北京理工大学2014年自动化考研专业课真题
北京理工大学自动控制理论04-07真题解析
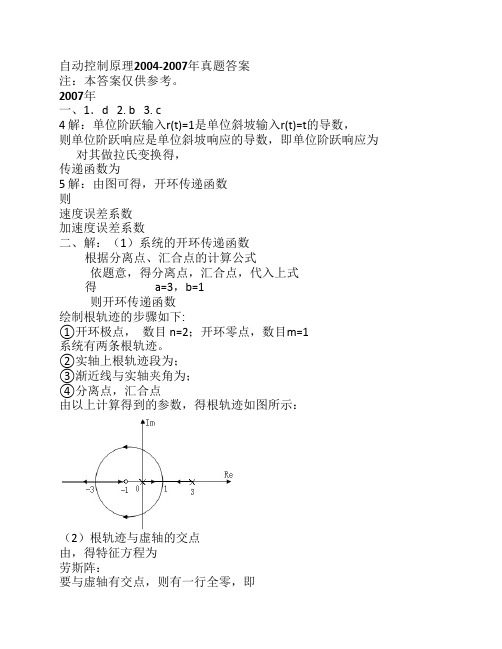
由以上计算得到的参数,得根轨迹如图所示:
(2)欲使超调量,应有 由,得 过坐标原点做与负实轴夹角为的直线,交根轨迹于A点。设A点坐标
为,显然,将其代人特征方程,可得 即当时,可使,闭环极点从()开始,沿根轨迹方向移动。
2)用根轨迹方法验证: 绘制根轨迹步骤如下: ①开环极点, 数目 n=4; 开环零点,数目m=1。系统有4条根轨迹。 ②实轴上根轨迹段为,; ③渐近线与实轴夹角为; 渐近线与实轴交点为; ④与虚轴的交点: 时, 得对应的 与虚轴的交点是
根据以上参数地根轨迹图如下:
由根轨迹图可知,当,时,闭环系统稳定。 可见,与由Nyquist曲线得到的结论是一致的。 (4)K=1时,闭环系统是稳定的,讨论稳态误差是有意义的。
则 可见调节时间为1拍,即1个采样周期。 五、解:(1)由已知得 负倒特性曲线如图7.9所示: 曲线如图7.9所示: 由图可知,负倒特性曲线与曲线有交点。所以存在自持振荡,并且 是稳定的自持振荡。(由不稳定区稳定区)
图7.9 系统曲线和曲线 (2)由,得 由①得, 当时, 由①、②得, 当时, 所以h的范围是 六、解:(1)由图可知,环节A的传递函数为:; 环节B的传递函数为:; 环节C的传递函数为:。 开环系统的总传递函数为:,系统结构图如图8.4所示:
1) 与负实轴的交点: 由,此时 即与负实轴的交点是(-0.83,0);
2) ; 3) ; Nyquist曲线如下:
(3) 1)由Nyquist曲线确定使闭环系统稳定的K值;如图所示: 当-0.83K>-1时,即K<1.2时,Nyquist曲线不包围(-1,j0)点,即N=0,
2014年北京理工大学819物理光学考研真题及答案解析

1 育 明 教 育2015年全国硕士研究生招生考试公告根据《2015年全国硕士研究生招生工作管理规定》,现将2015年硕士研究生招生考试有关事项公告如下:一、初试时间2015年硕士研究生招生考试初试时间为:2014年12月27日至12月28日(每天上午8:30-11:30,下午14:00-17:00)。
超过3小时的考试科目在12月29日进行(起始时间8:30,截止时间由招生单位确定,不超过14:30)。
考试时间以北京时间为准。
不在规定日期举行的硕士研究生入学考试,国家一律不予承认。
二、初试科目初试方式均为笔试。
12月27日上午 思想政治理论、管理类联考综合能力12月27日下午 外国语12月28日上午 业务课一12月28日下午 业务课二12月29日 考试时间超过3小时的考试科目每科考试时间一般为3小时;建筑设计等特殊科目考试时间最长不超过6小时。
详细考试时间、考试科目及有关要求等请见《准考证》。
2 三、报名要求硕士研究生招生考试报名包括网上报名和现场确认两个阶段。
所有参加2015年硕士研究生招生考试的考生均须进行网上报名,并到报考点现场确认网报信息、缴费和采集本人图像等相关电子信息。
应届本科毕业生原则上应选择就读学校所在省(区、市)的报考点办理网上报名和现场确认手续;单独考试及工商管理、公共管理、旅游管理和工程管理等专业学位的考生应选择招生单位所在地省级教育招生考试管理机构指定的报考点办理网上报名和现场确认手续;其他考生应选择工作或户口所在地省级教育招生考试管理机构指定的报考点办理网上报名和现场确认手续。
