按最小传动角设计曲柄摇杆机构的图解方法
图解法设计曲柄摇杆机构

. .
/ _ACl = 1 0。 一 / C1 E 8 AE 一 / C1 EA
: 10 一(0 8 。一 9 。一 0)=9 。 0 一0
o o
[ 责任 编辑 : 赵
伟]
/ C,
= / AC, E
( 摩擦因数与相对滑动速度 的关系
2 9
维普资讯
.
.
/C 0 C 所 对 应 的在 圆 1 的 刷 角 为 10 一0 z 上 8。
.
.
AC1 = AE
根据三角形 内角和等于 10 8。
.
故 : 正是 曲柄摇杆 机构在 极位 时所 具 有的尺 寸 此
关系, 此设计 满足全部题设要求 。
[] 1 李学雷主编. 机械设计基础 [ . M] 北京 : 学 出 科 版社 , 0 . 2 4 0 [] 2 孙桓 , 陈作模主编. 机械原理 [ . M] 北京: 高等教 育出版社 , 0 . 2 4 0
.
:8一 。号= 。0 1。9一 9一 0 0 0
又’ . ’在 AA C 中 /CA :0 E l lE
由弹性接 触状 态逐 渐演 变为弹塑 性接触 状态 , 擦因 摩 数 随 比压增 大而缓慢 降低并趋 于稳定 。
图 2 覃 攥 副 在 冷 却 油 中 工 作 时 摩 擦 因 数 与 温厦 的 关 系
22 摩擦副相对滑 动速度 的影 响 . 工程机械制 动时一般 需要 强大 的制动 力矩 , 这意
4 基本 结论
/ 0, 2 : / 0, C1 : C1 C C2 0
.
.
又 ・ C E : / C C : / Cl 2 : . ・/ 1 F _F 2 1 _0, C 0
曲柄摇杆机构设计方法

曲柄摇杆机构设计方法作者姓名:XXXX专业名称:机械工XXXX及自动化指导教师:XXXX讲师摘要曲柄摇杆机构中构件的运动样式多样,可以实现给定运动规律或运动轨迹且承载能力高、耐磨顺,制造简单,已于获得较高的制造精度,因此曲柄摇杆机构在各种机械仪器中获得广泛的应用。
本文针对曲柄摇杆机构的行XXXX速度变化速度系数和给定点的轨迹设计曲柄摇杆机构,通过深入分析机构的行XXXX数度比k、摇杆摆动角'-:、最小传动角,极为夹角和摇杆摆动角等运动性能参数与结构尺寸间的关系。
通过引入曲柄固定铰链点的位置角建立了曲柄摇杆和机架长度关于二和「的显示函数关系,通过解析法、几何作图法、和实验法设计曲柄摇杆机构。
在此基础上研究机构设计的可能附加要求极其相应的设计方法为曲柄摇杆设计提供各种可能选项并对曲柄摇杆的急回特性和死点情况进行说明。
关键词:曲柄摇杆机构行XXXX速度系数摇杆摆动设计方法AbstractThe diversity of movement component in the crank rocker mechanism can achieve given amotion or motion trajectory and have the high bearing capacity, wear-resisting, simple manufacture,and higher manufacturing accuracy. therefore ,the crank rocker mechanism is widely used in various mecha ni cal in strume nt.In view of the crank rocker mecha nism of velocity fluctuati on velocity coefficient and the design of crank rocker mechanism by track point, Analysis the mechanism of the stroke number ratio K , the rocker swing an gle mi nimum tran smissi on an gle, extremely an gle and rocker swi ng an gle moti on parameter and t he relati on ship betwee n structure size deeply. Introduced the crank fixed hinge point position angle of crank rocker and the frame len gth on and display fun cti on is built, by the an alytic method, the geometric