由PC/104控制的跟踪雷达天线控制系统
一种基于PC/104的天线伺服模糊控制方法

设 计方 法去 设 计 的伺服 系统 , 想提 高其 对 指令 若
响 应 的快 速 性 能 , 附 带 产 生 比较 大 的超 调 , 会 甚
至会 出现伺 服 系统 极需 避 免 的震荡 , 里我们 引 这
入模糊 控 制 的方法 , 利 地解决 了这个 问题 。 顺
1 P 1 4简介 C/ 0
P /0 是 一 种 高 度 集 成 、自 栈 结 构 、 C, 4 l 与
制信 号 的大 小和 正 负 , 而使 天 线在 电机 的驱动 从
下 完成 各种 战 术 动 作 或 者 到 达 指 令 位 置 。在 该 系统 中采用 一般 的 二维模 糊 控制 , 天 线 的位置 将 误 差和 位置误 差 的 变 化量 作 为模 糊 控 制 的输 入 量 , 模 糊 量 化成 为模 糊 量 , 经 模 糊 控 制 规则 经 再 推 理得 到模 糊控 制 量 , 反 模糊 化处 理 后转 换为 经 精 确 的速度 控 制量 , 通过 电机去 控 制天 线 的运行 速 度 , 而 使天 线更 好地 服 务 于系统 。 从 当位 置误差大 于规定 值 E 时 , 其输 出控 制量 己= , 或 己 = 一 诅 , 要 目的是 提 高 系统 的 , x主 l M —P A 完 全 兼 容 的嵌 入 式 微 机 C U 模 B C/ T P 块, 可方 便 地与 其他 周 边设 备及 模块 构成 完 整 系
维普资讯
第 3期
杨 爱军 :一种基 于 P / 0 C 1 4的 天线伺 服模 糊 控制 方法
1 1
图 1 原 理 框 图
3 模 糊 控 制 器 的设 计
本 系统 采用 iA a dB te 的模 糊 调 整 f n h n C
雷达天线伺服控制系统要点
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
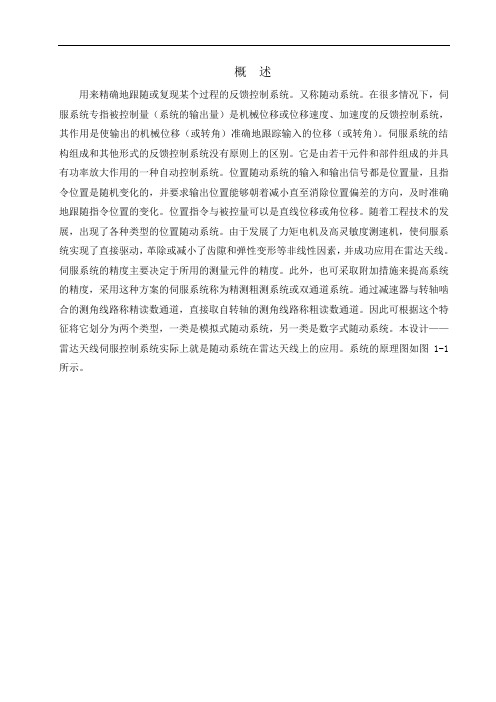
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
天线与天线系统

0609114光纤CATV 传输系统的结构和应用〔刊,中〕/许广华//光纤与电缆及其应用技术.—2005,(6).—8210(G ) 光纤CA TV 传输系统包括光发射机、光接收机、光纤和必要的光通路器件(如光分路器、光纤连接器)等。
该系统采用光纤/同轴电缆混合网(HFC)结构,是一种宽带、低成本的实现方式。
结合实际开发工作,简要介绍了光发射机、光接收机及相关器件的工作原理。
参11143 波导、天线馈源0609115基于固定实镜像平面波展开的快速多极子方法计算微带结构问题〔刊,中〕/李磊//电子学报.—2005,33(12).—215322156(E )0609116六极铌酸锂波导二次谐波产生=Second 2har monic gen 2eration in hexag onally 2poled lithium niobats siab waveg 2uides 〔刊,英〕/K.G allo ,R.T.Brattalean//E lectronics Letter s.—2003,39(1).—75(E )0609117圆形介质棒波导漏模分析=Analys is of lea ky modes in circula r dielectric rod waveguides 〔刊,英〕/K i Y oung K im Heung 2Sik Tae//Electronics Letters.—2003,39(1).—61(E )0609118PECVD 制备不同指数对比硅上硅石波导=D iff erent index contrast s ilica 2on 2silicon waveguides by P ECVD 〔刊,英〕/Haiyan Ou//E lectronics Letters.—2003,39(2).—212(E )0609119采用空间孤立子的LiNbO3重构单模信道波导构成=Formation of reconfigurable singlemode channel waveg 2uides in LiNbO3us ing spatial s olitons 〔刊,英〕/G .C ou 2ton ,H.Maillotte//E lectronics Letter s.