基于X3D的大规模三维地形场景构建
基于openGL的三维地形场景的生成

基于openGL的三维地形场景的生成1、背景介绍 (3)2、openGL中地形动态显示 (3)3、程序的主要功能 (4)3.1 三维地形的生成 (4)3.2 天空盒的生成 (8)3.3 树的生成 (9)3.4 3DS模型的读入 (11)3.5 键盘交互实现漫游 (11)3.6汉字的显示 (12)4、总结 (13)4.1 项目总结 (13)4.2 小组成员分工 (14)参考文献 (15)1、背景介绍地形是自然界最复杂的景物之一,对其三维显示和漫游一直是计算机图形学、地理信息系统、数字摄影测量和遥感研究的热点之一。
但由于受地形结构复杂,数据量大等条件的制约,要实时模拟具有真实感的大范围三维地形,最大的难点是,如何精简并有效地组织地形数据,以达到高速度、高精确度的可视化目的。
openGL是开放式图形工业标准,是绘制高度真实感三维图形,实现交互式视景仿真和虚拟现实的高性能开发软件包。
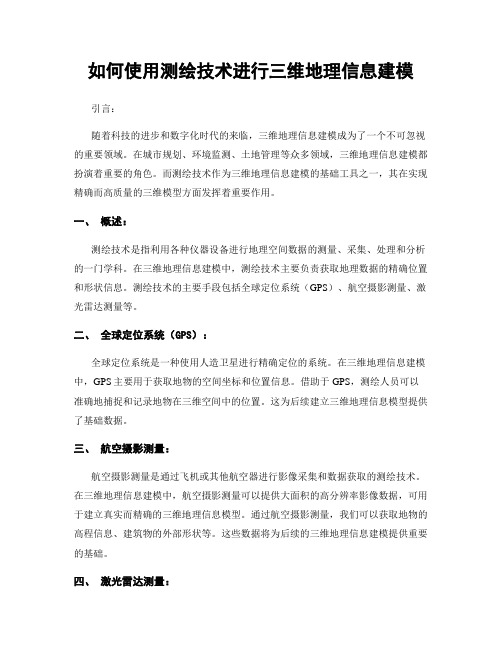
利用openGL进行地形动态显示的基本框架如图1所示:图1 openGL地形现实基本框架2、openGL中地形动态显示利用openGL进行地形的三维可视化,包含以下几个步骤:(1)openG L模型映射:利用openGL 制作三维立体地形图,就要将数字地面模型格网用openGL提供的点,线,多边形等建模原语描述为openGL图形函数所识别。
(2)遥感图像与地形融合:openGL提供两类纹理:一类纹理图像的大小必须是几何级数;另一类Mipmaps 纹理可为任意大小。
在Mipmaps纹理映射的基础上,可将遥感图像与地形融合。
在遥感影像与数字地形相套合时,地形与遥感影像的配准是关键。
为了获取更好的视觉效果,配准方案可采取数字地形向遥感图像配准,通过控制点,建立匹配方程,将数字地形由大地坐标系转到影像坐标系中。
(3)观察路线设置与视点计算:为了达到三维交互控制的目的,可在正射的遥感数字影像上任意选择观察路线,对路线上的采样点记录其平面坐标,根据采样点的平面位置从DEM 中采用一定的插值方法,确定观察路线上采样点的高程和平面坐标,当采用Fly-through方式观察时,观察路线上每个视点的高度可由观察点地面高程加上飞行高度确定当采用walk-through方式观察时观察路线上每个视点的高度可由观察点地面高程加上身高来确定(4)实时显示Opengl 提供了双缓存技术,通过它可实现地形实时动态显示。
基于3DS+MAX环境的3维场景重建工具

文章编号:1009-427X (2002)02-0109-04基于3DS MAX 环境的3维场景重建工具阎晓东 张永生(信息工程大学测绘学院 河南郑州450052)摘要:介绍了3DS MAX 中利用DEM 和数字正射影像重建真实3维场景的方法O 通过MAXScript 和VC 混合编程 在3DS MAX 4.0环境中构建了一个3维环境重建工具O 利用该工具可以导入Leica /~elava DPW 数字摄影测量工作站采集的DEM 数据和建筑物数据 自动生成地形模型和建筑物模型 重建真实的3维场景O 该工具支持DXF ~DSW 等通用CAD 数据的输入 并可以把场景数据输出为虚拟现实造型语言(VRML )文件O 关键词:3维重建;数字高程模型;3DS MAX ;MAXScript中图分类号:P 237文献标识码:A随着数字摄影测量技术的发展 数字高程模型(DEM )自动提取和数字正射影像自动生成的技术已经成熟 目前几乎所有的数字摄影测量工作站都包括3维地形可视化模块 如L~Systems 公司的SOcet Set 系列 Intergraph 的ImageSta-tiOn 等O 同时 卫星遥感技术的飞速发展和航空遥感技术的广泛应用为3维环境的重建提供了大量真实且现势性强的高分辨率影像数据资源O 利用摄影测量技术采集高精度的空间几何数据和真实影像纹理 在计算机中重建和恢复真实的3维场景 具有重要的现实意义和广泛的应用前景O对真实景物的计算机描述 从广义上讲应该是对真实世界物体及其周围环境的完整描述 但在计算机图形学~计算机视觉~虚拟现实~CAD /CAM 等众多领域 最为普遍的需求却是对物体表面性状的描述 即完成3维物体的几何建模(GeO-metric MOdeling ) 