驱动实例2
2对话框驱动及应用实例
2)等腰梯形对话框驱动程序(dytx.lsp)
(defun c:tx (/ id)
(setq id (load_dialog "d:\\shili\\dytx"))
(if (< id 0) (exit))
(if (not (new_dialog "dytx" id)) (exit))
(image1 "tx1" "d:\\shili\\dytx")
功能:开始对话框并接受用户输入。在调用 该函数之前,你必须通过(new_dialog)函数来 初始化。同时这个对话框必须在一个动作表 达式或一个返回函数调用(done_dialog)函数之 前,一直保持激活状态。
17) start_image函数
格式:(start_image 控件操作名)
功能:在图像控件中开始建立图像。应当与 函数(end_image)成对使用,在这两个函数之 间可以调用(fill_image), (slide_image)和 (vector_image)等函数建立图像。
(done_dialog)") (start_dialog) (unload_dialog id) (if (> what 0) (draw_zdbx n r flag)) );end
带圆正多边形绘图及数据读取函数
(defun draw_zdbx (n r flag)
(setq bp (getpoint "\nBase point:"))
} ok_cancel; }
2) 对话框驱动程序设计(htf.lsp)
例2、 带圆正多边形对话框驱动
1) 对话框设计程序(zdbx.dcl)
lcd液晶驱动2
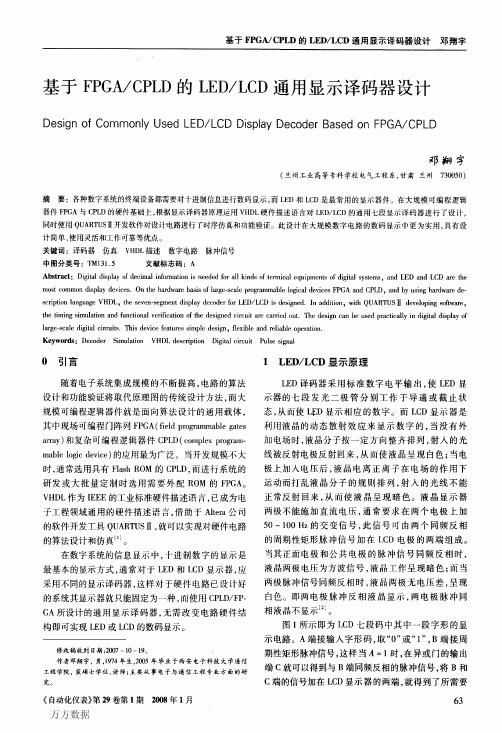
图4译码器LED模式仿真波形
Fig.4 Emulation wav@form of decoder in LED mode
[2]李维程,郭强.液晶显示应用技术[M].北京:电子工业出版 社,2000:339—344.
[3]刘润华,单亦先.电子设计自动化[M].东营:石油大学出版
社,2001:127一134.
的方波信号,其电压是脉冲信号的两倍,因而显示器显 示字形;而当A=0时,异或门输出脉冲信号C与其输 入信号B同频同相,从而使LCD显示器的两端电压为 0,显示器呈白色而不显示字形。
…时: ]n厂
n几
黑
公共电极
图1 液晶驱动电路及电极波形
Fig.1 LCD drive circuit and electrode waveforms
在数字系统的信息显示中,十进制数字的显示是 最基本的显示方式,通常对于LED和LCD显示器,应 采用不同的显示译码器,这样对于硬件电路已设计好 的系统其显示器就只能固定为一种,而使用CPLD/FP— GA所设计的通用显示译码器,无需改变电路硬件结 构即可实现LED或LCD的数码显示。
修改稿收到日期:2007—10—19。 作者邓翔宇,男,1974年生,2005年毕业于西安电子科技大学通信 工程学院,获硕士学位,讲师;主要从事电子与通信工程专业方面的研 究。
基于FPGA/CPLD的LED/LCD通用显示译码器设计邓翔宇
基于FPGA/CPLD的LED/LCD通用显示译码器设计
Design of Commonly Used LED/LCD Display Decoder Based OR FPG芦/CPLD
邓翔穹
(兰州工业高等专科学校电气工程系,甘肃兰州730050)
继电器驱动电路 (2)
继电器驱动电路
继电器驱动电路是一种电子电路,用于通过控制信号来驱动继电器的开关操作。
一个基本的继电器驱动电路通常包含以下几个组成部分:
1. 控制信号输入部分:控制信号可以是来自于微控制器、开关、传感器等。
该信号用于触发继电器的开关动作。
