无线电遥控车辆模型基础知识
FPV基础介绍
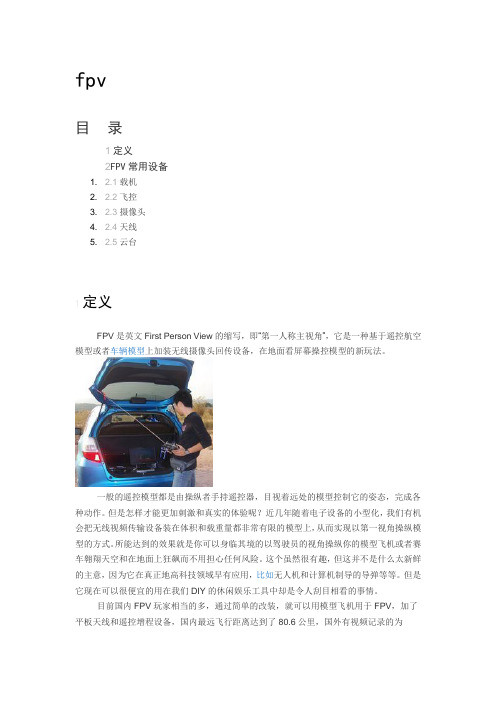
fpv目录1定义2FPV常用设备1. 2.1 载机2. 2.2 飞控3. 2.3 摄像头4. 2.4 天线5. 2.5 云台1定义FPV是英文First Person View的缩写,即“第一人称主视角”,它是一种基于遥控航空模型或者车辆模型上加装无线摄像头回传设备,在地面看屏幕操控模型的新玩法。
一般的遥控模型都是由操纵者手持遥控器,目视着远处的模型控制它的姿态,完成各种动作。
但是怎样才能更加刺激和真实的体验呢?近几年随着电子设备的小型化,我们有机会把无线视频传输设备装在体积和载重量都非常有限的模型上,从而实现以第一视角操纵模型的方式。
所能达到的效果就是你可以身临其境的以驾驶员的视角操纵你的模型飞机或者赛车翱翔天空和在地面上狂飙而不用担心任何风险。
这个虽然很有趣,但这并不是什么太新鲜的主意,因为它在真正地高科技领域早有应用,比如无人机和计算机制导的导弹等等。
但是它现在可以很便宜的用在我们DIY的休闲娱乐工具中却是令人刮目相看的事情。
目前国内FPV玩家相当的多,通过简单的改装,就可以用模型飞机用于FPV,加了平板天线和遥控增程设备,国内最远飞行距离达到了80.6公里,国外有视频记录的为113km,最快时速达到120km/h,高度达到3252m,加了自动巡航系统,OSD视频合成(显示电池的电压,电流,电量,)和GPS的定位(显示起飞的座标和离起飞的距离和方向,高度和速度)和失控返航的设备,让FPV更具可玩性。
随着飞行控制模块和地面站系统的配合使用,FPV系统已经可以实现全自动、定点定时定高巡航,自动驾驶、人工控制与电脑驾驶混合模式,数据实时传输等功能。
但是,目前关于超出视线FPV的安全性和法律规范性还存有一定的争议。
FPV的设备组成:载机、天线、视频发射机、视频接收机、图像显示存储、遥控增程、摄像机组成。
2FPV常用设备载机装载航拍设备和系统用的航空器。
目前国内玩家常用载机:天行者冲浪者飞翼翼龙天行者1680 塞斯纳182 LB-X8飞控REMZIBI-OSD中文界面自动飞行时飞机是由电脑按设定程序智能控制自动飞行的。
遥控赛车工作原理
遥控赛车工作原理
遥控赛车工作原理
以遥控赛车工作原理为标题,我们来了解一下遥控赛车的工作原理。
遥控赛车是一种通过无线电波控制的玩具车,它的工作原理是通过遥控器发射无线电波信号,遥控器内置的电路将信号转换成控制信号,然后通过天线发射出去。
遥控赛车内置的接收器接收到信号后,将信号转换成电信号,再通过电路控制电机的转动,从而控制赛车的行驶方向和速度。
遥控赛车的遥控器通常由电池、发射器、天线和控制电路组成。
