自升式海上风机安装平台桩腿升降系统的设计分析
自升式海上风机安装平台桩腿升降系统设计
自升式海上风机安装平台桩腿升降系统设计作者:唐蔚平裘继承薛雷刚来源:《广东造船》2014年第05期摘要:本文主要介绍自升式平台桩腿升降系统形式,分析海上风机安装平台的特点,优先选择和设计一种适用风电安装平台使用的升降系统。
关键词:海上风机安装;自升式;升降系统中图分类号:TK89 文献标识码:A1 前言海上风电在上世纪90年代初率先从欧洲起步,我国的海上风电发展则相对较晚,直到2007年,我国海上风电示范项目才建成发电,随后发展速度也十分缓慢。
但随着海上风电上网电价的明确,特别是国家能源局最新规划的出台:到2020年,海上风电装机容量将达到 30 MW。
海上风电工程将迎来新的发展机遇,开展关键技术研究和开发显得非常必要和迫切。
2 自升式平台桩腿升降系统形式自升式平台桩腿升降系统,用于桩腿插入海底并支撑起平台离开海平面一定高度,进行各种作业。
其主要形式有液压顶升式和齿轮齿条式。
2.1 液压顶升式液压顶升式桩腿升降装置,由液压驱动系统提供动力,确保桩腿能够克服泥土、砂石等带来的阻力和升降平台自身的重力,将桩腿插入(拔离)海床以及升降整个平台。
平台桩腿在工作过程中需运行平稳,无卡死现象;插桩(拔桩)过程中,液压执行机构需满足一定节距的行程要求;系统设计为自锁式桩腿液压升降系统,在各种工作及非工作状态下,系统可实现自锁;通过操作计算机或中央控制台,完成平台的升降作业。
2.2 齿轮齿条式齿轮齿条式桩腿升降装置,由动力驱动系统、动力传递系统(主要包括齿轮齿条及相应的减速机构)和平台升降控制系统三大部分组成。
该系统是在平台适当位置的桩腿上设置一定数量的齿条,并对应在每根齿条上安装几个小齿轮,齿条及其对应的小齿轮数量根据所要求的举升能力和平台总体要求加以确定。
动力通过桩边马达驱动齿轮减速箱,然后传递给与齿条啮合的小齿轮,从而带动平台的升降。
齿轮齿条式升降系统的最大优点是具有升降速度快、操作简单和易对井位。
3 国外自升式平台桩腿升降系统简介3.1 英国“Resolution”安装船由英国五月花能源公司设计、我国山海关造船厂承建的“果敢”号安装船,是第一艘专为海上风电场基础施工及风力发电机安装而建造的海洋工程船。
自升式海上钻井平台液压升降系统解析

自升式海上钻井平台液压升降系统解析摘要:本文对海洋平台液压升降系统以往的情况,对液压举升系统的结构,工作过程,液压控制系统进行分析。
关键词:液压升降系统;分析介绍一.引言自升式海上钻井平台液压升降系统,由一组独立的海上钻井平台提高液压驱动系统,确保桩腿可以克服泥砂带来阻力和自身重力,将桩腿插入或拔出海床和升降平台。
根据升降平台、操作、自储存、预压等的重量计算出压力条件下的重量和重力,确定正常的起重能力,预提升系统容量的提高起升速度。
液压升降系统的设计平台应满足以下功能:确保系统有足够的力量去克服阻力和平台的重力,将桩体腿插入或拔出;在桩腿的工作过程,转动应平稳,无卡阻现象;插桩或桩过程,液压能满足一定的节距的要求;系统设计自锁液压升降系统,在各种工作和非工作状态时,该系统可以实现自锁,由计算机或控制台命令完成升降工作。
二.国内外自升式海上钻井平台现状随着陆地油气资源开采力度的日渐加大和油气储量的不断减少,占全球资源总量约34%的海洋石油资源已成为人们关注的焦点和新一轮油气勘探开发的热点。
海洋钻井平台作为海上油气勘探开发的重要装备之一,目前已在世界范围内受到了普遍关注。
受海洋作业恶劣环境的影响,海洋钻井平台技术发展在近十几年中发生了重大变化,人们已经不再满足于过去传统的平台装备技术和钻探方式,而是逐渐将目光从浅海移向深海、由浅油气层转向深油气层、由简单地质层转向复杂地质层等,从而使得海洋钻井平台装备也随之由过去比较单一的固定式、自升式等装备发展到技术先进、控制性好、钻探能力强、适应范围广的钻探船、半潜式平台等勘探开发装备上来,并已成为当前和今后一段时间内世界海洋油气勘探开发的必然趋势。
纵观世界海洋钻井平台的发展历史,自1887年世界上最早的海上石油勘探开发工作起源以来,直到50多年以后,也就是20世纪40年代末期,海上石油工程才开始有了新的起色并发生了较大变化。
当时世界范围内共有3个国家能够从事海上石油开发工作,所用的平台都是固定式平台,且结构和钻井方式均比较简单,平台适应水深的能力只有几十米。