2. 驱动电路:该部分负责将控制信号进行适当的电平转换和放大,以满足继电器的工作电压和电流要求。
3. 继电器:继电器是一个电磁开关,用于在控制信号作用下开关连接或切断电路。
它由线圈和触点组成。
4. 继电器电源:继电器通常需要一定的电源电压才能正常工作。
电源可以是直流电源或交流电源,具体取决于继电器的类型和规格。
基本的继电器驱动电路可以使用普通的NPN晶体管作为驱动元件。
当控制信号为高电平时,晶体管导通,线圈电流通过晶体管和继电器的线圈。
这导致继电器的触点闭合。
当控制信号为低电平时,晶体管不导通,线圈电流截断,继电器的触点打开。
,还可以使用继电器驱动芯片或专用
的继电器驱动模块来简化电路设计并提高可靠性。
这些驱动模块通常具有保护电路,可防止对继电器和控制信号的损坏。
需要注意的是,在设计继电器驱动电路时,应确保继电器的额定电压和电流符合所需应用的要求,并使用适当的保护电路来保护继电器和其他电路免受过电流、过电压等问题的影响。
实验二:字符设备驱动实验

实验二:字符设备驱动实验一、实验目的通过本实验的学习,了解Linux操作系统中的字符设备驱动程序结构,并能编写简单的字符设备的驱动程序以及对所编写的设备驱动程序进行测试,最终了解Linux操作系统如何管理字符设备。
二、准备知识字符设备驱动程序主要包括初始化字符设备、字符设备的I/O调用和中断服务程序。
在字符设备驱动程序的file_operations结构中,需要定义字符设备的基本入口点。
open()函数;release()函数read()函数write()函数ioctl()函数select()函数。
另外,注册字符设备驱动程序的函数为register_chrdev()。
register_chrdev() 原型如下:int register_chrdev(unsigned int major, //主设备号const char *name, //设备名称struct file_operations *ops); //指向设备操作函数指针其中major是设备驱动程序向系统申请的主设备号。
如果major为0,则系统为该驱动程序动态分配一个空闲的主设备号。
name是设备名称,ops是指向设备操作函数的指针。
注销字符设备驱动程序的函数是unregister_chrdev(),原型如下:int unregister_chrdev(unsigned int major,const char *name);字符设备注册后,必须在文件系统中为其创建一个设备文件。
该设备文件可以在/dev目录中创建,每个设备文件代表一个具体的设备。
使用mknod命令来创建设备文件。
创建设备文件时需要使用设备的主设备号和从设备号作为参数。
阅读教材相关章节知识,了解字符设备的驱动程序结构。
三、实验内容根据教材提供的实例。
编写一个简单的字符设备驱动程序。
要求该字符设备包括open()、write()、read()、ioctl()和release()五个基本操作,并编写一个测试程序来测试所编写的字符设备驱动程序。
2路电机驱动模块的使用方法
2路电机驱动模块的使用方法
2路电机驱动模块的使用方法主要包括以下步骤:
1. 硬件连接:将双路直流电机驱动模块的VCC和GND引脚连接到外部电
源的正负极上,电压范围为5V-12V。
将直流电机的正极连接到M+和M-
引脚上,负极连接到M-和M+引脚上。
将控制板的IO口与模块的IN1、
IN2、IN3、IN4引脚相连,其中IN1和IN2控制第一个电机,IN3和IN4
控制第二个电机。
2. 参数设置:通过控制器或者其他设备,设置双路电机驱动模块的控制参数,如速度、位置、转矩等。
根据实际需求,调整参数以实现所需的运动控制效果。
3. 启动电机:通过控制器或者其他设备,启动双路电机驱动模块,开始控制两个电机的运动。
