自动控制原理期末习题
兰州理工大学自动控制原理期末试题06b

compensator should be introduced to the system, and give a qualitative analysis .
Determine the values of K for the system’s steady state error ess < 0.1 .
r(t)
T=0.25s
Gh(s)
G0(s)
c(t)
Fig.3
解:
1 − e −τs Ke −0.5 s e -0.5s −1 G ( z ) = Z [G h ( s )G 0 ( s)] = Z [ × ] = K (1 − z ) Z [ 2 ] s s s z − 1 − 2 Tz 0.25K =K ×z [ ]= 2 z (z − 1) ( z − 1) z 2
δ % 反比 ζ , γ
正比 ζ 。
二、计算、分析、设计题(85 分)
1. (共 10 分)图 1 为谷物湿度控制系统示意图。在谷物磨粉的生产过程 中,有一种出粉最多的湿度,因此磨粉之前要给谷物加水以得到给定的湿 度。图中,谷物用传送装置按一定流量通过加水点,加水量由自动阀门控
制。加水过程中,谷物流量、加水前谷物湿度以及水压都是对谷物湿度控 制的扰动作用。为了提高控制精度,系统中采用了谷物湿度的顺馈控制。 1) 画出系统的控制结构方框图,并说明为了保持谷物湿度期望值, 系统是如何工作的?(5 分) 2) 系统的被控对象和控制装置各是什么?(5 分)
⎧ K ∗ = 48.1 2)以上计算可知 ⎨ d ⎩ K d = 0.96
兰州理工大学自动控制原理期末试题08a

Fig.3
C ( s)
解:开环传递函数
3.引入零阶保持器,使系统多了一个负相角,使系统稳定性变差。(2 分)
7.(12 分) A nonlinear system is shown in Fig 6, where N(X ) = X +6 ( X > 0) X +2
, G ( s) =
K s ( s + 1) 2
(1)When the nonlinear system cause self-sustained oscillation, try to determine the range of K ; (2)Please evaluate the amplitude and frequency value of the self-sustained oscillation.
— G1(s) G2(s) G3(s)
C(s)
Fig.2 解:当 N(s)=0,R(s) ≠ 0 时, 则
C ( s ) G1 ( s )G2 ( s ) + G3 ( s ) = R( s) 1 + G2 ( s )G3 ( s ) −G2 ( s )G3 ( s ) C ( s) = N ( s ) 1 + G2 ( s )G3 ( s )
振荡响应的点应为过原点作阻尼线与根轨迹相切的点 S1 。 (基地班 2 分)
此时: sin ϕ = 1.73 / 3 = 0.577 , ζ = cos ϕ = 0.817 , S1 到原点的距离即为 ωn 。 (基地班 2 分)
自动控制原理期末考试复习题及答案

填空题1、线性定常连续控制系统按其输入量的变化规律特性可分为_恒值控制_系统、随动系统和_程序控制_系统。
2、传递函数为[12(s+10)] / {(s+2)[(s/3)+1](s+30)} 的系统的零点为_-10_,极点为_-2_ _,增益为_________ 2__________ 。
3、构成方框图的四种基本符号是:信号线、比较点、传递环节的方框和引出点。
4、我们将一对靠得很近的闭环零、极点称为偶极子。
5、自动控制系统的基本控制方式有反馈控制方式、_开环控制方式和_复合控制方式_。
6、已知一系统单位脉冲响应为g (t) 6 e 1.5t,则该系统的传递函数为6/ <s+L5>7、自动控制系统包含_被控对象_和自动控制装置两大部分。
8、线性系统数学模型的其中五种形式是微分方程、传递函数、—差分方程_、脉冲传递函数_、__方框图和信号流图_。
9 、—相角条件—是确定平面上根轨迹的充分必要条件,而用—幅值条件—确定根轨迹上各点的根轨迹增益k*的值。
当n-m>_2_时,开环n个极点之和等于闭环n个极点之和。
