第9章设备驱动程序开发实例
Windows设备驱动程序的开发
中图分 类号 :T 3 67 P 1.
文 献标 识 码 :A
引 言
wi o s n w 操作系统的正常工作依赖于大量的硬件设备 , d 这些硬件设备也许在主机中, 也许是所谓 的 外部设备 ,不管硬件设备的物理位置在什么地方 ,如果只是进行 电气连接 ,设备并不能工作 ,Wi o s n w d 操作系统依靠设备驱动程序 ( ei r e ) D v e i r 来实现对硬件设备的操作。Wi o s cD v n w 自身提供一些标准设 d 备的驱动程序 , 但硬件厂商众多 , 再加上大量的 自制硬件设备 , 必须对这些非标准的硬件编写设备驱动 程序 , n o s Wi w 才能识别这些设备 , d 并完成对这些设备 的控制。 在很大程度上驱动程序起到了原来 BO IS
了驱动 程序 的结 构 ,分析 了驱 动程 序在 W id w 操 作 系统 中的作 用和机 制 。研 究 了驱 动程 序与 其 它 内 no s
核 组件 、驱动 程序 与应 用程 序之 间的相 互关 系。通过 对 开发 工具 的介 绍 ,简述 了驱 动程 序 开发 的基 本 过 程 ,总结 了几种 驱动 程序 开发 工具 的优 缺点 。 关 键词 :Wid ws n o ;设备 驱 动程序 ;DDK 工具 包;V os 工 具 包 ;W iDr e 工具 包 To l D n ir v
收稿 日期 :20 .21 061—4
作者简介:蹇红梅 ( 90 ) 18.,女,四川南充人 ,助教 ,主要从事计算机应用技术方面的研 究。
维普资讯
1 2
四 川理 工 学院学报 (自然科 学版 )
20 0 7年 8月
驱动程序也可 向驱动程序发出请求。最后由驱动程序实现对硬件设备的访问。 I O管理器在调用驱动程序的例程时 ,将来 自 请求者的请求信息进行封装 ,以 I O请求包 (R )的 IP 数据结构发送给驱动程序 的例程。 驱动程序例程 接收 IP 并对 IP进行分析 、 R , R 处理 , 完成请求 所要求的工作。除以下所述的设备驱动程序外 , 操作 系统 的磁盘 文件 系统 、 内核线 程调度 、 拟 虚 内存管理 、 中断与 D A处理等工作都 由Wi o s M n w d 驱动程序完成。驱动程序还参与网络通信管理 、 U B接口、打印机管理 、显示管理等工作 。 S
C语言设备驱动编程入门

C语言设备驱动编程入门C语言设备驱动编程是一项常见的技术,用于编写操作系统的设备驱动程序。
设备驱动程序是操作系统与硬件设备之间的桥梁,它负责将用户操作转化为硬件设备能够理解和执行的指令。
本文将介绍C语言设备驱动编程的基本概念和入门知识,帮助读者了解并入门这一重要的编程技术。
一、设备驱动程序概述设备驱动程序是操作系统的一部分,它与操作系统内核紧密结合,用于实现对硬件设备的控制和管理。
设备驱动程序通常由硬件设备制造商提供,或者由操作系统开发者开发。
它负责处理硬件设备与操作系统之间的通信,使得用户能够方便地操作硬件设备。
设备驱动程序可以分为字符设备驱动和块设备驱动两种类型。
字符设备驱动用于处理流式数据的设备,如键盘、鼠标等;块设备驱动用于处理以块为单位的数据的设备,如硬盘、U盘等。
不同类型的设备驱动程序在实现上有所不同,但都需要用C语言编写。
二、设备驱动程序的基本结构设备驱动程序的基本结构包括设备初始化、设备打开、设备关闭和设备读写等函数。
下面我们逐步介绍这些函数的作用和实现方法。
1. 设备初始化函数设备初始化函数负责对设备进行初始化,包括设备的寄存器配置、中断设置等。
在这个函数中,我们需要了解硬件设备的相关规格和特性,并根据需要进行适当的配置。
2. 设备打开函数设备打开函数在设备被用户程序打开时被调用,它负责向操作系统申请资源,并进行相应的设置,例如打开文件、分配内存等。
3. 设备关闭函数设备关闭函数在设备被用户程序关闭时被调用,它负责释放设备所占用的资源,如释放文件占用的内存、关闭文件等。
4. 设备读写函数设备读写函数是设备驱动程序的核心部分,它负责设备与用户程序之间的数据交换。
设备读函数用于从设备中读取数据,设备写函数用于向设备中写入数据。
三、设备驱动程序的编写步骤编写设备驱动程序需要经过以下几个步骤:1. 了解硬件设备在编写设备驱动程序之前,我们需要详细了解硬件设备的规格和特性,包括硬件寄存器的地址、中断向量等。
