!控制系统计算机辅助设计课后题部分答案
(完整版)计算机控制系统课后习题答案
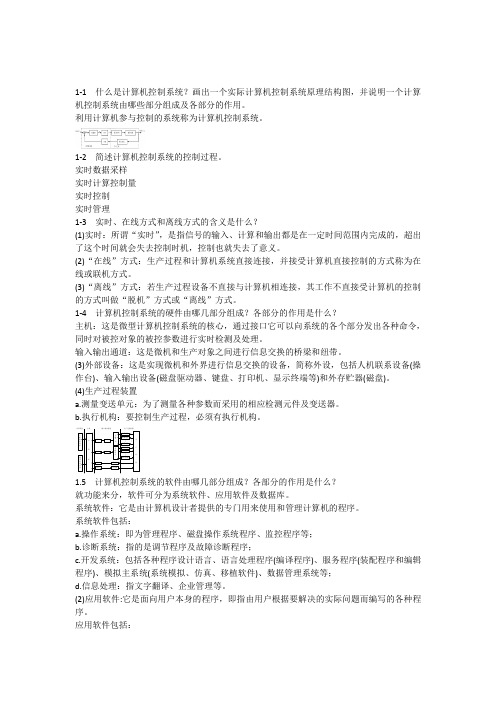
1-1 什么是计算机控制系统?画出一个实际计算机控制系统原理结构图,并说明一个计算机控制系统由哪些部分组成及各部分的作用。
利用计算机参与控制的系统称为计算机控制系统。
1-2 简述计算机控制系统的控制过程。
实时数据采样实时计算控制量实时控制实时管理1-3 实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:生产过程和计算机系统直接连接,并接受计算机直接控制的方式称为在线或联机方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制的方式叫做“脱机”方式或“离线”方式。
1-4 计算机控制系统的硬件由哪几部分组成?各部分的作用是什么?主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
(3)外部设备:这是实现微机和外界进行信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。
(4)生产过程装置a.测量变送单元:为了测量各种参数而采用的相应检测元件及变送器。
b.执行机构:要控制生产过程,必须有执行机构。
1.5 计算机控制系统的软件由哪几部分组成?各部分的作用是什么?就功能来分,软件可分为系统软件、应用软件及数据库。
系统软件:它是由计算机设计者提供的专门用来使用和管理计算机的程序。
系统软件包括:a.操作系统:即为管理程序、磁盘操作系统程序、监控程序等;b.诊断系统:指的是调节程序及故障诊断程序;c.开发系统:包括各种程序设计语言、语言处理程序(编译程序)、服务程序(装配程序和编辑程序)、模拟主系统(系统模拟、仿真、移植软件)、数据管理系统等;d.信息处理:指文字翻译、企业管理等。
计算机辅助设计_习题集(含答案)
《计算机辅助设计》课程习题集一、单选题1.在AutoCAD中,将整个视图在视区内最大限度地加以显示,应该使用的命令是()。
A.Zoom All B.Zoom Extents C.Zoom Window D.Zoom Center2.在AutoCAD中,打开正交模式(ORTHO)后用鼠标()。
A.可以画任意方向的直线B.只能画水平线C.只能画垂直线D.只能画水平线和垂直线3.在AutoCAD中,下列设备中不属于输出设备的是()。
A.显示器B.打印机C.绘图仪D.数字化仪4.在AutoCAD的Trim命令执行过程中,欲恢复刚刚误操作剪切的边,正确的操作是()。
A.键入字符"U" B.直接回车C.键入字符"R" D.键入字符"P"5.在AutoCAD中,标注某一尺寸后,尺寸线、尺寸文本和延伸线()。
A.都不能改变 B.都可以改变C.只有尺寸文本和尺寸线可以改变D.只有延伸线和尺寸文本可以改变6.在AutoCAD中,角度型尺寸(dimangular)标注命令进行尺寸标注时,()。
A.只能标注圆弧角度和两直线角度B.只能标注两直线角度和整圆的部分角度C.只能在整圆上标出部分角度和圆弧角度D.既能在整圆上标出部分角度,也可以标注圆弧和两直线角度7.在AutoCAD中,如何根据坐标系图标来判断用户当前所处的坐标系()。
A.UCS能随图形旋转,而WCS则不能B.UCS图标有U,WCS图标有WC.只有WCS图标有W D.WCS能随图形旋转,而UCS则不能8.在AutoCAD中使用rotate命令对图形进行旋转操作时,旋转基点()。
A.只能是(0,0)B.要进行旋转操作的图形上的一个端点、中点或交点C.只能是某个圆的圆心点D.可以是任意的一个点9.在用鼠标点击图形构建AutoCAD图形选择集时,下列说法正确的是()。
A.一次选中一个图形实体B.在交点处点击可选中多个实体C.无法选中实体D.选出最后画的实体10.在AutoCAD中,以下哪种方式不能打开正交方式()。
!控制系统计算机辅助设计课后题部分答案

第三章1.1>>s=tf('s');G=(s^2+5*s+6)/(((s+1)^2+1)*(s+2)*(s+4))或者G=(s^2+5*s+6)/((s+1)^2+1)/(s+2)/(s+4)1.2 >> z=tf('z',0.1);H=5*(z-0.2)^2/(z*(z-0.4)*(z-1)*(z-0.9)+0.6)2.>> den=[1 10 32 32];num=[6 4 2 2];G=tf(num,den)>> zpk(G)3.A=[-1,1,0; 0,-1,-3; -1,-5,-3];B=[0,0; 1,0; 0,1];C=[0,-1,0];D=[1,-5];G=ss(A,B,C,D)>> G1=tf(G)4.den=[1 1 0.16];num=[1 2 ];H=tf(num,den,'Ts',1,'ioDelay',2)5.