雷达天线测向与定位控制系统
雷达
3.雷达假回波 (1)旁瓣回波 只有近距离反射雷达电磁波能力很强的物标,对旁瓣发射的电磁波 能量反射较强时,才有可能在雷达荧光屏上出现旁瓣假回波。 旁瓣回波的特点:在真回波的相同距离位置左右出现对称的假回 波,回波强度比真回波弱的多。 消除旁瓣回波的方法是调节“增益”旋钮或使用“海浪干扰抑制” 旋钮,降低回波强度。
(4)明暗扇形干扰回波 当雷达使用“自动频率跟踪(AFT)”时,若自动频率跟踪电路失调, 雷达荧光屏上将出现有规律的明暗扇形干扰回波。 消除方法:将“自动频率跟踪”转换为“手动频率跟踪”。 (5)背景噪声干扰(草波)回波 当雷达的视频放大倍数太大、物标回波太强等原因,使雷达荧光屏上回波处 电子辐射出后又重新落回到回波附近,使回波变大,造成荧光屏上出现成片的背 景噪声干扰回波。 可以通过调扫描亮度和调小增益的方法,消除背景 噪声干扰回波,但不能影响小物标回波的观测。
原因:是大气中存在一层温暖的反射层(逆温层)。
三、雷达回波识别 1.定位物标回波识别 可以用于雷达定位的物标主要有孤立的小岛、岬角、突出陡峭的海 岸、雷达应答标(racon)等。其回波的主要识别方法有: (1)根据雷达荧光屏上物标回波形状与海图上物标形状比较进行识 别。 直观,简便易行。 (2)根据已知准确船位识别。 准确,操作复杂。 (3)根据雷达航标特点识别。 直观,准确,识别方便。
6)雷达电磁波的异常传播
雷达电磁波的异常传播是在特殊环境和特殊大气条件下的传播特性。
(1)分折射(二次折射) 雷达电磁波折射系数减小,使传播方向上翘, 雷达地平能见距离减小的 现象称为分折射。 原因:在冬季冷空气移到温度较高的海面上,温差大(20℃以上),气温随高度激烈 下降或大气中相对湿度增加。 (2)过折射(超折射) 雷达电磁波折射系数增加,使电磁波的传播方向向下弯曲,雷达能见地平距离增 加的现象称为雷达电磁波的过折射。 原因:在夏季干燥的暖空气移到水温较低的海面上时,气温随高度下降变化 剧烈或相对湿度降低。 (3)大气波导 大气波导是雷达电磁波过强的超折射,形成大气层与海面循环往复的折射传 播现象,可使电磁波能量传播的很远。
雷达天线控制系统工作流程
雷达天线控制系统工作流程Radar antenna control systems are an essential part of radar technology. 雷达天线控制系统是雷达技术中不可或缺的一部分。
These systems are responsible for accurately positioning and controlling the radar antenna to ensure optimal performance. 这些系统负责精确定位和控制雷达天线,以确保最佳的性能。
The workflow of a radar antenna control system involves several key steps that are vital to its successful operation. 雷达天线控制系统的工作流程涉及几个关键步骤,对于其成功运行至关重要。
From receiving input signals to transmitting processed data, the system must seamlessly and effectively manage the entire process. 从接收输入信号到传输处理后的数据,系统必须无缝地并有效地管理整个过程。
The first step in the workflow of a radar antenna control system is to receive input signals from the radar system itself. 在雷达天线控制系统的工作流程中,第一步是从雷达系统自身接收输入信号。
These signals contain important data about the target being tracked and provide the necessary information for the control system to make accurate adjustments. 这些信号包含了被追踪目标的重要数据,并为控制系统提供了进行准确调整所需的信息。
雷达天线

雷达天线雷达用来辐射和接收电磁波并决定其探测方向的设备。
雷达在发射时须把能量集中辐射到需要照射的方向;而在接收时又尽可能只接收探测方向的回波,同时分辨出目标的方位和仰角,或二者之一。
雷达测量目标位置的三个坐标(方位、仰角和距离)中,有两个坐标(方位和仰角)的测量与天线的性能直接有关。
因此,天线性能对于雷达设备比对于其他电子设备(如通信设备等)更为重要。
主要参量雷达天线的主要参量有方向图、增益和有效面积。
方向图雷达天线具有一定形状的波束。
由于波束是立体的,常用水平截面的波束形状(即水平方向图)和垂直截面的波束形状(即垂直方向图)描述。
方向图呈花瓣状,故又称波瓣图(图1)。
常规方向图只有一个主瓣和多个副瓣。
副瓣电平通常低于主瓣20分贝以上,这样才可能用主瓣来分辨目标的方位和仰角。
