/ Black Bean, Pepper8.菜远炒牛肉Broccoli Beef9.凉瓜炒牛肉Bitty Melon Beef10.黑椒牛仔骨Black Pepper Short Rib11.椒盐牛仔骨Pepper Salt Short Rib12.中式牛柳Chinese Style Beef13.四川牛肉Szechuan Beef14.干扁牛柳丝String Beef15.柠檬牛肉Lemon beef16.麻婆豆腐Mar-Boh Tofu煲仔类Clay Pot Style1.北菇海参煲Mushroom Sea Cucumber Duck Feet2.诸诸滑鸡煲Chicken Clay Pot3.鸡粒咸鱼茄子煲Salt Fish Chicken Egg Plant Clay Pot4.粉丝虾米杂菜煲Rice Noodle Vegetables Clay Pot5.罗白牛腩煲Beef Stew w/ Turnip Clay Pot6.支竹羊腩煲Dry Tofu Lamb Clay Pot7.火腩生豪煲Roast Pig Oyster Clay Pot素菜类Vegetarian1.豪油冬菇Oyster Sauce Mushroom2.什笙上素Bamboo Vegetable3.红烧豆腐Fried Tofu4.炒素丁Vegetable Roll5.罗汉腐皮卷Vegetable Egg Roll6.素咕噜肉Vegetarian Sweet and Sour7.蒸山水豆腐Steam Tofu8.鲜菇扒菜胆Mushroom Tender Green9.炒杂菜Mixed Green Tender10.清炒芥兰Chinese Green Tender11.盐水菜心Salt Green Tender12.干扁四季豆String Bean Western Style13.上汤芥菜胆Mustard Green Tender炒粉、面、饭Rice Plate1.龙虾干烧伊面Lobster Teriyaki Noodle2.上汤龙虾捞面Lobster Noodle3.杨州炒饭Yang Chow Fried Rice4.虾仁炒饭Shrimp Fried Rice5.咸鱼鸡粒炒饭Salted Egg Chicken Fried Rice6.蕃茄牛肉炒饭Tomato w/ Beef Fried Rice7.厨师炒饭House Fried Rice8.生菜丝炒牛肉饭Beef Fried Rice w/ Lettuce9.招牌炒面House Chow Mein10.鸡球炒/煎面Chicken Chow Mein11.蕃茄牛肉炒面Tomato Beef Chow Mein12.海鲜炒/煎面Seafood Chow Mein13.虾子姜葱捞面Ginger Green Onion Noodle14.干烧伊面Teriyaki Noodle15.鸡丝上汤窝面Chicken Noodle Soup16.菜远炒牛河Vegetable Beef Chow Fun17.豉椒排骨炒河Sparerib w/ Black Bean Chow Fun18.星洲炒米粉Singapore Noodle (Hot Spice)19.鸳鸯馒头Shanghai Buns (12)20.上汤水饺Dumpling Soup21.上汤云吞Won Ton soup22.丝苗白饭Steam Rice甜品Dessert1.雪哈红莲Bird Nest Red Bean Soup2.椰汁炖雪哈Coconut Bird Nest3.玫瑰红豆沙Red Bean Soup4.椰汁西米露Coconut Tapioca5.百年好合Red Bean Fresh Lily Bulb厨师精选Luncheon Special1.酸甜咕噜肉Sweet & Sour Pork2.京都骨Peking Spareribs3.豉椒排骨Sparerbis w/ Black Bean Sauce4.凉瓜排骨Bitter Melon Spareribs5.菜远炒排骨Spareribs w/ Tender Green6.菜远炒牛肉Beef w/ Tender Green7.豉椒炒牛肉Green Pepper Beef w/ Black Bean Sauce8.柠檬牛肉Lemon Beef9.四川牛肉Szechuan Beef10.辣汁炸鸡腿Fried Chicken Leg w/ Hot Sauce11.柠檬鸡球Lemon Chicken12.杂菜鸡球Chicken w/ Mixed Vegetable13.豉椒炒鸡球Chicken w/ Black Sauce14.四川炒鸡球Szechuan Chicken15.咖喱鸡球Curry Chicken16.菜远炒鸡球Chicken w/ Tender Green17.宫保鸡球Kung Pao Chicken18.腰果鸡球Cashew Chicken19.酸甜咕噜鱼Sweet & Sour Fish20.酸甜咕噜虾Sweet & Sour Shrimp21.柠檬炒虾球Lemon Shrimp22.菜远炒虾球Shrimp w/ Vegetable23.四川炒虾球Szechuan Shrimp24.四川炒鲜鱿Szechuan Squid25.豉椒炒鱿Squid w/ Black Bean Sauce26.红烧豆腐Fried Tofu w/ Tender Green27.炒杂菜Mixed Vegetable特价小菜1.豆腐虾Tofu & Shrimps2.白灼虾Boiled Prawns3.椒盐虾Spicy Slat Prawns4.豉椒虾Black Bean Sauce Prawns5.滑蛋虾Prawns with Eggs6.油泡虾Crystal Prawns7.时菜虾Vegetable Prawns8.四川虾Szechuan Prawns9.茄汁虾Prawns with Ketchup10.豉汁炒蚬Clams Black Bean Sauce11.时菜斑球Vegetable Rock Cod12.豉汁斑球Black Bean Sauce Rock Cod13.椒盐龙利球Pepper Salt Fried Flounder14.香煎鲫鱼Pan Fried Fish15.时菜鲜鱿Vegetable & Squid16.椒盐鲜鱿Salt and Pepper Squid17.豉椒鲜鱿Black Bean Sauce Squid18.酥炸鲜鱿Deep Fried Squid19.四川鸡Szechuan Chicken20.宫保鸡Kung Pao Chicken21.当红炸子鸡Crispy Fried Chicken22.柠檬鸡Lemon Chicken23.腰果鸡Cashew Nuts Chicken24.甜酸鸡Sweet & Sour Chicken25.时菜鸡Vegetable & Chicken26.咖喱鸡Curry Chicken27.豉椒鸡Black Bean Sauce Chicken28.京都上肉排Peking Spareribs29.椒盐肉排Pepper Salt Fried Spareribs30.梅菜扣肉Preserved Vegetable & Pork31.豉汁排骨Black Bean Sauce Spareribs32.时菜排骨Vegetable & Spareribs33.蜜汁叉烧B.B.Q. Pork34.炸菜牛肉Pickled with Beef35.蒙古牛肉Mongolian Beef36.姜葱牛肉Ginger & Green Onion Beef37.豪油牛肉Oyster Sauce Beef38.时菜牛肉Vegetable & Beef39.豆腐牛肉Tofu and Beef40.四川牛肉Szechuan Beef41.柠檬牛肉Lemon Beef42.椒盐牛仔骨Pepper Salted Fried Beef Ribs43.火腩塘虱煲Roasted Pork & Catfish Clay Pot44.东江豆腐煲Tofu in Clay Pot45.海鲜煲Seafood in Clay Pot46.八珍煲Assorted Meat in Clay Pot47.柱侯牛腩煲Stew Beef Basket48.鱼香茄子煲Eggplant in Clay Pot49.虾米粉丝煲Dried Shrimp & Noodle in Clay Pot50.咸鱼鸡豆腐煲Salted Fish & Chicken Tofu in Clay Pot51.蒸山水豆腐Steamed Tofu52.红烧豆腐Braised Tofu53.麻婆豆腐Bean Sauce Tofu54.干烧四季豆Braised Green Bean55.鱼香茄子Braised Egg plant56.蒜茸豆苗Garlic Pea Greens57.豉汁凉瓜black Bean Sauce & Bitter Melon58.上汤芥菜胆Mustard Green59.北菇扒菜胆Mushroom & Vegetable60.清炒时菜Sautéed Vegetable61.蒜茸芥兰Garlic & Broccoli62.豪油芥兰Oyster Sauce Broccoli63.豪油北菇Oyster Sauce Mushrooms64.炒什菜Sautéed Assorted VegetableCopyright © 2005-2010 商务英语词汇, Inc. All Rights Reserved.版权声明:未经本站许可,任何人不得复制本站内容。
CUCCIO 手护程序

CUCCIO 手护程序⒈苹果甲边皮肤护理液涂抹在指缘处⒉橙味泡泡球:用温水溶化,清洗双手或用手碗浸泡5分钟。
⒊芒果磨砂:去角质使用,洗净双手。
⒋葡萄籽精华:去皱功效,喷于双手适量,热敷5分钟,(或保鲜膜包裹)。
⒌小麦精华指甲皮肤活化剂涂抹在指缘处⒍深层保湿按摩膏:按摩5—10分钟至吸收。
⒎牛奶滋润、南欧香草、石榴蜜三种味道手模,由顾客选择一种均匀涂于双手上,带上手套10分钟后去除,按摩吸收。
(不用清洗)⒏手霜,可选择木瓜绿茶润手液或薰衣草润手液。
⒐柠檬精华:杀菌、舒缓神经紧张,提升皮肤的分解功能;美白去斑功效。
如顾客手部有斑,在涂手霜之后将该部位油迹去除,点于有斑部位上按摩吸收按摩5分钟至吸收。
CUCCIO足护程序⒈苹果甲边皮肤护理液涂抹在指缘处⒉蓝莓、薄荷、泡腾片,用温水溶化,浸泡双足5分钟。
⒊牛奶蜂蜜磨砂:去角质使用,洗净双足。
⒋葡萄籽精华:去皱功效,喷于双手适量,热敷5分钟,(或保鲜膜包裹)。
⒌小麦精华指甲皮肤活化剂涂抹在指缘处⒍深层保湿按摩膏:按摩5—10分钟至吸收。
⒎牛奶滋润、南欧香草、石榴蜜三种味道足模,由顾客选择一种均匀涂于双足上,带上足套10分钟后去除,按摩吸收。
(不用清洗)8. 足霜,可选择木瓜绿茶润足液或薰依草润足液。
9. 柠檬精华:杀菌、舒缓神经紧张,提升皮肤的分解功能;美白去斑功效。
如顾客手部有斑,在涂手霜之后将该部位油迹去除,点于有斑部位上按摩吸收按摩5分钟至吸收。
CUCCIO产品介绍木瓜绿茶消毒洁手泡泡球(24颗)3028彻底清洁指甲,具美白及补水功效。
很好地软化和滋润皮肤及甲皮。
木瓜萃取物能令肌肤再生。
将一颗泡腾球放入水中泡浸后即可使用。
小麦精华指甲皮肤活化剂(15ML)3004滋润及保护指甲和甲边皮肤,纯天然植物精华油配方,为肌肤注入活力和养分,修护受损肌肤。
木瓜绿茶指甲皮肤活化剂(15ML)3031独特配方,将木瓜萃取物及绿茶加入红花油、葡萄籽油、芝麻油、钙质及维他命等复合物中,滋养及保护指甲,有效促进指甲健康生长。
ERC 112 冷藏控制器参考手册说明书

Manual de referencia del controlador de refrigeración ERC 112Controlador de refrigerador debotellas ERC 112Este manual de referencia está pensado para utilizarse principalmente porfabricantes de equipos originales (OEM) para los fines de la programación delERC 112. También puede ser útil para los técnicos. No pretende ser una guía deusuario para los usuarios finales./ercManual de usuario Controlador de refrigeración ERC 112AprobaciónVentajasHomologacionesProtección con contraseñaControl de temperatura para los aparatos de refrigeración.Montaje en panel frontal.CPU de última generación, gran cantidad de memoria y componentes electrónicos de alta gama permiten la utilización de un software único y versátil. Se pueden utilizar tres niveles de usuario protegidos con contraseña distintos para controlar más de 300 parámetros diferentes y así adaptarse a todas las necesidades individuales.Aplicaciones de uso final R290 / R600a empleadas