第九章 软件的安装与系统测试

9.1.1 用FDISK进行分区 五、查看分区信息:
30、选择4,回车,查看分区信息。
9.1.1 用FDISK进行分区
31、此时显示主DOS分区(C:盘)和扩展DOS分区的信息。 输入“Y”键,可查看逻辑驱动器的信息。
9.1.1 用FDISK进行分区
32、这就是各逻辑驱动器的信息,至此硬盘分区工作完成。然后 必须对主分区和各个逻辑驱动器要进行高级格式化,这样,硬盘才 能存储数据。
PartitionMagic(简称PM)是大家熟知的超级硬盘分 区工具,可以不破坏硬盘数据重新改变分区大小;支持 FAT16、FAT32和NTFS等系统格式并可互相转换;可以 隐藏现有分区;支持多操作系统多重启动。面对功能强大 的PM,不要以为它可将一切硬盘分区问题顺利搞定,平 时使用还应保持一分谨慎才行。
9.1.2 用DM (Disk Manager) 进行分区
10、首先输入的主分区的大小,然后输入其它分区的然 后输入其它分区的大小。这个工作是不断进行的,直到你硬盘 所有的容量都被r) 进行分区
11、完成分区数值的设定,会显示最后分区详细的结果。 此时你如果对分区不满意,还可以通过下面一些提示的按键进 行调整。例如“DEL”键删除分区,“N”键建立新的分区。
9.1.1 用FDISK进行分区
4、输入“Y”后,按回车键,进入Fdisk的主界面。
9.1.1 用FDISK进行分区
9.1.1 用FDISK进行分区 一、查看分区情况:
5、先看看硬盘原有的分区,请选择4 。
9.1.1 用FDISK进行分区
6、此硬盘中只有一个分区,返回继续操作按ESC键 。
9.1.1 用FDISK进行分区 二、删除DOS分区或逻辑DOS驱动器:
9.1.2 用DM (Disk Manager) 进行分区
Windows下设备驱动程序的开发方法

目录一、驱动开发环境的搭建 (1)1.1 关于DDK (1)1.2 关于驱动程序的编译 (1)1.3关于驱动程序的运行 (2)二、驱动程序的结构 (3)2.1 驱动程序的头文件 (3)2.2 驱动程序的入口点 (3)2.3 创建设备例程 (4)2.4 卸载驱动例程 (5)2.5 派遣例程 (6)三、编写驱动程序的基础知识 (6)3.1 内核模式下的字符串操作 (6)3.2 内核模式下各种开头函数的区别 (8)3.3 一个示例程序 (10)3.4 补充说明 (10)四、在驱动中使用链表 (10)4.1 内存的分配与释放 (10)4.2 使用LIST_ENTRY (12)4.3 使用自旋锁 (12)五、在驱动中读写文件 (15)5.1 使用OBJECT_ATTRIBUTES (15)5.2 创建、打开文件 (16)5.3 读写文件操作 (16)5.4 文件的其它相关操作 (18)六、在驱动中操作注册表 (18)6.1 创建、打开注册表 (19)6.2 读写注册表 (20)6.3 枚举注册表 (21)七、在驱动中获取系统时间 (21)7.1 获取启动毫秒数 (21)7.2 获取系统时间 (22)八、在驱动中创建内核线程 (23)8.1 创建内核线程 (23)8.2 关于线程同步 (24)九、初探IRP (25)9.1 IRP的概念 (25)9.2 IRP的处理 (26)9.3 IRP派遣例程示例 (27)十、驱动程序与应用层的通信 (29)10.1 使用WriteFile通信 (29)10.2 使用DeviceIoControl进行通信 (32)十二、驱动程序开发实例 (33)12.1 NT驱动程序 (33)12.2 WDM驱动程序 (35)十三、参考资料 (41)一、驱动开发环境的搭建1.1 关于DDK开发驱动程序必备的一个东西就是DDK(Device Development Kit,设备驱动开发包),它跟我们在ring3常听到的SDK差不多,只不过它们分别支持开发不同的程序而已。
数码管驱动程序实例
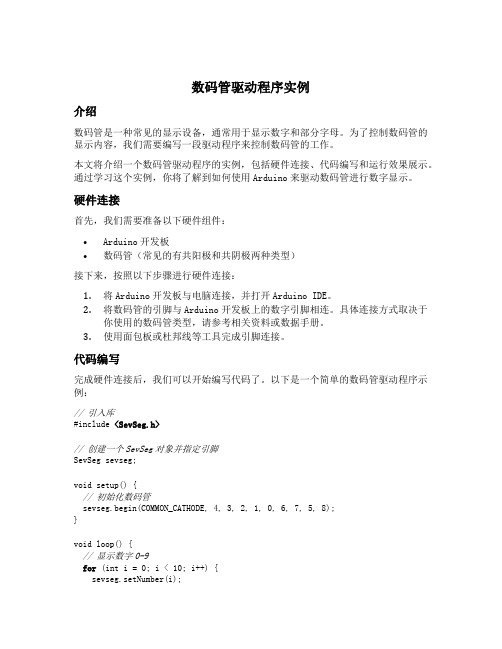
数码管驱动程序实例介绍数码管是一种常见的显示设备,通常用于显示数字和部分字母。
为了控制数码管的显示内容,我们需要编写一段驱动程序来控制数码管的工作。
本文将介绍一个数码管驱动程序的实例,包括硬件连接、代码编写和运行效果展示。