drawing method, the design of crank rocker mechanism and experimental method. On the basis of the research on the design method of mecha nism desig n may have additi onal requireme nts and other extremely corresp onding , various possible opti ons and the crank rocker quick retur n characteristics and the dead are described for crank and rocker desig n.Key words cran k,rocker,travel speed,desig n目录摘要 (I)Abstract ............................................................................................. L L 目录.. (IIIII)1绪论...................................................... 1.. 2平面四杆机构概述 (3)2.1平面四杆机构的基本型式 (3)2.2平面四杆机构的基本特性 (4)2.2.1急回特性 (5)2.2.2死点位置 (6)2.2.3传动角和压力角 .................................. 7. 3曲柄摇杆机构的设计 (9)3.1解析法设计曲柄摇杆机构 (9)3.1.1附加要求及其机构设计方法 (11)3.2几何作图法 (13)3.2.1按照给定的行XXXX数度变化系数设计曲柄摇杆 (13)3.2.2按给定连杆位置设计四杆机构 (14)3.3按照给定点的运动轨迹设计曲柄摇杆机构 (14)3.4曲柄摇杆机构设计方法的比较......................... 1 44 曲柄摇杆机构的特性运用 (16)4.1曲柄摇杆机构死点特性分析极其运用 (16)4.1.1摇杆主动时机构的死点情况 (16)4.1.2曲柄主动时机构有死点位置的条件 (16)4.1.3满足有死点条件的曲柄摇杆机构的死点个数及位置情况分析 ......................................... 1.74.1.4曲柄摇杆机构有死点条件的应用 (20)4.2曲柄摇杆机构急回特性应用........................... 2 1 5曲柄摇杆机构的优化设计 (22)5.1按照最小传动角和行XXXX速度比系数最大综合优化 (22)5.1.1最小传动角的确定 (22)5.1.2优化设计 (24)5.1.3最小传动角min最大的目标函数的建立 (25)5.1.4总目标函数的建立 (26)5.2 算例(1) (27)5.2.1曲柄摇杆机构设计 (27)5.3基于图谱对曲柄摇杆的优化........................... 2 95.3.1最小传动角位置分析 (29)5.3.2极为夹角分析 (30)5.3.3摇杆摆角分析 (31)5.4曲柄摇杆优化 (31)5.4.1增大最小传动角 (31)5.5 算例(2) (32)总结....................................................... .3.3致谢....................................................... .3.4参考文献 (35)1绪论18世纪下半叶的第一次工业革命促进机械工XXXX的迅速发展,机构学在原来机械力学的基础上发展成为一门独立的科学•早在19世纪连杆机构就已经广泛的运用最简单的就是四杆机构,也是出现最早的一种连杆机构。
《机械设计基础》判断题

《机械设计基础》判断、选择题2 零件是机械的最小?单元。
(√)4 机械是机器和机构的总称。
(√)7 Q235、35、45均为优质碳素钢。
(×)12 机械设计的强度准则就是,。
(√)14 淬火是为了改善切削性能,消除内应力,使材料的晶粒细化。
(×)15 淬火可提高材料的硬度和强度,并消除内应力。
(×)17 机器与机构它们都是人为的产物,有确定的运动,并有能量的转化。
(×)20 牌号为QT500-7表示球墨铸铁,,伸长率为7%。
(√)21 构件系统的自由度为F(>0),若给定的原动件数目等于F ,该传动系统能成为机构。