>> z=[-1+j,-1-j];p=[0 0 -5 -6 -j j];>> G=zpk(z,p,8)5.2 z=tf('z',0.05);q=z^-1;H=((q+3.2)*(q+2.6))/q^5/(q-8.2);zpk(H)6.>> A=[1 2 3; 4 5 6; 7 8 0];B=[4; 3; 2];C=[1 2 3];D=zeros(1,1);G=ss(A,B,C,D);>> G1=tf(G)>> zpk(G1)7.1 s=tf('s');Go=(211.87*s+317.64)/(s+20)/(s+94.34)/(s+0.17);>> Gc=(169.6*s+400)/s/(s+4);H=1/(0.01*s+1);>> G=feedback(Go*Gc,H)>> G1=ss(G)>> zpk(G)7.2z=tf('z',1);q=z^-1;Go=(35786.7*q+108444)/(q+4)/(q+20)/(q+74);Gc=1/(q-1);H=1/(0.5*q-1);feedb ack(Go*Gc,H)>> G1=ss(G)>> G2=zpk(G)7.3 syms Km J B Kr Lq Rq Kv s>> G=Km*J/(J*s^2+B*s+Kr);Gc=Lq/(Lq*s+Rq),H=Kv*s;Gc =Lq/(Rq + Lq*s)feedback(G*Gc,H)ans =1/(Kv*s) - 1/(Kv*s*((J*Km*Kv*Lq*s)/((Rq + Lq*s)*(J*s^2 + B*s + Kr)) + 1))8.s=tf('s');G=10/(s+1)^3;Gpid=0.48*(1+1/(1.814*s)+0.4353*s/(1+0.04353*s));>> G0=feedback(Gpid*G,1)ss(G0)G2=minreal(G1)zpk(G0)9.>> A=[2.25 -5 -1.25 -0.5;2.25 -4.25 -1.25 -0.25;0.25 -0.5 -1.25 -1; 1.25 -1.75 -0.25 -0.75]; >> B=[4 6 ;2 4; 2 2;0 2];C=[0 0 0 1;0 2 0 2];D=zeros(2,2);>> G1=ss(A,B,C,D)G2=tf(G1)G3=c2d(G2,0.1,'tustin')>> G4=ss(G3)G5=d2c(G4) 不能够变回去10.s=tf('s');g11=-0.252/(1+3.3*s)^3/(1+1800*s);g12=0.43/(1+12*s)/(1+1800*s);>>g21=-0.0435/(1+25.3*s)^3/(1+360*s);g22=0.097/(1+12*s)/(1+360*s);>> G=[g11 g12;g21 g22]; Gc=[-10 77.5;0 50]; I=eye(2,2); G1=feedback(Gc*G,I)11>>s=tf('s');c1=(1/(s+1))*(s/(s^2+2));c2=(4*s+2)/(s+1)^2;c3=(s^2+2)/(s^3+14);c4=feedback(i/s^2,50) ;c5=feedback(c1,c2);G=3*feedback(c4*c5,c3)13clear allsyms G1 G2 G3 G4 G5 G6 H1 H2 H3 H4G23=feedback(G2*G3,H2);G45=feedback(G4*G5,H3);G7=feedback(G23*G45,H4/G2/G5);G=feedback(G1*G7*G6,H1)14clear alls=tf('s');g1=1/(1+0.01*s);g2=(1+0.17*s)/(0.085*s);g3=(1+0.15*s)/(0.051*s);g4=70/(1+0.0067*s);g5=0.21/(1+0.15*s);g6=130/s;h1=0.212;h2=0.1/(0.01*s+1);h3=0.0044/(1+0.01*s);G0=feedback(g5*g6,h1);G1=feedback(g4*g5*G0,h2/g6);G2=feedback(g2*g3*G1,h3);G=g1*G215.不能直接实现延迟系统可用PADE近似16.G=(s+1)^2*(s^2+2*s+400)/(s+5)^2/(s^2+3*s+100)/(s^2+3*s+2500)zpk(G);H1=c2d(G,0.01);H2=c2d(G,0.1);H3=c2d(G,1);>> step(G,'-',H1,'*r',H2,'o',H3,'-')>> step(G,'-k',H1,'-r',H2,'-y',H3,'-b')17 >> a=[-9 -26 -24 0;1 0 0 0;0 1 0 0;0 1 1 -1];b=[1;0 ;0 ;0];c=[0 1 1 2];d=[0];>> G=ss(a,b,c,d)minreal(G)2 states removed. 