de acuerdo con la norma EN/IEC 60335-2-24, anexo CC y EN / IEC 60335-2-89, anexo BB;Hilo incandescente de acuerdo con la norma EN IEC 60335-1;IEC/EN 60730;UL60730;NSF,CQC;GOST R 60730.El nivel de acceso se puede ajustar por separado para cada parámetro utilizando ‘‘Software tool’’(herramienta de software).Hay tres niveles de acceso (1, 2, 3):- El nivel 1 es para el acceso a la tienda;- El nivel 2 es para técnicos;- El nivel 3 es para los fabricantes de equipos originales (OEM).Los niveles de acceso no se pueden ajustar con los botones.Sin embargo, las contraseñas para los diferentes niveles pueden ser alteradas por el nivel de acceso que usted posee. Por ejemplo, un usuario de nivel 2puede cambiar la contraseña para el nivel 1 y el nivel2, pero no para el nivel 3.Introducción2DKRCC.ES.RL0.D6.05Danfoss. ADAP-KOOL® 2016-07Manual de usuario Controlador de refrigeración ERC 112Aplicación típicaS3 y S4 son opcionalesExhibidor con puerta de vidrioCongelador no-frost/refrigerador bajo ceroS2, S3 y S4 son opcionalesExhibidor con puerta de vidrioS3 y S4 son opcionalesRefrigerador GastronómicoS2, S3 y S4 son opcionalesCastro RefrigeradorDanfoss. ADAP-KOOL® 2016-073DKRCC.ES.RL0.D6.05ClipsSe utilizan para fijar el controlador en su lugar en caso de montaje posterior. No se utilizan con montaje frontal.Hay dos clips idénticos colocados a cada lado del controlador.Marco frontalControlador sin marco frontalMarco frontal con/sin nombre/logoEn el montaje frontal coloque el controlador por cable en el agujero. A continuación, presione el marco frontal hasta colocarlo en su posición.Las orejetas de plástico bloquean de esta manera al controlador."S1"Sensor de temperatura del gabinete"S2"Sensor de temperatura de descongelamento "S3"Sensor de temperatura del condensador, sensor de luz o sensor de movimento "S4"Sensor de temperatura Pt 1000 ohm/0°C,"di "Señal de puerta o sensor de movimientoLa función de una entrada puede serreprogramada, pero el conector no se puede mover. El conector está diseñado para una sola ubicación. "S1" a "S1", "S2" a "S2", etc.Sensor de temperatura de control Hay diferentes longitudes.Sensor de temperatura de descongelación Debe montarse en el evaporador.Sensor de temperatura del condensador Debe montarse en el condensador.Sensor de luzEs opcional y se utiliza para medir el nivel de luz ambiente alrededor del gabinete de modo que los modos de operación de noche y de día ‘‘Económico’’ y ‘‘Normal’’ se puedan ajustar de forma automática, como también el brillo de la pantalla.Sensor de movimientoDebe montarse en el frente del gabinete.Cable conector del sensor de puerta Es opcional y es un conector y cable con terminales de horquilla compatibles con loscontactos de puerta utilizados en aplicaciones de refrigeración.4DKRCC.ES.RL0.D6.05Danfoss. ADAP-KOOL® 2016-07Manual de usuario Controlador de refrigeración ERC 112Software para PCPuerta de enlace USBDispositivo de programación USBEstación deacoplamientoHerramienta de softwareSoftware de Danfoss para programar el ERC 112 a través de una puerta de enlace USB y una PC, en lugar de con los botones del panel frontal.Puerta de enlace USBLa puerta de enlace USB es una herramienta de laboratorio que ofrece una programación rápida y fácil de cualquier controlador de ERC conectado directamente a la PC.Se proporciona el kit de instalación de"Software tool" para la PC. La puerta de enlace es inventario estándar para laboratorios de fabricantes de equipos originales (OEM).Programación de una unidad individual en un laboratorioEl dispositivo USB requiere que se estéejecutando la "herramienta de software" en una PC. Permite que se ajusten parámetros en tiempo real y que se lea una gran variedad de información de estado (conexión bidireccional).Una vez que los ajustes deseados se han determinado, se guarda un archivo deparámetros específicos en el dispositivo USB para la posterior programación masiva a través de la estación de acoplamiento..Programación masiva en una cadena de montaje:La estación de acoplamiento se utiliza para la programación de alto volumen decontroladores de ERC, por ejemplo, en una cadena de montaje. La estación de acoplamiento es un dispositivo de sólo escritura.El dispositivo USB se inserta en la estación de acoplamiento. Los ajustes se cargan en cada controlador sucesivo en cuestión de segundos."Software tool" no es necesario para la programación masiva.programming.Programación rápidaDanfoss. ADAP-KOOL® 2016-075DKRCC.ES.RL0.D6.05Manual de usuario Controlador de refrigeración ERC 11230 mm 71 mm28,5 mm71 mm78,25 mm36,5 mm78,25 mm82,25 mm28 mmMontaje frontal(Bloqueo con armazón)Montaje trasero(Bloqueo con clips)Especificaciones técnicas6DKRCC.ES.RL0.D6.05Danfoss. ADAP-KOOL® 2016-07Manual de usuario Controlador de refrigeración ERC 112ConexionesDanfoss. ADAP-KOOL® 2016-077DKRCC.ES.RL0.D6.05Manual de usuarioControlador de refrigeración ERC 112* Enchufes opcionales disponibles con conexiones de tornillo se limitan a 16 ASx (di) = posición del conector.Las entradas son configurables.Números de códigoNota: Para obtener más información acerca de los tipos de sensores de temperatura y conectores, por favor consulte el folleto técnico de Danfoss “Sensores de temperatura tipo NTC para controladores de ETC y ERC”.8DKRCC.ES.RL0.D6.05Danfoss. ADAP-KOOL® 2016-07Manual de usuario Controlador de refrigeración ERC 112Software tool (herramienta de software) / puerta de enlaceEstación de acoplamientoEjemplosOperación manual con botones (Acceso Directo)El controlador puede ser controlado de tres maneras:Utilizando “Software tool”, la estación de acoplamiento de Danfoss, o manualmente por medio de los botones del panel frontal.