—2003,39(3).—286(E )0609120低损耗TiO 2/Or mosil 平面波导的制备及表征=Prepa 2ration and Characterization of TiO 2/Ormosil Planar Waveguide with Low Attenuation 〔刊,中〕/王宝玲//上海大学学报(英文版).—2005,9(6).—4892492(E ) TiO 2/ormosil plana r waveguide was prepared by s ol 2gel method at low thermal treatme nt tem perature (<200℃).Scanning electron microscope ,F T 2IR s pectrom 2eter ,spectroph otometer ,atomic force microsco p y ,ther 2mal analyzer ,and dar k m 2line spectroscopy were used with the method of s cattering 2detection to investigate op 2tical and structural properties.H igh optical quality f T f f 56B f 63R f 0609121任意截面形状介质填充波导高次模求解的快速边缘元算法〔刊,中〕/彭朕//电子学报.—2005,33(12).—214922152(E)1150 天线与天线系统0609122高功率微波在等离子体填充波导中的传播特性〔刊,中〕/傅文杰//强激光与粒子束.—2005,17(12).—185221856(E ) 在考虑有质动力情况下对高功率微波在等离子体填充波导中的传播特性进行了理论分析和数值计算,研究了高功率微波在等离子体中的传播特性和微波场强与等离子密度之间的关系。
王划一自动控制原理1-1绪论-文档资料
生的。这使得这种“水位恒定的要求”变得难以实现
了。
所谓控制就是强制性地改变某些物理量(如上例
中的进水量),而使另外某些特定的物理量(如液面
高度h)维持在某种特定的标准上。
这人种工人控为制的例流入子。
地强制性地改
变进水量,而 使液面高度维
水箱
持恒定的过程,
h
即是人工控制
流出
过程。 8
1.2.2 自动控制的定义及基本职能元件
般用r(t)和c(t)表示。
c(t)
r(t)
0
t
0
t
29
2.离散系统
控制系统中只要有一处的信号是脉冲序列或数码 时,该系统即为离散系统。这种系统的状态和性能一 般用差分方程来描述。实际物理系统中,信息的表现 形式为离散信号的并不多见,往往是控制上的需要, 人为地将连续信号离散化,我们称其为采样。
c(t)
人本身就是一个具有高度复杂控制能力的闭环系 统。比如,人可以用手拿到放在桌上的书等物,体现 了闭环控制的原理。
直流电动机转速闭环控制的例子。 19
电动机
负载
电 位 器
功率 放大器
M
给定 位置
F 测速发动机
负载 扰动
电位器 ur +- e
uf
功率 ua 放大器
转速 电动机
测速发动机 20
闭环控制的特点: ① 控制作用不是直接来自给定输入,而是系统的偏 差信号,由偏差产生对系统被控量的控制; ② 系统被控量的反馈信息又反过来影响系统的偏差 信号,即影响控制作用的大小。这种自成循环的控制作用, 使信息的传递路径形成了一个闭合的环路,称为闭环。 ③ 提高了控制精度。 闭环控制系统的典型方框图如图所示。
雷达原理09年A卷答案