包括对物体的形状(多边形~三角形和顶点)以及它们的外表(纹理~颜色~表面反射系数)的描述O 对象形状(Object Shape )可以通过OpenGL 等图形库创建 但最简便的方法是结合具体应用 利用CAD ~VR 建模工具创建O 目前流行的3维重建软件(工具)都提供对DXF 或3DS 等CAD 文件的支持O 对于复杂物体模型的创建 较为普遍的做法是利用AtuOCAD 或3D Stu-diO MAX (以下简称3DMAX )等CAD 软件建模 保存为DXF ~3DS 等格式的数据文件 最后在程序中调用O文中利用摄影测量的方法获取物体(地面~建筑物)表面特征点的空间几何数据;基于物体的不同分类 利用3DMAX 重建地形和建筑物等实体对象;基于MAXScript 和VC 混合编程实现 构建的3维重建工具以插件的形式嵌入3DMAX 既可以作为独立的3维场景的浏览和查询工具 又可以通过数据整合 为其它3维重建系统和VR 系统提供数据源O 1真实场景3维重建的基本方法及实现技术3维环境重建的对象包括地形~建筑物~水系以及道路~管线等市政设施O 其中主要的两类是地形和建筑物O 图1描述了简单的3维场景模型结构组成 图2是3维场景重建的工作流程示意O:2002-02-10作者简介:阎晓东(1973-) 男 河北张家口人 硕士生 主要从事数字摄影测量与3维可视化研究O第19卷第2期2002年6月测绘学院学报JOurnal Of Institute Of Surveying and MappingVOl.19NO.2Jun.2002表面纹理数据及建筑物侧面纹理的获取DEM数据和地面的正射影像在摄影测量工作站上从遥感立体图像中自动获取建筑物模型数据按照划分的不同类型在摄影测量工作站上采集数量不等的边缘点和特征点建筑物的侧面纹理数据结合正射影像和地面近景摄影的方式获取由于3DMAX中对于单个对象几何数据和纹理大小的限制需要预先对DEM数据和正射影像数据分块处理采集的数据以数据文件的形式保存通过编写的I/接口导入3DMAX1.2坐标系统和比例尺设定3DMAX提供了7种变换坐标系其中View~Screen和World坐标系均为右手坐标系且固定不变文中选用World坐标系它不随视图的改变而变化总是唯一而且固定不变的在World坐标系中X轴表示水平向右Y轴竖直向上Z轴表示深度方向在3DMAX中默认情况下用Generic(通用)测量系统创建对象和场景以定义1英寸为系统的1个单位通过选择Units Setup(单位设置)功能能够将场景中的单位设置为Metric(公制)~US Standard(美国标准)还可以选择Custom(定制)根据需要自定义测量单位从而确定整个场景的比例尺由于在3DMAX内部存储的是没有特殊含义的通用单位的长度一旦改变了System Unit Scale(系统单位比例尺)的含义就改变了场景中所有对象的测量结果的含义因此在建模前必须首先设定并锁定系统单位比例尺1.3地形的3维显示1.3.1地形表面建模对地形表面进行表达称为地形表面重建或地形表面建模地形表面建模实际上就是DEM表面的生成当DEM表面建模后模型上任一点的高程信息就可以从DEM表面获取文中定义了GRID和TIN两种DEM结构利用3DMAX的Mesh类对象来描述GRID规则格网数据结构简单通过改变Mesh对象节点的坐标即完成地形表面重建但无拓扑关系TIN 不规则三角网用三角面描述其结构为Struct{vertices,<point3组>//构成三角面的节点在当前坐标系中的3维坐标faces,<point3组>//指定形成一个面的3个节点的索引数materialIDs,<整数数组>//指定面所用材质的ID号tverts,<point3组>//贴图节点组中的每一个point3值指定贴图节点的UVW坐标}其中point3表示节点的3维坐标Vertices中节点的3维坐标与faces中的索引数相对应这样就建立了相邻三角面的拓扑关系1.3.2DEM数据简化对于地形起伏不大的区域(如平坦地区或水域)DEM规则格网结构数据存在大量的冗余直接影响3维模型重建和纹理映射的速度因此从DEM数据中剔除次要的格网点去简化DEM 