“Software tool” es un software autorizado de Danfoss que ofrece una fácil configuración de los parámetros a través de una puerta de enlace USB.Este software se suministra por separado; para acceder a la literatura técnica y obtener más información, por favorpóngase en contacto con su representante local de Danfoss.de referencia.3. Presione “arriba/abajo” para ajustar el punto de referencia.Después de 30 segundos, la pantalla vuelve au-tomáticamente a mostrar la temperatura actual Activación/desactivación de la función ECO:1. Presione el botón “ECO”.El símbolo verde “ECO” se enciende en el modo “ECO”.Encender / apagar la luz:1. Presione el botón "Luz".Reconocimiento de las alarmas:1. La pantalla muestra el mensaje de alarma en forma intermitente.2. Presione cualquier botón para reconocerla.Protección por contraseña:1. Presione el botón “arriba/abajo” y sosténgalo 5 segundos para acceder al menú.2. En la pantalla aparece “PAS”.3. Presione "OK".4. Presione "arriba/abajo" hasta el código.5. Presione "OK".Protección por contraseña en tres niveles:1. Nivel 1: "tienda" (uso diario por el personal de la tienda).2. Nivel 2: "ser" (técnico de servicio de manten-imiento).3. Nivel 3: "OEM" (programación del fabricante de equipos originales -OEM-).utilizando "Software tool".Su nivel de acceso determinará los parámetros que puede ver y editar:1. Presione el botón "arriba/abajo" y sosténgalo 5 segundos para acceder al menú.2. El primer grupo de parámetros se muestra "tHE".3. Presione "arriba/abajo" para encontrar el grupo deseado.4. Presione "OK".5. Se muestra el primer parámetro.6. Presione "arriba/abajo" para encontrar el parámetro deseado.7. Presione "OK".8. Presione "arriba/abajo" para encontrar el ajuste deseado.9. Presione "OK".Después de 30 segundos, la pantalla vuelveautomáticamente a mostrar la temperatura actual.O Presione “Volver” 2 veces.NOTA:Los ajustes de parámetros incorrectos pueden dar lugar a una refrigeración inadecuada, un consumo excesivo de energía, alarmas innecesarias y, en el caso de almacenamiento de alimentos sensibles a la temperatura, infracciones en los principios y normas de higiene de los alimentos.Solo un operador entrenado debe realizar cambios en los parámetros.OperaciónDanfoss. ADAP-KOOL® 2016-079DKRCC.ES.RL0.D6.05Manual de usuario Controlador de refrigeración ERC 112Menú/funciones10DKRCC.ES.RL0.D6.05Danfoss. ADAP-KOOL® 2016-07Manual de usuario Controlador de refrigeración ERC 112Manual de usuario Controlador de refrigeración ERC 112Resolución de problemasManual de usuarioControlador de refrigeración ERC 112Aplicaciones típicasExhibidor con puerta de vidrio, congelador no-frost/ refrigerador bajo ceroExhibidor con puerta de vidrioNota: este es un diagrama típico (por defecto) de cableado ya que tanto la entradas (AI / DI’s) como las salidas (DO’s) se pueden asignar en forma diferente. Por favor, consulte "ASi", asignaciónManual de usuarioControlador de refrigeración ERC 112Congelador gastronómico no-frostCastro RefrigeradorManual de usuarioControlador de refrigeración ERC 112S: posición del conectorNOTA:• Seleccione sólo una función por entrada, por ejemplo, sensor del condensador o sensor de luz ambiental.• Asegúrese de que el accesorio que elija tenga un conector correspondiente a la entrada, por ejemplo, un sensor para la entrada "S2" debe tener conector "S2".• El sensor del condensador y el sensor de luz son opcionales y se pueden omitir.• El sensor de descongelamiento es obligatorio cuando se utiliza la calefacción eléctrica para el descongelamiento. Para el descongelamiento natural puede ser omitido.Matriz de aplicaciónManual de usuario Controlador de refrigeración ERC 112Sensor de control Sensor de controlSensor del evaporador El sensor de control debe estar siempre conectado y se utiliza para controlar la conexión y desconexión del compresor de acuerdo con el punto de referencia.El sensor también se utiliza para la temperatura que se visualiza.Refrigeradores verticales con ventiladorLa ubicación más común es en el aire de retorno al evaporador. El sensor se puede colocar cerca del ventilador - incluso cuando se pulsa el ventilador durante los períodos de apagado del compresor: la actualización de la temperatura se bloquea cuando se detiene el ventilador y sólo se actualiza cuando el ventilador haya estado funcionando durante un tiempo, para que el calor provocado por el ventilador no afecte la lectura de la temperatura.Para aplicaciones sensibles a temperaturas bajo cero, puede considerarse la colocación del sensor en el aire de salida del evaporador.Congeladores verticales con ventiladorSe ubica en el aire de retorno o en el compartimento del congelador.Refrigeradores sin ventiladorLos mejores resultados se obtienen normalmente cuando el sensor se ubica en la pared lateral, a 10 cm de la parte posterior y aproximadamente a un tercio de la parte inferior o donde termina el evaporador.El sensor de control debe estar siempre conectado y se utiliza para controlar la conexión y desconexión del compresor de acuerdo con el punto de referencia.El sensor también se utiliza para la temperatura que se visualiza.El sensor del evaporador sólo se utiliza para descongelar el evaporador y no tiene fines de control. Colocación del sensorColoque el sensor donde último se derrita el hielo.Por favor, tenga cuidado con los fins afilados que pueden dañar el cable.Colocación del sensorSensor del condensador Sensor de luz ambiental Sensor de puerta El sensor del condensador se utiliza para proteger el compresor contra alta presión cuando el condensador está bloqueado o falla el ventilador del condensador. El sensor de luz ambiental se utiliza para detectar el horario de apertura de la tienda.El sensor de puerta se utiliza para detectar la actividad de compra y para detener el ventilador cuando se abre la puerta.Sensor del condensadorColoque el sensor en el lado del líquido del condensador.Utilice un soporte de metal o cinta metálica para asegurar una buena conductividad térmica. Asegúrese de que el cable no pase por puntos calientes en el compresor o condensador que superen los 80 °C.Colocación del sensorEl sensor debe colocarse de manera que la luz interior no afecte al sensor.Una ubicación posible podría ser en la parte frontal del refrigerador o en la parte superior.Sensor de puertaDanfoss no suministra el interruptor de la puerta. Utilice el interruptor de puerta que posee y conéctelo al cablesuministrado por Danfoss.Danfoss no acepta ninguna responsabilidad por posibles errores en los catálogos, folletos y otros materiales impresos. Danfoss se reserva el derecho de modificar sus productos sin previo aviso. Esto también se aplica a los productos que ya están pedidos, siempre que dichas alteraciones se puedan hacer sin que sean necesarios cambios que afecten a las especificaciones ya acordadas.Todas las marcas registradas en este material son propiedad de las respectivas compañías. Danfoss y el logotipo de Danfoss son marcas registradas de Danfoss A/S. Todos los derechos reservados.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Cui Bono Robo Sapiens?Alois KnollEver since Czech writer Karel Capek’s well-known play “R.U.R. – Rossum’s universal robots” [Capek], first published in 1920 and performed in 1921, man-made robots of human-like shape have inspired fiction writers to envision worlds with artificial creatures far superior to human beings – either in friendly coexistence or taking over by eliminating their creators and leaving them behind as an ephemeral step in the evolution of life on earth. Roboticists and AI researchers, by contrast, have come to realise that there is still a long way to go if only parts of such visions are to come true. A lmost every aspect of research on humanoid robotics that has been touched on across scientific communities has taken researchers to the edge of current technology. Moreover, it has also become obvious how limited our knowledge about ourselves is when it comes to implanting those skills into a mechanical body that are neces-sary to enable a robot to mimic basic aspects of human intelligence. However, due to recent developments in enabling technologies [Brooks] (processing power, mechatronics, walking machines, articulated vision heads and more) and also due to findings and developments in other fields (e.g. studies of the human brain, linguistics, psychology), we currently observe a shift in the view of what artificial intelligence is and how it can be put to work in operational autonomous systems. This sets the stage for putting perceptive, cognitive, communicative and manipulatory abilities together to create truly autonomous humanoid robots. Undoubtedly, there are good reasons for embarking on this demanding research journey: there is no platform other than the adult-sized humanoid that is better suited to study many details of our own “being there” in a dynamically changing man-made environment, e.g. through experimentally validating Maturana’s understanding [Maturana] of enactive cognition through structural coupling both with the environment (i.e. our semi-structured world), with other humanoids and with (a society of) humans. Hence there is also no better platform to study all the different aspects of artificial embodied minds and their development through the interplay of evolving cognitive and motor skills. Most importantly, multidisciplinary research focusing on real autonomy for humanoids, i.e. their capacity to establish and maintain their own identity through self-control and self-guidance, may pave the way to robot systems (not necessarily of human shape) that not only adapt to dynamically changing environments (such as insect-level agents) but also to situations in their interactive discourse with humans for which their designers did not implement explicit rules a priori. In other words: at the end of this d evelopment there may well be robots which not only change and enlarge their initial internal set of states (and break their programmed rules) as a result of continuous learningand behaviour-based plastic adaptation to the environment, but which are also capable of evaluating the incoming multimodal information stream and explaining their emergent internal states to us humans – in our language.Potential benefits of humanoid robot research and development. The main purpose of the first series of fully functional humanoids, Waseda university’s “Wabots”, was to undertake practical feasibility studies in mechanical engineering. These d evelopments started in the mid-seventies, when the state of computing technology (but also sensors and vision, energy supply, etc.) was still far from what is needed even for a basic notion of “autonomy”. Even though at that time one could not even dream of implementing higher-level cognitive abilities as integral functions of these bodies, there were impressive achievements of the emulation of human motor skills (walking, grasping, even piano-playing). Throughout the 1980’s there was also a wave of engineering efforts into human inspired limbs, particularly multi-fingered hands, but it faded away when it became clear that there are very few, if any, immediate in-dustrial applications. From today’s perspective, however, as complete humanoids are within reach, we can draw on the experience from all these designs and attempts. We observe a growing enthusiasm about the usefulness of humanoids research because we can now see more clearly what potential benefits, i.e. direct applications but also spin-offs, might be: • Service: Unlike autonomous service robots that perform a more or less limited range of special tasks with or without human supervision, a humanoid robot can in principle use the same tools and appliances as humans and may hence become as flexible in adapting to new tasks as a human being. On condition that it is close enough to hu-man shape and size, it may also operate in totally unchanged man-made environ-ments. Moreover, if it is capable of receiving its tasks by carrying on a dialogue with human instructors involving speech, gestures and facial expressions, then it will pro-vide a functionality that surpasses by far anything that today’s service robots have to offer. Completely new markets may evolve. Of all the items in this list, this is undenia-bly the one that r equires most multidisciplinary research efforts before we can even think of building prototypes.