主瓣半功率点(0.707场强点)间的宽度称为波束宽度。
增益雷达天线在最大辐射方向所辐射的功率与一假想的各向均匀辐射的天线在同一方向辐射的功率之比(其条件为两天线输入的功率相同)。
增益G 表示雷达天线在发射时聚束的能力。
有效面积雷达天线接收到的信号功率与来自最大辐射方向的信号的功率密度之比,即天线接收到的信号功率Pr=S×Ae。
式中S为信号功率密度;Ae为天线有效面积,表示雷达天线在接收时捕获空中信号的能力。
由互易定理可证明G=4πAe/λ2,式中λ为信号波长。
对一定形式的天线,天线有效面积Ae与实际几何面积A 成正比,即Ae=ηA。
式中η为利用系数,一般小于1。
雷达天线设计的主要问题是:①提高天线增益和有效面积,以加大雷达探测距离;②压低天线副瓣电平,以减小测向模糊和提高抗干扰能力;③提高波束扫描速率,以便能同时观察多个目标;④展宽天线系统工作频带,以提高反有源干扰的能力;⑤采用多种技术提高测角精度。
搜索雷达天线搜索雷达又称警戒雷达,用于及时发现远距离目标。
搜索雷达天线相当大,面积一般为数十至数百平方米。
探测距离达几千公里的预警雷达的天线面积可达几千或几万平方米。
XDR天气雷达控制系统调试与天线标定方法
XDR天气雷达控制系统调试与天线标定方法作者:陆卫冬魏旭辉来源:《农业开发与装备》 2015年第9期陆卫冬1,魏旭辉2(1.新疆维吾尔自治区人工影响天气办公室,新疆乌鲁木齐 830002;2.新疆维吾尔自治区人工影响天气办公室,新疆乌鲁木齐 830002)摘要:全疆共有十余部XDR-X波段数字化雷达,目前是新疆人影观测与作业指挥重要装备,在人影防雹、增水作业中发挥着极为重要作用。
阐述了XDR-X波段天气雷达天线控制系统与整机调试方法。
关键词:XDR天气雷达;控制系统原理;调试;标定引言XDR天气雷达工作原理是利用物体对电磁波的散射作用来对云、雨、雹等进行观测的。
当雷达天线发射出去的电磁波在空间传播时,若遇到云、雨、雪、雹等目标物,就有一部分电磁波会被散射回来,并被雷达天线接收。
根据散射回来的电磁波确定出这些目标物的位置和判断云中的含水量或降水强度,帮助我们了解云和降水的性质和结构。
为了实现天气人影雷达正常工作,必须对雷达控制系统进行调试和有效标定,从而达到精确观测指挥作业的效果。
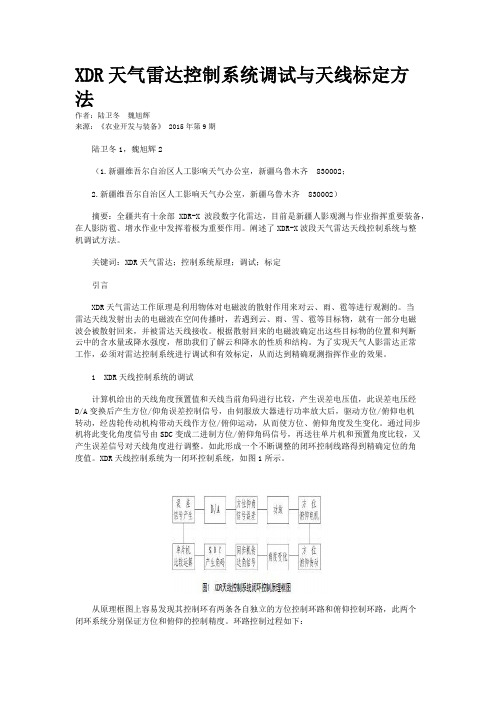
1 XDR天线控制系统的调试计算机给出的天线角度预置值和天线当前角码进行比较,产生误差电压值,此误差电压经D/A变换后产生方位/仰角误差控制信号,由伺服放大器进行功率放大后,驱动方位/俯仰电机转动,经齿轮传动机构带动天线作方位/俯仰运动,从而使方位、俯仰角度发生变化。
通过同步机将此变化角度信号由SDC变成二进制方位/俯仰角码信号,再送往单片机和预置角度比较,又产生误差信号对天线角度进行调整。
如此形成一个不断调整的闭环控制线路得到精确定位的角度值。
XDR天线控制系统为一闭环控制系统,如图1所示。
从原理框图上容易发现其控制环有两条各自独立的方位控制环路和俯仰控制环路,此两个闭环系统分别保证方位和俯仰的控制精度。
环路控制过程如下:由计算机送来的控制角度(方位/仰角)通过并行接口进入天线控制板与天线当前方位/仰角角码进行比较运算,产生误差控制量,经D/A变换后输出,送到天线控制放大器进行脉冲调宽式放大(放大器电源由方位电枢/激磁变压器和俯仰电枢变压器供给)。
雷达的方向测量和定位
4.多波束测向技术
多波束测向系统由N个同时的窄波束覆盖测向范 围AOA,它有两种形成方法: •集中参数微波馈电网络构成的多波束天线阵; •空间分布的馈电构成的多波束天线阵.
3.2 振幅法测向
• 全向振幅单脉冲测向 • 多波束测向
1.全向振幅单脉冲测向技术
全向振幅单脉冲系统使用N个相同方向图函数的天
线,均匀分布到360度方向.四天线全向振幅单脉冲原理如
图
带通滤波器
射频放大
检波
对数放大
带通滤波器 带通滤波器
射频放大 射频放大
检波 检波
对数放大
信 号
对数放大
处 理
带通滤波器
F K () N r 0 1 U r e j2 N r K U N r 0 1 e j(2 N r K W c o 2 N r s )(K N 2 1 , ,N 2
线性相位多模圆阵测向续
其 中W=2R/. 上 式可以 用 贝塞 耳函 数近 似, 即系统的馈电网络 Bulter矩阵为:
BBS.21RD研发社区
第3章 雷达的方向测量和定位
第3章 雷达的方向测量和定位
3.1 概述 3.2 振幅法测向 3`3 相位法测向
3.1 概述
目的 方法 主要技术指标
1. 测向的目的
❖ 信号分选识别 ❖ 引导干扰 ❖ 指示威胁方向 ❖ 引导杀伤武器 ❖ 辅助定位
2.测向的方法
1根据测向原理测向方法分为:
可见,波束越窄、天线越多,误差越小.但波束越窄交 点损失L越大.给定的交点损失LdB,波束宽度为:
雷达天线伺服控制系统讲解

概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图1.2 系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
GNSS双天线定位定向系统.doc