数据十分必要文中对相对平坦的区域采取删除DEM节点的策略对DEM数据进行了简化图3显示同一区域简化前后的DEM线画图图3同一区域简化前后的DEM线画图1.4建筑物的建模和显示建筑物重建是3维重建中一个重要的环节如何真实地在计算机中表达现实世界的实体对象是当前计算机图形学的一个重要研究方向目前的方法一般分为3类,基于图像绘制~基于几何造型以及基于几何和图像混合在基于图像绘制的系统中场景模型由场景的一个图像集合和与之对应的深度映射组成当图像中每一点的深度已知时可以采用把图像中的像素投影到3维空间中正确位置再重新投影到新的图像平面上的方法来得到任一邻近视点的图像对于大规模场景基于图像绘制系统需要很多照片这使得存储成为瓶颈;另一方面基于图像绘制系统提供的场景交互能力有限大大限制了其应用基于几何造型的方法通常使用3DMAX~Au-toCAD等造型软件手工搭建模型这种方法涉及到测量现场~模型定位~转换CAD数据等工作模型生产效率较低在工业成品设计~建筑设计规划~室内装修设计等方面应用广泛一般很难用于快速生成大范围3维场景若采用手工建模的操作方式模型数据精度难以保证文中应用摄影测量的测量成果通过MAXScript编程克服了一011测绘学院学报2002年般的几何造型方法手工搭建模型效率低~无精度保证的缺点在3DMAX中自动生成大范围建筑物实体模型O3DMAX提供了丰富的建模工具可以精细刻画建筑物的任何细节O在建模前首先要综合考虑模型细节程度~文件大小和建模效率等因素选择合适的建模方法O其中对复杂建筑物的合理~有效分割是提高建模效率的关键O实验中将建筑物按照结构特征分为3类,D水平切面唯一的建筑物;@侧剖面唯一的建筑物;具有轴旋转对称特性的建筑物O针对不同类别在数据采集时采集数量不等的边缘点和特征点导入3DMAX后自动转化为3维实体模型或手工重采建模O特征点的多寡决定重建后模型的细致程度O点坐标中记录了对应的3维空间位置在重建后可以正确恢复建筑物的方位特征和几何特征O为此在数据文件中定义了以下的结构,Struct{int type;//建筑物类型int Vertexnum;//特征点数量float XX;//特征点X坐标float YY;//特征点Y坐标float ZZ;//特征点Z坐标;//共有Vertexnum组float hh;//第1类建筑物的相对房高第2类建筑物放样边长}图43类建筑物建模过程示意图如图4所示对水平切面唯一的建筑物采集顶部边缘上的特征点依据相对房高自动重建3维实体O对侧剖面唯一的建筑物采集一侧面特征点生成建筑物侧面2维线框图形然后沿放样边(Path)放样或压缩生成3维模型O对具有轴旋转对称特性的建筑物采集特征点应用3DMAX的Lathe等工具生成3维模型O1.5纹理贴图精心制作的模型真实性~可视效果如何很大程度上依赖于如何组织和应用纹理O不管模型构建得多么细致如果不给对象赋予真实可信的纹理最终的场景总是缺乏真实感并难以让人信服O3DMAX使用UVW坐标空间来描述位图和贴图O UVW坐标空间中U和V表示与位图相关的高度和宽度单位W空间把贴图投影改变90 O 纹理贴图即是建立对象几何空间(XYZ坐标空间)和UVW坐标空间的映射关系O3DMAX提供了6种贴图投影方式,Planar(平面)~Cylindrical (圆柱)~Spherical(球形)~Shrink Wrap(收缩包裹)~Box(方体)~Face(面)O针对不同几何形状的对象选择不同的贴图投影方式并且根据对象几何体类型的不同和所期望的表面效果而设置不同的优化选项以求达到真实再现现实场景的效果O 对于地形对象由于采用经过数字微分纠正过的正射影像作为纹理贴图从World坐标系到UVW坐标空间的映射关系相对简单采用Pla-nar贴图方式即可使每个DEM格网与其所在的影像位置一一对应也就实现了影像和DEM的正确套合O对建筑物则根据外部几何形状不同对不同侧面采用不同的贴图投影方式O1.6交互操作和空间查询在构建的3D场景中可以实现3D坐标查询~建筑物属性查询~空间距离量测及图形采集和编辑等功能O点的空间信息查询O可以查询任一点的地面空间坐标O对于隐藏点(遮蔽点)可以通过改变视角来查询O距离查询O取3维场景中的任选路线L路线的长度就是组成L的离散点间的线段长度Lz j+1之和L=LdL z j+1=znLL z j+1(n为线段总数) 1.73维环境漫游和动态显示根据需要可对单模型进行任意旋转~缩放或移动对整个场景可以任意选取路线进行漫游并可以将漫游过程录制为.avi动画文件进行回放O2实验在P I550E~内存256Mb和普通3D图形显示卡的微机平台上利用VC和MAXScript编程在3DS