自升式海上钻井平台升降系统技术特点分析

压 马达, 可使 升降 系统 针对 不 同 的载荷 采用 不 同 的 速度 ,这 样 节 省 了平 台 升降 的时 间 ;③采 用 大 扭
矩 、低转 速 的液 压马达 可减小 减速箱 的传动 比,从
而减小其 尺寸和 造价 。 从 操 作方式及 故障 率来看 ,两种驱 动升降方 式
均 需设置集 中控 制 台和 桩边 控制 台,集 中控制 台 内
2 齿 轮齿 条 升 降系统 的设 备 组 成
自升式平 台的桩腿齿 条是 沿桩腿 圆筒 或玄杆铺升 降系统传
动装 置 的末端 ,整 个升 降系统 的动力 由电动机或液
压马 达输 出 ,通过联 轴器传 输到传 动装置 ,再 由传 动装置 传递给 小齿轮 ,最后通 过小齿 轮驱动齿 条作
翔
T ur … o n
(7 t 0) 1
c
一 条棠 茎
B 8 00 0N・ 以上 。 目前 国 内缺 乏这 种 大速 比减 速 0 0 m
机 构 的设 计制 造 经验 ,对 于其受 力 分析 、动 力学研 究 、振 动噪声 控 制 、弹性 啮合 原理 以及 载荷 分配 等
每座平 台典型 的 电动齿 轮齿条 式升 降系统 的主
齿 轮齿条 升降 的方 式 比较 多 。所 谓齿轮 齿条式 升降
系统就是 在平 台的每根齿 条上设 置几个小 齿轮 ,齿 条及 其对应 小齿轮 数量根 据平 台所 要求 的举升能 力
和平 台总体要 求加 以确定 。动力通 过桩边 马达驱动
直 线运 动 ,从 而带动桩 腿或平 台进行 升降作业 。对
l 圈 梁 ; 2 平 台 主 甲板 ; 3 顶 升 油 缸 ;4 升 降 室 顶 饭 ; 一 — 一 -
于一个 三根绗 架式桩腿 的 自升 式平 台来说 ,每一个 桩 腿 上都有 三 根玄杆 ,每根 玄杆 上 设有 两道 齿 条 , 每 道齿 条上有 上下 两个小 齿轮 与之 啮合 ( 图 3 , 见 ) 每一 对 啮合 齿轮及 其驱 动 、传 动装置构 成一个升 降 单元 ,一般 来讲 ,升降 系统 由数 个或数 十个升 降单
自升式海上风电安装平台管路设计

自升式海上风电安装平台管路设计摘要:随着多年对陆上风电的开发,风电技术逐渐成熟。
与之相比,海上风电具有更多优势,但开发的难度也更大。
海上风电场通常由一定数量的海上风电机组构成。
本文就自升式海上风电安装平台管路设计进行研究分析。
关键词:自升式;海上风电安装平台;管路设计进入21世纪,全球经济发展对能源的需求越来越大,同时,随着人们生活水平提高,对环保的要求也越来越高。
风能是一种清洁可再生的,也是最成熟、最具备大规模商业开发价值的新型能源。
一、管路设计方法1.综合构思。
在生产设计初期,由资深的管路设计工程师,联合电气、舾装、船体等专业设计人员,对大通径管路走向(如通风管、排气管、海水总管等)、主干电缆布置、重要设备摆放进行综合构思,合理分配空间和确定安装工序,避免各区域、各专业人员各自为阵,减少推诿扯皮的现象发生,有利于减少后期的协调工作、提高设计效率。
然后,根据综合构思的结果,编制和完善设计方针书、设计指示书和管子原则工艺,明确说明各区域、各系统设计的要点和注意事项,作为指导设计人员管路设计的根本原则,避免走弯路,减少重复修改。
2.过程校审。
模型与图纸的校对贯穿整个设计过程,包括日常模型检查、阶段性成果评估和出图前模型评审等步骤,将问题消灭在早期。
校审内容涵盖原理性核查、船东船检退审意见落实、布置合理性及干涉检查等等,相关的校审内容形成记录,限期解决,闭环管理,具有可追溯性。
3.订货策略。
编制《造船物资订货和定额过程控制管理规定》,对管系材料订货的时机、裕度及方法做出明确说明,建立管系物资订货过程控制流程,便于跟踪和控制订货量和定额量。
通过执行该规定,管材预估订货准确率为93.85%,最终汇总订货准确率为98.47%;管子连接件预估订货为93.75%,最终汇总订货准确率为99.04%。
二、管路设计特点和注意事项与常规船舶设计相比,自升式海上风电安装平台的管路设计具有一些特殊性。
本文主要从轻量化管路设计、升降液压管路设计、桩腿桩靴管路设计、应力集中区域管路设计、排气管路设计、载货区域管路设计等方面进行阐述,分别介绍其特点和注意事项。
海上风电安装平台升降系统同步控制研究