电池提供电源,发射器将电路产生的信号转换成无线电波信号,天线将信号发射出去。
控制电路是遥控器的核心部分,它将操作者的指令转换成电信号,再通过发射器发射出去。
遥控赛车内置的接收器通常由天线、接收电路、电机和电池组成。
天线接收到发射器发射的无线电波信号后,将信号转换成电信号,接收电路将电信号转换成控制信号,再通过电路控制电机的转动,从而控制赛车的行驶方向和速度。
遥控赛车的工作原理是通过遥控器发射无线电波信号,遥控器内置的电路将信号转换成控制信号,然后通过天线发射出去。
遥控赛车内置的接收器接收到信号后,将信号转换成电信号,再通过电路控制电机的转动,从而控制赛车的行驶方向和速度。
遥控坦克原理

遥控坦克原理
遥控坦克是一种通过遥控信号来操作的战斗模型,它模仿了真实的坦克,拥有机械、电子、通讯等多种技术,具有高仿真、高可靠性和强的逼真感。
遥控坦克的原理首先是遥控信号的传输。
现在流行的遥控坦克一般采用无线电控制系统,由遥控器发射信号,接收器通过天线接收后放大、解码,然后将信号传送到微控制器内部。
这一过程相当于将人所发出的指令通过电磁波无线传输到坦克车身,为后续操作提供指令基础。
其次是遥控坦克的电力系统。
遥控坦克所采用的电力系统多采用锂电池,因为它具有较高的能量密度,能够提供可靠的加速和控制动力输出。
电路系统则是利用集成电路的设计及应用,将其设计为专用的运动控制电路。
接下来,是遥控坦克的传动系统和转向系统。
传动系统包括驱动电机、电子调速器和减速齿轮箱。
驱动电机提供动力和扭矩,电子调速器控制马达的运动速度,减速齿轮箱则协助电机将动力传递给车轮。
转向系统一般采用轮叶式转向,通过车轮的旋转来实现转向。
最后就是遥控坦克的操作系统。
它主要包括了电源控制、电机控制、转向控制、操纵杆控制等,为遥控者提供了完整的坦克操作体验。
操作者通过手柄对坦克进行控制,当操作者移动操纵杆时,遥控器发出指令,车身接收到信号后,通过指令实现相应的驾驶和行动。
遥控坦克能够实现复杂的运动技巧和动作,并支持多人和团队游戏,增强了用户的沟通和交流体验。
在现代生活中,遥控技术已经广泛应用到小型模型的遥控、无人机、机器人等领域。
未来,遥控技术将不断发展,为我们带来更多惊喜和想象。
关于航模的常识
近年来,无线电遥控设备已经进本商品化。
由于大量采用集成电路成本降低、可靠性增加,业余制品已经很难达到商品设备的水平。
而且在时间价值越来越高的时代,大多数航模爱好者已经不愿耗费大量的时间去自制遥控设备,而把时间用来制作更加精美的模型。
但是,无论怎样高级的设备,要想可靠地工作,仍有赖于正确的使用与维护。
除了通过书本知识之外,还需要在时间中不断地积累宝贵的经验。
(一)地面检测:1.电源检查及充电:商品设备中,竞赛型设备的电源都使用镍镉电池,普及型设备电源多为干电池。