网上报名技术服务工作由全国高等学校学生信息咨询与就业指导中心负责。
现场确认由省级教育招生考试管理机构负责组织相关报考点进行。
四、网上报名(一)网上报名时间2014年10月10日至10月31日,每天9:00-22:00。
逾期不再补报,也不得再修改报名信息。
(二)网上预报名时间2014年9月25日至9月28日,每天9:00-22:00。
2010年-2021年北京理工大学教育学333考研真题-历年教育综合考研试题
北京理工大学教育学333历年考研真题北京理工大学历年333教育综合考研试题汇总目录北京理工大学2010年333教育综合考研试题 (1)北京理工大学2011年333教育综合考研试题 (1)北京理工大学2012年333教育综合考研试题 (2)北京理工大学2013年333教育综合考研试题 (3)北京理工大学2014年333教育综合考研试题 (4)北京理工大学2015年333教育综合考研试题 (5)北京理工大学2016年333教育综合考研试题 (7)北京理工大学2018年333教育综合考研试题 (8)北京理工大学2019年333教育综合考研试题 (8)北京理工大学2020年333教育综合考研试题(回忆版一) (9)北京理工大学2020年333教育综合考研试题(回忆版二) (10)北京理工大学2021年333教育综合考研试题(版本一) (11)北京理工大学2021年333教育综合考研试题(版本二) (11)北京理工大学教育学333历年考研真题北京理工大学2010年333教育综合考研试题一、名词解释1.班级2.研究法3.勤工俭学4.监生历事制度5.国防教育法二、简答题1.教育对生产力发展的作用表现在哪些方面。
2.论述黄炎培的职业教育理论。
3.论述蔡元培的“思想自由、兼容并包”原则以及其对北大的改革。
4.论述维纳的动机理论。
北京理工大学2011年333教育综合考研试题一、名词解释1.教育学2.课程标准3.研究教学法4.德育北京理工大学教育学333历年考研真题5.六艺教育6.七艺二、简答题1.简述我国教育目的的基本要求(精神)。
2.简述教学过程中直接经验与间接经验的关系。
3.简述“百日维新”中的教育改革措施。
4.简述自我效能感理论及对学习活动的意义。
三、论述题1.论述教师应具备的素养。
2.论述《学记》中的主要教学原则。
3.论述结构主义教育代表人物及主要思想。
4.联系实际论述问题解决能力的培养。
北京理工大学2012年333教育综合考研试题一、名词解释1.教育目的2.发现法3.课程4.骑士教育5.教师专业发展6.朱子读书法北京理工大学教育学333历年考研真题二、简答题1.简述马斯洛需要层次理论。
北京理工大学820应用光学1999-08、11、13-14年(11年回忆版)考研专业课历年真题汇编
第1页,共3页 一、问答题(共60分,每小题6分)
1.用显微镜观察相距0.0005mm 的两物点,采用划线对准的方式,视放大率至少要多少?
2.什么叫望远镜的视角分辨率和衍射分辨率?已知望远镜的视放大率为30×,出瞳距离为1.5mm ,求该望远镜的视角分辨率和衍射分辨率。
3.什么叫主平面?什么叫节平面?主平面和节平面什么条件下重合?