海洋平台海上风电安装平台升降系统同步控制研究刘伟1,2,叶树林1,刘会涛2(1.佛山科学技术学院机电工程与自动化学院,广东佛山528000;2.广东精铟海洋工程股份有限公司,广东佛山528000)摘要:文章针对海上风电安装平台的升降系统在升/降过程中受到扰动后同步性能变差的问题,设计了基于幂次趋近律的滑模变结构控制方法,用来提高升降系统的同步性能和抗干扰能力。
文章采用滑模控制器设计转速环控制器,应用偏差耦合同步控制策略,对同步误差控制器作出改进。
利用Simulink 建立了4台异步电机的同步控制模型,分别验证了单电机的滑模控制和多电机的滑模同步控制的控制效果,并根据仿真图像分析,得出了以下结论,即对于单电机控制,滑模控制的效果较PI 控制器具有更高的鲁棒性;对于多电机同步控制,滑模同步误差控制器相较传统偏差耦合控制策略,同步精度高,且鲁棒性强。
关键词:升降系统;多电机同步控制;矢量控制;偏差耦合;滑模控制中图分类号:P75文献标志码:Adoi :10.13352/j.issn.1001-8328.2024.02.014Abstract :This paper designs a sliding mode variable structure control method based on the power reaching lawto improve the synchronization performance and anti-interference ability of the lifting system of the offshore windpower installation platform.The study adopts the sliding mode controller to design the speed loop controller and ap⁃plies the deviation coupling synchronous control strategy to improve the synchronous error controller.This paper es⁃tablishes the synchronous control model of four asynchronous motors via Simulink to verify the control effect of sliding mode control of a single motor and sliding mode synchronous control of multiple motors,respectively.The results of simulation image analysis demonstrate that the effect of sliding mode control is more robust than that of PI controller for single-motor control;for multi-motor synchronous control,the sliding mode synchronous error controller hashigher synchronization accuracy and stronger robustness than the traditional deviation coupling control strategy.Key words :lifting system;multi-motor synchronous control;vector control;deviation coupling;sliding modecontrol作者简介:刘伟(1999-),男,湖北荆门人,在读硕士研究生,研究方向为装备制造和电气传动。
自升式平台迁移过桥后桩腿拼装方案研究

自升式平台迁移过桥后桩腿拼装方案研究摘要:自升式平台是一种海上活动式钻井装备,目前是全球海洋石油勘探中使用最多的一种钻井平台,它由船体、桩腿、升降机构及一系列钻井设备所组成。
自升式平台迁移过程中,桩腿升至主甲板百米以上,在远程拖航时会通过一些跨海大桥,由于大桥距离海面净空限制,因此在拖航之前需要把桩腿进行分段截断,通过大桥后再把截下来的桩腿拼装上去,但是往往由于过桥后进入内海,当地浮吊起吊高度不够,不能把超过吊高限制的桩腿部分吊装至安装高度。