通过学习这个实例,你将了解到如何使用Arduino来驱动数码管进行数字显示。
硬件连接首先,我们需要准备以下硬件组件:•Arduino开发板•数码管(常见的有共阳极和共阴极两种类型)接下来,按照以下步骤进行硬件连接:1.将Arduino开发板与电脑连接,并打开Arduino IDE。
2.将数码管的引脚与Arduino开发板上的数字引脚相连。
具体连接方式取决于你使用的数码管类型,请参考相关资料或数据手册。
3.使用面包板或杜邦线等工具完成引脚连接。
代码编写完成硬件连接后,我们可以开始编写代码了。
以下是一个简单的数码管驱动程序示例:// 引入库#include <SevSeg.h>// 创建一个SevSeg对象并指定引脚SevSeg sevseg;void setup() {// 初始化数码管sevseg.begin(COMMON_CATHODE, 4, 3, 2, 1, 0, 6, 7, 5, 8);}void loop() {// 显示数字0-9for (int i = 0; i < 10; i++) {sevseg.setNumber(i);sevseg.refreshDisplay();delay(1000);}}代码解析:1.首先,我们引入了一个名为SevSeg的库,该库提供了控制数码管的函数和方法。
2.在setup()函数中,我们初始化了一个SevSeg对象,并指定了数码管的引脚连接方式。
这里使用的是共阳极数码管,如果你使用的是共阴极数码管,则需要将COMMON_CATHODE改为COMMON_ANODE。
3.在loop()函数中,我们通过一个循环来显示数字0-9。
kmdf 驱动开发实例

kmdf 驱动开发实例驱动开发是通过编写内核模块来与操作系统进行交互的一种技术。
而在Windows操作系统中,驱动开发的一种常见框架是Kernel-Mode Driver Framework(KMDf)。
本篇文章将以KMDf驱动开发实例为主题,逐步解释该实例的步骤和过程。
第一步:准备环境和工具在进行KMDf驱动开发之前,首先需要准备好相应的环境和工具。
这包括一台运行Windows的计算机、安装好Windows Driver Kit(WDK)和Visual Studio等开发工具。
第二步:创建驱动项目打开Visual Studio,选择新建项目(New Project),在模板(Templates)中找到"Kernel Mode Driver (KMDF)",然后填写项目名称和所需的目标Windows版本等信息。
这样就创建了一个KMDf驱动项目。
第三步:配置驱动项目在创建驱动项目后,需要对其进行配置。
这包括设置编译选项、指定目标平台、选择所需的驱动框架版本等。
配置完成后,可以开始编写驱动代码。
第四步:编写驱动代码在KMDf驱动项目中,主要的代码文件是驱动的入口点(DriverEntry),该函数在驱动加载时被调用。
在该函数中,可以进行一些初始化操作,如注册驱动、创建设备对象、为设备对象添加I/O回调函数等。
接下来,可以根据实际需求,编写其他的驱动逻辑代码。
例如,可以添加设备控制代码、I/O处理代码、定时器代码等。
这些代码将在驱动运行时被调用,以实现相应的功能。
第五步:编译和生成驱动在编写完驱动代码后,可以进行编译和生成驱动。
在Visual Studio中,选择生成解决方案(Build Solution),这将会将源代码编译成二进制文件。
生成的驱动文件会放置在指定的输出目录中。
第六步:安装和加载驱动生成驱动文件后,需要将其安装到操作系统中并加载。
在Windows中,可以使用DevCon等命令行工具来完成这一步骤。
linux设备驱动程序的设计与实现

linux设备驱动程序的设计与实现
Linux设备驱动程序的设计与实现是一个涉及底层系统编程和硬件交互的复杂过程。
下面是一个简单的步骤指南,以帮助你开始设计和实现Linux设备驱动程序:
1. 了解硬件:首先,你需要熟悉你要驱动的硬件设备的规格和特性。
这包括硬件的内存空间、I/O端口、中断请求等。
2. 选择驱动程序模型:Linux支持多种设备驱动程序模型,包括字符设备、块设备、网络设备等。
根据你的硬件设备和需求,选择合适的驱动程序模型。
