基于电动助力转向的车道保持系统_张海林
电动助力转向系统中助力电机的事件驱动反馈控制

反 馈 系统 中 的助 力 电 机 的 控 制 ,采 用事 件 驱动 反
馈 机 制 确 为 十 分 合 适 的 。具 体 助 力 电机 的事 件 驱 动 反馈 控制 系统 框 图如 图1 所示 。
简 称E C U) 控 制 , 表现 出较 多 的优 点 :节 约 燃 料 、 提 高主 动 安全性 和 环保 等 等 。在对E P S 系统 的研 究
出变 化 情 况 决 定 触 发事 件 的产 生 。具 体 地 ,为 系 统 的输 出变 化设 定 阈值A, 当系统 的 当前输 出与上
一
1 助力 电机事件驱动反馈控 制系 时 间 反 馈 控 制 机 制 下 ,计 算 机 控 制 器 单 元 对
受 控对 象 ( 助 力 电 机 )输 出 的 采 样 基 于 时 间 进 行 ,即 当前时 间 为给 定 周期T的倍数 时 进 行采 样 。
中 ,控 制 助 力 电 机 是 一 个 很 重 要 的研 究课 题 。助
力 电机 根 据 输 入 端 的 助 力 请 求 ,通 过 闭 环控 制 输 出所 要 求 的转 矩 。 目前 助 力 电机 的 控 制 系统 一 般 通 过 时 间驱 动 反 馈 机 制 进 行 控制 , 即通 过 定 时 对 系统 输 出进 行 采 样 ,将 采 样 值 传 回 控 制 器确 定 控
踪 性 能 具 有 决 定 性 的影 响 。 由于 控 制 的 目标 是 助 力 电机 的 输 出尽 快 跟 上 助 力请 求并 保 持 不 变 , 因
制 器 ,在 确保 闭环 控 制 系统 输 出性 能 的前 提 下 , 期望获 得 事件 驱动 反馈机 制 所具 有 的优势 。
此 合 理 的 触 发 事 件 产 生 机 制 是通 过 比较 系统 的输
智能车辆转向控制系统的研究

图 5-9 数据采集界面 ………………………………………………………………48 图 5-10 监测系统采集的一组数据……………………………………………………48
VI
附表清单
表 2-1 CS050LX 系列霍尔电流传感器及基本技术参数……………………………17
表 2-2 IR2110 的主要参数表 ………………………………………………………20 表 4-1 IRFZ44 电气特性表 …………………………………………………………35 表 4-2 电机运行状态与 MOSFET 关系 …………
The steering system has experienced many types such as mechanical steering hydraulic Power steering and electric Power steering which is Provides Power directly by electric motor .The power is controlled by ECU .which has many advantages such environmental protection, the low power as the adjusted power the good road feels, the consumes and the convenience maintaining and so on .It has the advantage which the traditional hydraulic power steering is impossible .So it is both a topic hotly talked in current vehicle technology and one of the top techniques. The subject of the development of regenerative braking controller hardware to Freescale the MC9S12DG128 as the control center, including data acquisition module, communication modules, control module. communication modules, including serial port and CAN interface; communication circuit; control module including DC motor circuit and exception handles circuit; Data acquisition module includes wheel speed sensor signal acquisition circuit, torque speed sensor