如何把上面几部分桩腿分段拼装上去以保证平台桩腿的正常使用,本文研究的方案巧妙地利用自升式平台自动升降的功能解决了这类工程难题,对于自升式平台迁移过桥的类似工程问题具有重要的借鉴意义。
关键词:自升式平台桩腿迁移过桥拼装Abstract:Jackup is a removable drilling equip which usually be used in ocean oil exploration and drilling. It consists of main hull、leg、jackcase and other drilling equipments. The leg will be jack up to more than hundred meters from main hull when rig being transport crossing some bridges, and it need to divide the leg to several sections due to the bridge headroom restriction,.after crossing the bridge we need to assemble them together. The problem is that after crossing the bridge there can not find a floating crane to lift the divided sections to the required height to assemble them together. So this paper want to consider an ingenious method to solve the problem like that,it’s can be taken as example when encounter the same engineering problems.Keywords: Jackup, Leg, Transport, Cross the bridge, Assemble.1. 背景介绍博斯普鲁斯海峡(StraitofBosporus)又称伊斯坦布尔海峡。
自升式海洋平台桩腿强度及稳定性分析(1)

σb/MPa
164.909 156.011 37.866 174.737 155.798 40.124 131.496 146.097 35.974
σ/MPa
201.819 199.141 38.165 212.840 200.227 40.423 165.475 183.047 36.273
第十四届中国海洋(岸)工程学术讨论会论文集
147
自升式海洋平台桩腿强度及稳定性分析
蒙占彬,田海庆,Biblioteka 敦秋(胜利石油管理局 钻井工艺研究院,山东 东营 257061) 摘要:以国内某自升式钻井平台为例,并对利用有限元分析软件 ANSYS 对自升式海洋平台桩腿强度及稳定性分析的方法 进行介绍,提出了一种考虑桩腿齿条等构件作用的改进计算方法。 关键词:桩腿;强度;稳定性分析
表 3 自存工况作用力(90°)
构件 厚度/mm 50 艏桩 45 36 50 左艉桩 45 36 50 右艉桩 45 36 弯矩 My( / kN· m) 弯矩 M z / (kN· m) 2 324 1 692 373 1 305 950 209 1 143 742 163 60 809 51 789 9 736 64 467 51 737 10 322 56 828 48 518 9 255 轴力 Fx /kN 22 305 23 975 137 23 026 24 697 137 20 653 20 534 137
150
第十四届中国海洋(岸)工程学术讨论会论文集
3.2.3 计算结果 将表 1、表 2 及表 3 的数据代入式(6)进行计算,得到桩腿不同壁厚最危险单元的计算轴向应力 σa、 计算弯曲应力 σb 及计算组合应力 σ,如表 4 所示。
自升式海洋平台桩腿升降缓冲分析
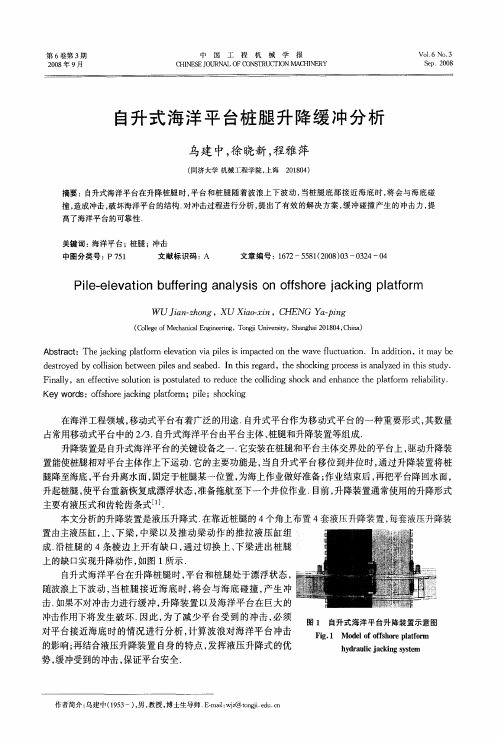
升起桩腿 , 使平台重新恢复成漂浮状态 , 准备拖航至下一个井位作业 . 目前 , 升降装置通常使用的升降形式 主要 有液压式和齿 轮齿条 式… .