3. 编写Makefile:Makefile是一个文本文件,用于描述如何编译和链接你的设备驱动程序。
它告诉Linux内核构建系统如何找到并编译你的代码。
4. 编写设备驱动程序:在Linux内核源代码树中创建一个新的驱动程序模块,并编写相应的C代码。
这包括设备注册、初始化和卸载函数,以及支持读写和配置硬件的函数。
5. 测试和调试:编译你的设备驱动程序,并将其加载到运行中的Linux内核中。
使用各种测试工具和方法来验证驱动程序的正确性和稳定性。
6. 文档和发布:编写清晰的文档,描述你的设备驱动程序的用途、用法和已知问题。
发布你的代码以供其他人使
用和改进。
ARM Cortex-A9多核嵌入式系统开发教程(杨福刚)章 (3)

#define ulong unsigned long
void pwm_stop(void);
void timer_request(void);
void irq_handler(void);
void timer_init(ulong utimer,ulong uprescaler,ulong udivider,ulong utcntb,ulong utcmpb);
1/1
1/2
8 位预
1/4
分频器 1
1/8
1/16
TCMPB3 TCNTB3
6:1
MUX
控制逻辑
3
TCMPB4
XpwmTOUT3
6:1
MUX
控制逻辑
4
No pin
图9.1 Exynos 4412 PWM定时器的工作原理
第9章 PWM定时器和WatchDog定时器
PWM定时器工作的具体过程: ● 当时钟被使能后,定时器计数缓冲寄存器(TCNTBn)把计 数初始值下载到递减计数器(TCNTn)中,定时器比较缓冲寄 存器(TCMPBn)把其初始值下载到比较寄存器(TCMPn)中。 ●递减计数器从TCNTBn得到初值以后,按其时钟频率进行 递减计数。当其值达到0时,产生定时器中断请求并通知 CPU该次计时完成。 ● TCMPBn的值用于脉冲宽度调制。当定时器的递减计数 器的值和比较寄存器的值相等时,PWM输出将改变输出电 平的状态。
第9章 PWM定时器和WatchDog定时器
图9.4 Exynos 4412处理器的看门狗模块
第9章 PWM定时器和WatchDog定时器
看门狗定时器计数值的计算公式如下:
(1) 输入到计数器的时钟周期 t_WatchDog = 1/( PCLK / (预分频值 + 1) / 分频值) 其中:预分频器(Prescaler,取值范围为0~254)及分频
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9.2 步进电机驱动器设计
9.2.2 嵌入式系统控制步进电机
9.2.3
步进电机驱动程序设计
• 1、头文件 • 设计键盘驱动程序,要使用Linux系统头文 件,其顶部位于 /*ARM_Linux。
2、设备初始化
• 定义初始化函数BJDJ_init( ),在该函数中 实现向系统注册设备号、设备名称和初始 化寄存器。 • (1)向系统注册设备 • ret = devfs_register_chrdev(BJDJ_MAJOR, "BJDJ", &bjdj_ops);
【例9-1】写一个6×4按键的键盘 驱动程序。
• 源程序见教材
9.1.4 键盘用户应用程序设计
• 1、键盘用户应用程序设计分析 • (1)获取设备驱动程序的文件描述符 • (2)调用设备驱动程序中的read( )方法, 读取检测到的按键数据值 • (3)在用户应用程序中还用到一个函数 usleep( ),usleep()函数的作用是:休眠 若干微秒,延迟执行的时间,起到去除抖 动的作用。
• (3)outb( )函数 • 函数outb(<数值>,<端口地址>)的作用 是向端口发送数值。
3、设备初始化
• 定义设备驱动程序的初始化函数 KEYBOARD_CTL_init( ),在该函数中实 现向系统注册设备号、设备名称和初始化 寄存器。 • (1)向系统注册设备 • (2)初始化寄存器 • (3)初始化函数KEYBOARD_init( ) • 4、驱动程序的file-operation数据结构 • 5、键盘扫描的接口函数
教材:嵌入式系统设计与应用 作者:张思民 出版:清华大学出版社
第9章 设备驱动程序开发实例
本章要点