不是最小实现17.2 den=[1 10 35 50 24];num=[2 18 16];G=tf(den,num)minreal(G)第四章4011clear allnum=[1];den=[1 2 1 2];G=tf(num,den);pzmap(G)eig(G)%不稳定4012clear allnum=[1];den=[6 3 2 1 1];G=tf(num,den);pzmap(G)eig(G)%不稳4013clear allnum=[1];den=[1 1 -3 -1 2];G=tf(num,den); pzmap(G)eig(G)%不稳4014clear allnum=[3 1];den=[300 600 50 3 1];G=tf(num,den); pzmap(G)eig(G)%不稳4015clear alls=tf('s');G=0.2*(s+2)/(s*(s+0.5)*(s+0.8)*(s+3)+0.2*(s+2)); pzmap(G)eig(G) %稳定4021clear allnum=[-3 2];den=[1 -0.2 -0.25 0.05];H=tf(num,den,'Ts',1);pzmap(H)abs(eig(H)')% 稳定ans =0.5000 0.5000 0.20004022clear allnum=[3 -0.39 -0.09];den=[1 -1.7 1.04 0.268 0.024];H=tf(num,den,'Ts',1);pzmap(H)abs(eig(H)')ans =1.1939 1.1939 0.1298 0.1298 %不稳4023clear allnum=[1 3 -0.13];den=[1 1.352 0.4481 0.0153 -0.01109 -0.001043];H=tf(num,den,'Ts',1);pzmap(H)abs(eig(H)') %稳定ans =0.8743 0.1520 0.2723 0.2344 0.12304024clear allnum=[2.12 11.76 15.91];den=[1 -7.368 -20.15 102.4 80.39 -340];z=tf('z');q=z^-1;H=tf(num,den,'Ts',1,'Variable','q');pzmap(H)abs(eig(H)')%不稳4031clear allA=[-0.2 0.5 0 0 0;0 -0.5 1.6 0 0;0 0 -14.3 85.8 0;0 0 0 -33.3 100;0 0 0 0 -10];B=[0;0;0;0;30];C=[0 0 0 0 1];D=[0];G=ss(A,B,C,D)eig(A)'%稳定4032clear allA=[17 24.54 1 8 15;23.54 5 7 14 16;4 6 13.75 20 22.5889;10.8689 1.2900 19.099 ...21.896 3;11 18.0898 25 2.356 9];B=[1;2;3;4;5];C=[0 0 0 0 1];D=[0];G=ss(A,B,C,D)abs(eig(A)' %不稳404A=[-3 1 2 1;0 -4 -2 -1;1 2 -1 1;-1 -1 1 -2];B=[1 0;0 2;0 3;1 1];C=[1 2 2 -1;2 1 -1 2];D=zeros(2,2);G=ss(A,B,C,D);G1=tf(G)pzmap(G1)tzero(G1)405s=tf('s');G=0.2*(s+2)/(s*(s+0.5)*(s+0.8)*(s+0.3)+0.2*(s+2)); G1=ss(G);Gs=sscanform(G1,'obsv')Gs1=sscanform(G1,'ctrl')4061A=[0 1 1 1;0 0 0 1;0 1 0 0;0 0 1 1];B=[1 0;0 0;0 1;1 0];C=[1 0 0 0;0 1 0 0];D=zeros(2,2);Tc=ctrb(A,B);r1=rank(Tc)Tc1=obsv(A,C);r2=rank(Tc1)G=ss(A,B,C,D);Gs=canon(G,'model')T=luenberger(A,B);A1=inv(T)*A*TB=inv(T)*Bnorm(G)norm(G,inf)4062A=[0 2 0 0;0 1 -2 0 ;0 0 3 1;1 0 0 0];B=[2 0;1 2;0 1;0 0];C=[0 1 0 0;0 0 1 0];D=zeros(2,2);Tc=ctrb(A,B);r1=rank(Tc)Tc1=obsv(A,C);r2=rank(Tc1)G=ss(A,B,C,D);Gs=canon(G,'model')%T=luenberger(A,B);%A1=inv(T)*A*T%B=inv(T)*Bnorm(G)norm(G,inf)407A=[0 -3 0 0;1 -4 0 0;0 0 0 0;0 0 1 -2];B=[3 2;1 2; 1 1;1 1];C=[0 1 0 0;0 0 0 1];D=zeros(2,2);G=ss(A,B,C,D);G1=minreal(G)408f=@(t,x)[-5*x(1)+2*x(2);-4*x(2);-3*x(1)+2*x(2)-4*x(3)-x(4);-3*x(1)+2*x(2)-4*x(4)]; t_final=10;x0=[1 2 0 0];[t,x]=ode45(f,[0,t_final],x0);plot(t,x)409clear allnum=[18 514 5982 36380 122664 222088 185760 40320];den=[1 36 546 4536 22449 67284 118124 109584 40320];[r,p,k]=residue(num,den);[r p][n d]=rat(r);第五章502503504505506507用LTI模块,在工作空间中写出G的表达式。
计算机辅助设计(CAD)学习通课后章节答案期末考试题库2023年

计算机辅助设计(CAD)学习通课后章节答案期末考试题库2023年1.图块做好后,在插入时,是不可以放大或旋转的参考答案:错2.属于ProE中的草绘特征的是()参考答案:拉伸###旋转3.没有封闭的图形也可以直接填充参考答案:错4.DIMBASELINE(基线标注)命令用于从同一条基线绘制尺寸标注参考答案:对5.在光栅图形中关闭和打开图像边框的是IMAGE参考答案:对6.CAD的英文全称是:参考答案:Computer Aided Design7.在AutoCAD中保存文件的安全选项是:参考答案:口令和数字签名8.2.在设置点样式时可以()参考答案:选择【格式】【点样式】命令9.用缩放命令“scale”缩放对象时可以只在X轴方向上缩放参考答案:错10.将一个封闭的二维对象进行面域可以作用填充参考答案:对11.移动圆对象,使其圆心移动到直线中点,需要应用对象捕捉参考答案:对12.AutoCAD为了精确定位点,采用对象捕捉方式,有关对象捕捉的说法,下面错误的是?参考答案:对象捕捉不是命令,是一种状态,可以在“命令:”下直接输入。
13.默认图层为0层,它是可以删除的参考答案:错14.所有在AUTOCAD中生成的直线或曲线对象具有相同的特性参考答案:对15.使用“偏移命令”对原对象偏移后,其大小尺寸一定改变参考答案:对16.关于环形阵列的中心点的定义,说法有误的是()参考答案:极坐标定义17.下列哪种设备不是图形输入设备()参考答案:鼠标18.UCS图标仅是一个UCS原点方向的图形提示符参考答案:错19.在AutoCAD中无法使用透视方式观察三维模型参考答案:错20.单行文字的命令是()。
参考答案:DT21.从不同的起点绘制两条射线,必须调用RAY命令两次。
参考答案:对22.FILTER可以用来作为一个透明指令参考答案:对23.设置AUTOCAD图形边界的命令是参考答案:LIMITS24.以下属于可以着色的图形有:()参考答案:表面模型###实体模型25.在AutoCAD中可以给图层定义的特性不包括()参考答案:透明/不透明26.图形的复制命令主要有哪些?参考答案:复制(copy)、镜像(mirror)等27.下面哪种对象不能用于OFFSET偏移命令()参考答案:面域28.保存块的应用以下()操作参考答案:WBLOCK29.使用AutoCAD时,只能绘画简单的二维图纸,无法完成三维设计。
(完整版)《计算机辅助设计》练习题答案(可编辑修改word版)
一、单项选择题1.AutoCAD 用户图形文件默认的文件名后缀是( D )。
A.DWTB.DXFC.TXTD.DWG2.AutoCAD 与其他软件交换数据的文件名后缀是( B )。
A.DWTB.DXFC.TXTD.DWG3.AutoCAD 绘图时用户可以定义( A )个层。
A.256 个B.8 个C.64 个D. 1024 个4.不属于AutoCAD 中定义的层的属性是( A )。
A.角度B.名称C.颜色D.打印开关5.AutoCAD 的绘图界限(Limits)在绘图时( C )。
A.不能改变B.初始确定后不能改变C.可以随时改变D.不设定界限6.AutoCAD 设置绘图界限(Limits)的作用是( B )。
A.删除界限外的图形B.只能在界限内绘图C.使界限外的图形不能打印D.使光标不能移动到界限外7.AutoCAD 输入点坐标时,使用相对极坐标的格式为( D )。
A. @35,40B.35,40C.100<30D. @100<308.AutoCAD 输入点坐标时,使用极坐标的格式为( C )。
A. @35,40B.35,40C.100<30D. <100@309.AutoCAD 在标注尺寸时,尺寸端点的形式( C )。