signal acquisition circuit, DC motor signal circuit. And the hardware is verified through the testing. Lower computer program embedded C language, including system initialization module, data acquisition modules, communications modules, control modules. PC program written by VB6.0, include system initialization interface, data acquisition interface. Calibration interface will need to calibrate the parameters of transmission to the next bit machine can also view the lower machine operating parameters, data acquisition interface with the data, the curve of real-time rendering, and data storage. The controller software which divided into lower computer-controller and PC-PC machine two parts, connect o communications and data transmission through the USB-CAN card. The experiment proves that the testing system is feasible and effective Programmed and debugged the corresponding control Procedures. But during the research there are some problems were found needed to be improved and consummated further. Power steering, Design of hardware, Assist characteristic, Control Strategy, Key words: Data acquisition
全轮独立电驱动车辆双重转向控制策略的研究
全轮独立电驱动车辆双重转向控制策略的研究作者:范晶晶, 罗禹贡, 张海林, 李克强, Fan Jingjing, Luo Yugong, Zhang Hailin,Li Keqiang作者单位:范晶晶,Fan Jingjing(清华大学,汽车安全与节能国家重点实验室,北京,100084;中国北方车辆研究所,北京,100072), 罗禹贡,张海林,李克强,Luo Yugong,Zhang Hailin,LiKeqiang(清华大学,汽车安全与节能国家重点实验室,北京,100084)刊名:汽车工程英文刊名:AUTOMOTIVE ENGINEERING年,卷(期):2011,33(5)1.Wu Jianyong;Tang Houjun;Li Shaoyuan Improvement of Vehicle Handling and Stability by Integrated Control of Four Wheel Steering and Direct Yaw Moment 20072.Karbalaei R;Ghaffari A;Kazemi R Design of an Integrated AFS/DYC Based on Fuzzy Logic Control 20073.Wu Yihu;Song Dandan;Hou Zhixiang A Fuzzy Control Method to Improve Vehicle Yaw Stability Based on Integrated Yaw Moment Control and Active Front Steering 20074.Sohel Anwar Predictive Yaw Stability Control of a Brake-By-Wire Equipped Vehicle via Eddy Current Braking 20075.Kim Jeongnain;Kim Hyunsoo Electric Vehicle Yaw Rate Control Using Independent In-Wheel Motor 20076.贺鹏四轮独立驱动电动汽车的稳定性控制及其最优动力分配法 2007(04)本文链接:/Periodical_qcgc201105001.aspx。
