pcl_examples
pcl 拟合圆柱方法
pcl 拟合圆柱方法一、PCL拟合圆柱的基本概念PCL(Point Cloud Library,点云库)是一个开源的点云处理库,广泛应用于三维扫描、计算机视觉和机器人领域。
拟合圆柱是一种基本的三维形状处理任务,通过对点云数据进行处理和分析,实现对圆柱特征的提取和建模。
二、拟合圆柱的数学模型在PCL中,拟合圆柱主要通过以下几个步骤完成:1.预处理:对输入的点云数据进行去噪、滤波等操作,提高拟合精度。
2.特征提取:从点云数据中提取圆柱的候选特征点,如顶点、边缘点等。
3.构建初始模型:根据特征点构建圆柱的初始模型,如参数化模型、柱面模型等。
4.优化模型:通过最小二乘法等方法,对初始模型进行优化,提高模型精度。
5.模型评估:评估优化后的模型质量,如拟合误差、表面光顺度等指标。
三、PCL实现拟合圆柱的算法步骤1.点云数据的输入:读取点云数据文件,如PLY、OBJ等格式。
2.点云预处理:去除噪声点、滤波等操作。
3.特征提取:采用边缘检测、角点检测等算法提取圆柱特征点。
4.构建初始模型:根据特征点构建圆柱的初始模型。
5.模型优化:采用最小二乘法等方法,优化圆柱模型。
6.模型评估:计算模型拟合误差,判断模型质量。
7.输出结果:将优化后的圆柱模型输出,如STL、OBJ等格式。
四、拟合圆柱应用案例及场景1.工业检测:通过PCL拟合圆柱算法,检测产品形状是否符合设计要求。
2.机器人导航:利用拟合圆柱模型,规划机器人运动路径。
3.虚拟现实:在虚拟场景中,实现真实感强烈的圆柱物体渲染。
4.医学影像:对医学影像数据进行拟合圆柱处理,辅助医生诊断和手术规划。
五、总结与展望PCL拟合圆柱算法在许多领域具有广泛的应用价值。
随着点云数据的快速增长和处理技术的不断发展,未来拟合圆柱算法将更加高效、精确。
PCL常用命令(富士通cluster)
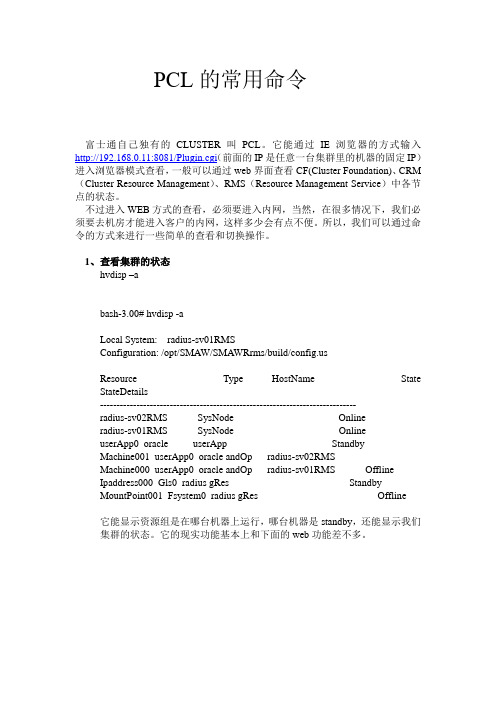
PCL的常用命令富士通自己独有的CLUSTER叫PCL。
它能通过IE浏览器的方式输入http://192.168.0.11:8081/Plugin.cgi(前面的IP是任意一台集群里的机器的固定IP)进入浏览器模式查看,一般可以通过web界面查看CF(Cluster Foundation)、CRM (Cluster Resource Management)、RMS(Resource Management Service)中各节点的状态。
不过进入WEB方式的查看,必须要进入内网,当然,在很多情况下,我们必须要去机房才能进入客户的内网,这样多少会有点不便。
所以,我们可以通过命令的方式来进行一些简单的查看和切换操作。
1、查看集群的状态hvdisp –abash-3.00# hvdisp -aLocal System: radius-sv01RMSConfiguration: /opt/SMAW/SMAWRrms/build/Resource Type HostName State StateDetails-----------------------------------------------------------------------------radius-sv02RMS SysNode Onlineradius-sv01RMS SysNode OnlineuserApp0_oracle userApp StandbyMachine001_userApp0_oracle andOp radius-sv02RMSMachine000_userApp0_oracle andOp radius-sv01RMS OfflineIpaddress000_Gls0_radius gRes StandbyMountPoint001_Fsystem0_radius gRes Offline它能显示资源组是在哪台机器上运行,哪台机器是standby,还能显示我们集群的状态。
Patran二次开发工具PCL系列教程之9
PAT304 Course Notes – Release 9.5 Copyright 2001 MSC.Software Corporation
9-7
PATRAN 2.5 Results Files
There are three formats of PATRAN 2.5 results files that can be imported into MSC.Patran • • • Element Results File (.els) Nodal Results File (.nod) Displacement Results File (.dis)
PAT304 Course Notes – Release 9.5 Copyright 2001 MSC.Software Corporation
9-5
Results Retrieval