A.必须是箭头B.必须是45 度短线C.可以在列表中选择D.不能选择10.AutoCAD 在标注尺寸时,尺寸端点的形式( C )。
A.两端必须一样B.必须是45 度短线C.可以在列表中选择D. 所有尺寸形式必须统一11.AutoCAD 在标注尺寸时,尺寸端点的大小( A )。
A.在对话框中修改B.自动改变C.随尺寸大小自动调整D.不能改变12.AutoCAD 在标注尺寸时,尺寸端点的大小( D )。
A.只能在标注样式中修改B.只能在特性管理对话框中修改C. 不能改变D.利用标注样式和特性管理对话框都可修改13.AutoCAD 绘图时用户可用的线型( D )。
计算机辅助设计试题及答案

一、单选题(每题3分,共60分)1、在3DSMAX中,工作的第一步就是要创建()。
A、类B、面板C对象D事件2、3DSMAX的工作界面的主要特点是在界面上以()的形式表示各个常用功能。
A、图形B、按钮C、图形按钮D、以上说法都不确切3、在3DSMAX中,()是用来切换各个模块的区域。
A、视图B、工具栏C命令面板D、标题栏4、()是对视图进行显示操作的按钮区域。
A、视图B、工具栏C、命令面板D、视图导航5、()是用于在数量非常多的对象类型场景中选取需要的对象类型,排除不必要的麻烦。
A、选择过滤器B选取范围控制C、选取操作D移动对象6、用来将一个物体附着在另外一个对象之上的控件是。
()A、Boolean (布尔B Conform (包裹)C、connect (链接) D scatter (离散)7、NURBS曲线造型包括()种线条类型。
A、1B、2 C 3 D、48、Splines样条线共有()种类型。
A、9B、10 C 11 D、129、设置倒角应使用。
()A、extrudeB、latheC、bevel D bevel profile10、设置油罐切面数应使用。
()A、Blend B Overall C、Centers D、Sides11、面片的类型有。
()A、圆形和椭圆形B圆形和四边形C、三角形和四边形D、圆形、随圆形、三角形和四边形12、在以下快捷键,选出不正确的()A、移动工具WB、材质编辑器MC、相机视图CD、角度捕捉A、Face Extrude B Surface Properties C、Mesh Smooth D、Edit Mesh14、编辑修改器产生的结果与()相关。
A、对象在场景中的位置B对象在场景中的方向C、对象的使用顺序D、对象在场景中是否移动15、下面关于编辑修改器的说法正确的是()A、编辑修改器只可以作用于整个对象B、编辑修改器只可以作用于对象的某个部分C、编辑修改器可以作用于整个对象,也可以作用于对象的某个部分D、以上答案都不正确16、噪波的作用是()A、对尖锐不规则的表面进行平滑处理B、用来修改此物体集合C、用于减少物体的定点数和面数D、使物体变得起伏而不规则17、当发现自己精心设计的对象在放入场景后,发现造型失真或物体间的边界格格不入,其原因可能是(A、三维造型错误B、忽视了灯光环境与摄像机C、材质不是很好D、以上管理都不正确18、能够显示当前材质球的材质层次结构的是()A、依据材质选择B、材质编辑器选项C、材质/贴图导航器D、制作预示动画19、单独指定要渲染的帧数应使用()A、SingleB、Active TimeC、Range D Frames20、下面说法中正确的是()A、不管使用何种规格输出,该宽度和高度的尺寸单位为像素B、不管使用何种规格输出,该宽度和高度的尺寸单位为毫米C、尺寸越大,渲染时间越长,图像质量越低D、尺寸越大,渲染时间越短,图像质量越低二、判断题(每题1分,共10分)1、粒子系统中创建的场景可以不使用动画记录按钮而被直接记录和播放。
2020年智慧树知道网课《计算机辅助设计》课后章节测试满分答案
绪论单元测试1【判断题】(10分)UG软件是SiemensPLMSoftware公司出品的一个产品工程解决方案。
A.错B.对第一章测试1【多选题】(1分)新建对话框中,单位下拉菜单对应()的类型?A.英寸B.全部C.毫米D.微米2【多选题】(1分)资源条包括上网导航、部件导航器等,可通过其左上角【设置】按钮,设置其为()状态。
A.隐藏B.保留C.悬挂D.删除3【单选题】(1分)快捷键Ctrl+B的组合,可执行()的操作。
A.根据类型显示或隐藏对象B.颠倒显示与隐藏的对象C.查看对象信息D.隐藏所选对象4【判断题】(1分)在使用点构造器时,若要前后两点建立关联性,需要在设置组中,勾选关联选项。
A.对B.错5【单选题】(1分)打开显示和隐藏对话框的快捷键的组合为()。
A.ctrl+wB.ctrl+SC.ctrl+BD.ctrl+I6【单选题】(1分)如果要编辑修改模型,可通过执行()操作来实现。
A.双击左键B.双击中键C.单击中键D.双击右键7【多选题】(1分)常用的UG工具包括()。
A.直线构造器B.点构造器C.矢量构造器D.平面构造器8【单选题】(1分)应用模块中的是()模块。