1.25t10、已知一系统单位脉冲响应为g(t) 3e ,则系统的传递函数为_3/(S+L25)-11 、当时比例微分环节的相位是: A.90A. 90B. 90C. 45D. 4512 、对自动控制的性能要求可归纳为_稳定性__、_快速性_和准确性三个方面,在阶跃响应性能指标中,调节时间体现的是这三个方面中的_快速性―,而稳态误差体现的是_稳定性和准确性_。
13、当且仅当离散特征方程的全部特征根均分布在Z平面上的单位圆内,即所有特征根的模均小于—1 ___________ ,相应的线性定常离散系统才是稳定的。
14、下列系统中属于开环控制系统的是 D.普通数控加工系统A.电炉箱恒温控制系统B. 雷达跟踪系统C.水位控制系统D. 普通数控加工系统15、某单位负反馈系统在单位阶跃信号作用下的系统稳态误差e ss 0,则:一B.意味着该系统的输出信号的稳态值为 1 _A.意味着该系统是一个0型系统B.意味着该系统的输出信号的稳态值为 1C.意味着该系统没有输出信号D.意味着该系统具有比较高的开环增益16、一阶系统G(S)1 Ts 1在单位斜坡信号作用下,系统的稳态误差为T 。
期末考试试题集-自动控制原理(含完整答案)
自动控制原理1一、单项选择题(每小题 1 分,共20 分)系统和输入已知,求输出并对动态特性进行研究,称为1. ()2. 惯性环节和积分环节的频率特性在()上相等3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为()A. 比较元件B.给定元件C. 反馈元件D. 放大元件ω从0 变化到+ ∞时,延迟环节频率特性极坐标图为4. ()当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个()A. 比例环节B. 微分环节C. 积分环节D. 惯性环节10,则它的开环增益为(s(5s 2)期末考试- 复习重点7. A.1二阶系统的传递函数临界阻尼系若保持二阶系统B.2C.5D.10G ( s)2 sA. 提高上升时间和峰值时2s 5,则该系统是(过阻尼系 D. 零阻尼系减少上升时间和峰值时A. 系统综合B. 系统辨识C. 系统分析D. 系统设计A. 幅频特性的斜率 B. 最小幅值 C. 相位变化率 D. 穿越频率A. 圆B. 半圆 C. 椭圆 D. 双曲线5.6. 若系统的开环传递函数为C. 提高上升时间和调整时间1 T s ,当频率D. 减少上升时间和超调量1时,则相频特性G ( j )为()T9.(s)阶微分环节GA.45B. -45C.90D. -9010. 最小相位系统的开环增益越大,其(A. 振荡次数越多B. 大 稳定裕量越C. 相位变化越小D. 小 稳态误差越11. 设系统的特征方程为D s s 4D s s 8s 3 17s 20 ,则此系统16 s 5 (A. 稳定B. 临界稳定C. 不稳定D. 稳定性不确定。
12. 某单位反馈系统的开环传递函数为:k)时,闭环系统临界稳 ,当 k= ( 定。
s( s 1)( s 5)A.10B.20C.30D.4013. 设系统的特征方程为3s43210s 5s s2 0 ,则此系统中包含正实部特征的个数有(A.0B.1C.2D.314. 单位反馈系统开环传递函 数为A.2B.0.2G s s C.0.5,当输入为单位阶跃时,则其位置误差为(sD.0.0515. 若已知某串联校正装置的传递函数为G c (s)A. 反馈校正B. 正s 1 ,则它是一种( 10s 1相位超前校 C. 相位滞后—超前校正D. 正 相位滞后校16. 稳态误差 ess 与误差信号 E( s) 的函数关系为()A. e ss lim E(s) s 0 C. e ss lim E(s) s limB. e ss sE(s)s 0 lim D. e sssE(s) 17. 在对控制系统稳态精度无明确要求时,为提高系统的稳定减小增益 超前校正 滞后校正 D. 滞后 - 超前18. 相位超前校正装置的奈氏曲线为(A. 圆B. 上半圆C. 下半圆D.45 °弧线K19. 开环传递函数为G(s)H( s)=3 s (s, 则实轴上的根轨迹为(C.(- ∞,A.(-3 ,∞ ) B.(0 ,∞ ) 3)20. 在直流电动机调速系统中,霍尔传感器是用作( A. 电压 B. 电流 C. 位移 D. 速度 二、填空题(每小题 1 分,共 10 分)21闭环控制系统又称 .为 系统。