Main way to access results in PCL is with res_utl_extract_[type]_results res_utl_extract_nodal_results() requires an integer array of 5 values to define the desired results: • Loadcase ID – res_utl_get_loadcases() • Subcase ID – res_utl_get_subcases() • Primary Result Case ID – res_utl_get_result_ids() • Secondary Result Case ID – res_utl_get_result_ids() • Layer ID – res_utl_get_layers()
《点云库PCL学习教程》第7章 可视化
类PCLHistogramVisualizer实现对PCL中的直方图的可视化。 类PCLHistogrmVisualizer的关键函数说明:
void spinOnce(int time=1)
刷新屏幕显示一次,time为允许重新渲染一次的最大时 间ms数。
void spin()
调用内部渲染循环。
void setBackgroundColor(const double &r, const double &g, const double &b, int viewport=0)
CloudViewer(const std::string& window_name)
构建可视化点云窗口,窗口名为window_name。
~CloudViewer()
注销窗口相关资源。
void showCloud(const ColorCloud::ConstPtr& cloud, const std::string& cloudname=“cloud”)
功能同上,点云定义采用PointCloud2, field_name指定点 云中存储直方图的字段。
template<typename PointT> bool updateFeatureHistogram(const pcl::PointCloud<PointT>& cloud, int hsize, const std::string&id=“cloud”)
本章首先对常用的点云可视化概念进行介绍其次对pcl的可视化相关模块及类进行简单说明最后通过应用实例来展示如何对pcl中可视化模块进行灵活运本章各小节目录71可视化相关概念及算法简介72pcl中visualization模块及类介绍73应用实例解析71可视化相关概念及算法简介可视化方面相关概念比较常见此处不进行详细列72pcl中visualization模块及类介绍pcl中pclvisualization库提供了可视化相关的数据结构和组件其主要是为了可视化其他模块的算法处理后的结果可直观的反馈给用户
pcl的应用实例
pcl的应用实例pcl(点云库)的应用实例随着计算机视觉和机器学习的发展,点云处理成为一个重要的研究领域。
点云是由大量的点构成的三维空间数据,可以用于建模、识别、跟踪等多个应用。
点云库(Point Cloud Library,简称PCL)是一个开源的点云处理库,提供了一系列的算法和工具,方便用户对点云数据进行处理和分析。
下面将介绍几个pcl的应用实例。
1. 点云建模和三维重建点云建模是通过对采集到的点云数据进行处理,生成三维模型的过程。
利用pcl库提供的滤波、特征提取和配准等算法,可以将多个点云数据融合成一个完整的三维模型。
这对于建筑、地形、工业设备等领域的三维重建非常有用。
例如,可以利用激光雷达扫描车辆外部的点云数据,然后使用pcl库中的算法进行处理,生成车辆的三维模型,用于检测变形和损坏。
2. 点云配准和匹配点云配准是将多个点云数据对齐到同一个坐标系的过程。
在实际应用中,由于传感器误差和运动估计等原因,采集到的点云数据可能存在一定的偏移和旋转。
利用pcl库提供的配准算法,可以将这些点云数据进行配准,使得它们在同一个坐标系下对齐。
这对于目标识别、地图构建和定位导航等应用非常重要。
例如,在自动驾驶中,可以利用激光雷达采集到的点云数据对车辆周围的环境进行建模,并通过配准算法将这些点云数据对齐到车辆坐标系,实现环境感知和路径规划。
3. 点云滤波和去噪由于点云数据的采集过程受到多种因素的影响,例如传感器噪声、遮挡和运动模糊等,采集到的点云数据可能存在噪声和异常点。
利用pcl库提供的滤波和去噪算法,可以对这些点云数据进行处理,去除噪声和异常点,提高点云数据的质量。
这对于目标检测、场景分析和数据挖掘等应用非常重要。
例如,在机器人导航中,可以利用激光雷达采集到的点云数据进行障碍物检测和避障规划,通过滤波和去噪算法,去除噪声和异常点,提高导航的准确性和稳定性。
4. 点云分割和特征提取点云数据通常包含多个对象或部分,利用pcl库提供的分割和特征提取算法,可以将这些点云数据进行分割,提取出感兴趣的对象或部分。
基于PATRAN的PCL培训材料(英文版)
5 PCL Functions
5 PCL Functions
Program Structure
5 PCL Functions