A.建模模块B.制图模块C.钣金模块D.外观造型设计模块9【判断题】(1分)该图标表示捕捉开关被打开,捕捉的是端点。
A.对B.错10【单选题】(1分)根据下图判断UG当前所处的模块为()。
A.加工B.建模C.钣金D.制图第二章测试1【多选题】(1分)草图平面创建类型为()和()。
A.在平面上B.基于草图C.在坐标系上D.基于路径2【判断题】(1分)可直接进入草图环境的草图创建方法是单击主页选项卡中草图命令。
A.错B.对3【判断题】(1分)在绘图区使用左键双击草图可对草图进行编辑。
A.错B.对4【判断题】(1分)在资源面板的部件导航器中,使用右击所选草图,在弹出的对话框中,选择编辑,可以把草图激活,再次进行修改。
A.错B.对5【判断题】(1分)单击约束组中下拉三角,如果命令前有勾,表示该命令已在工具栏中被调出。
计算机辅助设计答案

计算机辅助设计一、名词解释CAM-----计算机辅助制造。
消隐-----是指在三维图形显示中,选用合适的投影方法,消除实际上看不见的线或面给人以对图形的立体感。
1. 曲面造型一一是用有向棱边围成的部分来定义形体表面,由面的集合来定义形体。
2. CIMS――计算机集成制造系统,CIMS是在柔性制造技术、计算机技术、信息技术以及系统科学的基础上,将制造工厂的生产、经营活动所需的各种分布的自动系统通过简化、要素与标准化有机地集成起来,以获得适用与多品种,中小批量生产的高效益,高柔性的智能生产统。
3. 虚拟现实一一采用计算机技术生成的一个逼真的、具有视、听、触、嗅、味等多种感知的虚拟环境,置身于该环境中的人可以通过各种传感交互设备与这一虚拟的现实进行相互作用,达到彼此交替更迭,融为一体的程度。
4. 几何造型一一是一种技术,它能将物体的形状和属性存储在计算机内,形成该物体的三维几何模型。
5. CAPP――计算机辅助工艺设计简称CAPP是应用计算机快速处理信息功能和具有各种决策功能的软件来自动生产工艺文件的过程。
6. 逼近一一求出在几何形状上与给定型值点列的连接线相近似的曲线或曲面,称之为曲线或曲面的逼近。
7. 图形扫描仪一一是将图形(如工程图等)和图像(如照片、广告画等),经过光电扫描转换装置的作用,扫描输入到计算机中,以象素信息进行存储表示的一种输入设备。
8. 光顺一一光顺通俗的含义是指曲线的拐点不能太多,若太多,曲线看上去拐来拐去,很不顺眼。
9. AC系统一一是自动控制系统。
它是根据加工中测得的加工变量去控制切削速度和进给量的一个控制系统。
10. CAID一一计算机辅助工业设计,即在计算机及其相应的计算机辅助工业设计系统的支持下,进行工业设计领域的各类创造性活动。
二、填空1. 对参数方程处理的几种常用方法为插值、逼近、光顺、光滑、拟合。
2. CAD/ CAM技术的贡献具体表现在并行工程、虚拟新产品开发、实现CIMS的基础几个方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章1.1>>s=tf('s');G=(s^2+5*s+6)/(((s+1)^2+1)*(s+2)*(s+4))或者G=(s^2+5*s+6)/((s+1)^2+1)/(s+2)/(s+4)1.2 >> z=tf('z',0.1);H=5*(z-0.2)^2/(z*(z-0.4)*(z-1)*(z-0.9)+0.6)2.>> den=[1 10 32 32];num=[6 4 2 2];G=tf(num,den)>> zpk(G)3.A=[-1,1,0; 0,-1,-3; -1,-5,-3];B=[0,0; 1,0; 0,1];C=[0,-1,0];D=[1,-5];G=ss(A,B,C,D)>> G1=tf(G)4.den=[1 1 0.16];num=[1 2 ];H=tf(num,den,'Ts',1,'ioDelay',2)5.>> z=[-1+j,-1-j];p=[0 0 -5 -6 -j j];>> G=zpk(z,p,8)5.2 z=tf('z',0.05);q=z^-1;H=((q+3.2)*(q+2.6))/q^5/(q-8.2);zpk(H)6.>> A=[1 2 3; 4 5 6; 7 8 0];B=[4; 3; 2];C=[1 2 3];D=zeros(1,1);G=ss(A,B,C,D);>> G1=tf(G)>> zpk(G1)7.1 s=tf('s');Go=(211.87*s+317.64)/(s+20)/(s+94.34)/(s+0.17);>> Gc=(169.6*s+400)/s/(s+4);H=1/(0.01*s+1);>> G=feedback(Go*Gc,H)>> G1=ss(G)>> zpk(G)7.2z=tf('z',1);q=z^-1;Go=(35786.7*q+108444)/(q+4)/(q+20)/(q+74);Gc=1/(q-1);H=1/(0.5*q-1);feedb ack(Go*Gc,H)>> G1=ss(G)>> G2=zpk(G)7.3 