MAX4.0环境下实现了插件式的3维重建工具O文中实验选用了两个区域的实验数据DEM数据和建筑物数据从Leica/~elava DPW 数字摄影测量工作站上采集获取O111第2期阎晓东等,基于3DS MAX环境的3维场景重建工具实验区域l 大小为900m >l 400m 地面较为平坦 DEM 格网间距50m O 建筑物335幢 地面正射影像大小为2048>2048像素O DEM 采用规则格网 预处理时 DEM 预先切割成等大小的l6块O DEM 数据和建筑物数据通过编写的数据接口导入 分别以yyc .dem 和yyc .bld 数据文件保存O DEM 重建时间0.5s 建筑物重建时间l 9s O 图5为该区域数据重建的3维场景的一部分O实验区域2地形起伏较大 DEM 大小为l 07行>l87列 格网间距40m O 建筑物82幢 地面正射影像大小为2048>l 024像素O 图6为多视图显示的该实验区3维场景 图中右侧为二次开发的浮动式中文操作面板O 3结论在目前情况下 3维重建工具的实用性应该是第一位的O 文中构建的重建工具 通过引入摄影测量手段获取的高精度空间几何数据 克服了一般CAD 工具3维建模无精度控制的缺点O 利用此工具先后进行了两个实验区的实验 实验证明:对3DMAX 进行二次开发构建的实用型3维重建工具 具有方便灵活的模型修改和实时编辑操作功能 可以应用于城市~山区的3维重建工作O 重建的场景具有较强的可视效果和互操作性能 特别适合小区域的规划设计~3维浏览等用途O本工具仍有许多需要进一步改进之处:l )由于3DMAX 本身对单模型三角面数量的限制 对于大区域的地形模型需要预先分块处理;2)由于没有实现与数据库的挂接 几何数据和纹理贴图以数据文件的形式管理 有一定的安全隐患;3)空间分析功能需进一步加强O 参考文献:[l ]张永生.遥感图象信息系统[M ].北京:科学出版社 2000.[2]常歌.基于遥感数据的城市景观建模技术研究与实践[D ].郑州:信息工程大学测绘学院 200l.[3]周昆 等.VECW :一个虚拟环境的构造和漫游系统[J ].计算机辅助设计与图形学学报 2000 l 2<5):355-359.[4]杨宝民 等.分布式虚拟现实技术及其应用[M ].北京:科学出版社 2000.A 3D Scene reconstruction tool based on 3DS MAXYAN Xiao -dong .ZHANG Yong -sheng(Instztute of surueyzng and mappzng ,Informatzon E ngzneerzng U nzuerszty ,Zh eng zh ou 450052,Ch zna JA b stract :T his p a p e r in tr od u ces ho W t o r eb u ild 3D scene u sing DEM and o rt hog r a p h in 3D S MAX .It also in tr od u ces ho W t o de V elo p a t ool t o r eb u ild 3D scene by VC and MAX S c r i pt in 3D S MAX 4.0.T he t ool W ill f i r s t im p o rt DEM and b u ilding f ea tur e da t a t ha t e xtr ac t ed by L eica /Hela V a D P W and t hen gene r a t es DEM and b u ilding models a ut oma t ically .Es p ecially t his t ool s upp o rt s im p o rt o f DX F .D S W da-t a f o r ma t e t c .It W ill also e xp o rt scene t o V R M L f o r ma t .K e y w ords :3D r econs tru c t ion :DEM :3D S MAX :MAX S c r i pt责任编辑李慧典2l l 测绘学院学报2002年。
三维场景中大规模地形地貌的生成

第3 0卷 第 1 1 期
2 01 3年 1 1月
计算 机应 用与 软件