• Prosthetics: If we think of the humanoid robot as a collection of prostheses for limbs but to some extent also for sensors, then it becomes clear that prosthetics and h u-manoid research may very fruitfully profit from each other. While there is still little evi-dence that “cyborgs” may ever be realised or the human mind be transferred to these machines, prostheses that afford some autonomy of their own may become an alter-native to current designs, at least until it is possible to “re-grow” human organs. From this point of view it makes sense to subsume humanoid robotics under “biomedical ro-botics” or even “medical robotics” in the wide sense. The latter is especially true if wealso take into a ccount the potential of humanoids to become an invaluable help for those elderly people who need permanent home care.• Education: Basically there are two different uses for humanoids in education. (i) Stu-dents build humanoids to learn in a practical exercise about their mechanical construc-tion and the complex software modules that control it. There are quite a few universi-ties in Japan where this is common practice. To spread such education opportunities around the world, it would be highly desirable to have a standard kit available that con-tains the essential building blocks in modular form. (ii) Students use humanoids to ex-periment with and enhance their skills. The aim should be to make them very easy to use, to clearly specify their interface so as to enable non-roboticists and even students of non-engineering faculties to quickly become familiar with the robot.• Entertainment: robots of human shape used for animation and advertisements at exhi-bitions and fun-fairs do not depend on a highly developed set of skills. It is usually rather their bodily appearance that attracts people because they discover human traits in these machines. To maintain a certain “surprise-factor” over time, however, it will be necessary to constantly improve their skills. D epending upon the target application, this may even include grasping and sophisticated navigation, e.g. for showing visitors around, manipulating and e xplaining the objects on display in a natural way. At the other end of the spectrum, small-sized humanoids may well play the role of toys for children that exhibit a greater wealth of behaviours and may hence be much more in-teresting for children to interact with than artificial animals.While products resulting from development in these areas may well succeed in traditional markets and create new ones, the greatest challenge from a research perspective is the use of h umanoids as subjects in Cognitive sciences. Without doubt there is no other machine conceivable on which we may simulate more realistically the development of cognitive proc-esses in developmental psychology, linguistics, etc. – emulating perception and action in the same world in which human beings grow up. The humanoid robot's body, if equipped with a rich set of human-like sensors, generates a stream of multimodal and multidimensional in-formation about the environment that very closely resembles the input to the human percep-tion system. The “motor side” also requires the control of actuators in an extremely high di-mensional workspace to act in the real three dimensional world in real time, similar to what the human nervous system has to control. Research need not be limited to study individual development; one can also imagine the study of “inter-humanoid” relations in humanoid so-cieties or the evolution of collective intelligence in swarms of humanoids.Interestingly enough, direct military uses are currently hard to imagine: not only because fine-grained delicate manipulation and flexible adaptation to three-dimensional environments arenormally not at the heart of military operations, but in particular because the increasing spe-cialisation of military tasks does not necessitate a general purpose robot modelled on the human soldier (at least not in the battlefield). This does not mean, however, that there is no transfer of technology conceivable: think of the current efforts of building force-amplifying exoskeletons that will require energy sources which humanoids design may well capitalise on.Scientific challenges. Some aspects of humanoids design and control, such as various key components, basic walking, gross body motion, and active vision have been studied exten-sively and successfully. Methods, architectures and software are available that enable h u-manoids to perform basic actions, which easily make unbiased people think that these ma-chines are indeed not far from living creatures. However, the central question is true auton-omy, i.e. the capacity of self-guidance and self-control. This, in turn, implies necessarily that the designer of the humanoid accepts that the robot evolves over time, increasing the “dis-tance” between states, patterns (of sensor input, of behaviour and of motion) and representa-tions that were originally programmed, and add new ones – at some point in future time it may even have the capacity to change its body shape. From our point of view there are four categories of interdependent research categories that must be pursued in the quest for full autonomy:(a) Brains and mind: The central shortcoming of traditional robot systems, adaptive andcapable of learning or not, is their closed set of structurally different behaviours and skills.Their parameters may be