北京七维航测科技股份有限公司利用载波相位测量技术和优化的算法研制开发了基于bdgps的双频双系统定位定向系统它克服了陀螺寻北仪动态性差操作复杂磁罗盘精度低响应慢抗干扰性差不易安装以及单频接收机定向抗干扰性能差等缺点产品具有测量精度高稳定性好无漂移无累积误差不受磁变化影响等特点
GNSS双天线定位定向系统
时间精度
20ns RMS
速度精度
0.03m/s RMS
天线输入阻抗
50Ω
通信参数
串口
2个 RS232/RS422
波特率
2400~912600bps
I/O口
2个PPS、2个MARK IN、1个VARF
电气指标
输入电压
9~30V
电线电压输出
5V DC
启动电流
6.0A 少于60us(典型值)
环境指标
工作温度
SBAS: 0.6m
SP: 1.2m(rms)
SBAS: 0.6m
航向精度
0.6° RMS@0.5m基线
0.3° RMS@1m基线
0.15°RMS@2m基线
0.4° RMS@0.5m基线
0.2° RMS@1m基线
0.1° RMS@2m基线
雷达天线控制系统的设计.doc

雷达天线控制系统设计摘要本课题研究的雷达天线控制系统要求具有定位和等速跟踪功能,定位控制要求精度高、响应快,等速跟踪控制要求转速平稳。
早期的雷达天控系统大多采用模拟电路实现,如需调整控制参数时,就要更换控制器中一些元件,同时受环境温度、外界干扰及元件老化等因素的影响,调节器参数都会发生变化,从而影响控制性能。
一般的雷达天线的性能主要取决于其伺服系统的设计水平。
伺服系统的设计包括结构设计和控制设计两部分,这两部分是相互影响紧密耦合的。
一般所采用的设计方法是对结构系统和控制系统先分别设计,然后再根据要求进行调校,这往往会导致产品研制的周期长、成本高、性能差、结构笨重,不能保证伺服系统总体的综合性能最优。
针对雷达天线伺服系统设计中存在的结构设计与控制设计相分离的问题,提出一种结构与控制集成优化设计的模型,即采用手轮控制和电路自动化控制相结合的方式完成。
本文以雷达天线控制系统的研制为背景,设计了系统总体方案。
雷达为机动型远程警戒雷达,天线在圆周360°方位中进行运转工作,在伺服系统中对天线的控制实现远程遥控和人工控制。
工作中为了有效的消除云雨气象杂波的干扰,利用空间电磁场和目标的特性,在伺服系统中对云雨气象杂波的干扰实现线极化和原极化的转换控制。
对于天线360°圆周运转状态,需要通过处理变换并把360°圆周运转的模拟方位信号转换为数字方位信号,同时为雷达各个分系统提供出方位数据;通过方位处理可实现雷达寻北,对方位数据进行自动教北。
天线在架设时应进行升降俯仰控制,通过控制可安全操作升降俯仰。
关键词:雷达,天线,控制,精度,伺服Radar antenna control system designSummaryResearch of radar antenna control system requires a positioning and velocity tracking, positioning control requires high precision and fast response, speed speed tracking control requirements, such as stable. Most of the early days of radar controlled systems used analog circuits, need to adjust control parameters, it is necessary to replace the controller components in and influenced by environmental factors such as temperature, outside interference and component aging effects, changes regulator parameters, thus affecting performance.General performance of radar antenna mainly depends on the level of its servo system design. Design of servo system design including design and control of two parts, interaction between these two parts are tightly coupled. General system design method is used to structure and control system design, respectively, and then adjusted according to the requirements, which often leads to long product development cycles, high cost, poor performance, structure of heavy, cannot ensure the overall performance of optimal servo system. For the