syms Km J B Kr Lq Rq Kv s>> G=Km*J/(J*s^2+B*s+Kr);Gc=Lq/(Lq*s+Rq),H=Kv*s;Gc =Lq/(Rq + Lq*s)feedback(G*Gc,H)ans =1/(Kv*s) - 1/(Kv*s*((J*Km*Kv*Lq*s)/((Rq + Lq*s)*(J*s^2 + B*s + Kr)) + 1))8.s=tf('s');G=10/(s+1)^3;Gpid=0.48*(1+1/(1.814*s)+0.4353*s/(1+0.04353*s));>> G0=feedback(Gpid*G,1)ss(G0)G2=minreal(G1)zpk(G0)9.>> A=[2.25 -5 -1.25 -0.5;2.25 -4.25 -1.25 -0.25;0.25 -0.5 -1.25 -1; 1.25 -1.75 -0.25 -0.75]; >> B=[4 6 ;2 4; 2 2;0 2];C=[0 0 0 1;0 2 0 2];D=zeros(2,2);>> G1=ss(A,B,C,D)G2=tf(G1)G3=c2d(G2,0.1,'tustin')>> G4=ss(G3)G5=d2c(G4) 不能够变回去10.s=tf('s');g11=-0.252/(1+3.3*s)^3/(1+1800*s);g12=0.43/(1+12*s)/(1+1800*s);>>g21=-0.0435/(1+25.3*s)^3/(1+360*s);g22=0.097/(1+12*s)/(1+360*s);>> G=[g11 g12;g21 g22]; Gc=[-10 77.5;0 50]; I=eye(2,2); G1=feedback(Gc*G,I)11>>s=tf('s');c1=(1/(s+1))*(s/(s^2+2));c2=(4*s+2)/(s+1)^2;c3=(s^2+2)/(s^3+14);c4=feedback(i/s^2,50) ;c5=feedback(c1,c2);G=3*feedback(c4*c5,c3)13clear allsyms G1 G2 G3 G4 G5 G6 H1 H2 H3 H4G23=feedback(G2*G3,H2);G45=feedback(G4*G5,H3);G7=feedback(G23*G45,H4/G2/G5);G=feedback(G1*G7*G6,H1)14clear alls=tf('s');g1=1/(1+0.01*s);g2=(1+0.17*s)/(0.085*s);g3=(1+0.15*s)/(0.051*s);g4=70/(1+0.0067*s);g5=0.21/(1+0.15*s);g6=130/s;h1=0.212;h2=0.1/(0.01*s+1);h3=0.0044/(1+0.01*s);G0=feedback(g5*g6,h1);G1=feedback(g4*g5*G0,h2/g6);G2=feedback(g2*g3*G1,h3);G=g1*G215.不能直接实现延迟系统可用PADE近似16.G=(s+1)^2*(s^2+2*s+400)/(s+5)^2/(s^2+3*s+100)/(s^2+3*s+2500)zpk(G);H1=c2d(G,0.01);H2=c2d(G,0.1);H3=c2d(G,1);>> step(G,'-',H1,'*r',H2,'o',H3,'-')>> step(G,'-k',H1,'-r',H2,'-y',H3,'-b')17 >> a=[-9 -26 -24 0;1 0 0 0;0 1 0 0;0 1 1 -1];b=[1;0 ;0 ;0];c=[0 1 1 2];d=[0];>> G=ss(a,b,c,d)minreal(G)2 states removed. 不是最小实现17.2 den=[1 10 35 50 24];num=[2 18 16];G=tf(den,num)minreal(G)第四章4011clear allnum=[1];den=[1 2 1 2];G=tf(num,den);pzmap(G)eig(G)%不稳定4012clear allnum=[1];den=[6 3 2 1 1];G=tf(num,den);pzmap(G)eig(G)%不稳4013clear allnum=[1];den=[1 1 -3 -1 2];G=tf(num,den); pzmap(G)eig(G)%不稳4014clear allnum=[3 1];den=[300 600 50 3 1];G=tf(num,den); pzmap(G)eig(G)%不稳4015clear alls=tf('s');G=0.2*(s+2)/(s*(s+0.5)*(s+0.8)*(s+3)+0.2*(s+2)); pzmap(G)eig(G) %稳定4021clear