自动控制原理期末复习题B卷及答案

一、填空题(每空1分,共20分)1、 对于自动控制系统的性能要求可以概括为三个方面,即:______________ 、 ____________和 ____________ ,其中最基本的要求是 _____________ 。
2、 线性系统的主要特点是具有 ___________ 性和齐次性。
3、 反馈控制又称偏差控制,其控制作用是通过 ___________ 与反馈量的差值进行的。
4、 一般将0.707时的二阶系统称为 ___________ 二阶系统。
5、 从0变化到+ 时,惯性环节的频率特性极坐标图在 _______________ 象限,形状为 ____________ 。
6闭环系统的根轨迹起始于开环传递函数的 _____________ ,终止于开环传递函数的 _______ 或无穷远。
7、 在经典控制理论中,可采用 ___________ 、根轨迹法或 ____________ 等方法判断线性控制系统稳定性。
8、 乃氏稳定判据是根据系统的 __________ 频率特性曲线判断闭环系统的 ____________ 。
9、 如果控制系统闭环特征方程的根都在 s 平面的 _________ 平面,则该系统稳定。
10、 PID 控制器的输入一输出关系的时域表达式是 _____________________________ ,其相应的传递函数为 ____________________________________________ 。
11、 采样系统中,分析与设计的一个重要数学工具是 ____________________ 。
12、 非线性系统的运动过程可能出现稳定、不稳定或 __________________ 种情况。
3、若两个系统的根轨迹相同,则有相同的:( )A 、闭环零点和极点B 、开环零点二、选择题(每题2 分,共 10 分)1、 设系统的传递函数为 G( S ) 25s 22、 A.- 2 1,则系统的阻尼比为( 5s 1- • 51 25 已知系统的开环传递函数为 50(2 s 1)(s 5),则该系统的开环增益为)。
自动控制原理期末试卷及答案
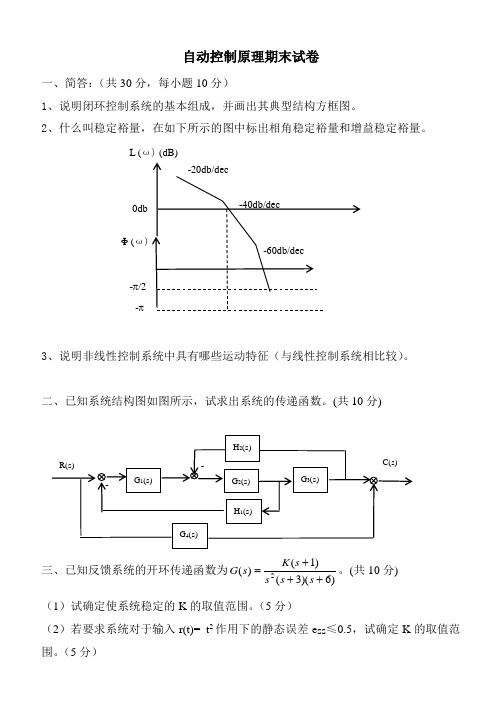
自动控制原理期末试卷一、简答:(共30分,每小题10分)1、说明闭环控制系统的基本组成,并画出其典型结构方框图。
2、什么叫稳定裕量,在如下所示的图中标出相角稳定裕量和增益稳定裕量。
3、说明非线性控制系统中具有哪些运动特征(与线性控制系统相比较)。
二、已知系统结构图如图所示,试求出系统的传递函数。
(共10分)三、已知反馈系统的开环传递函数为)6)(3()1()(2+++=s s s s K s G 。
(共10分) (1)试确定使系统稳定的K 的取值范围。
(5分)(2)若要求系统对于输入r(t)= t 2作用下的静态误差e SS ≤0.5,试确定K 的取值范围。
(5分)四、已知最小相位系统开环对数幅頻特性图如图所示,写出相应的传递函数。
(共10分)五、已知单位负反馈系统的开环传递函数为 )1)(1()(21++=s T s T s Ks G 。
(共10分)(1)试概略画出G (s )对应的Nyquist 图。
(5分) (2)由Nyquist 稳定判据给出闭环系统稳定的条件。
(5分) 六、已知系统的开环传递函数为)1()3(2)(+++=s s s s K s G )(绘制负反馈的根轨迹图,并确定使系统处于欠阻尼的K 值范围。
(共15分) 七、某采样控制系统的结构如图所示,已知τ=1,求: (1)求系统的脉冲传递函数。
(10分) (2)求系统稳定的K 值范围。
(5分)答案一、 简答:(共30分,每小题10分)1、答案:闭环控制系统的基本组成:检测元件、比较元件、放大元件、执行元件、给定元件、校正元件及被控对象。
(共6分,除被控对象外,每一个元件给1分)典型结构方框图(4分,可以没有局部反馈)2、答案:稳定裕量是系统距离稳定 的边界所具有的余量(5分)。
相角稳定裕量(3分)。
增益稳定裕量(2分)。
3、答案:与线性控制系统相比非线性控制系统表现出如下的特征: (1)非线性控制系统的运动不满足态的迭加原理。