南京理工大学课程考试试卷答案及评分标准(A卷)课程名称: 雷达原理 学分: 3教学大纲编号: 04041901试卷编号: A卷 考试方式: 闭卷、笔试 满分分值: 100+5考试时间: 120分钟常用分贝(功率)换算表:1dB(1.26), 2dB(1.6), 3dB(2), 4dB(2.5), 5dB(3.2), 7dB(5), 8dB(6.3)2(3dB), 3(4.77dB), 4(6dB), 5(7dB), 6(7.78dB), 7(8.45dB), 8(9dB)注意:简答题必须语句完整;推导题和计算题必须要有分步过程及必要的文字说明,直接写出结果最多只得一半分;各题中若出现无文字说明的箭头符号将被扣分一、 填充选择题(15空,每空2分,共30分)1.在以下雷达参数中,( c )对目标雷达截面积的影响最小?(a)波段(b)视角(c)脉冲重复频率(d)极化2.某雷达接收机的输入信噪比为SNR i =10,输出信噪为SNR o =4,则该雷达接收机的噪声系数为 4 dB。
3.在某对空警戒雷达接收信号中,从空中飞机反射回来的电磁波称为( b ),从己方其它同频雷达泄漏过来的电磁波称为( a ),从云层反射回来的电磁波称为( d )(a)干扰(b)目标(c)噪声(d)杂波4.机械扫描 (相位扫描/机械扫描/频率扫描)雷达的最大作用距离将不随扫描角度的变化而变化。
5.单级振荡 (单级振荡/超外差/主振放大/超再生)式雷达发射机的频率稳定度较差,相继发射脉冲之间的相位通常不相参6.以下哪个部件最不可能属于雷达接收机( c )(a)低噪高放(b)混频器(c)脉冲调制器(d)信号处理机7.雷达接收机带宽应 大于 (小于/等于/大于/不确定)该雷达的发射信号带宽8.某雷达工作频率为6GHz,则该雷达属于 C (L/S/C/X)波段9.振幅和差式单脉冲雷达的鉴角特性曲线是 差波束比和波束 (差波束/和波束/差波束比和波束/和波束比差波束)随目标角误差变化的函数关系曲线10.A雷达与B雷达的发射脉冲宽度分别为4μs和6μs,发射信号带宽分别为0.5MHz和1MHz,则A雷达的距离分辨力 低于 (低于/高于/不确定)B雷达11.某车载全相参脉冲雷达的峰值发射功率为P t,脉冲重复频率为f r,工作频率为f0,雷达车以速度v r直线行进,在雷达车正侧方某处有一巨石,测得该巨石的脉冲回波延时为τ,则对雷达接收机来说,该巨石的距离为cτ /2 。
通信工程师:卫星通信题库考点(题库版)

通信工程师:卫星通信题库考点(题库版)1、单选地球站电气性能中的有效辐射功率稳定率为()DB.A.0.5B.2.0C.1.0正确答案:A2、单选数字电视卫星广播缩写为()。
A.DVB.SB.DVB.CC(江南博哥).DVB.TD.DVB.E正确答案:A3、问答题简述VSAT系统主站至端站的数据流程。
正确答案:TDM调制器——上行功率控制器——上变频器——HPA——主站天线——卫星——端站天线——LNB——TDM解调器/SCPC解调器。
4、单选在卫星通信中,长的时延会带来()和()问题。
A.回波干扰、回波抑制B.回波干扰、回波抵消C.回波干扰、话音重叠D.回波抵消、话音重叠正确答案:C5、单选在VipersAt系统中,利用PC进行远端站comtech564多路解调器参数设置时,进入vipersAtconfig,再进入sethomestAte,对4路解调器的STDMAstAte项应设置为()A.DisABleB.EnABleC.N/AD.Yes正确答案:A6、名词解释每路一载波多址联接正确答案:在频分复用制中,每一电话信道都用一个单独的载波传送的多址联接通信方式。
按其终端调制形式的不同又可分为:窄带调频每路一载波,脉码或增量调制-移相键控每路一协波等等多址联接通信方式。
7、问答题已知对方电视载波发信频率为6389.5MHz,DVBS,QPSK调制,FEC=3/4,信息速率S/R=6.1113Mbps,加BISS扰码,请写出用解码器解出电视节目的主要参数设置。
正确答案:1、输入信号选择:RF(LBanD.in2、本振频率设置:0Hz(LBanD./5150MHz(CBanD./10GHz或11.3GHz(KuBanD.3、卫星下行频率设置:根据不同卫星接收天线的工作频段(C/KuBanD.,先设置本振频率,再输入卫星的下行频率。
本题中本振频率设5150MHz,下行频率设6389.5MHz-2225MHz=4164.5MHz。
一种舰载雷达双天线同步跟踪控制

65
信息通信 保持同步,反之,若从天线跟踪,主天线也必须与其保持同步。 当目标丢失时,双天线同步旋转重新进行目标搜索。
图 2 跟踪切换区
2 控制系统设计
主天线和从天线的两轴稳定系统皆采用坐标变换技术在雷 达天线方位和俯仰轴上对舰船摇摆姿态角(纵摇角 P、横摇角 R 和航向角 H)进行角度实时补偿,从而确保雷达天线指向稳定, 在舰船地理坐标系中其方位角 A 和俯仰角 E 计算公式如下[1]:
参考文献:
[1] Contiki OS,http://www.sics.se/contiki
[2] FreeRTOS, [3] Mantis OS, [4] TinyOS, [5] Semtilla,
式中:Ac,天线甲板方位角;E,天线俯仰角;A,天线真方 位;Ec,天线甲板俯仰角;H,舰船航向角;R,舰船横摇角;P,舰 船纵摇角。 2.1 方位闭环控制
方位控制如图 3 所示,方位给定值和真方位之差作为 PID 控制的误差输入信号,PID 校正量与给定值的速度前馈校正量 之和经非线性补偿处理后作为方位控制量[2],此控制量经 D/A 转换后送至方位驱动器,驱动天线方位按指定要求运动。
两轴控制系统的实现方法。
关键词:双天
文献标识码:A
文章编号:1673-1131(2016)09-0065-02
0 引言
舰载雷达在舰上由于受安装位置限制,雷达探测天线因 遮挡存在较大范围的探测盲区,为了消除盲区影响,采用双接 收天线体制,即在舰船左右舷对称位置各安装一个探测接收 天线,从而可实现全方位范围探测功能,其作用相当于将两个 探测天线当作全方位范围内的一个探测天线使用。在双天线 体制下,始终有一个天线为主天线,另一个天线作为从天线与 主天线保持同步,两个探测天线各负责 180°探测范围。
一、全天候雷达测速监控抓拍系统技术要求

扫描方式
逐行扫描
7
动态范围
4096个灰度值(12位)
8
协同工作
软硬件高速协同工作。
9
镜头
有固定聚焦长度的标准镜头
10
聚焦长度
17mm,23mm或35mm
11
快门
电子快门 1/500至1/10000可调
12
控制
快门速度,增益,触发
13
处理系统
PC/104, PCI信息通路,400MHz以上奔腾处理器,256MB以上内存,40GB以上硬盘
8
闪光单元闪光输出300Ws,闪光瞬时电流4.0A,闪光系统(待机)0.5A,瞬时闪光电流80安培(尖峰),灯泡的寿命在全部充满电的状态下至少10000次循环,曝光角度约30度,曝光时间1/1000秒,保证对驾驶员的安全驾驶无影响。
9
系统必须具备高低速测速功能。
设定超高速和超低速抓拍值,系统可对超高速和超低速同时区分并对违法车辆抓拍。
1
电源输入
12伏数码相机(11~14伏直流/2.5安培)
2
图像感应器
CCD图像感应器
3
CCD感光器
彩色或者单色10.2mm×8.3mm高速处理型
4
光学敏感像素
5.0 megapixel彩色2456×2152或以上
5
灵敏度
单色:最高400nm 到900nm
彩色:最高蓝色4Biblioteka 5nm;绿色540nm;红色640nm
3
可同时对多个车道 (3个及4个车道) 进行监控,对违章车辆车道进行定位,并保证在24小时全天候情况下所抓拍的违章照片质量清晰。
4
系统可同时对来向、去向、双向的车辆监控。
5
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
统。
图 2 P 14计 算 机 系 统 连 接 框 图 C/0
P 14同时 完成 了 以前 由复杂 的 硬件 电路 C/0
P /0 C 1 4计 算 机 同 时 控 制 雷 达 天 线 的方 位 角 、 仰 角 驱 动 系 统 。 它 采 用 了数 字 式 坐 标 变 俯 换 , 成 两 轴 稳 定 公 式 及 数 字 式 a— 滤 波 。 完 P /0 C 1 4可 以根 据 操 控 台 的 不 同命 令 , 时 地 从 实 系统 内部 计算 机 网上 获 得 各 种 误 差 传感 器 传 来 的天线 与 目标 的误 差 数据 , P / 0 从 C 1 4总 线 上获 取 天线 的不 稳 定 数 据 , 过一 系列 的坐标 变 换 、 经 反 变换 和滤 波解 算 , 预测 出 目标下 一 时刻 的位置 量 、 度 量 , 天 线 位 置求 差 后 , 经 数 字 P D 速 和 再 I
精度高, 响应 速 度 快 的特 点 。采 用 P / 0 C 1 4计算 机 作 为天线 控 制系 统 的核心 , 宽调 制伺 服功放 脉 作 驱 动 , 不 仅 大 大简 化 了系 统 的硬 件设 计 , 这 节