Accessing PCL Functions
Once a text file has been created which defines the function, the file must be read into MSC.Patran so that it is accessible. There are two directives for achieving this:
Arrays (数组)
Variables:
STATIC INTEGER entries(100) REAL table(-1:6, 10, 2:41) GLOBAL LOGICAL flags(0:8192) STRING line[80](100), ch[1](10,5) INTEGER I(3,5)
2. PCL Variables and Constants
Data Types(数据类型) Widgets (控件型)
A widget variable is defined by prefixing the variable name with the keyword WIDGET and is used only for working with the user interface routines.
2. PCL Variables and Constants
Data Types(数据类型) Reals(实数型):
A real variable is defined by prefixing the variable name with the keyword REAL.
pcl拟合平面输出平面方程
pcl拟合平面输出平面方程要使用PCL拟合平面并输出平面方程,可以按照以下步骤进行:1. 导入所需的PCL库和相关头文件:```cpp#include <pcl/point_types.h>#include <pcl/io/pcd_io.h>#include <pcl/segmentation/sac_segmentation.h>```2. 加载点云数据:```cpppcl::PointCloud<pcl::PointXYZ>::Ptr cloud(newpcl::PointCloud<pcl::PointXYZ>);pcl::io::loadPCDFile<pcl::PointXYZ>("input.pcd", *cloud); ```这里假设点云数据存储在名为"input.pcd"的文件中。
3. 创建PCL中的平面模型对象:```cpppcl::SACSegmentation<pcl::PointXYZ> seg;pcl::ModelCoefficients::Ptr coefficients(newpcl::ModelCoefficients);pcl::PointIndices::Ptr inliers(new pcl::PointIndices);```4. 设置平面拟合的参数:```cppseg.setOptimizeCoefficients(true);seg.setModelType(pcl::SACMODEL_PLANE);seg.setMethodType(pcl::SAC_RANSAC);seg.setMaxIterations(1000);seg.setDistanceThreshold(0.01);```这里使用了RANSAC算法来拟合平面,最大迭代次数为1000,距离阈值为0.01。
pcl 点云平滑滤波算法
pcl 点云平滑滤波算法
PCL(点云库)是一个用于点云处理的开源库,提供了许多点云平滑滤波算法。
点云平滑滤波的目的是去除噪声并平滑点云数据,以便进行后续的特征提取、分割或重建等操作。
下面我将介绍几种常见的PCL点云平滑滤波算法:
1. StatisticalOutlierRemoval,这是一种基于统计学的离群点移除算法,它通过计算每个点周围邻域的统计特征(如平均距离和标准差)来识别和移除离群点。
2. MovingLeastSquares,这是一种基于最小二乘法的平滑滤波算法,它通过拟合局部曲面来对点云进行平滑处理,适用于曲面重建和光滑曲面拟合。
3. VoxelGrid,这是一种基于体素格的下采样方法,它通过将点云数据划分为体素格并计算每个体素格中的平均值来实现平滑滤波和降采样。
4. BilateralFilter,这是一种双边滤波算法,它考虑了空间距离和属性相似性两个因素,能够在保持边缘信息的同时进行平滑
滤波。
5. MLS(Moving Least Squares),这是一种基于最小二乘法的平滑滤波算法,它通过拟合局部曲面来对点云进行平滑处理,适用于曲面重建和光滑曲面拟合。
以上列举的几种算法都是PCL中常用的点云平滑滤波算法,它们可以根据具体应用场景和需求进行选择和调整。
需要根据具体的点云数据特点和处理目标来合理选择和使用这些算法,以达到最佳的平滑滤波效果。
希望这些信息能对你有所帮助。
pcl点云聚类方法