基于电动助力转向系统的车辆主动悬架动力学仿真研究

基于电动助力转向系统的车辆主动悬架动力学仿真研究范长胜;郭艳玲【摘要】为了研究电动助力转向系统车辆主动悬架问题,通过建立1/4车辆模型和随机路面输入系统模型,进行了PID车辆主动悬架控制器的设计,在matlab/simulink环境中建立相应的系统仿真模型,并对不同路面情况下车身加速度曲线进行对比分析.通过仿真结果分析表明,应用PID控制策略设计的主动悬架系统,在车辆行驶平顺性和乘坐舒适性等方面都取得了很好的改善效果.【期刊名称】《节能技术》【年(卷),期】2014(032)003【总页数】4页(P241-244)【关键词】电动助力转向系统;车辆;主动悬架;PID控制器;仿真【作者】范长胜;郭艳玲【作者单位】东北林业大学机电工程学院,黑龙江哈尔滨150040;东北林业大学机电工程学院,黑龙江哈尔滨150040【正文语种】中文【中图分类】TH133电动助力转向(Electric power steering,EPS)和主动悬架(Active suspension system,ASS)是车辆的重要组成部分,直接影响到车辆行驶平顺性和操纵稳定[1-3]。
本文重点研究的是主动悬架系统,为电动助力转向系统研究提供理论依据和实验数据。
目前在汽车上应用较为广泛的是被动悬架系统,由于弹簧刚度和减振器阻尼系数不可调节,对不同的路面状况调节能力十分有限[1]。
因此,现代汽车大都希望安装能根据不同路况自动调节的电子控制悬架系统,它可根据不同路况来抑制不平路面造成的冲击,实时主动地调整和产生所需的悬架控制力,以抑制车身的振动,使悬架处于最优减振状态[4-5]。
它分为半主动式和主动式两大类。
主动式悬架可使汽车的悬架特性依据道路状况和行驶状态与之相适应,从而保证汽车行驶的平顺性、操纵的稳定性和乘坐舒适性。
1 系统模型建立1.1 主动悬架的动力学模型建立汽车悬架模型是进行性能分析和系统设计的基础。
车辆模型可简可繁,从二自由度的1/4车模型到复杂的七自由度整车模型都可以用来设计悬架。
汽车电动助力转向系统性能测试系统设计
汽车电动助力转向系统性能测试系统设计廖林清;石宏春;张君;王伟【摘要】根据汽车电动助力转向系统性能测试台架试验要求,采用VB6.0作为测试系统软件开发平台,以MPC08SP运动控制器作为交流伺服电机的上位控制单元对输入端转角、转速等进行控制,采用电液比例控制方式对输出端力、速度等进行加载,实现不同工况下转向阻力矩的模拟加载.最后对某技术成熟的电动助力转向系统进行性能测试.试验结果表明:该测试台架能稳定运行、测试精度高,可快速地实现电动助力转向系统自动化测试.%According to EPS performance test bench test requirements,VB6.0 is used as the test system software development platform,MPC08SP motion controller is used as the upper control unit of AC servo motor to realize input end drive control, and electro-hydraulic proportional control technology is used to realize the output end Drive control to realize the simulation loading of the performance of the electric power steering system in different working conditions.Finally,through a performance test of a mature electric power steering system technology.The test results show that the test system can operate stably with high test accuracy,and can quickly realize the automated testing of the electric power steering system.【期刊名称】《重庆理工大学学报(自然科学版)》【年(卷),期】2018(032)006【总页数】6页(P41-46)【关键词】电动助力转向系统;电液比例控制;性能测试;助力特性【作者】廖林清;石宏春;张君;王伟【作者单位】汽车零部件先进制造技术教育部重点实验室,重庆 400054;汽车零部件先进制造技术教育部重点实验室,重庆 400054;重庆理工大学机械工程学院,重庆400054;重庆理工大学机械工程学院,重庆 400054【正文语种】中文【中图分类】U463电动助力转向系统(electric power-assistant sterring,EPS)相比液压助力转向系统更节能、环保,并能兼顾汽车低速转向轻便性和高速直线行驶稳定性,因此得到了广泛的应用,是当前动力转向技术研究的主要方向。