实时监测电机的状态,根据需要进行调整和优化。
双路电机驱动模块在各个领域都有广泛的应用。
在工业自动化中,可以用于控制机械臂、输送带等设备的运动;在机器人领域,可以用于控制机器人的各个关节的运动;在医疗设备中,可以用于控制手术机器人、医疗影像设备等的运动。
双路电机驱动模块的使用可以提高设备的精确性、稳定性和效率。
以上内容仅供参考,建议咨询专业人士获取更准确的信息。
实验2 PT4115 降压式 LED 恒流驱动

实验2 PT4115 降压式LED 恒流驱动1、实验目的1) 了解降压式(Buck)LED 恒流驱动电路的工作原理。
2) 掌握PT4115 的恒流特性及其外围电路元件的计算和选择方法。
3) 掌握不同的输入电压下电路的效率测试方法。
4) 熟练电子元器件的安装焊接次序和方法技巧。
2、实验材料、仪器与用具PCB 板、元器件、焊锡丝、导线;电烙铁、镊子、稳压限流直流电源、VC890C+数字万用表(测试元件)、台式数字万用表(测量电流)、指针式电压表、LED 灯板。
图s2-1PT4115 降压式LED 恒流驱动及其PCB 布局材料清单如下表:3、实验原理1)PT4115:是一款连续电感电流导通模式的降压恒流源IC,用于驱动一颗或多颗串联LED。
本实验采用SOT89-5 贴片式封装驱动芯片。
2)管脚功能SW: 功率开关管漏极GND: 信号和功率地DIM:开关使能、模拟和PWM 调光CSN:电流采样端,采样电阻接在CSN 和VIN 端之间VIN: 电源输入端,必须就近接旁路电容Exposed PAD: 散热端,内部接地,贴在PCB 板上减小热阻3)PT4115 典型应用电路原理PT4115 和电感(L)、电流采样电阻(Rs)形成一个自振荡的连续电感电流模式的降压型恒流LED 驱动器。
VIN 上电时,电感(L)和电流采样电阻(Rs)的初始电流为零。
LED 输出电流也为零。
这时,CS 比较器的输出为高电平,内部功率开关导通,SW 电位为低。
电流通过电感(L)、电流采样电阻(Rs)、LED 和内部功率开关从VIN 流到GND,电流上升的斜率由VIN、电感(L)和LED 压降决定,在Rs 上产生一个压差Vcsn。
当(Vin-Vcsn)>115mV 时,CS 比较器输出变为低,内部功率开关关断,电流以另一种斜率(下降)流过电感(L)、电流采样电阻(Rs)、LED 和肖特基二极管(D)。
当(Vin-Vcsn)<85mV时功率开关重新打开,这样使得LED 上的平均电流为:本实验设计的LED 灯为可以PWM 调光的类型,恒流最大值为167mA,因此算得的电流采样电阻约0.6 欧,可选取2 只1.2 欧的电阻并联。
2相步进马达驱动器(不错)

9
ACC VR
旋轉調整
調整脈波加速時間
出廠設定值:50%
10 DEC VR
旋轉調整
調整脈波減速時間
出廠設定值:0%
11
M1 SW
12
M2 SW
步進角切換
M1 M2 M1 M2 M1 M2 M1 M2
ON ON OFF ON ON OFF OFF OFF 以全步進 以半步進方 以 1/4 步進 以 1/8 步進
MOTOR
驅動器之馬達端子
各廠牌 2 相步進馬達接線對照表
●4 出線馬達接法
馬達結線對照表
相位
A
/A
B
/B
廠牌
Tamagawa
藍
紅
白
黃
(多摩川)
OM
黑
綠
紅
藍
(東方馬達)
山洋電氣
橙
藍
紅
黃
4 出線 2 相步進馬達內部結線圖
●6 出線馬達接法
馬達結線對照表
相位
A COM /A
廠牌
Tamagaw (多摩川)
7
TR21PM-NK-V04
2 相步進馬達驅動器 使用說明書
5.使用方法
先根據需求選擇步進方式(指撥開關 M1、M2),並將指撥開關 ACD 撥至 ACD 位置。
模拟量控制驱动器 (2)
请在连接之前检查电源电压和容量!