Co mp u t e r Ap p l i c a t i o n s a n d S o f t wa r e
V0 1 . 3 0 No .1 1
NO V.201 3
三维 场 景 中大 规 模 地 形 地 貌 的 生 成
TH E GENERATI oN oF LARG E. S CALE T ERRAI N AND ToPoGRAP HY I N 3 D S CE NE
L i Y u j u a n ’ T a n T o n g d e
( H e n a n P r o v i n c i a l K e y L a b o n I n f o r m a t i o n N e t w o r k i n g, Z h e n g z h o u U n i v e r s i t y , Z h e n , C h i n a ) 。 ( S c h o o l o fI n f o r m a t i o n E n e e r i n g , Z h e n g z h o u U n i v e r s i t y , Z h e n g z h o u 4 5 0 0 0 1 , H e n a n , C h i n a )
SmartD系列教程之案例实战演练大区域的地形三维重建

S m a r t D系列教程之案例实战演练大区域的地形三维重建标准化工作室编码[XX968T-XX89628-XJ668-XT689N]Smart3D系列教程5之《案例实战演练2——大区域的地形三维重建》一、前言Wish3D出品的Smart3D系列教程中,前面一讲说明了小物件的照片三维重建,相信大家对建模的流程有了一定的了解。
这次讲解中,我们将演示说明以一组无人机倾斜摄影照片为原始数据,通过Smart3D建模软件,重建生成三维地形的过程。
与上次不同的是,这次的建模需要对导入的照片预先做一些处理,详情后面会一一说明。
二、工具材料包括Smart3D建模软件,一组垂直拍摄而且多角度、重叠度满足重建要求的航片、航片对应的pos数据文件三、方法步骤关于通过无人机航拍的照片,照片进行三维重建生产模型,一些情况下照片中是自带有GPS数据信息的,而另一些情况则是会导出一组无定位信息的照片和对应的pos数据文本。
前者我们直接新建区块,把照片直接导入给软件跑出结果就ok了。
那么,这次我们主要来谈论研究第二种情况,即照片和pos分开的情况。
(一)区块导入表格的编辑区别于第一种情况我们需要编辑下导入区块的表格,我们将照片的文件路径、参考坐标系、传感器的基本信息等信息嵌入到这个表格里,通过它来实现对照片和pos信息数据的导入。
后面的操作处理是跟直接导入照片的方法是没有差别的。
首先,我们看到原始数据的文件夹如下图所示,包括一组照片和相应的pos文件:可以看到,这个pos数据是以文本文档的形式存在:而在导入区块的过程当中,我们需要导入Excel表格,那么,这时需要运用一定的办公软件的技巧将其转换为Excel表格,这个表格需要包含如下图的4个工作表:结果如下:Photogroups工作表中,名称列需要与照片工作表的PhotogroupName一致:Photos工作表的编辑结果如下图:控制点工作表中,由于无人机航拍的区域不是很大,且对于建模成果的精度没有设定范围,追求建成模型的速度,我们本次先不设控制点,很多朋友都是误把照片放到了这个工作表中,致使处理出现问题,需要注意一下。
三维地质孪生建模流程

三维地质孪生建模流程Three-dimensional geological twin modeling is a critical process in the field of geology. It involves the creation of a digital representation of the subsurface geology using various data sources such as borehole logs, seismic data, and remote sensing imagery. Through this process, geologists can better understand the structure and composition of the earth's crust, which is essential for various applications such as resource exploration, environmental assessment, and geotechnical engineering.三维地质孪生建模是地质领域中一个重要的过程。