adjustable and their behaviours may have the potential to be combined and blended, but they will nevertheless always remain slaves to their design-ers’ foresight. This will only change once we understand how the humanoid can construct its own individual epistemology. Firstly, this construction process calls for the definition of basic instincts (and primary goals) which, in combination with correspondingly selected behaviours and sensory abilities, allow for this individual development, e.g. through active exploration. Secondly, an appropriate set of constraints and a choice of limiting condi-tions must keep the internal state of the robot within consistent boundaries during the self-directed process of development. Thirdly, and most i m portantly, an architecture is needed that embeds and networks these initial skills through the definition of an “informa-tion flow” and channeling through selection. This is much like the structure of living crea-tures at birth: though we all start from a heap of cells, the shape and function of our nerv-ous system is formed before our birth, i.e. before we first come in contact with the world in which we develop our individual skills by training our brain (regardless of the interde-pendence of this structuring process and prenatal stimuli). From cognitive science and brain research we have a clear indication that the adult human brain implements two dif-ferent categories of information processing [Christaller]: fast parallel “wired” processing and slower, more adaptive serial processing on different time-scales. The line between the two cannot be drawn sharply and it is also possible that skills deliberately and con-sciously acquired through learning in “serial mode”, if trained over and over again, may fall below the level of consciousness – driving a car and swiftly switching gears without being aware of the underlying complex motion sequence is one of the prominent exam-ples, playing chess and after a while being able to almost instantly assess the situation on the chess board is a less well-known example [Dreyfus]. Humanoids’ control architec-tures that are capable of evolving based on only very few built-in dispositions will almost certainly have to be modelled on such distinctions. Furthermore, for controlling the vari-ous reflexes but also the high-level skills necessary for social interaction and learning, i.e.the coupling of sensing, behaviour and reasoning (situated perception-action cycle), these a rchitectures will have to contain ingredients from the behaviour based approach.There will be a point in the development, however, when we shall see the return of “old AI” techniques, particularly the notion of representations and the reasoning about them along with some kind of introspection and “explainability”, e.g. in the sense of the ability of the robot to explain why it took what action. The control of the co-evolution of cognitive and manipulative skills by continuous evaluation of sensorimotor feedback stimuli is an-other challenge. Here, meditating entities, i.e. representations for categories and con-cepts, must be carved out through continuous interaction with the environment (and other members of a humanoids “society” or human beings). Again, the problem will be the self-directed c oordination between action-selection, corresponding sensor interpretation and temporary/persistent representation generation (in a predefined format or not). While there have been some attempts to generate categories autonomously based on sensory stimuli, the subsequent step of successfully self-building a tailored non-trivial reasoning and introspection system on top of these has not yet been demonstrated. We tend to hy-pothesize, however, that the development of higher cognitive skills, like planning and the evolution of a common ontology as well as a language (and gestures) between members of a society, becomes pretty easy once the essence of categorisation (and grounding of patterns in these categories) is cleared up.1 Of course, some scientists (e.g., Chomsky) believe that language is genetically coded. Finally, the problems of introspection, reason-ing about the robot’s own state in terms of lower-level representations for obtaining some kind of consciousness and anticipation of the behaviour of other members of the society along with the organisation of “bootstrapping effects” in mind development as well as1 Note the analogy between this hypothesis and R. Brooks‘ statement about the …essence of being there“ as well as the reasons he gave for that in his 1987 paper about …Intelligence without reason“. Arguably, the time it takes infants to categorise objects is much longer relative to the time it takes them from there to start speaking – then things speed up considerably.fundamentally new learning techniques (learning by discovery, by insight, by producing goal-directed random ideas at a conceptual level) will pose questions to researchers far beyond the present scope of humanoids research.