期末《自控》试题及解答

浙江工业大学2010/2011(1)期终考试《自动控制原理》试题课程自动控制原理姓名班级学号第一部分简答题(共5题,每题3分,共15分。
答题必须简明扼要。
)1滞后—超前串联校正改善系统性能的原因。
(1)降低截止频率,(2)中频段提高相位裕度,(3)避免了单独采用超前校正或单独采用滞后校正的不足。
2惯性环节在什么条件下可以近似为比例环节。
在惯性时间常数很小的情况下。
3列举3种非线性系统与线性系统特性的不同之处。
(1)是否满足叠加原理(2)是否有可能产生自激振荡,(3)系统的特性(如稳定性)与初始状态是否有关。
4现实中,真实的系统都具有一定程度的非线性特性和时变特性,但是理论分析和设计经常采用线性时不变模型的原因。
(1)通常系统工作在平衡点附近的小范围内,(2)近似的精度通常满足工程要求,(3)线性系统的分析与设计方法成熟、方便。
(4)对于本质非线性,或者非线性明显的情况,或者要求比较高的情况,必须采用非线性的方法5零阶保持器传递函数1()TsheG ss--=中是否包含积分环节?为什么?不包含积分环节,因为s趋向0时,G(s)并不趋向无穷。
第二部分 填空题(共25分。
)6图示调节器的传递函数()/()o i U s U s 为 。
(图中运放器为理想运算放大器)(4分) 12111120010()(1)(1),,,()o i U s T s T s R KK T R C T R C U s T sR ++==-==其中C o第6题图7零初始条件下,某系统在单位脉冲()t δ作用下的响应为))(()(1211212T t eT T T t T T K t k ---=δ,该系统的输入输出间的传递函数为11)(12++=s T s T Ks G ,该系统输入输出间的微分方程为12()()(()())T y t y t K T u t u t +=+ 。
(每空3分)8 已知单位负反馈系统的开环传递函数为2(1)()()K s G s H s s+=,0,K >在单位阶跃1()t 、单位斜坡t 、单位加速度2t 作用下系统的稳态误差分别为 0 , 0 , 2/K 。
(完整word版)自动控制原理与系统期末试题及答案
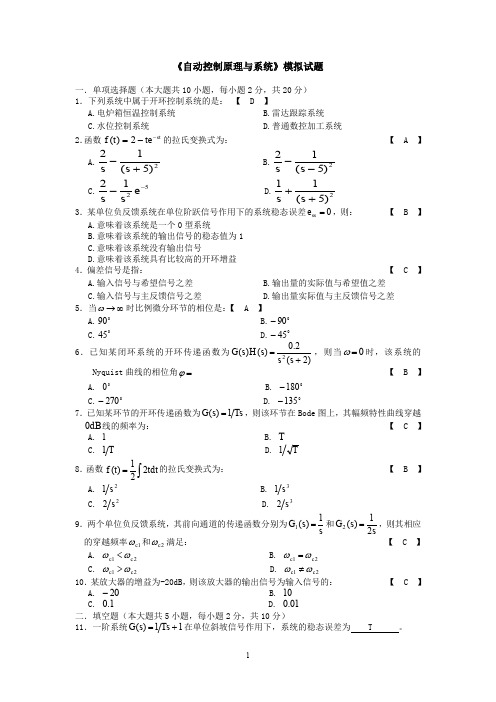
《自动控制原理与系统》模拟试题一.单项选择题(本大题共10小题,每小题2分,共20分) 1.下列系统中属于开环控制系统的是: 【 D 】A.电炉箱恒温控制系统B.雷达跟踪系统C.水位控制系统D.普通数控加工系统 2.函数stte t f --=2)(的拉氏变换式为: 【 A 】A.2)5(12+-s s B.2)5(12--s s C.5212--e ss D.2)5(11++s s3.某单位负反馈系统在单位阶跃信号作用下的系统稳态误差0=ss e ,则: 【 B 】A.意味着该系统是一个0型系统B.意味着该系统的输出信号的稳态值为1C.意味着该系统没有输出信号D.意味着该系统具有比较高的开环增益4.偏差信号是指: 【 C 】 A.输入信号与希望信号之差 B.输出量的实际值与希望值之差 C.输入信号与主反馈信号之差 D.输出量实际值与主反馈信号之差 5.当∞→ω时比例微分环节的相位是:【 A 】 A. 90 B. 90-C. 45D. 45-6.已知某闭环系统的开环传递函数为)2(2.0)()(2+=s s s H s G ,则当0=ω时,该系统的Nyquist 曲线的相位角=ϕ 【 B 】 A. 0 B. 180-C. 270-D. 135-7.已知某环节的开环传递函数为Ts s G 1)(=,则该环节在Bode 图上,其幅频特性曲线穿越dB 0线的频率为: 【 C 】A. 1B. TC. T 1D. T 18.函数⎰=tdt t f 221)(的拉氏变换式为:【 B 】 A. 21s B. 31sC. 22sD. 32s9.两个单位负反馈系统,其前向通道的传递函数分别为s s G 1)(1=和ss G 21)(2=,则其相应的穿越频率1c ω和2c ω满足: 【 C 】 A. 21c c ωω< B. 21c c ωω= C. 21c c ωω> D. 21c c ωω≠ 10.