4.什么叫波像差?光学系统成像质量的判断标准是什么?
5.已知棱镜展开厚度为d = 50mm ,折射率n = 1.5,求像面的移动距离。
6.一个发光圆盘(可视为朗伯光源),在与法线成30°角方向上的光强为I 。
求出射光通量。
7.什么是光圈数?在5.6、8、11这几个光圈数中,相同曝光时间下,哪个进光量最大?
8.投影仪分为哪几个部分?分别有什么作用?
9.什么叫场镜?场镜有什么作用?
10.什么叫渐晕?渐晕大小如何表示?
二、叙述及证明题(共30分,每小题10分)
1.描述如何判断平面棱镜系统的成像方向。
2.两组透镜组成倒像系统,对无限远物体成像,焦距分别为f 1′和f 2′,中间的两个透镜之间为平行光。
将倒像系统旋转180°,保持物、像位置不变。
证明系统总的视放大率
2014年攻读硕士学位研究生入学考试试题 科目代码: 820 科目名称: 应用光学
★ 答卷须知
试题答案必须书
写在答题纸上,在
试题和草稿纸上
答题无效。
2016-2017年北京理工大学自动化自动控制原考研参考书目-历年真题答案-新祥旭考研辅导班

新祥旭——唯一专注北京理工大学的考研辅导机构
一、专业信息介绍
控制科学与工程、检测技术、模式识别、导航、系 统工程、电气工程。
北理的自动化分为自动化和电气工程,在填报时, 会让你选定方向,其中自动化:控制理论与控制工程 (较好,录取比例较高,但2012相对来说难度有些增 加),检测技术与自动化装置(较难,复试时会刷些高 分考生,2011年刷了一个374的,2012又刷了许多高 分),模式识别技术(与双控差不多,但招生人数少 些,录取难度适中),系统工程(几乎都是调剂过去 的,难度较小),导航(慎报,很排外,2011年400+外 校才能考上,2102有些意外,325就能进复试)。电气 方面:分为电力系统及其自动化,电机与电器,电工理 论及新技术,近年发展势头很猛,估计以后越来越难考。 还有专业硕士,当你考的分数上了自动化大线,但 复试 没过时,可以调剂过去。
这个阶段应该视野向外扩展,在巩固习题集的基础上,多看些图书馆的其他参 考资料,对习题集进行补充,同时每隔几天做一套历年真题,虽然 09以前的真 题与现在变化很大,但不意味着可以不做,因为每年真题中都有基本方法 ,融 入在其中,对解题思路的形成有很大帮助。 我们也会提供仿真模拟题大家可以 穿插进行,即今天一套明天一套模拟,第三天认真查漏补缺。 4、冲刺阶段(12月-1月) 总结所有重点知识点,包括重点概念、理论和模型等,查漏补缺,回归教材。 温习专业课笔记和历年真题,这时可以相应的做专业课模拟试题。到 1月要调整 心态,保持状态,积极应考。
1.1.4 频率响应方法 掌握:频率响应的基本概念;典型环节的频率响应;开环系统的的频率响应;频 率响应的图示法;最小相位系统;由频率响应求传递函数;基于开环频率响应的 稳定性判据;稳定性裕量。 理解:闭环频率特性;基于频率响应的控制系统的串联校正。 题型及分值:选择填空题和解答题, 占总成绩的 15% 1.1.4 状态空间方法 掌握:状态转移矩阵的求取及其性质;状态方程的解;可控性和可观测性的基本 概念及其判据;状态空间表达式的规范型;状态空间的分解;可镇定性和可检测 性;状态反馈与极点配置;状态观测器的设计;带状态观测器的状态反馈。 题型及分值:解答题,占总成绩的 15%
北京理工大学自动化学院810自控2009-2013年真题详细 回忆版