一种电动助力制动方法和制动系统[发明专利]
![一种电动助力制动方法和制动系统[发明专利]](https://img.taocdn.com/s3/m/f0bb54e0763231126fdb1158.png)
专利名称:一种电动助力制动方法和制动系统专利类型:发明专利
发明人:田佰辉,刘海珍,陶喆,张万里,夏玲,陈进申请号:CN201910906805.5
申请日:20190924
公开号:CN110588616A
公开日:
20191220
专利内容由知识产权出版社提供
摘要:本发明实施例公开了一种电动助力制动方法和制动系统。
该电动助力制动方法包括:确定制动踏板归回制动踏板零位;驱动液压齿条向液压齿条零位移动,直至液压齿条的移动速度降至零位速度阈值且持续时间为预设零位持续时间;标定当前液压齿条位置为上电默认机械零位;在确定制动踏板离开制动踏板零位后,以上电默认机械零位为液压齿条零位,将制动踏板行程转换为齿条行程,以驱动活塞进行液压制动。
本发明解决了现有电动助力制动系统中需要单独设置齿条的位移传感器的问题,实现了在每次制动后调整液压齿条至液压齿条零位,对液压齿条零位进行重新标定,保证液压齿条驱动产生准确的液压制动力,同时简化制动系统结构,降低制动系统装配的复杂度。
申请人:上海拿森汽车电子有限公司
地址:200120 上海市浦东新区金海路1000号16号楼702室
国籍:CN
代理机构:北京品源专利代理有限公司
代理人:孟金喆
更多信息请下载全文后查看。
汽车车道保持辅助系统关键技术的国内外研究现状
引言截至2016年底,我国机动车保有量达2.9亿辆,其中汽车1.94亿辆;机动车驾驶人3.6亿人,其中汽车驾驶人超过3.1亿人。
可见,中国已经成为名副其实的汽车大国。
随着我国经济的持续快速发展,汽车保有量仍然呈快速增长趋势。
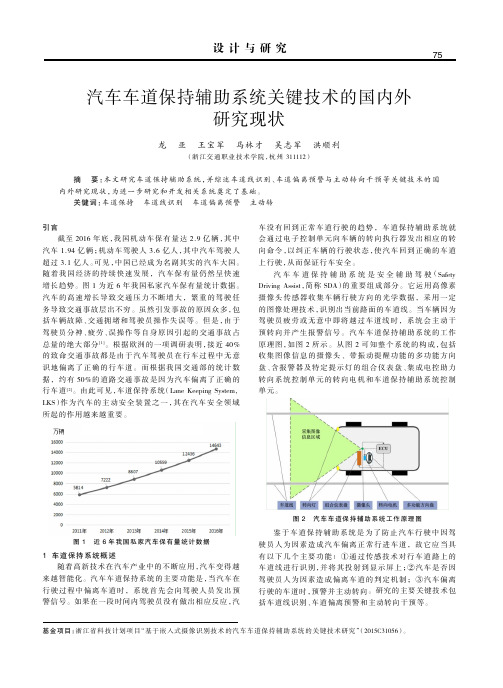
图1为近6年我国私家汽车保有量统计数据。
汽车的高速增长导致交通压力不断增大,繁重的驾驶任务导致交通事故层出不穷。
虽然引发事故的原因众多,包括车辆故障、交通拥堵和驾驶员操作失误等。
但是,由于驾驶员分神、疲劳、误操作等自身原因引起的交通事故占总量的绝大部分[1]。
根据欧洲的一项调研表明,接近40%的致命交通事故都是由于汽车驾驶员在行车过程中无意识地偏离了正确的行车道。
而根据我国交通部的统计数据,约有50%的道路交通事故是因为汽车偏离了正确的行车道[2]。
由此可见,车道保持系统(Lane Keeping System, LKS)作为汽车的主动安全装置之一,其在汽车安全领域所起的作用越来越重要。
1车道保持系统概述随着高新技术在汽车产业中的不断应用,汽车变得越来越智能化。
汽车车道保持系统的主要功能是,当汽车在行驶过程中偏离车道时,系统首先会向驾驶人员发出预警信号。
如果在一段时间内驾驶员没有做出相应反应,汽车没有回到正常车道行驶的趋势,车道保持辅助系统就会通过电子控制单元向车辆的转向执行器发出相应的转向命令,以纠正车辆的行驶状态,使汽车回到正确的车道上行驶,从而保证行车安全。
汽车车道保持辅助系统是安全辅助驾驶(Safety Driving Assist,简称SDA)的重要组成部分。
它运用高像素摄像头传感器收集车辆行驶方向的光学数据,采用一定的图像处理技术,识别出当前路面的车道线。
当车辆因为驾驶员疲劳或无意中即将越过车道线时,系统会主动干预转向并产生报警信号。
汽车车道保持辅助系统的工作原理图,如图2所示。
从图2可知整个系统的构成,包括收集图像信息的摄像头、带振动提醒功能的多功能方向盘、含报警器及特定提示灯的组合仪表盘、集成电控助力转向系统控制单元的转向电机和车道保持辅助系统控制单元。
电动液压助力转向系统的节能优化研究

第35卷第3期2019年5月森林工程FO REST ENGINEERINGV ol.35 N o.3M ay,2019电动液压助力转向系统的节能优化研究夏雨,张涌$,吴海啸,姜朋昌(南京林业大学汽车与交通工程学院,南京21003)摘要:针对某型纯电动商用汽车的EHPS,在传统常流式EHPS基础上提出一种新型的常压式EHPS系统。
这种系统在传统常流式EHPS系统的基础上加装了蓄能器和电磁阀等结构,取代了电机和液压泵的持续工作状态,使系统既能满足转向助力的需求,又能减轻能量的耗损,实现系统的节能优化。