对镍镉电池须进行合理的充电。
设备中配有充电器的,可以直接用来对电池充电。
没有配充电器的,可用其他充电器代替充电。
充电电流控制在电池容量的十分之一。
譬如500mAh的电池,充电电流应50mA。
第一次充电时间是16--18小时,以后每次只充14小时。
按道理,新电池进行两次充、放电之后才能正式投入使用,这样可以保证电池容量和寿命达到规定标准。
同时在充、放电的过程中也可以检查电池质量,我们应当禁令这样去做。
但在实际使用当中,常常发射机电池不易取出,所以有时也在使用中放电一面进行地面测试、拉距离,一面把电耗完。
但一定要使用电压降至平均单节电压1.1V时再进行第二次充电。
这时积累放电时间应超过一百二十分钟。
不是使用镍镉电池的设备,先把发射机、接收机的电源电压核对清楚,千万不能搞错。
目前商品设备的发射机电源不超过12V,接收机电源电压不超过6V,而且工作电压允许有一个变化的范围。
通常情况下,发射机为9.6--12V,接收机为4.8--6V。
当使用干电池时,应把电压配在上限使用。
值得注意的是:干电池的质量因生产厂家、保存时间长短而差异很大,对实际容电量难以掌握,因此建议尽量采用镍镉电池。
2.开机检查:首先将发射机天线全部拉出,打开电源开关。
这时,电平指示表应指示在绿色或白色区域的上方。
把天线缩短时,电平指示将下降,然再在将接好伺服舵机的接收机电源接收通,舵机应回到中立位置;拨动操纵杆和微调手柄,相应舵机应有动作,各通道也不互相干扰,说明发射机和接收机工作基本正常。
遥控车

3.舵机(servo):舵机把接收机传来的信号转换为机械的动作。比如改变方向等等。
2、油动遥控模型车(Gas Power) 简称GP
油动遥控模型车(简称油车)是彭湃动力的化身,油车是使用遥控模型车专用的燃料(不是汽油,当然模型车中也有使用汽油作动力的车种,比例为1:5,亚洲极少人玩)。绝大部分油车都是使用二冲程风冷发动机,这种发动机的优点是加速快,维修简单。现在的1:10油动房车(平跑车)的发动机输出已经达到2匹马力,在重量不到2KG的车架中使用2匹马力的发动机作动力,可以预计油车的速度一定十分惊人,在直路上:以1:10油房为例,达到80KM是很容易的事情,100KM也绝非难事,而且加速十分迅速,由静止到60KM,大概2秒可以完成。近年国内和港澳地区十分流行油车,原因是:每次玩油车的时间可以比较长,只要不断补充燃油就可以连续行走(电车在10分钟内就没电,比赛级别modify的电车6分钟就没电),而且油车的加速凌厉,彭湃的发动机声浪使人觉得兴奋,加上油车需要维护的设备少,近几年油车的赛事也较多。油车越来越受欢迎,即使是初学者,选择购买油车也是一个好选择,现在油车的保养维护已经比较简单,而且油车比赛的时间长,更好提高驾驶技术,积累更多经验!