(√)22 一切自由度不为1的机构,其各构件之间都不可能具有确定的相对运动。
(×)23 机构主要是由主动件、从动件和机架组成。
(×)24 两构件通过点或线接触组成的运动副是高副。
(√)26 两构件通过面接触组成的运动副是低副。
(√)27 平面低副引入的约束数为1。
(×)28 每个运动副都是一个构件。
(×)29 凡是有滚子的地方都存在局部自由度。
(×)30 机构的自由度就是构件的自由度。
(×)31 复合铰链与转动副和移动副都有关。
(×)32 转动副和移动副都是平面低副。
(√)33 平面机构和自由度为2,说明需要2 个原动件才能有确定运动。
(√)34 机构中每个主动件相对机架可以有几个独立运动。
(×)35 在绘制机构运动简图时,不仅要考虑构件的数目,而且要考虑构件的构造。
(×)36 在平面机构中,自由度的减少数就等于约束数。
(√)37 机构可能会有自由度F 0的情况。
(×)38 当m个构件用复合铰链相联接时,组成的转动副数目也应为m个。
(×)39 局部自由度与机构的运动是有关的。
(×)40 在机构运动简图中运动副和构件都应用规定的符号和线条表示。
机械设计基础—曲柄摇杆

C
2-6. 设计一曲柄摇杆机构,已知摇杆长度l =100mm,摆角ψ=30°, 摇杆行程速度变化系数K=1.2。
(1)用图解法求出其余三杆的尺寸;
(2)确定机构的最小转角γmin (若γmin <35°则应重新选定铰链A的位置)。
解:
(1)由题知,摇杆行程速度变化系数K=1.2, 得极位夹角:
θ=180°K-1K+1 = 16.4° 90°-θ=72.6°则如图解析:
①任选固定铰链中心D的位置,由摇杆长度l 3和摆角ψ,做出摇杆两极限位置C 1D 和C ?D。
②连接C 1和C ?,并过C 1点做C 1C ?垂线。
③做∠C 2=90°-θ,与垂线相较于点P,有几何关系可知∠C 1PC ?=θ。
④做△C 1PC ?的外接圆,在此圆周上任意选取一点A作为曲柄的固定铰链中心;连接AC 1和AC ?,由几何关系得:∠C 1PC ?=∠C 1AC ?=θ。
⑤因极限位置处于曲柄与连杆共线,
故A C 1=l 2-l 1 AC 2=l 2+l 1,则l 1=(AC 2-AC 1)/2 =23.5mm l 2=(AC 2+AC 1)/2 =73.5mm l 3= 100mm l 4 = 96mm 则如图,ABCD即为所求机构一般位置简图。
cos∠BCD=(l ?2+l 32-l 12-l 42+2l 1l 4cos φ)/2l ?l 3 =0.649则由(2-6)′cos∠BCD < 90°γ=49.5°>35°
故最小传动角满足要求。
机械原理课后答案第8章
第8章作业8-l 铰链四杆机构中,转动副成为周转副的条件是什么?在下图所示四杆机构ABCD 中哪些运动副为周转副?当其杆AB 与AD 重合时,该机构在运动上有何特点?并用作图法求出杆3上E 点的连杆曲线。
答:转动副成为周转副的条件是:(1)最短杆与最长杆的长度之和小于或等于其他两杆长度之和;(2)机构中最短杆上的两个转动副均为周转副。
图示ABCD 四杆机构中C 、D 为周转副。
当其杆AB 与AD 重合时,杆BE 与CD 也重合因此机构处于死点位置。
8-2曲柄摇杆机构中,当以曲柄为原动件时,机构是否一定存在急回运动,且一定无死点?为什么?答:机构不一定存在急回运动,但一定无死点,因为:(1)当极位夹角等于零时,就不存在急回运动如图所示,(2)原动件能做连续回转运动,所以一定无死点。
8-3 四杆机构中的极位和死点有何异同?8-4图a 为偏心轮式容积泵;图b 为由四个四杆机构组成的转动翼板式容积泵。
试绘出两种泵的机构运动简图,并说明它们为何种四杆机构,为什么?解 机构运动简图如右图所示,ABCD 是双曲柄机构。
因为主动圆盘AB 绕固定轴A 作整周转动,而各翼板CD 绕固定轴D 转动,所以A 、D 为周转副,杆AB 、CD 都是曲柄。
8-5试画出图示两种机构的机构运动简图,并说明它们各为何种机构。
图a 曲柄摇杆机构图b 为导杆机构。
8-6如图所示,设己知四杆机构各构件的长度为240a mm =,600b =mm ,400,500c mm d mm ==。
试问:1)当取杆4为机架时,是否有曲柄存在?2)若各杆长度不变,能否以选不同杆为机架的办法获得双曲柄机构和双摇杆机构?如何获得?3)若a 、b ﹑c 三杆的长度不变,取杆4为机架,要获得曲柄摇杆机构,d 的取值范围为何值? : 解 (1)因a+b=240+600=840≤900=400+500=c+d 且最短杆 1为连架轩.故当取杆4为机架时,有曲柄存在。