2009年北理810 真题回忆2010年北京理工大学自动控制原理(810)真题(回忆版)2010年试卷总共九道大题,没有选择填空题,除六七题外,每道大题均在3问到5问之间一、二阶系统分析题目给出了一个二阶系统(带框图需要自己求传递函数)的单位阶跃响应的曲线图,让求其峰值,超调量等,这题不难,只需想到其阶跃响应应该是单位阶跃响应的积分,然后在所给曲线上找到与该图像与X轴的交点,这就是峰值时间,积分面积就是峰值,但是给出的数很怪,很影响人的情绪让人一看就不想做的那种,不过总体说来这应该算是试卷上最简单的题之一了,要分析加计算估计20分钟----25分钟。
二、系统框图分析给了一个框图,第一问让化简,它只是让证明,结果已经给了就是用平常的框图化简方法与Mason公式,我之前做了大量的框图化简的题,结果还是没证出来,应该有难度的,大家可以参考一下东北大学09年的那个框图化简题,应该有这个难度,就是知道框图但是很巧妙化Mason图很容易画错的那种,框图化简也不好弄,第二三四问然后赋予了第一问中的G(s)比较麻烦的式子,让你证明这个那个,比如说该系统对所有的某个参数都稳定啦之类,不难,思路你都会,很麻烦,一遍做对很不简单,要完整做完至少至少30分钟(如果你计算能力超强,写字很清晰的话)。
三、状态空间方法第一问还是证明,很麻烦,类似06年第二题,不过T矩阵让你自己取,然后他还给你了一个取矩阵的方法,也是很麻烦,不过如若你线性代数学得好的话,你可以根据给的那个方法一眼抽出该矩阵怎么取,不过计算量超大的,那个变换后的A矩阵,应该是T的逆乘A乘T,这里面T是4*4矩阵,A是含t的约旦标准型,结果可以从试卷这边写到那边,这一问做出来,至少20分钟,后面还有三问,判断可控客观性什么的,这个简单,但通篇做出来,至少30分钟吧。
四、根轨迹方法:用了第一题还是第二个题的框图来着,忘了,让画根轨迹,非最小相位环节的,两个复数零点两个开环零点,光求那个分离点,四个分母通分化简嘛,何况还是复数的,每个通分后都是三项,求出分离点就二十分钟没了,何况还要求什么入射角出射角什么的,第一问保守35分钟,第二问第三问没心情做了,当时一看时间过去一大半了,铁定做不完了,让证明对所有什么都稳定之类,当时脑子糊糊,没啥思路,应该要转个弯的。
2014年北京理工大学工程在职硕士考研真题

2014年北京理工大学工程在职硕士考研真题各位考研的同学们,大家好!我是才思的一名学员,现在已经顺利的考上北京理工大学工程专业,今天和大家分享一下这个专业的真题,方便大家准备考研,希望给大家一定的帮助。
第一部分语言表达能力测试题(50题,每题2分,满分100分)一、选择题1、下列加点字的释义全都正确的一组是A、声振寰.宇(天下)瞬.息万变(一眨眼)挺.身而出(挺直)B、兢兢..业业(谨慎)扪.心自问(拍打)顺理.成章(道理)C、金声玉.振(玉石)不可理喻.(晓喻)颠.扑不破(抬高)D、相辅.相成(辅助)洋洋洒洒..(流畅)莫衷.一是(忠心)2、下列各句中没有错别字的一句是A、不可狂妄自大,也不要枉自菲薄。
B、诗歌是忌娇揉造作,无病呻吟。
C、他自顾不遐,哪里还能顾及他人。
D、经过长途跋涉,他风尘仆仆赶到这里。
3、对下文中所用修辞手法的表述,准确的一项是桃花、杏树、梨树,你不让我,我不让你,都开满了花赶趟儿,红的像火,粉的像霞,白的像雪,花里带着甜味,闭了眼,树上仿佛已经满是桃儿、杏儿、梨儿!花下成千成百的蜜蜂嗡嗡地闹着,大小的蝴蝶飞来飞去。
野花遍地都是,有名字的,没名字的,散在草丛里,像眼睛,像星星,还眨呀眨的。
A、拟人、比喻、顶真B、排比、比喻、拟人C、排比、比喻、递进D、拟人、顶真、夸张4、下列各句中,加点的成语使用恰当的一句是A、作为人民大众所欢迎的文艺工作者,难道在艺术上不应该精益求精....吗?B、五四以后,旧体诗意境式微,即使偶尔有人唱和写作,也不过是噤若寒蝉....。