根据系统性能对其关键部件进行合理的选型和计算;基于助力需求选择合适的助力特性曲线形式,并在MATLAB曲线拟合工具箱中进行基于车速系数的助力特性的曲线拟合;根据助力特性确立系统控制的方法;在M ATLAB/sim ulink软件中对常压式EHPS进行建模,对系统的助力响应、控制性能和助力跟随性进行仿真分析,并对能耗进行计算。
仿真得到的结果表明,这种常压式EHPS能够达到转向助力性和节能性的双重要求。
关键词:常压式EHPS;助力特性;建模与仿真中图分类号:U463.4 文献标识码:A文章编号:1006 -8023(2019)03 -0093 -07Study on Energy Saving Optimization of Electric HydraulicPower Steering SystemXIA Yu , ZHANG Yong* , WU Haixiao , JIA.NG Pengchang(College of A u to m o b ile an d Traffic Engin eerin g,N an jin g Fo restry U n iversity,N an jin g210037)A bstract:For EH PS of a p u re electric co m m ercial vehicle,a co n stan t p ressure ty p e EH PS h as been p r sta n t flo w typ e EHPS.This s ystem h as b een in stalled an accu m u lato r an d so len o id valve o n th e basis of th e trad itio n al co n stan t flo w typ e EH PS,w h ich replaces th e co n tin u o u s w o rk in g sta te of th e m o to r an d hydraulic pu m p.This system can n o t o n ly m eet th e n eed s o f steerin g p o w er,b u t also red u ce en ergy co n su m p tio n an d realize en ergy- savin g o p tim iz atio n of th e system.A ccordin g to th e system perfo rm an ce,th e key co m p o n en ts h ave b een selected an d calculated reasonably;ch o o se th e ap p ro p riate assist ch aracteristic curve fo rm based o n th e assist d em an d,an d p erfo rm curve fittin g of assist characteristic b ased o n th e vehicle speed coefficien t in M A TLAB cu rve fittin g toolbox;th e m e th o d of system c o n tro l h as b een establish ed acco rd in g to th e assist characteristic;th e co n stan t p ressure ty p e EH PS h as b een m o d eled i n M ATLAB/sim ulink softw arr,an d th e system’s assist response,c o n tro l p erfo rm an ce an d p o w er- fo llo w in g perfo rm an ce h ave b een sim u lated an d an alyzed,an d th e en ergy co n su m p tio n h as also b een calcula co n stan t p ressure ty p e E H PS can m eet th e d u al req u irem en ts of steerin g assist an d en ergy saving.Keywords:C o n sta n t p ressure typ e EHPS;assist characteristic;m o d elin g an d sim u latio n〇引言转向系统对车辆的性能影响十分显著,对该系 统的研究和改进会提高系统的整体性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键词: 车道保持; 协调控制; 仿真; 硬件在环实验; 电动助力转向