pcl点云聚类方法【实用版2篇】篇1 目录1.介绍 PCL 点云聚类方法2.PCL 点云聚类方法的算法原理3.PCL 点云聚类方法的具体步骤4.PCL 点云聚类方法的优缺点5.PCL 点云聚类方法的应用案例篇1正文PCL(Point Cloud Library)点云聚类方法是一种基于点云数据的聚类算法。
点云数据是由大量三维坐标点组成的数据集,它在计算机视觉、图形学、机器人学等领域有着广泛的应用。
通过对点云数据进行聚类分析,可以提取出点云数据中的重要特征,为后续的数据处理和分析提供有效的依据。
PCL 点云聚类方法基于 RANSAC(Random Sample Consensus)算法,通过随机抽样并计算点云数据中各点的共识度来完成聚类任务。
具体来说,PCL 点云聚类方法分为以下三个主要步骤:1.构建点云数据的 k-d 树结构。
k-d 树是一种基于轴向分割的数据结构,可以高效地搜索和处理点云数据。
通过构建 k-d 树,可以快速找到点云数据中的近邻点,为后续的聚类计算提供便利。
2.计算点云数据的共识度。
共识度是衡量点云数据中各点之间相似性的一个指标。
在 PCL 点云聚类方法中,通过随机抽样并计算点对之间的距离来估计共识度。
随机抽样的次数越多,估计的共识度越精确,但计算量也越大。
3.根据共识度进行聚类。
根据计算得到的共识度,可以将点云数据划分为不同的簇。
通常,可以根据预设的聚类数量,将共识度最高的点对划分为同一个簇。
在划分过程中,可以使用一些启发式方法,如基于图的聚类方法,以提高聚类的准确性和效率。
PCL 点云聚类方法具有以下优缺点:优点:1.聚类效果较好,能够较好地挖掘点云数据中的特征信息。
2.算法原理成熟,有广泛的应用基础。
3.支持多种聚类算法,可根据实际需求灵活选择。
缺点:1.计算量较大,对计算资源有一定要求。
2.对于大规模点云数据,聚类效率较低。
PCL 点云聚类方法在许多领域都有应用,例如:1.三维场景重建:通过对点云数据进行聚类分析,可以提取出点云数据中的重要特征,用于三维场景的重建和可视化。
聚己内酯的共混合举例
聚己内酯的共混合举例中文摘要:介绍了聚己内酯在材料改性方面在共混方向上的应用,主要介绍聚己内酯与天然高分子,与聚醚类,与聚乳酸,与聚醇类等的共混举例,介绍了混合后体系的主要性能。
英文摘要:the adhibition of the summarized PCL was introduced,the examples of PCL summarized with nature polymer,polyether,polylactide or polyalcohol were mainly introduced and the main performance of the summarized system.关键词:聚己内酯,共混,应用Key words:PCL,Summarized,adhibition聚己内酯(PCL)是一种以二元醇为引发剂,由己内酯开环聚合而得到的热塑性半结晶聚酯。
PCL熔点为59~64℃,玻璃化温度为-60℃,其结构重复单元上有5个非极性亚甲基和一个极性酯基,因而具有良好的柔韧性和加工性,而制品则具有形状记忆性[1]。
然而,PCL是一种疏水性材料,亲水性较差,聚己内酯与其它聚合物进行共混,可以改善它的性能,使之更符合特殊条件下的应用。
这里主要介绍种聚己内酯的体系。
1.PCL与天然高分子共混淀粉、木质素、纤维素、壳聚糖等天然高分子材料均可自然降解,而且资源丰富,价格低廉,可以作为PCL的改性原料,其中以淀粉的应用最为广泛。
1.1PCL与热塑性淀粉共混PCL是近年来国内外研究较多的一种热塑性聚酯,将其与淀粉复合可以明显改善淀粉基材料的耐水性和加工流动性等性能,而且可确保体系的完全可降解性[3]。
较早的研究是将淀粉和PCL直接共混,由于疏水性的PCL与亲水性的淀粉之间的界面结合力太弱,导致共混后淀粉在PCL中的分散性较差,共混材料的性能较差。
对PCL、淀粉进行改性或添加适量的相容剂以增加其界面相容性,可获得性能优异的淀粉/PCL复合材料。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
loadsbcs_create( "fillet_pressure", "Pressure", "Element Uniform", @
spool.ses
()
#
# Purpose
: This file will generate a PATRAN database
#
"spool.db" which consists of a free standing
#
aluminum spool, wound with a wire which results
asm_const_coord_3point( "1", "Coord 0", 2, "[-1 0 0]", "[-1 1 0]", @
"[1 0 0]", asm_create_cord_3po_created_ids )
#---------------------------------------------------------------------
done by following these steps.