C、在这次学术会议上,专家学者们高谈阔论,肆无忌惮....。
畅所欲言。
D、放眼望去,满园的牡丹姹紫嫣红....,美不胜收。
5、下列各句中,没有语病的是A、该电厂每年的发电量,除供当地使用外,还向北京、天津输送。
B、随着科学技术日新月异的发展,电脑已成为人们不可或缺的工具。
C、国产电视机的价格一降再降,有的甚至下降了一倍。
2014年北京理工大学工程在职硕士考研真题汇编

2014年北京理工大学工程在职硕士考研真题汇编各位考研的同学们,大家好!我是才思的一名学员,现在已经顺利的考上北京理工大学工程专业,今天和大家分享一下这个专业的真题,方便大家准备考研,希望给大家一定的帮助。
第三部分逻辑推理能力测试题(50题,每题2分,满分100分)1、哲学家:“我思考,所以我存在。
如果我不存在,那么我不思考。
如果我思考,那么人生就意味着虚无缥缈。
”若把“人生并不意味着虚无缥缈”补充到上述论证中,那么这位哲学家还能得出什么结论?A、我思考B、我不思考C、我存在D、我不存在2、有5名日本侵华时期被抓到日本的原中国劳工起诉日本一家公司,要求赔偿损失。
2007年日本最高法院在终审判决中声称,根据《中日联合声明》。
中国人的个人索赔权已被放弃。
因此驳回中国劳工的诉讼请求。
查1972年签署的《中日联合声明》是这样写的:“中华人民共和国政府宣布:为了中日人民的友好,放弃对日本国的战争赔偿要求。
”以下哪一项与日本最高法院的论证方法相同?A、王英会说英语,王英是中国人,所以,中国人会说英语。
B、我校运动会是全校的运动会,奥运会是全世界的运动会;我校学生都必须参加校运动会开幕式,所以,全世界的人都必须参加奥运会开幕式。
C、中国奥委会是国际委会的成员,Y先生是中国奥委会的委员。
所以,Y先生是国际奥委会的委员。
D、教育部规定,高校不得从事股票投资,所以,北京大学的张教授不能购买股票。
3、《乐记》和《系辞》中都有“天尊地卑”、“方以类聚,物以群分”等文句,由于《系辞》的文段写得比较自然,一气呵成。
而《乐记》则显得勉强生硬,分散拖沓,所以,一定是《乐记》沿袭或引用了《系辞》的文句。
A、经典著作的形成通常都经历了一个由不成熟到成就的漫长过程。
B、《乐记》和《系辞》都是儒家的经典著作,成书年代尚未确定。
C、“天尊地卑”在比《系辞》更古老的《尚书》中被当作习语使用过。
D、《系辞》以礼为重来讲天地之别,《乐记》以乐为重来讲天地之和。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.系统建模分析 (15分) 机械位移系统如图1所示,其中r (t )是输入力。
K 1和K 2是弹簧弹性系数。
m 1和m 2是两个质量块的质量。
阻尼器b 1对m 1的阻尼力为b 1y 1(t ),阻尼器b 2对m 1的阻尼力为b 2�y 1(t )−y 2(t )�。
系统初始状态为[y 1(0)y 1(0)y 2(0)y 2(0)]T =0
(1)取x (t )=[x 1(t )x 2(t )x 3(t )x 4(t )]T =[y 1(t )y 1(t )y 2(t )
y 2(t )]T 为状态变量,
r (t )为输入,y (t )=y 1(t )为输出 ,建立系统的状态空间表达式。
(2)有状态空间表达式画出系统方框图。
二.动态性能分析 (10分) 已知二阶系统如图2所示,其中G (s )=ωn 2
s (s+2δωn
),0<δ<1,r (t )为参考输入,y (t )为输出