本文分析的升降装置是液压升降式 . 在靠近桩腿的4 个角上布置 4 套液压升降装置 , 每套液压升降装 置由主液压缸, 、 上 下梁 , 中梁 以及推动梁动作的推拉液压缸组 成. 沿桩腿的 4条棱边上开有缺 口, 通过切换上 、 下梁进出桩腿 上的缺 口 实现升降动作 , 如图 1 所示. 自升 式海洋 平 台在升 降桩 腿 时 , 台和桩腿 处于漂 浮状态 , 平 随波浪上下波动 , 当桩腿接近海底时, 将会与海底碰撞 , 产生冲 击. 如果不对冲击力进行缓冲, 升降装置 以及海洋平台在巨大的 冲击作用下将发生破坏. 因此 , 了减少平 台受到的冲击, 为 必须 图 1 自升式海洋平台升降装置示意图 对平台接近海底时的情况进行 分析 , 计算波浪对海洋平 台冲击 F g 1 M o e fo fh r l to m i . d lo fs o e p a f r
第3 期
乌建 中, : 等 自升式海洋平台桩腿升降缓 冲分析
1 海 洋平 台升 降 过 程 运 动 分 析
漂浮于水面的物体在波浪作用下将产生 6 自由度的运动. 个 在船舶工程中, 已经把这些运动定名为纵 荡、 横荡 、 荡及横 摇 、 垂 纵摇 、 首摇 . 中 , 3个是 分别 沿坐标 轴方 向的平移 运动 , 3个是 绕船 的纵 轴 、 其 前 后 横
W U Ja —h n in z o g,XU Xiox n,C NG — i g a-i HE Yap n
( ol e f cai l nier g ogi ie i ,S a hi 0 8 4 C i ) C lg hnc gnei ,T n iUnvrt hn a2 10 ,hn e o Me aE n sy g a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
化工能源
化 工 设 计 通 讯
Chemical Energy
Chemical Engineering Design Communications
·196·
第44卷第6期
2018年6月
目前,环境问题已经成为了全球发展的重要课题,清洁能源开发以及使用,已经成为各国研究的重点。
风能作为清洁能源,不仅可再生,而且储量丰富,是重点开发对象。
海上可开发利用的风能较多,成为开发热点。
自升式海上风机安装平台,在开发中,发挥着重要作用,因此具有研究意义。
1 自升式海上风机安装平台发展前沿
从国内研发情况来说,已经朝向1 200t 自航自升式海上风电多功能安装平台迈进,“尚和1”的开工建设是重要标志。
从设计角度来说,实现1 200t 吊机整体安装以及最后一截约60m 桩腿的整体接长。
此平台配置了1 200t 绕桩吊;配置4 800t 连续型液压插销升降系统;3台1 800kW 全回转舵桨以及DP1,航速能够达到7节。
从发展情况来说,未来我国自升式海上风机安装平台整体设计水平将会不断提升,进而掌握更多的国际话语权。
2 自升式海上风机安装平台桩腿升降系统形式
2.1 液压顶升式
此类升降装置,主要是发挥液压驱动系统作用,提供一定的动力,使得桩腿可以有效克服泥土以及砂石等所带来的阻力、升降平台自身的重力,将桩腿拔离或者插入海床,实现平台整体升降。
在实际应用中,桩腿要保证运行平稳,没有卡死的情况。
在插桩或者拔桩环节,液压执行机构要能够达到节距的行程要求。
对于系统的设计,选择自锁式桩腿液压升降系统,无论是在工作状态下,还是非工作状态下,都能够实现自锁。
利用操作计算机或者中央控制台,实现平台升降。
2.2 齿轮式条式
此类升降装置的组成部分,具体包括动力驱动能够系统、动力传递系统、平台升降控制系统。
桩腿升降系统设计,通过在平台某个位置的桩腿上,布置一些齿条,并且对应在每根齿条上,布置一定数量的小齿轮。
依据举升能力以及自升式平台运行的具体要求,来确定齿条和相应的小齿轮数据。
在实际运行的过程中,利用桩边马达产生相应的动力,驱动齿轮减速箱。
接着,传递给小齿轮,带动着自升式平台的升降。
此系统应用,具有升降速度快和操作简易等优势[1]。
3 桩腿升降系统设计分析
3.1 案例概述
以1 000t 风电安装船为例,该平台主要用于海上风电设备的安装。
本平台带有四个圆柱形桩腿,桩腿总长79.7m 。
桩腿升降装置是液压插销式,系统升降速度是0.5m/min 。
桩腿升降系统设计参数如下:①波高6.5m ;②风速51.4m/s ;③表面潮流参数1.54m/s ;④桩腿插入深度在3~11m 范围内。