• • • • • 1、键盘驱动程序的设计 2、步进电机驱动程序的设计 3、直流电机驱动程序的设计 4、GPIO设备驱动程序设计 5、网络接口设备驱动程序的设计
9.1 键盘驱动程序的设计
9.1.1 键盘原理介绍
(2)初始化通用I/O端口GPIO
• 对通用I/O端口GPIO的GPDR和GAFR寄存器设 置初值 : • GPSR为置位寄存器,当1时,电机开始旋转。 • GPCR为复位寄存器,当1时,电机停止转动。 • GPDR为方向寄存器, 1为输出,0为输入。 • GAFR为第二功能寄存器,
3、定义设备数据结构
2、处理设备I/O端口的数据的几个 重要函数
• (1)ioremap( )函数 • 函数ioremap( )的作用是把一个物理内存地 址点映射为一个内核指针,实现从物理地 址到内核空间虚拟地址的映射。
• (2)inb( )函数 • 函数inb(<端口地址>)作用是从端口读取 一个字节,这个函数的返回值就是从这个 端口读取到的数据。
(3)为控制电机旋转,对数组赋值
switch(bit[0]) { case 1: /*将GPSR1的第20位设置为1*/ GPSR1 |= (0x1 << 20); break; case 0: /*将GPCR1的第20位设置为1*/ GPCR1 |= (0x1 << 20); break; default: return 0; }
(2)控制转动角度和方向
• 由用户应用程序发送1组cmd指令:0x07、 0x0b、0x0d、0x0e,数组 bit[ ]得到4组不 同的数值,从而控制步进电机转动角度和 方向。
• 若要正转:GPSR为置位寄存器,当1时, 步进电机开始旋转。 • 若要停止:GPCR为复位寄存器,当1时, 步进电机停止转动。
表9.1 各按键的地址分布排列
列 地 址 0xfe 0xfe 行 地 址 0xfd 0xfb Oxf7 0xef 0xdf Enter + 0xfd * 8 6 3 · / 9 5 2 0 Num 7 4 1 0xfb Oxf7
1、头文件
• • • • • • • • • • #include <linux/config.h> #include <linux/kernel.h> #include <linux/sched.h> #include <linux/timer.h> #include <linux/init.h> #include <linux/module.h> #include <asm/hardware.h> #include <asm/io.h> #include <linux/delay.h> #include <linux/fs.h>
• 1、按键原理
点触按键产生抖动 键盘电路
2.矩阵键盘原理
9.1.2 键盘驱动程序设计思路分析
• 下面以一个6×4按键的键盘为例来讲述键盘 驱动程序的设计方法。 • 该键盘有四列,其地址分别为:0xfe、0xfd、 0xfb、Oxf7。该键盘的六行地址分别为: 0xfe、0xfd、0xfb、Oxf7、0xef、0xdf。各 行按键的地址分布排列如表9.1所示:
• 由于本驱动程序只需对设备I/O端口进行控 制处理,故在设备驱动的数据结构中仅定义了 一个ioctl( )接口函数:
static struct file_operations bjdj_ops = { ioctl: bjdj_ioctl, };
4、对电机设备控制的ioctl( ) 函数
• (1)定义数组bit[] ,接收来自用户应用程序的 指令。 • bit[0] = (cmd & 0x01) >> 0; • bit[1] = (cmd & 0x02) >> 1; • bit[2] = (cmd & 0x04) >> 2; • bit[3] = (cmd & 0x08) >> 3; • bit[4] = (cmd & 0x10) >> 4; • bit[5] = (cmd & 0x20) >> 5; • bit[6] = (cmd & 0x40) >> 6; • bit[7] = (cmd & 0x80) >> 7;
9.2.4
步进电机用户应用程序设计
打开设备文件获取文件描述符 fd=open("/dev/BJDJ",O_RDWR); 然后,通过选择“1”、“2”及其他数值来 控制电机旋转状况。