省 了结构 空 间 , 且能 进一 步提 高天 线控 制 系统 而
的控 制 精 度 以及 系统 的可 靠 性 、 活性 , 小 系 灵 减
舰 船 电 子 对 抗
板母 板 中 , 过 印制板 上 的总 线和 一些外 围电路 通
第2 5卷
制特性 。 软件 中还 引入 了积 分 分 离 法 解 决 超 调 大 的 问题 , 实际选 取域 值 e≤ 0 6较 为 合适 。 k .。 P /0 C 1 4在 进 行 角 度 控 制 的 同 时 , 实 时 地 还 查 询 由 自检 电路 送 来 的伺 服 各 功 能模 块 的 工 作 状 态 及故 障信 息。 根 据 预先 设 定 好 的优 先 级 别 做 出相应 的处 理 , 并送 雷达操 控 台显 示 。遇 到较
收 稿 日期 : 0 1 l 2 2 0 一l 一 0
P / T体 系 , CA 采用 “ 自栈 式 ” 线 结构 , 总 功能 模块 化 。由于 其结构 尺寸 小 ( 只有 9 x9 0mm 6mm) ,
所 以系统将 4块 P /0 C 1 4组 件 安 装 在 l 印制 块
维普资讯
维普资讯
第2 5卷第 4期
舰 船 电 子 对 抗
20 , 54 : 7 2 0 2 2 () 2 - 9
由 P 1 4控 制 的跟 踪 雷达 天 线 控 制 系统 C/ 0
宦 昱
( 舶 重 工 集 团公 司 73所 , 州 2 5 0 ) 船 2 扬 2 0 1
统响 应时 问 。
2 系 统 工 作 原 理
本雷 达 天线 控 制 系统 ( 以下 简 称 天 控 系 统 )
图 1 方 位 角 控 制 系 统 方 框 图
2 1 P /0 , C 14计算 机 系统
本 雷 达 天 控 系 统 应 用 P /0 C 1 4作 为 伺 服 控 制 的核心 。 P / 0 C 1 4在 软 件 、 件 上 兼 容 标 准 的 硬
摘要 介绍一种采用嵌入式计算机 P /0 、 C 14数字化轴角编码器以及 P WM脉宽调制型伺服功放组
成 的舰 载 跟 踪 雷 达 天 线 控 制 系 统 , 出其 组 成 原 理 和 实 现 方 法 。该 系 统 控 制 灵 活 、 踪 精 度 高 、 机 界 面 给 跟 入
友好。
关 键词
天线 的方 位角 、 俯仰 角 。高 速直 流伺 服 电机作 为
执行 机构 通过 齿轮 传动 , 动天 线运 动完 成 实时 带 跟踪 目标 的 功 能 。系 统 由位 置 环 、 度 环 、 速 电流 环三 环 构成 。 电流 环 能 使 系 统 以允 许 的 最大 电 流加 速启 动 、 动 , 而获得 较 快 的响应 速度 , 制 从 同 时能 减 小 电 网的 波 动对 系统 的影 响 。速 度 环 由 直接 套在 电机 轴 上 的直 流 测 速 发 电 机 的输 出经 滤 波 匹配 网络 闭环 , 系 统能 平稳 地调 速 、 使 稳速 , 提 高 环路 的硬 度 和 抗 干 扰 能 力 。 由轴 角 编码 器 1 Z Z 4 B实 时接 收天 线方 位 、 2 S39 俯仰 同步机 的输 出电压 , 并转 换成 数 字 量 送 入 P 1 4计 算 机 进 C/0 行 位 置 闭环 。图 1 方 位角 控制 系统 的方 框 图。 是
校 正 , D/ 输 出至 伺 服 系 统 的速 度 环 。 为 了 送 A
完 成 的如天 线位 置精 粗数 码 的组合 、 位 支路接 方 收机误 差 的正 割补偿 等许 多 功 能的算 法 。
将它 们有 机地 连在 一起 , 成 1个完 整 的计算 机 形 系统 。 这 4块 模 块 是 : C 1 4电 源 模 块 , P P /0 C U 模 块 , D接 口模 块 , A 接 口模 块 。其 系统 连 A/ D/
接框 图如 , 如 电机失 速 , 电机失 磁 等故 障 , C 1 4会立 即停 止 天线 运转 , 断 主 电 P /0 切
天线控制
脉宽调制
P /0 C 14
1 概 述
舰 载火 控 跟踪 雷达 主要 用来 准确 、 快速 跟踪 空 中的飞行 目标 、 海低 空 飞行 的小 目标 以及海 掠
面上 的舰 艇 。雷 达 的 天线 控 制 系统 应 具 有跟 踪
由 2套 基本 相 似 的伺 服 系统 组成 , 别控 制 雷达 分