allnum=[-3 2];den=[1 -0.2 -0.25 0.05];H=tf(num,den,'Ts',1);pzmap(H)abs(eig(H)')% 稳定ans =0.5000 0.5000 0.20004022clear allnum=[3 -0.39 -0.09];den=[1 -1.7 1.04 0.268 0.024];H=tf(num,den,'Ts',1);pzmap(H)abs(eig(H)')ans =1.1939 1.1939 0.1298 0.1298 %不稳4023clear allnum=[1 3 -0.13];den=[1 1.352 0.4481 0.0153 -0.01109 -0.001043];H=tf(num,den,'Ts',1);pzmap(H)abs(eig(H)') %稳定ans =0.8743 0.1520 0.2723 0.2344 0.12304024clear allnum=[2.12 11.76 15.91];den=[1 -7.368 -20.15 102.4 80.39 -340];z=tf('z');q=z^-1;H=tf(num,den,'Ts',1,'Variable','q');pzmap(H)abs(eig(H)')%不稳4031clear allA=[-0.2 0.5 0 0 0;0 -0.5 1.6 0 0;0 0 -14.3 85.8 0;0 0 0 -33.3 100;0 0 0 0 -10];B=[0;0;0;0;30];C=[0 0 0 0 1];D=[0];G=ss(A,B,C,D)eig(A)'%稳定4032clear allA=[17 24.54 1 8 15;23.54 5 7 14 16;4 6 13.75 20 22.5889;10.8689 1.2900 19.099 ...21.896 3;11 18.0898 25 2.356 9];B=[1;2;3;4;5];C=[0 0 0 0 1];D=[0];G=ss(A,B,C,D)abs(eig(A)' %不稳404A=[-3 1 2 1;0 -4 -2 -1;1 2 -1 1;-1 -1 1 -2];B=[1 0;0 2;0 3;1 1];C=[1 2 2 -1;2 1 -1 2];D=zeros(2,2);G=ss(A,B,C,D);G1=tf(G)pzmap(G1)tzero(G1)405s=tf('s');G=0.2*(s+2)/(s*(s+0.5)*(s+0.8)*(s+0.3)+0.2*(s+2)); G1=ss(G);Gs=sscanform(G1,'obsv')Gs1=sscanform(G1,'ctrl')4061A=[0 1 1 1;0 0 0 1;0 1 0 0;0 0 1 1];B=[1 0;0 0;0 1;1 0];C=[1 0 0 0;0 1 0 0];D=zeros(2,2);Tc=ctrb(A,B);r1=rank(Tc)Tc1=obsv(A,C);r2=rank(Tc1)G=ss(A,B,C,D);Gs=canon(G,'model')T=luenberger(A,B);A1=inv(T)*A*TB=inv(T)*Bnorm(G)norm(G,inf)4062A=[0 2 0 0;0 1 -2 0 ;0 0 3 1;1 0 0 0];B=[2 0;1 2;0 1;0 0];C=[0 1 0 0;0 0 1 0];D=zeros(2,2);Tc=ctrb(A,B);r1=rank(Tc)Tc1=obsv(A,C);r2=rank(Tc1)G=ss(A,B,C,D);Gs=canon(G,'model')%T=luenberger(A,B);%A1=inv(T)*A*T%B=inv(T)*Bnorm(G)norm(G,inf)407A=[0 -3 0 0;1 -4 0 0;0 0 0 0;0 0 1 -2];B=[3 2;1 2; 1 1;1 1];C=[0 1 0 0;0 0 0 1];D=zeros(2,2);G=ss(A,B,C,D);G1=minreal(G)408f=@(t,x)[-5*x(1)+2*x(2);-4*x(2);-3*x(1)+2*x(2)-4*x(3)-x(4);-3*x(1)+2*x(2)-4*x(4)]; t_final=10;x0=[1 2 0 0];[t,x]=ode45(f,[0,t_final],x0);plot(t,x)409clear allnum=[18 514 5982 36380 122664 222088 185760 40320];den=[1 36 546 4536 22449 67284 118124 109584 40320];[r,p,k]=residue(num,den);[r p][n d]=rat(r);第五章502503504505506507用LTI模块,在工作空间中写出G的表达式。