它涉及利用各种数据来源,如钻孔记录、地震数据和遥感图像,创建地下地质的数字表示。
通过这个过程,地质学家可以更好地了解地壳的结构和组成,这对于资源勘探、环境评估和岩土工程等各种应用至关重要。
One of the key benefits of three-dimensional geological twin modeling is its ability to provide a visual representation of the subsurface geology. By creating a 3D model, geologists can explore the spatial relationships between different geological units, faults, and fractures, which is not possible with traditional 2D maps. Thisenhanced visualization helps in interpreting the geology more accurately and making informed decisions for various geological activities.三维地质孪生建模的一个关键优势是它能够提供地下地质的可视化表示。
如何使用全景摄影测量技术进行三维地形建模

如何使用全景摄影测量技术进行三维地形建模全景摄影测量技术是一种利用高分辨率相机和地形特征点识别算法,通过拍摄一系列连续的图像来获取地形信息的方法。
它结合了摄影测量和计算机视觉技术,可以用于三维地形建模、遥感影像处理、环境监测等领域。
本文将介绍如何使用全景摄影测量技术进行三维地形建模的步骤和注意事项。
首先,进行地形建模前需要选择适当的全景摄影测量设备。
常见的设备包括全景相机、无人机和车载摄像设备。
选择设备时需要考虑到拍摄范围、分辨率、精度、便携性等因素。
第二,确定地形建模的区域和范围。
根据需求和实际情况,确定地形建模的范围,可以是一个特定的山岳地区、一座城市或一个园区。
根据建模范围的大小和复杂程度,决定选择合适的摄影参数和拍摄策略。
第三,进行地形拍摄的前期准备。
这一步包括确定拍摄时间、天气条件、地形特征点的标定等。
选择适当的拍摄时间和天气条件可以提高图像质量和地形特征点的识别效果。
地形特征点的标定是为了提供参考点和坐标系,方便后期处理。
第四,进行现场拍摄。
根据预先确定的拍摄策略,使用设备进行拍摄工作。
全景摄影测量一般采用连续拍摄的方式,即相机以一定的角度和位置进行连续拍摄,然后通过图像处理算法进行特征点的识别和重建。
第五,进行图像处理和地形重建。
将拍摄得到的图像传输到计算机中,利用图像处理算法和地形重建软件进行数据处理和模型构建。
图像处理包括图像校正、去除噪声、特征点提取等步骤,地形重建包括点云生成、三角网格建模、纹理映射等步骤。
第六,进行地形建模的验证和优化。
通过与实际地形进行对比,进行建模结果的验证,并根据需要进行优化。
验证的方法可以是对地面特征进行实地测量,对地物边界进行对比等。
最后,进行地形建模结果的应用。
地形建模的应用包括地质勘探、城市规划、环境监测、军事模拟等领域。
根据实际需求,将建模结果应用到相应的领域中,为决策和规划提供支持。
需要注意的是,全景摄影测量技术虽然可以获取高分辨率的地形信息,但在使用过程中还是存在一些问题和限制,如遮挡问题、光线条件不佳等。
如何使用测绘技术进行三维地理信息建模
如何使用测绘技术进行三维地理信息建模引言:随着科技的进步和数字化时代的来临,三维地理信息建模成为了一个不可忽视的重要领域。
在城市规划、环境监测、土地管理等众多领域,三维地理信息建模都扮演着重要的角色。
而测绘技术作为三维地理信息建模的基础工具之一,其在实现精确而高质量的三维模型方面发挥着重要作用。
一、概述:测绘技术是指利用各种仪器设备进行地理空间数据的测量、采集、处理和分析的一门学科。