Lane Keeping System Based on Electric Power Steering System
Zhang Hailin,Luo Yugong,Jiang Qingyun & Li Keqiang
Tsinghua University,State Key Lab of Automotive Safety and Energy,Beijing 100084
整车质量 横摆惯量 轮距 质心至前轴距离 质心至后轴距离 前轮转动惯量 后轮转动惯量 车轮半径
图6
驾驶员模型示意图
f( t) 为预期的轨迹中 图 6 中 xoy 为固定坐标系, T 为预瞄时间, y( t) 为车辆当前坐标。 心线方程, 为跟踪 f( t) , 最优的转向盘转角为 2 i ·L · f( t + T) - y ( t) - T· y ( t) ] δ= 2 [ d
因此在设计控制策略时必须考虑驾驶员的操作行 为。通过综合判断跨道时间与驾驶员操作行为, 决 定 EPS 是工作在常规助力模式下, 还是响应来自车 道保持控制器的命令, 实现协调控制。 基于上述思想, 本文中建立了基于 EPS 的车道 如图 1 所示。 虚线框内是车 保持系统的总体结构, 道保持控制系统。路面环境信息和驾驶员信息输入 经过计算后得到车辆的状态参数。 结 给整车模型, 通过综合驾 合之前的路面信息和驾驶员输入信息, 驶员行为和跨道时间来判断车辆是否有发生车道偏 离的危险。如果有发生车道偏离的危险, 通过侧向 驾驶员模 型 计 算 得 到 转 角 命 令, 再 通 过 PID 得 到 PWM 信号, 由助力电机执行, 产生相应的前轮转角, 使车辆维持在车道线之间; 如果没有发生车道偏离 EPS 系统工作在常规助力模式下。 的危险,
[6 - 7 ] [5 ] · x ·
( 1)
图4
仿真系统框图
模型综合驾驶员操作与跨道时间信息, 决定 EPS 工 作在常规助力模式还是车道保持模式 。 若系统处于 车道保持模式, 侧向驾驶员模型计算得到目标转向 输入给 EPS 模型, 完成整个控制过程。 盘转角, 3. 1 车辆模型 选取车辆纵向、 侧向、 横摆和 4 个车轮转动总共 7 个自由度, 建立 7 自由度整车模型。 整车模型如图 5 所示, 参数列于表 1 。
。 模型示意图见
图5
7 自由度整车模型示意图
表1
参数 m Jz d a b JF JR r 含义
7 自由度整车模型参数含义
参数 vx vy ωz ω11 , ω12 , ω21 , ω22 δ F x11 , F x12 , F x21 , F x22 F y11 , F y12 , F y21 , F y22 T D11 , T D12 T B11 , T B12 , T B21 , T B22 含义 x 方向速度 y 方向速度 横摆角速度 车轮角速度 前轮转角 轮胎纵向力 轮胎侧向力 车轮驱动力矩 车轮制动力矩
· 528 ·
汽
车
工
程
2013 年( 第 35 卷) 第 6 期
7 自由度整车模型微分方程为 m( v - vy ωz ) = ∑ Fx = ( Fx11 + Fx12 ) cosδ - ( Fy11 + Fy12 ) sinδ + Fx21 + Fx22 · · m( vy + vx ωz ) = ∑ Fy = ( Fx11 + Fx12 ) sinδ + ( Fy11 + Fy12 ) cosδ + Fy21 + Fy22 · J ω = M =[ ( Fx12 - Fx11 ) cosδ + ( Fy11 - Z z ∑ z d d Fy12 ) sinδ] + ( Fx22 - Fx21 ) + 2 2 [ ( Fy11 + Fy12 ) cosδ + ( Fx11 + Fx12 ) sinδ] · a - ( Fy21 + Fy22 ) b · JF ω11 = ∑ My11 = TD11 - TB11 - Fx11 r · JF ω12 = ∑ My12 = TD12 - TB12 - Fx12 r · JR ω21 = ∑ My21 = - TB21 - Fx21 r · JR ω22 = ∑ My22 = - TB22 - Fx22 r 3. 2 轮胎模型 采用魔术轮胎模型 , 其一般公式为 y( x) = Dsin{ C arctan[ B( x + S h ) ( 1 - E) + E arctan( B ( x + S h ) ) ] } + Sv ( 2) 式中: D 为峰值因子; C 为形状因子; B 为刚度因子; E 为曲率因子; S h 为横向补偿量; S v 为纵向补偿量; y( x) 代表纵向力、 侧向力或回正力矩。 3. 3 侧向驾驶员模型 采用单点预瞄驾驶员模型 图 6。
( 3)