想要你的模型车子要跑得快,跑得稳定,在比赛中取胜,有两个重要因素:
第一:车架本身的调教是否很好配合到场地状况,发挥车辆的最大潜能;
第二:操控者(车手)的操控水平,心里素质是否过关。
看到这里是否觉得现实中的赛车运动和遥控模型车运动差不多呢?例如在F1赛车中,车队要调教出适合赛道的车架设定,然后比赛时候就看赛车手的发挥了,我们遥控模型车竞赛也是这个道理的。
遥控行车讲义

三,F24-60的操作
1,平常操作
将电量饱满之AA型(5号)电池四颗放入电池盒内。
依正确方向将电池盒放入发射器之电池放置区内, 并锁上电池盖。
放置钥匙开关于发射器上后转至ON的位置。
依设定之开机模式开机。注:未按操作步骤开机 LED指示灯会闪红灯并快速闪烁。
按照发射机上各按键所设定之功能正确操作。
在发射端要对晶振进行整数分频,分频系
数一般取12,所以455kHz÷12≈37.9 kHz≈38kHz。也有一些遥控系统采用36kHz、 40kHz、56kHz等,一般由发射端晶振的振荡 频率来决定。
3,红外遥控的特点;
红外遥控的特点是不影响周边环境、不干 扰其它电器设备。由于其无法穿透墙壁,故 不同房间的家用电器可使用通用的遥控器而 不会产生相互干扰;电路调试简单,只要按 给定电路连接无误,一般不需任何调试即可 投入工作;编解码容易,可进行多路遥控。
石英晶体标示如下 ;
T:321MHz R : 331.7 MHz
用于发射器发射频率为 321MHz
用于接收机接收频率为 331.7MHz
3,识别码遥控配对(ID Code Remote Setting)
当遥控器的接收机或发射机故障时,若 要以新的接收机或发射机替代,但识别码不 同时,可以使用遥控配对设定(Remote Setting)方式,将发射机及接收机设定成相 同之识别码才能正常工作。遥控配对设定时, 发射机与接收机须使用相同频道和相同机种, 且尽可能在近距离下操作,以防止接收机收 不到遥控设定的讯号。识别码遥控配对之操 作方法如下:
“数据”输出是指把一些发射键编上号码,利用 接收端的几个输出形成一个二进制数,来代表不同 的按键输入。
一般情况下,接收端除了几位数据输出外,还 应有一位“数据有效”输出端,以便后级适时地来 取数据。这种输出形式一般用于与单片机或微机接 口。 除以上输出形式外,还有“锁存”和“暂存” 两种形式。所谓“锁存”输出是指对发射端每次发 的信号,接收端对应输出予以“储存”,直至收到 新的信号为止;“暂存”输出与上述介绍的“电平” 输出类似。
无线电遥控的基本知识

无线电遥控的根本知识为了使初次接触遥控的朋友们能够对它有一个大致的了解,特地参考了华联出版的一本由董炯明先生编著的电动遥控模型制作和其他相关资料篡写了这篇文章,如果有不到之处还请多多提出指正。
利用高频无线电波实现遥远控制的技术简称为遥控,它起源于第一次世界大战。
早期的控制信号是单一的,如超再生式收发报装置一样只能控制单一的动作,之后过渡到超外差式和音频谐振继电器式等,使得多路信号的收发成为可能;随着电子技术的进步,出现了比例遥控方式和通道更多的设备,现在已经可以做出几十、几百通道的设备了〔国外已经有20个以上通道的设备面市,震华遥控也在02年应要求生产过100台供表演模型和机器人比赛用的设备〕下面简要介绍一些有关知识,为了简化就不对原理作过多的解释,如果有感兴趣的朋友可以去看电子的?无线电遥控技术?等书籍。
1.几个名词:什么是比例遥控?这是指受控模型的动作幅度〔或速度〕与操纵者扳〔转〕动发射机操纵杆的动作成比例关系。
例如扳动操纵舵角的操纵杆到一半角度,那么船或飞机的方向舵也会转动到最大舵角的一半。
什么是通道?通道也称Ch,简单地说就是指控制模型的一路相关机能。
例如前进和后退是一路;左右转向是一路;空模中的升降也是一路;还可以是一组控制其他动作的〔如炮塔的左右;上下俯仰;鸣笛、亮灯等〕,但是各个通道应该可以同时独立工作,不能互相干扰。