某放大器的增益为-20dB ,则该放大器的输出信号为输入信号的: 【 C 】 A. 20- B. 10 C. 1.0 D. 01.0 二.填空题(本大题共5小题,每小题2分,共10分)11.一阶系统11)(+=s G 在单位斜坡信号作用下,系统的稳态误差为 T 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测试题说明:所有的客观题都是以填空的形式给到大家,考试时的考核类型可能为填空、选择、判断等,考核内容和以下题目大致相似,大家好好复习! 考试题型为:选择(2分*10题=20分),填空(1分*25=25分),大题(55分) 选择填空大部分从以下题目中提炼总结,考核形式可能会有所改变,大题题型基本和下面题目的题型相似,但是题目会有所变化(比如传递函数更换、参数更换、要求做些调整等等) 禁止考试时抄小抄,一旦发现,试卷0分,请参加大补考! 没有交全作业或实验报告的同学、上课经常不到的同学平时成绩会比较低,因此要好好复习。 第一章测试题 1. 在水箱水温控制系统中,受控对象为 水箱 ,被控量为 水温 。 2. 自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环 控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环 控制系统。含有测速发电机的电动机速度控制系统,属于 闭环 控制系统。 3. 反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。 4. 自动控制系统可以分为定值控制系统、 随动 控制系统和程序控制系统。锅炉汽包水位控制系统属于 定值 控制系统,跟踪卫星的雷达天线控制系统属于 随动 控制系统。 5. 自动控制系统的基本要求是 稳定性 、 快速性或动态性能 、 准确性或稳态性能 。 第二章测试题 1. 传递函数是指在 零 初始条件下、线性定常控制系统的 输出拉氏变换 与 输入拉氏变换 之比。 2. 控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
3. 某系统的传递函数为)16)(13(18)(sssG,其极点是 s1=-1/3, s2=-1/6 。 4. 已知系统的开环传递函数为)5)(12(50ss,则该系统的开环增益为 10 ,根轨迹增益为 25 。 5. 已知负反馈系统的开环传递函数为221()56sGsss,则该系统的闭环特征
方程为 2(56)(21)0sss 。 6. 若某系统的单位脉冲响应为0.20.5()105ttgtee,则该系统的传递函数G(s)为 1050.20.5ssss 。 7. 一阶系统传递的标准形式是 1()1GsTs ,二阶系统传递函数的标准形
式是 222()2nnnGsss (或:221()21GsTsTs)。 8. 两个传递函数分别为G1(s)与G2(s)的环节,以并联方式连接,其等效传递函数为()Gs,则G(s)为 G1(s)+G2(s) (用G1(s)与G2(s) 表示)。 9. 两个传递函数分别为G1(s)与G2(s)的环节,以串联方式连接,其等效传递函数为()Gs,则G(s)为 G1(s)G2(s) (用G1(s)与G2(s) 表示)。
10. 以下系统的传递函数为 ()1()()GsGsHs 。
11. 求下图所示RLC电路的传递函数)()()(sUsUsGrc
画出等效s域电路图如下图所示
)(tucC
L
)(turR
G(s) H(s) RLsRLCsRsLRsCsCRRsCsCRtUtUrc211)()( 12. 求下图所示RLC电路的传递函数)()()(sUsUsGrc
画出等效s域电路图如下图所示 1111)()(2CRsCLsRsLsCsCsUsUrc
13. 求下图所示系统的传递函数。
)(sUcsC
1
sL
R)(sUr
)(sUcsC
1
)(sUr
RsL
sC1111RsC2121R)(sQr
)(0sQ
)(1sH)(0sQ)(2sH)(sQc
)(tucC
L
)(tur
R梅森公式为:nkkkPsG11)( 该框图中有三个回路,一对两两互不接触的回路 2221112221122211122211
1111111111sRCRCsRCsRCsRCsRCRCsRCsRCsRC
前向通路只有1条:2221111sRCRCP 11