按最佳传动角设计偏置曲柄滑块机构
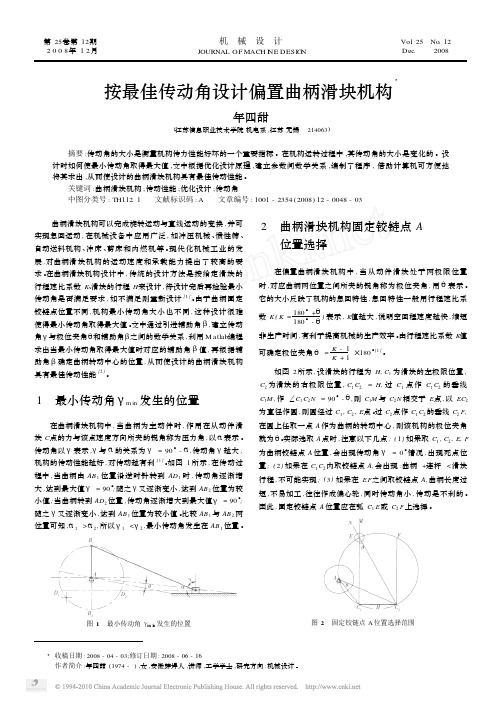
。 由于曲柄固定
铰链点位置不同 , 机构最小传动角大小也不同 , 这种设计很难 使得最小传动角取得最大值 。 文中通过引进辅助角 β , 建立传动 角γ 与极位夹角θ 和辅助角β 之间的数学关系 , 利用 M atlab编程 求出当最小传动角取得最大值时对应的辅助角 β值 , 再根据辅 助角 β确定曲柄转动中心的位置 , 从而使设计的曲柄滑块机构 具有最佳传动性能 [ 2 ] 。
基于竹子微观结构的柱状结构仿生设计
马建峰 ,陈五一 ,赵岭 ,赵大海
1 1 1 2
3
( 1. 北京航空航天大学 机械工程及自动化学院 ,北京 100083; 2. 沈阳飞机设计研究所 ,辽宁 沈阳 110035)
49
3 最小传动角 γ m in 与极位夹角 θ
之间的数学关系
K
3 β ( ) / °
如图 3所示 , 在圆的左边弧 C1 E取 A 点 , 设该机构曲柄的长 度为 a, 连杆的长度为 b, 偏心距为 e。 AC1 是曲柄和连杆处于重 叠共线时的位置 , 所以 AC1 = b - a; AC2 是曲柄和连杆处于拉直 共线时的位置 , 所以 AC2 = a + b。 C1 C2 是导路的方向线 , AD 就 是偏心距 e。 设 ∠AC2 C1 =β(由β 可确定 A点的位置 ) , 由曲柄滑 块机构固定铰链点 A 位置选择在弧 C1 E或 C2 F上可知 ,β > 0 ° , θ +β < 90 ° , 辅助角 β 的取值范围为 0 °< β < 90 °- θ 。
46. 27 45. 44. 43. 42. 42. 41. 40. 39. 39. 36 48 63 81 00 22 46 73 00
13. 24 13. 13. 13. 13. 13. 13. 13. 13. 13. 35 41 46 52 57 58 64 64 64
机械原理课程设计图解法设计平面连杆机构
工程技术学院课程设计题目:图解法设计平面连杆机构摘要设计内容:设计曲柄摇杆机构。
已知摇杆长度l,摆角ψ,摇杆3的行程速比系数K,要求摇杆CD靠近曲柄回转中心A一侧的极限位置与机架间的夹角为∠CDA,试用图解法设计其余三杆的长度,并计算机构的最小传动角γ。
设计方法:在设计时首先需计算极位夹角θ,再绘制机架位置线及摇杆的两个极限位置,然后确定曲柄回转中心和各杆长度最后验算最小传动角 。
最后根据已知数据和所计算的数据进行图解,画出平面四杆机构图。
平面连杆机构是由若干构件用平面低副(转动副和移动副)联接而成的平面机构,用以实现运动的传递、变换和传送动力。
平面连杆机构的使用很广泛,它被广泛地使用在各种机器、仪表及操纵装置中。
例如内燃机、牛头刨、钢窗启闭机构、碎石机等等,这些机构都有一个共同的特点:其机构都是通过低副连接而成,故此这些机构又称低副机构低副机构低副机构低副机构。
关键词:机械设计基础机械设计基础课程设计平面四杆机构图解法极位夹角云南农业大学工程技术学院目录1题目 (3)1.1原始数据及要求 (3)1.2 工作量 (3)1.3 制图说明 (3)1.4 设计计算说明书包括的内容 (3)2 设计方案的讨论 (4)3 设计过程 (5)3.1 各杆长度的确定 (5)3.2 盐酸最小传动角 (6)4 小结 (7)5 参考文献 (8)1、题目1.1原始数据及要求:设计曲柄摇杆机构。
已知摇杆长度l,摆角ψ,3摇杆的行程速比系数K,要求摇杆CD靠近曲柄回转中心A一侧的极限位置与机架间的夹角为∠CDA,试用图解法设计其余三杆的长度,并计算机构的最小传动角γ。
1.2工作量:1.平面连杆机构图解法设计图纸一张。
2.计算说明书一份。
1.3制图说明:1.用3号图纸作图。
2.标注尺寸。
3.辅助线用细实线。
4.杆的一个极限位置用粗实线,另一个极限位置用虚线。
1.4设计计算说明书包括的内容:1.设计任务书2.目录3.设计过程3.1.计算极位夹角θ3.2.绘制机架位置线及摇杆的两个极限位置3.3.确定曲柄回转中心3.4.确定各杆长度3.5.验算最小传动角γ参考文献2、设计方案的讨论平面连杆机构是将各构件用转动副或移动副联接而成的平面机构。
《机械设计基础习题解》

1.1 如图1.1-1所示为一简易冲床设计方案,试绘制其运动简图,分析其是否具有确定的运动。
如不具有确定的运动,请给出使其有确定相对运动的改进方案。
解:该设计方案的机构运动简图如图 1.1-2所示。