驱动器可与下列阀体配合使用: - 阀 体 类 型 VFM、VFS (DN 65-100)、VFG(S)、
VFU、VF (DN 100-150) 和 VL (DN 100)。 - 动态平衡型电动调节阀(一体阀)AFQM 6 和
4-20 mA(电流输入)。
- 0-10V;输入信号的范围为 0-10 V(电压输入)或
者 0-20 mA(电流输入)。
信号范围选择开关设定同时包括 输入 Y 和反馈
X 信号。
DIP4:LIN/MDF – 改变调节特性功能(图3):
- 线性(LIN):Y 信号与阀门行程之间为线性关系
- 流量修正(MDF):Y 信号和阀杆行程之间的关系
取决于电位计 CM 的设置。
该功能可变更 MCV(阀门和驱动器)特征(例如
线性响应变成对数响应,反之亦然),并且可用于
SN 0 V SP 24, 230 V AC/DC
4
4, 5 SP(AC)
SP
5
1
INV
SP
2
3
DIR
GND 0 V 0(2)-10 V
Y 0(4)-20 mA 0(2)-10 V
X 0(4)-20 mA
AME 655
DIP 6 关闭(1a, 1b) DIP 6 打开(2a, 1b)
公共端 电源 SP 输出 - 最大 4A - 最小 3W
闪烁(1s 间隔) 设置行程限制(伸出阀杆)
无电源
DEN-SMT/SI
VD.LE.T4.41 © Danfoss 12/2014
7
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Linux USB gadget设备驱动解析(4)--编写一个gadget驱动作者:刘洪涛,华清远见嵌入式学院讲师。
一、编写计划通过前面几节的基础,本节计划编写一个简单的gadget驱动。
重在让大家快速了解gadget驱动结构。
上节中简单介绍了zero.c程序。
这个程序考虑到了多配置、高速传输、USB OTG等因素。
应该说写的比较清楚,是我们了解gadget驱动架构的一个非常好的途径。
但把这些东西都放在一起,对很多初学人员来说还是不能快速理解。
那就再把它简化一些,针对S3C2410平台,只实现一个配置、一个接口、一个端点,不考虑高速及OTG的情况。
只完成单向从host端接收数据的功能,但要把字符设备驱动结合在里面。
这需要有一个host端的驱动,来完成向device端发送数据。
关于在主机端编写一个简单的USB设备驱动程序,有很多的资料。
相信大家很快就会完成的。
二、功能展示1、PC端编写了一个usbtransfer.ko,能够向device端发送数据2、对目标平台编写一个gadget驱动,名称是g_zero.ko3、测试步骤在目标平台(基于S3C2410)上加载gadget驱动# insmod g_zero.koname=ep1-bulksmdk2410_udc: Pull-up enable# mknod /dev/usb_rcv c 251 0#在PC主机上加载驱动usbtransfer.ko#insmod usbtransfer.ko#mknod /dev/usbtransfer c 266 0连接设备,目标平台的终端显示:connected目标平台读取数据# cat /dev/usb_rcvPC端发送数据#echo “12345” > /dev/usbtransfer#echo “abcd” > /dev/usbtransfer设备端会显示收到的数据# cat /dev/usb_rcv12345abcd三、代码分析下面的代码是在原有的zero.c基础上做了精简、修改的。
一些结构的名称还是保留以前的,但含义有所变化。
如:loopback_config,不再表示loopback,而只是单向的接收数据。
/** zero.c -- Gadget Zero, for simple USB development* lht@* All rights reserved.*//* #define VERBOSE_DEBUG */#include <linux/kernel.h>#include <linux/utsname.h>#include <linux/device.h>#include <linux/usb/ch9.h>#include <linux/usb/gadget.h>#include "gadget_chips.h"#include <linux/slab.h>#include <linux/module.h>#include <linux/init.h>#include <linux/usb/input.h>#include <linux/cdev.h>#include <asm/uaccess.h>#include <linux/fs.h>#include <linux/poll.h>#include <linux/types.h> /* size_t */#include <linux/errno.h> /* error codes */#include <asm/system.h>#include <asm/io.h>#include <linux/sched.h>/*-------------------------------------------------------------------------*/ static const char shortname[] = "zero";static const char loopback[] = "loop input to output";static const char longname[] = "Gadget Zero";static const char source_sink[] = "source and sink data";#define STRING_MANUFACTURER 25#define STRING_PRODUCT 42#define STRING_SERIAL 101#define STRING_SOURCE_SINK 250#define STRING_LOOPBACK 251//#define DRIVER_VENDOR_NUM 0x0525 /* NetChip *///#define DRIVER_PRODUCT_NUM 0xa4a0 /* Linux-USB "Gadget Zero" */ #define DRIVER_VENDOR_NUM 0x5345 /* NetChip */#define DRIVER_PRODUCT_NUM 0x1234 /* Linux-USB "Gadget Zero" */ static int usb_zero_major = 251;/*-------------------------------------------------------------------------*/static const char *EP_OUT_NAME; /* sink *//*-------------------------------------------------------------------------*//* big enough to hold our biggest descriptor */#define USB_BUFSIZ 256struct zero_dev { //zero设备结构spinlock_t lock;struct usb_gadget *gadget;struct usb_request *req; /* for control responses */struct usb_ep *out_ep;struct cdev cdev;unsigned char data[128];unsigned int data_size;wait_queue_head_t bulkrq;};#define CONFIG_LOOPBACK 2static struct usb_device_descriptor device_desc = { //设备描述符.bLength = sizeof device_desc,.bDescriptorType = USB_DT_DEVICE,.bcdUSB = __constant_cpu_to_le16(0x0110),.bDeviceClass = USB_CLASS_VENDOR_SPEC,.idVendor = __constant_cpu_to_le16(DRIVER_VENDOR_NUM),.idProduct = __constant_cpu_to_le16(DRIVER_PRODUCT_NUM),.iManufacturer = STRING_MANUFACTURER,.iProduct = STRING_PRODUCT,.iSerialNumber = STRING_SERIAL,.bNumConfigurations = 1,};static struct usb_endpoint_descriptor fs_sink_desc = { //端点描述符.bLength = USB_DT_ENDPOINT_SIZE,.bDescriptorType = USB_DT_ENDPOINT,.bEndpointAddress = USB_DIR_OUT, //对主机端来说,输出.bmAttributes = USB_ENDPOINT_XFER_BULK,};static struct usb_config_descriptor loopback_config = { //配置描述符.bLength = sizeof loopback_config,.bDescriptorType = USB_DT_CONFIG,/* compute wTotalLength on the fly */.bNumInterfaces = 1,.bConfigurationValue = CONFIG_LOOPBACK,.iConfiguration = STRING_LOOPBACK,.bmAttributes = USB_CONFIG_ATT_ONE | USB_CONFIG_ATT_SELFPOWER, .bMaxPower = 1, /* self-powered */};static const struct usb_interface_descriptor loopback_intf = { //接口描述符.bLength = sizeof loopback_intf,.bDescriptorType = USB_DT_INTERFACE,.bNumEndpoints = 1,.bInterfaceClass = USB_CLASS_VENDOR_SPEC,.iInterface = STRING_LOOPBACK,};/* static strings, in UTF-8 */#define STRING_MANUFACTURER 25#define STRING_PRODUCT 42#define STRING_SERIAL 101#define STRING_SOURCE_SINK 250#define STRING_LOOPBACK 251static char manufacturer[50];/* default serial number takes at least two packets */static char serial[] = "0123456789.0123456789.0123456789"; static struct usb_string strings[] = { //字符串描述符{ STRING_MANUFACTURER, manufacturer, },{ STRING_PRODUCT, longname, },{ STRING_SERIAL, serial, },{ STRING_LOOPBACK, loopback, },{ STRING_SOURCE_SINK, source_sink, },{ } /* end of list */};static struct usb_gadget_strings stringtab = {.language = 0x0409, /* en-us */.strings = strings,};static const struct usb_descriptor_header *fs_loopback_function[] = { (struct usb_descriptor_header *) &loopback_intf,(struct usb_descriptor_header *) &fs_sink_desc,NULL,};static intusb_zero_open (struct inode *inode, struct file *file) //打开设备{struct zero_dev *dev =container_of (inode->i_cdev, struct zero_dev, cdev);file->private_data = dev;init_waitqueue_head (&dev->bulkrq);return 0;}static intusb_zero_release (struct inode *inode, struct file *file) //关闭设备{return 0;}static void free_ep_req(struct usb_ep *ep, struct usb_request *req){kfree(req->buf);usb_ep_free_request(ep, req);}static struct usb_request *alloc_ep_req(struct usb_ep *ep, unsigned length)//分配请求 {struct usb_request *req;req = usb_ep_alloc_request(ep, GFP_ATOMIC);if (req) {req->length = length;req->buf = kmalloc(length, GFP_ATOMIC);if (!req->buf) {usb_ep_free_request(ep, req);req = NULL;}}return req;}static void source_sink_complete(struct usb_ep *ep, struct usb_request *req)//请求完成函数 {struct zero_dev *dev = ep->driver_data;int status = req->status;switch (status) {case 0: /* normal completion */if (ep == dev->out_ep) {memcpy(dev->data, req->buf, req-> actual);//返回数据拷贝到req->buf 中, //dev->data_size=req->length; dev->data_size=req->actual; //实际长度为req-> actual;需要确认req –>short_not_ok为0。