radar antenna servo system design of structure and control design of phase separation problem, proposed a model of integrated optimization design of structure and control, using hand wheel completed the combination of control and automatic control circuit.With development of the radar antenna control system in the background of this article, designing the general scheme of the system. Radar-Mobile early warning radar, antennas work running in a circle of 360 ° azimuth, remote control for antenna servo system of control and manual control. In order to be effective in eliminating Cloud and rain weather clutter interference using spatial characteristics of electro-magnetic fields and the target, Cloud and rain in a servo system of weather clutter jamming transition control for linear polarization and the polarization. Aerial 360 °circle running condition, use the transform and simulation of running in a circle of 360 °azimuth direction of signal into a digital signal, while for the radar system with location data through North azimuth radar homing, on North azimuth dataautomatically, to teach. Elevator pitch control should be carried out when the erection of the antenna by controlling the safe operation of elevator pitch. Keywords:Radar,Antennas, Control, Precision, Servo1绪论1.1课题背景及目的进几十年来,天线和雷达都有着惊人的发展,但基本原理没有重大突破。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题 目雷达天线测向与定位控制系统
英文题目Radar antenna direction findingand positioning control system
院 系
专 业
姓 名
年 级
指导教师
2014年 5 月
摘 要
正常雷达天线伺服的控制系统的通用雷达天线伺服请求定位和速率跟踪功效。定位控制精度请求高、反应快、等速跟踪要求运转不乱。雷达权衡间隙实际是丈量脉冲喷射与回波脉冲之间的时间差,因为是电磁波以光速传布,依照这个就能够换算成目标的确切距离。目标位置的测量是用锋利的光束位置测量天线。在仰角波束测量高程测量。目标是根据高度和距离高度计算。测量速度的原理是根据多普勒效应频率之间的相对运动产生的雷达和目标。目的回波频率和雷达辐射频率雷达复苏是不一样的,两者之间的差额称为多普勒频率。从多普勒频率中可以提取的重要动静之一是雷达与目的之间间距的转化率。当在雷达辨别单位存在于统一空间内的方向和干扰波,利用多普勒频雷达是不一样的,它们之间可以从杂波跟踪的干扰和检测目标。
1.4.4
从目标发射无线电波回来,雷达天线来得及从一个位置到另一个位置之前,就已经回到了它。为了从无线电波反射回到学习目标的信息(其范围,高度,距离),必须有一个像蝙蝠的耳朵像那样的东西。在雷达,这部分被称为雷达接收机,它是一个特别敏感的耳朵”。为了使雷达探测范围尽可能,雷达发射机的力量是伟大的。但在无线电波的反射功率的目标,是非常小的。用无线电,对500公里,外面的一个战士,一小部分,它的身体从功率无线电波反射回来的唯一的排放。无线电波反射回雷达天线,并进入雷达接收机,它将减少。小于1瓦特的功率[5]。长期目标反射回的无线电信号是如此之弱,一般要放大数百万倍以上,可在雷达显示器上观察到。这类夸大百万倍的使命将由雷达接收机实现。 雷达接收机和通常超外差收音机是完全相同的原则。但它不受介质、不同的短波无线电信号,但从雷达信号接收的反射超短波或微波[6]。因为是雷达的工作频率过高,所以高频信号直接夸大数百万倍,这是不容易做到因此,信号进来接收机后,务必最初把它的频率转变,是从更高的超短波或降低到一个较低的中频微波频段的频率,这就是所谓的频率。信号的频率降低,经过多次级包括晶体管或由管放大再放大,使您可以轻松地达到数百万倍放大。频率和扩增接收机是超外差接收机[4]。