由于其自由度32332410L H F n P P =--=⨯-⨯-=,该设计方案不具有确定的运动。
为使机构的自由度增加,可改一个低副为高副,也可引入一个构件和一个低副。
图1.1-3~5为几种改进方案(修改之处可移至他处出现,从而获得新的改进方案)。
图1.1-1 图1.1-2 图1.1-3图1.1-4 图1.1-5友情提示:折线表示的弹簧起到保证构件3与凸轮接触的作用,不涉及运动副。
1.2 请绘制图示平面机构的运动简图,并计算自由度,确定主动件。
图1.2-(a) 图1.2-(b)(a )3233241L H F n P P =--=⨯-⨯=,主动件为1 (b )3235271L H F n P P =--=⨯-⨯=,主动件为1 (c )3233241L H F n P P =--=⨯-⨯=,主动件为1 (d )3233241L H F n P P =--=⨯-⨯=,主动件为2图1.2-(c) 图1.2-(d)1.3 请计算图示各机构的自由度。
友情提示:(a)存在局部自由度;(b)存在一高副、中间杆非虚约束;(c)注意焊接符号;(d)存在齿轮高副。
1.4 请计算图示各机构的自由度。
友情提示:(a)存在局部自由度和两个高副;(b)注意焊接符号和复合铰链;(c)曲柄滑块机构+杆组、虚约束较多;(d)(e)(f)存在复合铰链。
1.5 请计算图示各机构的自由度。
友情提示:(a)A处存在复合铰链;(b)B、C、D处存在复合铰链。
3.1 根据杆长条件和机架判断铰链四杆机构的类型,分别为双曲柄、双摇杆、双摇杆、不符合机架条件的双摇杆机构。
3.2 液压泵机构。
左为曲柄摇块机构,右为曲柄滑块机构。
图3.23.3 压力机的机构属于曲柄滑块机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
按最小传动角设计曲柄摇杆机构的图解方法*刘争利(南京电子技术研究所,江苏南京 210039)摘 要:根据曲柄摇杆机构设计的图解方法和最小传动角的要求,借助Solidworks中的约束功能使绘制出的机构草图处于完全定义状态,快速定位出曲柄转动中心的位置,从而求出其余杆件的长度㊂该方法操作简单并且设计精度高,在机械设计方面有较好的应用价值㊂关键词:曲柄摇杆机构;最小传动角;约束;图解法;Solidworks中图分类号:TH123 文献标志码:A 文章编号:1007-4414(2015)03-0157-003 Graphic Method for Designing Crank-Rocker Mechanism According to Minimum Transmission AngleLIU Zheng-li(Nanjing Research Institute of Electronics Technology,Nanjing Jiangsu 210039,China)Abstract:According to the graphic method of crank-rocker mechanism design and the requires of minimum transmission an⁃gle,the sketch is drawed out in fully defined situation by using the constraint functions of Solidworks,thus the position of rota⁃tion center of the crank could be quickly located so as to obtain the length of the rest rods.This method is simple and has high design accuracy,and could possesse a good application value in mechanism design.Key words:crank-rocker mechanism;minimum transmission angle;constraints;graphic method;Solidworks0 引 言曲柄摇杆机构具有结构简单㊁制造容易㊁工作可靠的特点,在众多机械中得到了广泛的应用㊂在目前的设计方法中,传统的图解法简单易行,尤其在阐述原理和构型分析等方面发挥出无可替代的作用,但该方法最大的缺点在于必须用反复试凑的手段来寻求符合传动角要求的机构尺寸,因此设计精度低;解析法借助计算机以及数值计算等方法,设计精度高,能满足工程实际需要,但计算公式多,过程复杂,需编制程序求解非线性方程组,从而影响了设计效率[1-3]㊂因此,若能发挥图解法和解析法各自的优势,方便快捷地得到精确的机构设计结果是工程人员所期望的最终目标㊂笔者将介绍借助Solidworks的约束功能去完成以最小传动角设计曲柄摇杆机构的图解方法,从而实现机构图解法的精确设计㊂1 