在三维地理信息建模中,测绘技术主要负责获取地理数据的精确位置和形状信息。
测绘技术的主要手段包括全球定位系统(GPS)、航空摄影测量、激光雷达测量等。
二、全球定位系统(GPS):全球定位系统是一种使用人造卫星进行精确定位的系统。
在三维地理信息建模中,GPS主要用于获取地物的空间坐标和位置信息。
借助于GPS,测绘人员可以准确地捕捉和记录地物在三维空间中的位置。
这为后续建立三维地理信息模型提供了基础数据。
三、航空摄影测量:航空摄影测量是通过飞机或其他航空器进行影像采集和数据获取的测绘技术。
在三维地理信息建模中,航空摄影测量可以提供大面积的高分辨率影像数据,可用于建立真实而精确的三维地理信息模型。
通过航空摄影测量,我们可以获取地物的高程信息、建筑物的外部形状等。
这些数据将为后续的三维地理信息建模提供重要的基础。
四、激光雷达测量:激光雷达测量是一种利用激光束进行测量和数据采集的测绘技术。
激光雷达通过发射激光束并测量其返回时间和强度来获取地物的准确位置和形状信息。
在三维地理信息建模中,激光雷达测量可以提供极高的精度和分辨率。
借助于激光雷达技术,我们可以获取地面、建筑物、森林等地物的精确三维信息。
这些数据对于建立细致的三维地理信息模型非常关键。
五、数据处理和建模:在进行三维地理信息建模之前,测绘人员需要对采集到的数据进行处理和分析。
这包括数据去噪、数据拼接、数据配准、3D重建等步骤。
通过使用计算机图形学和计算机视觉等技术,测绘人员可以将采集到的数据转化为真实可靠的三维地理信息模型。
基于X3D的地形可视化方法与实现的开题报告

基于X3D的地形可视化方法与实现的开题报告一、研究背景及研究目的地形可视化是计算机图形学领域的一个重要研究方向,它主要研究如何用计算机图形学的技术手段来构建地球表面的三维模型,并对其进行可视化处理,使用户可以通过虚拟现实技术来感受地形的真实感。
地形可视化的应用范围广泛,对于地质勘探、城市规划、交通规划等领域都有着重要的作用。
近年来,随着X3D技术的发展,基于X3D的地形可视化方法已经成为了研究的热点之一。
X3D是一种基于XML的3D图形标准,它可以用于构建高质量的交互式3D应用程序,并且具有高度的可扩展性,因此被广泛应用于虚拟现实、游戏开发、虚拟场景等领域。
本次研究的主要目的是研究基于X3D的地形可视化方法,并实现一个基于X3D技术的地形可视化系统,该系统可以对地球表面进行高度精确的建模,并支持用户交互、实时渲染等功能。
二、研究内容及方法本次研究的主要内容包括以下几个方面:1. 地形数据预处理:收集地形数据,对其进行处理和优化,获取高精度的地形数据,以便后续的地形可视化处理。
2. 地形数据建模:借助X3D技术,构建高度精确的地球表面三维模型,包括地形特征、地貌、水系等。
3. 地形可视化处理:利用X3D技术对地形数据进行可视化处理,包括线框显示、纹理映射、光照处理、雾化效果等。
4. 地形可交互性设计:基于X3D技术,设计地形可交互性,支持用户的交互操作,包括视角控制、模型选择、动画演示等。
研究方法主要是基于文献综述和案例分析,结合实验室已有的技术积累和实践经验,设计和实现一个基于X3D技术的地形可视化系统,并对系统进行评估和测试,验证其效果和性能。
三、研究意义和创新点本次研究的意义在于,通过基于X3D的地形可视化方法,实现一个高度精确、真实感强、交互性好的地形可视化系统,可以为地质勘探、城市规划、交通规划等领域提供有力的支持,对于推动虚拟现实技术的发展也具有一定的参考价值。
本次研究的创新点在于:1. 基于X3D技术,利用现有的地形数据,构建高度精确、真实感强的地球表面三维模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
X D并不是 一 个 全 新 的标 准 , 是 V ML的 继 3 它 R
所 需 原则采 纳 规格 的特 定部 分 。
2 三 维虚拟 场 景构 建环 境
2 1 X D 实 现 机 制 . 3
承 。X D能 提供 标 准 V ML 7浏 览器 的全 部 功 能 。 3 R 9 X D的主 要 任 务 之 一 就 是 建 立 一 个 更 加 简 化 的 核 3 心 , 现 V ML 7的全部 功能 , 实 R 9 它把 V M R L的功 能封
第 5期 20 0 8年 1 2月
矿 山 测 量
MI NE URVEYI S NG
No 5 .