式中: δ 为最优转向盘转角; i 为转向系传动比; L 为 轴距; d 为预瞄距离。 在车道保持控制过程中, 若发生车道偏离, 给定
2013 ( Vol. 35 ) No. 6
张海林, 等: 基于电动助力转向的车道保持系统
· 529 ·
车道中心线及相关参数, 通过上述侧向驾驶员模型 可以计算得到目标转向盘转角, 根据目标转向盘转 通过 PID 控制器后得 角与实际转向盘转角的差值, 到 PWM 信 号, 由 助 力 电 机 执 行, 完成车道保持过 程。 3. 4 EPS 系统模型[8 - 9] EPS 系 转向管柱助力式 EPS 结构如图 7 所示, 统模型参数均标注于图 7 中, 参数含义列于表 2 。
[1]
前言
。 车道保持系统的功能在于能够使
规助力功能, 不存在协调控制问题。 针对上述协调控制问题, 提出一种综合考虑跨 道时间
[1 ]
车辆 维 持 在 正 确 的 车 道 上 , 保证驾驶员的行车
与驾驶员操作行为判断的车道保持协调控
制方法。该方法结合了跨道时间计算与驾驶员操作 状态判断方法。在此基础上, 搭建了车道保持模型、 7 自由度整车模型和 EPS 模型, 魔术轮胎模型、 并进 行仿真。随后在 EPS 实验台上进行车道保持协调控 制硬件在环实验。 仿真及硬件在环实验结果表明, 所设计的车道保持协调控制方法能够通过判断驾驶 决定 EPS 是实现常规助力转向 员行为和车辆状态, 还是响应来自车道保持控制器的命令, 实现二者协 调控制, 确保行车安全。
[ Abstract] For integrating electric power steering system and lane keeping system,a lane keeping coordinated control method combining time to lane cross and driver's operating behavior judgment is proposed. On the basis of theoretical analysis, lane keeping system model, Magic Formula tire model, 7DOF vehicle model and EPS model are built. Both simulation and hardwareintheloop experiment are conducted. The results show that the lane keeping coordinated control method proposed can solve the coordination issue between conventional EPS component and lane keeping executive component,and keep the vehicle within the lane,ensuring the driving safety of vehicle. Keywords: lane keeping; coordinated control; simulation; hardwareintheloop experiment; EPS 保持系统, 但均未涉及 EPS 作为常规助力转向部件 4] 中 与车道保持执行部件之间的协调问题。 文献[ 为车道保持系统单独设计了转向机构, 该机构无常 据统计 , 近 40% 的 致 命 交 通 事 故 是 由 于 车 道 偏离造成的 安全 。 电动助力转向 ( electric power steering,EPS ) 系 基于 EPS 的 统具有节能和结构简单等一系列优点, 车道保持系统能够实现 EPS 系统的结构共用, 降低 车道保持系统设计成本。 EPS 既是常规 在基于 EPS 的车道保持系统中, 助力转向部件, 又是车道保持执行部件。 二者之间 的协调控制是研究的关键。 2] 3] 文献[ 和文献[ 中研究了基于 EPS 的车道
2013 年( 第 35 卷) 第 6 期
汽 车 工 程 Automotive Engineering
2013 ( Vol. 35 ) No. 6
2013100
基于电动助力转向的车道保持系统
张海林, 罗禹贡, 江青云, 李克强
( 清华大学, 汽车安全与节能国家重点实验室, 北京 100084 )
*
[ 摘要] 为集成电动助力转向系统与车道保持系统, 提出了一种结合跨道时间与驾驶员操作行为判断的车道 7 自由度整车模型和 EPS 模型, 保持协调控制方法。在理论分析的基础上搭建了车道保持模型 、 魔术轮胎模型、 并 进行仿真和硬件在环实验 。结果表明, 所设计的车道保持协调控制方法能解决 EPS 部件与车道保持执行部件之间 的协调问题, 将车辆维持在两车道线之间, 保证车辆的行驶安全性 。