#
1. Choose "MSC.Nastran" from "Preferences",
#
"Analysis..." pulldown menus on the menu bar.
#
2. Select "Analysis" switch and from the form
#
button. From the "OUTPUT2 Fomat" Option Menu
#
select option "Text". Press "OK".
#
4. Press "Apply" on "Analysis" window.
#
If MSC.Nastran is available this will create
$# Do you wish to trim the original curves?
$? YESFORALL 1000047
#---------------------------------------------------------------------
# Create spool surface using Create's Revolve method
ga_view_aa_set( 30., 60., 0. )
ga_display_lines_set( "general", 2 )
#---------------------------------------------------------------------
# Create the surfaces for the top half of the spool using
STRING asm_create_line_xyz_created_ids[VIRTUAL]
asm_const_line_xyz( "1", "<3 0 0>", "[0 0 0]", "Coord 0",
@
asm_create_line_xyz_created_ids )
asm_const_line_xyz( "2", "<0 4 0>", "[0 0 0]", "Coord 0",
STRING sgm_sweep_surface_r_created_ids[VIRTUAL]
sgm_const_surface_revolve( "1", "{[-1 0 0][-1 1 0]}", 360.,
@
0.,"Coord 0","Curve 1 3 2", sgm_sweep_surface_r_created_ids )
#
# Create a new database and set the preferences
uil_file_new.go("", "./spool.db")
$? YES 36000002
ga_viewport_size_set( "default_viewport", 3.5, 3.5, 1 ) ga_viewport_location_set( "default_viewport", 0.0, 5.0, 1 )
* +400 to +20 psi compressive pressure varying
#
over the top and bottom flanges
#
# Analysis & After running this session file, analysis can be
# Results:
#
and it will be added the selected subcases list box.
#
Enter OK. This will generate Subcase 1 (Default subcase)
#
3. Select the "Translation Parameters..."
# Mirror method
STRING sgm_transform_surf__created_ids[VIRTUAL]
sgm_transform_mirror( "4", "surface", "{[0 4 0][0 5 0]}",
@
0., TRUE, FALSE, "Surface 1:3 ", sgm_transform_surf__created_ids )
#---------------------------------------------------------------------
# Set the positive surface normal vectors
STRING sgm_edit_surface_r_reversed_ids[VIRTUAL]
#
in a compressive pressure on the spool's core
#
and flanges.
#
#
This file can be run by starting a session of
#
MSC.Patran, and running this session file
#
through the "File","Session","Play" pulldown
#---------------------------------------------------------------------
# Create a local cylindrical coordinate frame
STRING asm_create_cord_3po_created_ids[VIRTUAL]
@
asm_create_line_xyz_created_ids )
#---------------------------------------------------------------------
# Create a fillet between the flange and the core curves
#
and select "spool.op2". Press "Apply".
#
7. The results will be read, and a file
#
"spool.jbr" is created.
#---------------------------------------------------------------------
CHAPTER 1 Introduction
1.2 Supporting Files
The spool.ses file is a session file that is used by many of the examples in this book. To use this file, hold down the control key and the right mouse button, highlight the text and paste it into a text file named spool.ses. Start MSC.Patran and go to File/Session/Play to run the session file..
# Create a pressure field 400_20_psi_transition
fields_create( "400_20_psi_transition", "Spatial", 1, "Scalar",
@
"Real", "Coord 1", "", "Function", 1, "R", "", "",