De . o c 2 o8
基 于 X D的 大 规 模 三维 地 形场 景构 建 3
徐 雷 赵 立科。 李 成 。 ,
( .中国矿业 大学 资源与地球科 学 学院 , 苏 徐 州 2 10 ;.江苏省地质调 查研 究院 , 苏 南京 2 0 l ) 1 江 2082 江 l0 8
摘要: 虚拟现 实技 术 已广泛应 用杜 会 各 个领域 。X D作 为 V L语 言的 继承 版 本 。 3 MR 增加 了很 多新 的
特 点 。文 中以 x D建模 为 工具 , 分析 了 X D 的特 点 和 语 法 的 基础 上 , 合现 有 的虚 拟 现 实技 术 3 在 3 结
对 大 范围三 维虚 拟 场景 的开 发原 理和技 术进 行 了研 究 。最后 给 出 了一 应 用 实例 。
压 缩 的二进 制格 式 。XML编 码允 许平 滑地 用 于 网络
据 的 传 递 。 压 缩 的 跨
二进 制 编码 能支持 更 大 的数据 吞 吐 量 。每 一 种 编 码 都有 对应 不 同 用 户 优 势 , 有 的数 据 编码 都 支 持 完 所 整 的 X D特 征集 。 3
』I ●
I
■
语法分析鼻
r
^I P
1 r
V码 =码 XL 编 L 螺制 桷 R 进 M M 码
l E I I ^ l
I l I
()3 2 X D支 持 多 种 文 件 编 码 , R 9 , ML和 V ML 7 X
:
新节 凛耋 结构 l
面 的体现 : 每个 模块 分 别对 应一 个 功 能 , 中问模 块 得 到下 层模 块 的 支 持 并 对 上 层 模 块 提 供 服 务 , 个 模 每
块 又 可 以进 一 步分 成若 干子模 块 , 图 1 示 。 如 所
XF L件漉件 3R 文、文 DM 4
●
l 豫事 I b 件 l
一
f 场圈据构 景数结 ●
图 l X D实 现 机 制 3
事翻 l 件
I
个 严格 的规 则集来 执 行 自定 义的 扩展 。
() 3 4 X D标 准被 分割 为 3个独 立 的规 格 , 即抽 象
43
第 5期
矿 山 测 量
20 0 8年 1 2月
式。
X D 的实现 机制 是一 个典 型 的 三层 结 构 。处 于 3
中 间层 的.3 X D浏 览 器 的 整个 场 景 构 建 的 核 心 , 负 它
责生 成场 景 图 和 事 件 图 。 向上 接 受 文 件 并 对 用 户 的
操作 做 出反 映 。组 件 思 想 在 X D结 构 图 中得 到 全 3
原 和 晨 x 节 樊 拟 扩 3 点 l D
I
I本 慢 奢 如 ■ 螺 浯‘:
原 型
型 I l
J M p m E ^ i c t ,
I 场生船 l 景成
▲ I
( )X D 通 过 使 用 模 块 化 的 结 构 来 实 现 3 3
V ML 7的 扩展性 。X D组 件 机 制也 允 许 用 户 根 据 R 9 3
2 2 虚 拟 场 景 的 三 维 建 模 .
浏览 器 中浏览 进行 浏览 。
场 景 的建模一 般 采用 基 于 图像 的建模 (mae— I g
b sdMo e n ) ae dl g 和基于 图形 的建模 ( rp is ae i G ahc —b sd
Mo e n ) 种方 式 。前 者 的存 储 文 件 较 大 , 利 于 dl g 两 i 不
关键 词 :可 扩展 3 D;虚 拟现 实 ; 大规 模 地 形 ;三 维场景 . 中 图分类 号 : 2 9 P0 文献 标 识码 : B 文章编 号 :0 l一 5 X( 0 8 0 0 4 0 10 3 8 2 0 ) 5— 0 3— 3
1 X D概 况及 技 术优 势 3
概 念 和结 构 、 文件格 式 编码 、 程 语 育存 取 。 这种 途 编
装 到 一 个轻 型 的 。 扩 展 的核 心 之 中 。X D致 力 于 可 3 建 立一 个 三 维 图 形 与 交 互 多 媒 体 的 统 一 的 交 换 格 式, 这种 格式 要能 达到 像 H ML或 X T ML那样 的标 准 性 和可 扩展性 。X D 相 对 V ML改进 , 供 了 以下 3 R 提 的新 特性 : 更先 进 的应用 程 序 界 面 , 添 的数 据 编 码 新 格式 , 格 的一致 性 , 件 化 结 构 ( 来 允 许 模 块 化 严 组 用 的支 持标 准 的各部 分 ) 。 … 下 面给 出了 X D技术 标 准 的几点 优 势 : 3 ()3 1 X D有 一 个 统 一 的 应 用程 序 界 面 ( p l a A pi ・ c t nPo rm e n r c ,A I , V ML 7使 用 内 i rga m r t f e P ) 而 R 9 o Iea 部脚 本 A I 上 外 部 A I 二 者 采 用 不 同 的 编 程 模 P加 P, 型 。X D统 一 的 A I 以建 立更 强 更 可靠 的执 行方 3 P可