111111111)(2111222221122211122211222111sRCsRCsRCsRCRCsRCRCsRCsRCsRCsRCRCPsGn
kkk
14. 某系统的动态结构图如下图所示,若初始条件为零,r(t)=n(t)=1(t),求输出c(t)及稳态误差ess。
由题意可知,1()()RsNss 22218()868()681rCssRsssss, 22
1()68()681nCss
s
Rsssss
22()()811()()()()()6868813/21/2(2)(4)24nrCsCss
CsRsNsRsNssssssssssssss
8 6s
1s 1
s
()Ns()Cs()Es()Rs12431()[()]1022ttctLCseet
2431()()()22ttetrtctee
lim()0tet
15. 某系统的动态结构图如下图所示。
(1)求传递函数()()CsRs和()()CsNs 根据梅森公式可得,
2231()6(21)231()261(21)CsssRsssss
223115()6()5()(21)21231()261(21)ccGsGssCssssNsssss
(2)若要求消除干扰对输出的影响,试求()cGs(1)
若消除干扰对输出的影响,则()0()CsNs,即 6()50cGss 求得5()6csGs 第三章测试题 1. 一个单位负反馈系统为I型系统,开环增益为K,则在r(t)=t输入下,此系
2 Gc(s) 3s
()Ns()Cs()Rs
1
21s
5 统的稳态误差是 K1 。 2. 一个单位负反馈系统为Ⅱ型系统,开环增益为K,则在r(t)=t输入下,此系统的(稳态误差是0 )。 3. 为了减小系统的稳态误差,可以采取 增加积分环节个数、增大开环增益、引入输入补偿、引入扰动补偿方法。 4. 闭环极点为212,1js的系统 (是/否)稳定。
5. 闭环特征方程为0122ss的系统 (是/否)稳定。 6. 闭环特征方程为0122ss的系统 (是/否)稳定。 7. 冲激响应为teth38)(的系统 (是/否)稳定。 8. 冲激响应为teth23)(的系统 (是/否)稳定。 9. 阶跃响应为)1(20)(3tetc的系统 (是/否)稳定。
10. 函数tetcos的拉氏变换是 22)(asas 。
11. 函数teatsin的拉氏变换是 22)(as 。 12. 若闭环极点全部位于S左半平面,则系统一定稳定,稳定性与闭环零点位置无关。此句话(是/否)正确。 13. 若闭环系统无零点,且闭环极点均为负实数极点,则时间响应一定是衰减振荡的。此句话(是/否)正确。否,一阶系统不振荡 14. 如果系统有开环极点处于S右半平面,则系统不稳定。此句话(是/否)正确。否,要看闭环极点位置 15. 超调量仅取决于闭环复数主导极点的衰减率,与其它零极点位置无关。此句话(是/否)正确。否,超调量主要取决于闭环复数主导极点的衰减率,并与其它闭环零、极点接近坐标原点的程度有关。 16. 稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定 。 17. 判断一个闭环线性控制系统是否稳定,在时域分析中采用 劳斯判据 ;在频域分析中采用 奈奎斯特判据 。 18. 典型二阶系统极点分布如右图所示,则无阻尼自然
频率n 5 rad/s,阻尼比 52 ,该系统
的特征方程为 0542ss(或者:0)2)(2(jsjs) ,该系统是否稳定?是 (是/否)。 19. 线性连续控制系统稳定的条件是所有特征根均位于S平面的 左 半部。 20. 系统动态性能指标中的 调节时间(或者st) 表示系统过渡过程的持续时间,从总体上反映系统的快速性, 超调量 反映系统响应过程的平稳性。 21. 已知系统的动态结构如下图所示,如果系统的开环增益可调,试确定在保证系统稳定的条件下,K的取值范围。
系统的闭环传递函数为 KssKKssKsG2)2()(2 闭环系统的特征方程为022Kss 劳斯表为
KssKs01221
要保证系统稳定,则劳斯表第一列元素均为正,则有K>0 由此可得K的取值范围为K>0 22. 已知系统的动态结构如下图所示,如果系统的开环增益可调,试确定在保证系统稳定的条件下,K的取值范围。
)(sR)(sC
)2(ssK
ImRe
1j
j2