反射器的大小,和无线电波的波长的关系。短的波长,反射镜可以更小;长波长,反射会更大。否则,波群效果不好。当然,在相同的波长,反射集聚效应更大,更好的波浪。
半波振子(散热器)和大的反射器在一起,作为一个整体,称为雷达天线。雷达天线这样还专门为抛物面天线。
为10cm微波雷达波长,其长度为5cm半波偶极子,其直径的抛物面反射器,以使无线达到约900万波发出足够的方向。对于波长3毫米波雷达,半波振子是1.5米长。如果数成正比,至少必须有2.7亿直径的锅,可以进行足够的指导,使无线电波发射。这显然是不实用的。因此,VHF雷达,必须找到另一种方式实现无线电发射方向。
半波振子空间中的电子流振荡频率很高,会刺激频率相同的电磁波以光速,它很快地离开了振荡器的苍蝇从四面八方;半波振子是从空间雷达发射的电磁波,它是相当于在水中搅拌一块或一个手电筒灯泡,发挥在水中激起波浪或波效应的空间注入。由于半波偶极子可以向空间发射电磁波,因而有时被称为散热器。
1.4.2
在电子流激振荡的半波振子会遇到阻力,如果不与能源供给它,克服各种阻力,振荡将很快停止。因此,雷达应该有一个机器,它可以驱动振荡的半波振子的电子流,根据我们的需求,大力,这台机器被称为雷达发射机。这是一个半波偶极子的能量,在火炬传递到电池等效。 雷达发射机电源半波振荡器的高频电振荡能量,半波偶极子在空间电磁波。一旦关闭雷达发射机,半波振子站的空间发射电磁波。所以遥控发射器的开关,可以控制空间发射电磁波[3]。
Through Siemens programmable controller to control the servo motor to achieve control radar function.
Key Words:radar;Servo Control System;programmable logic controller
本文通过西门子公司的可编程控制器来控制伺服电机,从而达到控制雷达的功能。
关键字:雷达;伺服控制系统,可编程控制器
Radar antenna direction finding and positioning control system
Abstract
General radar antenna servo control systemsrequires constantdestinationand tracking functions. High precisiondestinationcontrol, fastreplay, constant track for a smooth operation. The actual measuredremovingis amethodof the radartransportationpulse and the echo pulse timeisnot same asthe electromagnetic wavebecause ofthe speed of light, whereby the target can bespreadinto precise distance. Measuring goal orientation is to use a sharp azimuth beam antenna measurements. Measuring elevation by narrow elevation beam measurements.We can calculte the target to know theElevation and distance . Measurement speed is between itself and the target based on radar frequency Doppler effect principle has generated relative motion.The target and the radar transmit frequency of different frequencycanreceiveradar echoes, the Doppler frequency difference between thedoppler.The Doppler is the rate of the change in the distance between the radar and the tagget extracte a important information。When the target and noise to exist in the same spatial resolution of the radar unit, using different radar clutter from the interference between them Doppler frequency target detection and tracking.