传动角对机构的影响和其最小值的确定考虑到度量方便,通常用压力角α的余角γ(即曲柄AB通过连杆BC作用在摇杆CD上的力F与F 沿摇杆方向的分力F n所夹的锐角)来判断机构传力的性能,γ称为传动角,由图1可知,γ越大,则机构的传动性能就越强㊂在机构运动过程中,传动角的大小是变化的,为了保证机构具有良好的传动性能,必须对最小传动角γmin提出要求:对于一般的机构通常取γmin≥40°,而对于高速和大功率的传动机械,应使γmin≥50°㊂如果用δ表示连杆BC与摇杆CD的夹角,当δ为锐角时,则γ=δ;当δ为钝角时,则γ=180°-δ㊂δ随曲柄AB与机架AD之间的转角ϕ的变化而变化㊂由图1可推出:δ=arccos[(l22+l23-l21-l24+2l1l4cosϕ)/2l2l3](1)由公式(1)可知,在δ=δmin或δ=δmax时,该机构出现最小传动角γmin,即:δmin=arccos[(l22+l23-l21-l24+2l1l4)/2l2l3](当ϕ= 0°时)(2)δmax=arccos[(l22+l23-l21-l24-2l1l4)/2l2l3](当ϕ= 180°时)(3)故可得:γmin={δmin(锐角),δmax(锐角),[180°-δmin(钝角)],[180°-δmax(钝角)]}(4)图1 曲柄摇杆机构的传动角㊃751㊃㊃机械研究与应用㊃2015年第3期(第28卷,总第137期) 经验交流*收稿日期:2015-05-27基金资助:国家自然科学基金重大项目(编号:51490664)作者简介:刘争利(1975-),男,陕西西安人,工程师,硕士,研究方向:天线结构设计㊂ 由文献[4]可知,对于图1所示的所有曲柄摇杆机构(曲柄转动中心A 和摇杆摆动中心D 位于C′C″连线同侧),其最小传动角γmin 在ϕ=0°的位置上出现,即γmin =δmin ;对于曲柄转动中心A 和摇杆摆动中心D 位于C′C ″连线异侧的所有曲柄摇杆机构,其最小传动角γmin 在ϕ=180°的位置上出现,即γmin =δmax ㊂2 曲柄摇杆机构的图解设计具有急回特性的曲柄摇杆机构,其设计的已知条件为:摇杆长度CD 和其摆角ψ以及行程速比系数K ㊂多数参考资料的图解设计过程如下㊂首先,计算出极位夹角θ,即:θ=180×K -1K +1(5)其次,任选一点D 作为固定铰链,如图2所示,并以此点为顶点作等腰三角形DC 2C 1㊂使两腰之长等于摇杆长度CD ,∠C 1DC 2=ψ㊂然后过C 1点作C 1M ⊥C 1C 2,再过C 2点作∠C 1C 2N =90°-θ,线段C 1M 和C 2N 的交点为P㊂图2 图解法设计曲柄摇杆机构 最后,以线段C 2P 为直径作圆,则此圆周上任一点与C 1,C 2连线所夹之角度均为θ㊂曲柄转动中心A 应在圆弧C 1PF 或C 2G 上任取,不能在FG 劣弧上取,否则机构将不能满足运动的连续性[5]㊂由图2可知,曲柄AB 与连杆BC 重叠共线和拉直共线的两个位置为AC 1和AC 2,则:AC 1=B 1C 1-AB 1(6)AC 2=B 2C 2+AB 2(7)由式(6)和式(7)两式可解得曲柄AB 长度和连杆BC 长度AB =(AC 2-AC 1)/2=EC 2/2BC =AC 2-AB 2线段EC 2可由以A 为圆心㊁AC 1为半径作圆弧与AC 2的交点E 来求得,也可以认为线段EC 2的长度就是曲柄AB 长度的两倍,即:EC 2=2×AB(8)由图2可知,当曲柄转动中心A 点取在不同的位置时,满足上述设计条件的曲柄摇杆机构会有无穷多个,同时所对应的最小传动角也不相同㊂因此,设计时若能给出其他附加条件(如最小传动角的要求),则能确定出曲柄转动中心A 的位置㊂3 约束对草图自由度的限制在Solidworks 软件中,草图一般是指在面上的二维几何图形,是特征造型的基础;约束是对草图中的图元形状㊁大小和位置所施加的各种控制条件,这些控制条件可以在草图绘制过程中由系统自动添加或由设计者自行添加㊂约束可分为几何约束和尺寸约束两大类[6],例如,通过几何约束可定义草图中某一图元的方向(如固定㊁水平㊁竖直)或某两个图元间的关系(如共线㊁垂直㊁平行㊁相等㊁同心㊁重合㊁相切等);通过尺寸约束(包括线性尺寸㊁角度尺寸和圆弧尺寸等)可确定草图中图元的大小和位置㊂定义1草图自由度是指构成草图中的各个基本图元自由程度的总和㊂用S