(b) Interaction with Humans and the Environment. For humanoid robots to continuouslyextend their range of skills and transcend their initial state of mind and body, it is neces-sary to implement both sides of structural coupling in as sophisticated a manner as that found in humans. The ability to interact with humans is highly dependent on the expres-sive power communicable by the body (face expressions, body language) and the ability of the mind to control and interpret multimodal output and input. We note that traditional systems for “teaching by demonstration” or skill transfer have not met with much success.We identify three main reasons for this failure: (i) Instruction input is monomodal, mostly through a fixed camera. This precludes the system from constructing cross-modal asso-ciations by evaluating clues from more than one modality. It also prevents the instructor from giving additional explanations in “natural” modalities, e.g. teaching movements of the hand supplemented by instructive speech statements. (ii) Partly due to monomodality the instruction is not in the form of a dialogue between the instructor and the robot. Dia-logic interaction may be the source of additional information in “normal” instruction mode, but it becomes indispensable in the case of error conditions. (iii) Due to input from only one location (i.e. the aforementioned fixed camera) there are no redundant multi-dimensional views available that could be used to emulate to some degree the body and head motion that humans use mostly unconsciously to deal with ambiguous situations or occlusions. Moreover, there seems to be no adequate approach to evaluate the instruc-tion stream in terms of its usefulness for learning. In other words: which parts of the input stream (e.g. hand motions) are innovative with respect to the abilities acquired up to a certain point? Redundancy would help to differentiate between elements in the instruction flow that contribute to the learning goal and those that do not. Humanoid robots, if mobile and equipped with a full set of sensors for all modalities needed for being taught a certain class of tasks (e.g. vision, speech and touch), are perfectly suited to learning through demonstration but to also demonstrating during the learning process what and how well they have learned it, which in turn enables the instructor to repeat critical phases – ex-actly in the way we would teach a human child. The highly abstract but powerful meta-phor for this kind of intelligence development is imitation; it encompasses both motor and cognitive aspects [Schaal]. This metaphor subsumes a whole set of individual learning approaches. It holds the potential to acquire structurally new sensor/action sequences, which have in no way been pre-programmed. Implementing them on a humanoid in sucha way that the human counterpart takes the humanoid seriously requires that a plethoraof individual techniques be available to the robot controller (in the form of predefinedand/or evolving skills): (i) recognition, production and integration of natural lan-guage/speech, gestures, facial expressions, (ii) expression of desires, intentions and emotions, (iii) keeping the focus of attention across modalities, (iv) learning to re-recognise specific situations, (v) fault tolerance obtained by multisensor perception and compensation, and (vi) adaptation to individual human habits, culturally different customs and idiosyncrasies.(c) Structure and Purpose of Body and Limb Movement. As argued above, the motion ofthe humanoid in many dimensions is an indispensable ingredient of learning and the emergence of even primitive forms of “intelligence”. Not only is this plasticity the precon-dition for continuous structural coupling with the world around us, but it is also the basis for social and physical interaction with human beings or with other humanoids for coop-erative tasks (with or without parallel explicit instruction/communication over “channels”).This challenge is the point where humanoid design requires a departure from the meth-odology used for obtaining insect-level intelligence: not only are motion sequences much more complex but they are also deliberate in the sense that they serve different purposes under different tasks. Identical motion patterns may be triggered by reflexes but also will-fully. There is ample evidence that there is a strong link between human motor skill and cognitive development (e.g. [Lakoff). Our abilities of emulation [Clark], mental modelling and planning of motion are central to human intelligence and, by the way, a precondition for anticipation, but they also critically depend on the experience we have with our own body dynamics as we plastically adapt our body’s shape to the environment. Apart from this direct link to/from the humanoid mind, there are many practical research fields that have seen dramatic advances in the recent past (e.g. bipedal walking with anthropomor-phic legs) but that still require detailed study before we come even close to the perform-ance observed in biological systems: (i) whole body gross and fine motion (and its learn-ing by observation and demonstration), (ii) body-centred behaviours (limb coordination) and posture stability, (iii) learning of arm motion, grasping and sensorimotor control for delicate manipulation tasks including adaptation/generalisation to new tasks, e.g. starting from new (unknown) situations of body and/or object configuration, (iv) navigation, plan-ning of movement and collision avoidance under dynamically changing boundary condi-tions (v), locomotion, gait and foot-placement, and (vi) simulation of body and limb d y-namics and the use of such simulators not only for the designer but also as a “mental tool” for the humanoid.(d) Architecture and System Design. The recent discussion about the overall nature ofcognitive systems (dynamical systems vs. symbol interpreters [Gelder]) notwithstanding, the architecture of the control system, i.e. the collection of centralised and decentralised control structures for component coordination, must host the abstract functions that en-able development. While the physical implementation (organic vs. anorganic) and the representation of information flowing through the humanoid may well change over time, the architecture will have to afford mechanisms to structure the “primordial soup” of pro-grammed initial behaviours, skills and instincts. Most likely, the architecture will contain low-level elements for high throughput processing whose adaptation ends after some time with only a minimal degree of plasticity r emaining and other elements that warrant long-term adaptivity – the former without explicit representations and the latter relying on