总举升起重量为14 000t ,在实际运行中,单腿升降能力达到3 500t ,可变荷载在3 000t 左右,整船共有4套升降系统。
3.2 桩腿设计
船舶处于站立状态时,桩腿支承船体,桩腿的性能如何,直接影响着风电安装船运行的安全性。
当桩腿处于正常工作状态时,受到船体传递的载荷和其自身的环境载荷,预压时,要选择无风无浪的状况下开展,桩腿受到安装船静载荷。
在插入或者拔出的工况下,其受到安装船体风浪流载荷、自身的环境荷载。
在拖航工况下,其主要受到风力以及惯性力等的作用。
在进行桩腿设计时,除了要进行外荷载计算以及有限元分析外,还需要做好不同工况下桩腿强度的分析,确保桩腿升降系统的安全性和合理性。
3.3 强度分析
在进行桩腿升降系统时,要做好强度分析,保证桩腿设计的合理性。
在具体分析的过程中,要从各类工况入手。
在正常作业工况下,进行桩腿强度分析,要选择最危险的工况,做好相应的校核。
也就是风浪流同向作用。
荷载具体如下:①船体风荷载;②风机系统风荷载;③重力荷载;④桩腿上的流载荷;⑤桩腿上的波浪载荷;⑥其他荷载。
对于风载荷以及波浪载荷、流载荷,都采取耦合力的形式施加,进行强度分析。
在预压工况下,因为预压施工作业要求,必须在气候条件较好的情况下开展。
因为此时的环境载荷比较小,因此环境载荷并非此工况下的主要载荷。
预压环节,使用平台自重,使得对角两根桩腿能够插入海床,此时桩腿主要是受船体、风机系统重力载荷。
在此工况下,平台排水量是主要荷载,平台单个桩腿负责承受50%平台重力。
通过强度分析,进行桩腿升降系统设计,保证设计的质量,进而保证安装平台能够有效使用。
4 结束语
综上所述,对于自升式海上风机安装平台桩腿升降系统的设计,为了保证平台稳定安全运行,要做好桩腿设计的把控,做好强度分析。
在设计的过程中,结合平台运行实际需求,来选择相关参数。
参考文献
[1] 唐蔚平,裘继承,薛雷刚.自升式海上风机安装平台桩腿升降系统设计[J].广东造船,2014,(5):65-67.
摘 要:针对自升式海上风机安装平台设计相关内容,以桩腿升降系统设计为重点,做了简单的论述。
首先,对自升式海上风机安装平台发展的最新突破,进行了论述。
其次,分析了桩腿升降系统形式。
最后,结合现有的桩腿升降系统,进行了设计分析。
关键词:自升式;海上;风机;安装平台;桩腿升降系统中图分类号:TH211.6 文献标志码:A 文章编号:1003–6490(2018)06–0196–01
Design Analysis of Lifting System for Legs of Self-elevating
Offshore Installation Platform
Luo Yong ,Zhang Jia-qi
Abstract :According to the design content of the jack-up offshore wind turbine installation platform design ,the design of the leg lift system is emphasized and a brief discussion is made.First of all ,the latest breakthroughs in the development of self-elevating offshore wind turbine installation platforms are discussed.Second ,it analyzes the form of leg lift system.Finally ,combined with the existing leg lift systems ,a design analysis was performed.
Key words :self-elevating ;offshore ;wind turbine ;installation platform ;leg lift system 自升式海上风机安装平台桩腿升降系统的设计分析
罗 勇1,张家齐2
(1.南通润邦海洋工程装备有限公司,江苏南通 226000;2.上海振华重工(集团)股份有限公司,上海 200000)
收稿日期:2018–04–10作者简介: 罗勇(1981—),男,湖南益阳人,工程师,主要研究方
向为船舶及平台动力系统优化、风电安装平台基础性研究与应用。