1.4.3
一个发射器和一个半波振子,可以发送无线电波到太空。但无线电波发射出去不用于搜索和目标检测。这些波击中目标从四面八方,随着反射回来,那么有没有办法知道哪些目标是在哪个方向。
怎么使雷达只要一个目标放射射无线电波?我们知道,如果全球火炬照明反光碗,赤裸的灯泡发出的光是没有方向性。和反光碗和盖,光是只有一个方向射出,反光碗打了一套光学波函数。 雷达使无线电定向发射,方法是用手电筒聚光灯一样。就是说,不要让半波偶极直接发射无线电波的空间,但让它通过收音机首次推出大象一样大的反射器,从无线电波反射器反射只在一个方向上传输。比如像大反射,称为抛物反射面。
1.2 军事
利用雷达雷达被广泛应用于军事,几乎没有一个武器系统。目前,即使是很小的步枪或壳头也可以安装在小型雷达提高射击精度。
从历史上看,雷达是在第二次世界大战的开始,为防空的需要开发专门开发的。通过不断的测试对无线电通信的基础上,创造了第一个能够检测飞机无线电设备,人们称它为雷达。可见,雷达的诞生与战争的需要,它是随着各种新武器在战争中发展而发展。未来的超音速喷气飞机,导弹,卫星,雷达性能提出了越来越高的要求。由于雷达的雷达型武器的广泛使用,越来越多的。日常军用雷达可分为大地防空雷达,机载雷达,雷达等几类。
5、信号处理:解除不必要的信号和滋扰所发生或由方向回波信号加强,一般在尝试前的决定(MTI,多普勒滤波器组,脉冲压缩)完成。
6、显示器(终端):原始视频,或经过处理的信息。
7、,同步设备(视频合成器):时间和频率标准雷达机(只功率放大(主振荡器放大器)只)
具体的结构框如图1-1雷达的结构组成。
图 1-1 雷达的结构组成
经实践,几十个甚至几百个半波偶极排列按照一定的规则,也可以实现定向传输。和半波偶极子数,更好的方向。
在同一方向的传输条件下,雷达的性能工作波长越短是,雷达天线的尺寸可以做。但不能走向另一个极端,说工作波长雷达是越短越好。如果长波长;太短短的缺陷。无线电波在大气中的传播,当波长太短,会遭受巨大损失。因此,它是不远。于是,雷达的工作既过长,也不过短的波长,它日常工作在超短波或微波波段。
2 雷达天线测向与定位控制系统组成
2.1 雷达专业术语解释
①幕帘夹角幕帘的两道之间的夹角。如图2-1。
图 2-1 幕帘夹角
②窗帘的窗帘打开角度部门双方的角度。如图2-2所示。
图 2-2 幕帘张角
③探测范围
范围是指遥感雷达工作,即雷达可以在这个范围内检测到的所有对象。动从而产生报警状态。
④探测距离
1 雷达的结构组成
1.1 雷达简介
无线电探测与定位”的英文缩写。雷达探测是利益目标的基本任务,确定目标的距离,方问,速度等状态参数。雷达主要由天线,发射机,接收机(包含信号处理器)和显示器等部件的。雷达有两个白天和黑夜检测远程目标的优势,阻塞和不受雾,云,雨,具有全天候的特点,白天和黑夜,并有一定的渗透。于是,它不光一个军事电子设备的基本,并普遍应用于社会和经济的成长,如气象预报,资源勘探,环境监测等)和科学研究(目标,大气物理,电离层的布局等)。机载和星载合成孔径雷达已成为非常重要的,在现代远程传感器。确切的形状对地面雷达的目标检测地面。高达几米到几十米的空间分辨率,是独立的距离。雷达海冰洪水监测,监控,土壤水分,森林资源清查,地质调查等,显示出良好的应用前景。