them. The main question will be how they can be tied together in such a way that a rea-sonable convergence is obtained after some time of development. This intriguing problem of architecture layout is inextricably interwoven with the achievements in mechanical and sensor design. Progress achieved here is i m mediately communicable even to non-experts: (i) mechatronics of hands, feet, legs, arms, heads; new types of actuators includ-ing materials for actuators and skin, (ii) sensor design (articulated vision, tactile, direc-tional ears, new sensing principles), and (iii) evolutionary hardware.Scanning the issue. We have a collection of papers that spans the whole gamut of human-oid robot research. One part of this set is in a special issue of “Robotics and Autonomous Systems” (RAS) published by Elsevier Science, the other part is published in this special issue of “Autonomous Robots” (AR),ordered by subject category. This includes the robot structure and physical capabilities, whose properties are studied both through experimental prototypes, as well as simulation systems. Hashimoto et al. (AR) present two fully operational humanoids developed at Waseda university, where much of the pioneering r esearch in the field was done. “Hadaly”, which is a torso on wheels, was developed with human-humanoid interaction in mind; it integrates vision and voice recognition with gesture generation. “Wabian”, by contrast, can walk on legs and was built as a prototype of a humanoid that can carry objects in a household setting. Furuta et al. (RAS) describe the design and construction of compact h umanoid robots. Bipedal systems are developed with walking control in which energy efficiency, hardware load balancing, and real-time gait generation are all handled. The paper by Nakamura et al. (RAS) demonstrates a humanoid robot simulator that can emulate the dynamics of motion of various robot structures based on virtual links. Their sys-tem can handle bipedal motion, standing, and collision avoidance. The virtual humanoid ro-bot platform can be the virtual counterpart for a robot platform. Kuffner et al. (AR) address similar issues: they develop a new algorithm for automatically generating motions from full-body posture goals under the boundary conditions of dynamical stability and collision avoid-ance. The algorithm was implemented on a dynamical model of the H5 humanoid robot; re-sults of sample runs are presented in the paper. Kagami et al. (AR) introduce a trajectory generation method for h umanoids using the standard ZMP approach. Their fast algorithm isbased on a simplified robot model, it allows for the generation of trajectories even if several limbs are in contact with the environment, and it has been tested on the H5 humanoid.The following papers consider various approaches to transferring human behaviors and skills to humanoid robots. Ude et al. (RAS) describe a real-time visual system that can learn and interact with humans. The system uses shape and color in conjunction with a probabilistic tracker. This allows the system to avoid being brittle and it is reliable in a complex environ-ment. Stoica (RAS) also proposes a method to transfer skills to the robot by close interaction with a human. This requires anthropomorphic robots, and involves the visual tracking of arm motions and their mapping onto the robot structures. This approach is arguably more efficient and sets the stage for the study of developmental robotics. Fod et al. (AR) propose a method for extracting and classifying the movements of a human arm for imitation learning. They start with a repertoire of movement primitives that an agent can execute, observe the move-ments of a human arm, cluster the observed data using principal components analysis to associate them with elementary movements taken from the repertoire and can then closely reproduce the original sequence of movements. Storing and retrieving motion patterns is also in the focus of the paper by Riley et al. (AR). They describe a dynamical systems approach for realizing ball catching on the Sarcos humanoid robot, which predicts the ball-hand impact and generates human-like motion trajectories for catching. Billard et al. (RAS) develop a model of human imitation, in this case of two-arm motions. Their approach is biologically in-spired, and is based on a hierarchy of artificial neurons. They have a 37-DOF humanoid ro-bot, and human data is used. Both human learning and robot learning data are compared. Vijayakumar et al. (AR) demonstrate how learning in high-dimensional parameter spaces can be performed in real-time based on an infinite stream of input data. The goal is to learn the inverse kinematics of a 7-DOF anthropomorphic robot arm for a specific task. As an example task the arm is to draw an “eight” in space, and using their locally weighted projection r e-gression algorithm, it takes only one minute to learn the local kinematics model. In the paper by Cheng et al. (RAS), human-robot interaction is studied in the rich context of stereo vision, auditory systems and proprioception. This is coupled with high-performance motor control. The system features parallel sensory channel perception analysis and integrated system response.The remaining papers consider the cognitive development of humanoid robots from very dif-ferent standpoints. Scasselatti (AR) takes a relatively abstract view. He proposes the devel-opment of a “theory of mind” for humanoid robots based on the fundamental social skills for humans: the attribution of beliefs, goals, and desires to other people. His paper briefly sum-marises some of the theories of the development of theory of mind in human children and discusses the potential application of these theories to building robots with similar capabili-ties. Asada et al. (RAS) propose the study of cognitive developmental robotics as a way to。