f 代表草图自由度,则:S f =∑ni =1N i ×M i(9)式中:N i 是第i 种基本图元的数量;M i 是第i 种基本图元的自由程度;n 为基本图元的种类㊂定义2约束度是指添加约束后,对草图自由度的限制㊂用C f 表示约束度,则:C f =∑mj =1A j ×B j(10)式中:A j 是第j 种约束的数量;B j 是第j 种约束所限制自由的程度;m 为约束的种类㊂在上述定义中,关于基本图元的种类与自由程度㊁不同约束所限制自由的程度这两方面的说明,可以参考文献[7],本文不再详述㊂当S f <C f 时,代表草图过定义,草图与约束之间有干涉现象,过定义的草图实体颜色系统显示为红色;当S f >C f 时,表示草图欠定义,其实体可能在某个方向进行移动或转动,欠定义的草图实体颜色系统显示为蓝色,如图2所示的线段AD ㊁AC 2和B 1C 1等;当S f =C f 时,代表草图完全定义,其实体的位置㊁形状和大小是唯一的,完全定义的草图实体颜色系统显示为黑色,如图2所示的线段C 1D 和C 2D 等㊂4 按最小传动角图解设计的步骤由以上分析可知,在Solidworks 环境下若能够使绘制出的曲柄摇杆机构草图处于完全定义状态,那么按最小传动角的要求就能确定出曲柄转动中心的具体位置[8]㊂㊃851㊃经验交流 2015年第3期(第28卷,总第137期)㊃机械研究与应用㊃图解设计的过程如图3所示,首先,根据工程实际设置尺寸的精度;再依据已知条件(摇杆长度和其摆角ψ以及行程速比系数K ),绘制出一个大致的机构草图,其中图元间的几何约束是系统根据图元间的位置自动判断并添加的,以绿色图标标识,如图2所示;然后添加必要的几何约束(如连杆在不同位置时的杆长关系,图2中的线段EC 2与曲柄AB 的长度关系)和尺寸约束(按最小传动角的附加条件设置连杆和摇杆之间的角度)使草图成为完全定义状态;最后,根据确定出的曲柄转动中心位置,测量出其余的杆件长度㊂图3 图解设计流程5 应用实例设计一曲柄摇杆机构,已知摇杆的长度L CD =100mm,摇杆摆角ψ=32°,行程速比系数K =1.25,最小传动角γmin =40°,试确定出曲柄L AB ㊁连杆L BC 和机架L AD 的尺寸㊂(1)设置尺寸精度由于已知条件中没有明确的精度要求,考虑到有不可避免的制造误差,所以在SolidWorks 中将尺寸精度设置为小数点后3位,这对于尺寸单位为毫米来讲,设计出的结果完全满足于工程实际要求㊂若有明确的精度要求,则按需要设置即可,精度最高可设置为小数点后8位㊂(2)绘制草图通过公式(5)计算出极位夹角θ=20°,首先按图解法步骤大致绘出如图2所示的曲柄摇杆机构草图,在圆弧C 1PF 上任取一点为A 点,连接AD ;然后以图4所示的A 点为圆心,以适当半径为大小做圆①交AD 连线于B 点,连接C 1A 并延长交圆①于B 1点,连接C 2A 交圆①于B 2点;接着自B 点作连线BC 交C 1C 2劣弧于C 点(此劣弧是以D 为圆心,以摇杆的长度L CD 为半径所得的圆弧),连接CD ;最后再以A 点为圆心,以AC 1为半径画弧交AC 2于E 点,以C 2E 为直径作圆②㊂(3)添加约束在上述草图绘制过程中,所有草图实体的几何关系是系统自动添加的,我们无需再进行设置㊂现在需要为连杆在两个不同位置处的长度设置 相等”的几何约束,即线段BC 和线段B 1C 1;根据式(8)所描述的含义,为图4中的圆①和圆②添加 相等”的几何约束㊂根据最小传动角的要求,为线段BC 和线段CD 添加 角度”约束关系,即通过 标注尺寸”命令来实现,使∠BCD =40°,此时图中的所有线条颜色全部成为黑色,表明草图处于完全定义状态,即A 点的位置唯一确定㊂(4)测量尺寸执行 标注尺寸”的命令,选择线段B 1C 1,此时系统会提示 增加这个尺寸将导致草图过定义”的提示,这表明尺寸已定义,可将尺寸设为从动,标出的尺寸会以灰度状态显示出来,如图4所示㊂这时标注尺寸的意义只相当于测量出设计结果的功能,以同样的方式,将线段AD 和AB 1的长度测量出来㊂设计结果为:曲柄长度L AB =22.651mm,连杆长度L BC =94.243mm,机架长度L AD =89.048mm㊂图4曲柄摇杆机构的设计结果5 结 论由于该方法不涉及机构设计的数学建模和计算编程,所以易被普通机械设计者所接受,另外也可作为专业设计研究人员用于与解析法相互验证的一种相辅相成的有效手段[9]㊂总而言之,使用SolidWorks进行曲柄摇杆机构的图解法设计,既有传统图解法简便直观的特点,又有解析法精确程度高的优点,这不仅在设计效率方面有了很大的提高,同时在设计思想和方法上有了新的飞跃,值得大力推广和应用㊂(下转第161页)㊃951㊃转子振动的较为平稳㊂轴承箱水平和垂直方向振动分别为3.2mm /s 和2.0mm /s,但机壳的振动情况没有改善㊂通过振动分析可知,更换转子后整个轴系的平衡发生了变化,由于现场平衡难处理,机组不是简单的平衡问题㊂风机延长轴本身存在安装缺陷㊂从工程学角度看,延长轴与发电机轴为刚性连接且较短㊁质轻,可视为一个轴,而采用了不常见的三支撑结构㊂存在明显的过定位现象,设计不合理㊂2.2 振动特性分析风机辅助轴承与轴承箱的振动幅值差距较大,在线监测轴承箱的振动在3.2mm /s 时,壳体中分面水平方向的振动达16.2mm /s,且轴向振动更大㊂两个振动值说明风机的壳体和轴承座间可能存在松动㊂3 解决措施利用停机检修机会,进行了一系列的启㊁停机实验,验证机组的运行特征㊂首先对延长轴进行检查,经检查该延长轴的轴径椭圆,且端面与中心线不垂直㊂厂家采用端面加垫子来调整轴颈的跳动值,实测跳动0.16mm㊂解体发现端面凸台不能可靠定位,由6个螺栓直接紧固,三个不均匀分布的径向骑缝销定位㊂发电机厂家为减小轴颈的跳动值而加的偏垫子达到0.4mm 之后㊂从连接形式看不是原设计就有的,是由于某种原因过后加装的,定位精度根本无法保证㊂为验证机组转子特性,去掉接长短轴后开机试验,机组跳车值设为200mm,机组跳车时2606r /min㊂按照说明书,机组一阶临界在1200~1600r /min 之间,二阶应在4000r /min 以上,但现在去除连接长轴后试机情况看,值特图中过临界时,机组各方向的振动相位趋于相同,有明显的共振现象,这也是机组临界点的明显特征㊂在2600r /min 时,后轴承的水平㊁垂直振动相位也趋于同相,明显具有临界的特征㊂通过基础加固㊁现场动平衡均不能有效地改变这一特征㊂最后只能回复延长轴,对延长轴加工精度校验合格后,进行了精心的对中,对中精度达到了0.04mm 以内(厂家标准0.08mm),并进行了可靠的防松处理㊂起机实验发现,2600r /min 可以通过,然后,对机组进行现场动平衡,机组振动得到了可靠控制㊂运行一段时间后,机组运行趋于平稳㊂一阶临界已显得不太明显㊂工作转速时可以稳定运行㊂励磁机辅助支撑水平㊁轴向振动6mm /s 以下,振动位移50μm 左右㊂机组其它轴承振动正常㊂4 结 论(1)该机组存在严重的设计缺陷,转子特性不能满足技术要求㊂转子存在第二临界过低的现象,在2600r /min 左右,接近转子工作转速㊂为了避开工作转速,厂家加装了接长轴,从而使机组能够在3000r /min 运行㊂(2)通过一系列实验,了解了机组的工作特性㊂擦去了延长轴对中㊁可靠地防松㊁基础的加固措施,明显提高机组运行稳定型㊂参考文献:[1] 陈敏生.动静结合可调轴流风机高倍频振动特性分析[J].中国电力,2013(11):36-39.[2] 王 正.导流罩对冰箱冷凝风机噪声的影响[J].机械工程学报,2013(11):36-39.[3] 田文龙.一种新型垂直轴式风机叶轮的数值仿真[J].机械工程学报,2013(18):52-55.[4] 万剑峰.风机叶片表面分离涡与宽频噪声辐射特性的分析[J].动力工程学报,2013(18):14-17.[5] 廖高华.风机叶片旋转疲劳加载系统研究[J].机械设计与制造,2013(18):62-65.(上接第159页)参考文献:[1] 张静,王占英,刘春东,等.按最小传动角设计曲柄摇杆机构的解析方法[J].机械设计,2008(10):64.[2] 孟维云.鹿晓阳.曲柄摇杆机构的综合优化设计[J].机械研究与应用,2008(6):87-89.[3] 王 勇.宋德朝.基于MATLAB /Simulink 的四杆机构连杆点轨迹仿真,机械研究与应用,2007(3):98-100.[4] 李均益.也谈判定曲柄摇杆机构γmin 三命题的证明[J].机械设计,1996(6):37-38.[5] 申永胜.机械原理教程[M ].北京:清华大学出版社,2005.[6] 湛迪强.Solidworks2008宝典[M].北京:电子工业出版社,2008.[7] 饶 刚.Solidworks 约束与草图自由度的关系[J].湖北工业大学学报,2005(6):40.[8] 杨晓龙,史丽晨.曲柄摇杆机构图解法的参数化设计[J].煤矿机械,2015(2):55-57.[9] 陈辽军,郑晓虎,张 强.利用SolidWorks 约束功能实现机构图解法的参数化设计[J].轻工机械,2004(3):59.㊃161㊃。