(1)计算系统的单位阶跃响应及其峰值时间T p 和最大超调量M p 。
(2)如图2所示,令系统参考输入r (t )=R 1U −1(t )+R 2U −1�t−t p �,其中U −1(t )为单位阶跃函
数R 1=�1+M p �−1
且R 2+R 2=1,用叠加原理证明:当t ≥tp 时有y (t )=1。
三.状态空间方法 (15分) (1)离散时间控制系统如图3所示,试求系统输出的C (z )的表达式(需要详细推导步骤)。
(2)系统结构图如图4,试求使系统稳定的采样周期T 的取值范围,已知
图1 一个机械位移系统示意图
Z �1s 2
�=Tz z−1,Z �1s
�=z
z−1,Z �1s+a
�=z
z−e
四.状态空间方法 (20分) 如图5所示,
(1)将图5化简为图6形式,并分析系统可控和可观性,若系统不是完全状态可控或可观测性的,确定其可控或不可观测的模态
(2)取X 1(t )和X 2(t )为系统的状态变量,u (t )为输入,y (t )为输出,建立系统的状态空间表达
式并用模态判据(PBH )验证(1)的结论。
s )图6
五.根轨迹方法 (20分) 考虑图7所示系统,其中C (s )=K ,P (S )=N (
S )
D (S )
=
S+3
S (S+2)(S +2S+1.5)
(1)确定根轨迹的分离点和汇合点,与虚轴的交点以及对应的临界根轨迹增长K cr ,画出根轨迹:( 提示:用于确定分离点和汇合点的多项式D (S )
d
d s N (S )−N (S )d
d s
D (s )的根为
−3.6241,−1.6365,−0.7030±j0.1077这里的j 2=−1为虚数单位,且P (−0.7030±j0.1077)=−
(2)确定使闭环系统稳定的K 值范围。
六.频率响应分析 (20分) 再次考虑图7的系统,其中C (s )=K ,P (s )=
N (s )D (s )=
1
3s+1s (0.5s+1)�1s 2+2
s+1�
(1)证明Nyquist 曲线P (jω)与实轴相交于−1
R �即存在实数R ,使得P (jω)=−1
R
�则有ω4+
6.5ω2−9=0,R =4ω2−3。
(2)根据(1)的结果画出Nyquist 曲线P (jω)并由此确定使得闭环稳定的K 值范围。
七.非线性分析 (15分) 如图8所示非线性系统中,非线性特性为x (t )=e 5(t ) (1)确定自激振荡频率和幅值。
(2)说明自己自激振荡的稳定性。
八.Lyapunov 稳定性 (15分) 非线性系统由下列微分方程描述
x 1
=−6x 1−x 2 x 2
=2x 1−6x 2−2x 23 (1)证明x 1=0,x 2=0是系统唯一的平衡态
(2)确定K 的取值范围,使得能量函数V (x )=1
2
x 12+K
2
x 22是平衡态的一个大范围Lyapunov 函
数,从而平衡态是大范围渐进稳定的。
(3)用Krasovaskii 方法证明系统平衡态的稳定性。
九.最优控制 (20分) (1)求使性能指标泛函 T =∫[x 2+x 3]d t 1
0 取得最大值的轨线x (t )其中∗x (0)
=0,∗x (1)
任意。
(2)已知线性系统的状态方程x =Ax +Bu ,其中A =�0100�,B =�10
01�,x =
�x 1x 2�,u =�u 1
u 2
�,系统初始状态为 x (0)=0,终态为
x
(2)=0,求u (t ),使性能指标T =1
2∫(u 12+u 22)d t 2
为最小。
图9 关于加法器的说明。