2. 一套遥控设备的根本组成:包括发射机〔分车模用枪式和空、海模用杆式等〕,接收机〔有普通型和超小型之分〕,伺服机〔也叫舵机,分类和详细介绍请参看本栏〈关于遥控伺服机的应用知识〉等文章〕和电子调速器〔即电调,分空模用单向电调和车、船用双向或带刹车的等〕,一般一个伺服机或电调就要占用一个通道。
另外还有给它们供电的电源和开关,电源大多使用充电电池或蓄电瓶,其中充电电池又有镍镉、镍氢、锂电池和聚合物锂电池等,综上所叙就组成了一套遥控设备。
3. 遥控设备在模型上的使用:一般车、船用的根本型为两通道,左边一个通道大多用于控制前进、后退〔用电调的还可以变速〕;右边一个通道用来控制左右方向。
RC基础知识
RC基础知识RC基础知识0000什么是遥控设备的"通道"?我们经常听到的某遥控设备为4通道中的"通道"简单的讲指的就是"功能",如4通道可以理解为具有4种功能。
具体是什么功能就要看您把他用在什么地方,如果是电动遥控车辆与舰船那么一般只需要2通道实现前后(1个功能)、左右(另1个功能);如果是入门级的滑翔飞机一般也只需要2通道实现动力同时起到升降(1个功能)、左右(另1个功能);高级一些的滑翔机或初级教练机会将升降功能独立出来,这样就需要再增加一个通道(共3个通道);一般的教练机则需要至少4个通道,分别实现动力、升降、左右、横滚(副翼)功能。
在这里,需要特别提醒初学者在众多中低档遥控玩具的说明中常常出现"全方位、前进、左进、右进、后退、左退、右退、停止、7功能"这样的词汇,这里的功能不是模型中的通道,其实很容易看出这里的7功能只对应模型中的2通道(前后、左右)!什么是遥控设备的"全比例"、"非比例"、"分级比例"?我们经常听到的某遥控设备为"全比例"设备,"全比例"的遥控方式就是模拟现实生活中存在的众多的一种比例控制方式。
我们用驾驶车辆来说明这一点,车辆行驶的速度是与油门踏板的踩踏深度息息相关的,油门踏板被踩的越深速度越快。
方向也是一样,方向盘打得越多,转向半径就越小。
这些都体现了一种正或反比例的关系。
"非比例"的遥控方式则把一切的关系简化为"开与关",同样是开车,他没有速度的区别只有"走与停",也没有大小方向的区别只有"左与右"。
所以他只被应用在低端的遥控领域,或者只需要开与关的领域。
"分级比例"则把某个功能的实现分为"几个阶段",比如飞机的动力我们可以分为"爬升"、"平飞","下降"3个阶段,可以在这3个阶段中自由切换。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无线电遥控车辆模型基础知识第一章 车辆模型运动简介一、车辆模型的种类车辆模型(简称车模)运动集知识、技能、娱乐、休闲为一体,以其独有的知识性、趣味性,令众多学生如醉如痴,乐此不彼。
虽然其发展历史远不如航空、航海模型那样悠久,却由于项目种类多、活动场地广、比赛的可观赏性及娱乐性强,发展非常常迅速,已呈后来居上之势。
车辆模型种类很多,有不可操纵的静态观赏模型车,也有简单的四驱轨道车、直线竞速车,我们这里所讲的车模主要是指利用无线电遥控的车辆模型。
无线电遥控车辆模型,按其与真车的比例有1/18、1/16、1/12、1/10、1/8等多种;按其动力方式可分为电动力车和内燃机动力车;按车模行驶的场地路面又可分为公路赛车和越野赛车。
目前,在世界各国,竞赛活动比较多的项目主要有:(1)1/18电动仿真赛车;(2)1/16电动仿真赛车;(3)1/12电动仿真赛车;(4)1/10电动仿真赛车;(5)1/10电动越野赛车;(6)1/8内燃机公路赛车;(7)1/8内燃机越野赛车;(8)1/10内燃机越野赛车;(9)1/10内燃机仿真赛车。
其中1/10电动仿真赛车和1/10内燃机仿真赛车是新发展起来的项目,但由于外形逼真、性能优越,它的流行程度远远超过以往任何一个车种,已经成为遥控赛车发展的主流。
为了迎合这种潮流,国际车模组织开始研究制定赛例,并于1998年首次举行了世界锦标赛。
二、车辆模型比赛车辆模型的比赛与真车的比赛很想像,通常是在专门设置的封闭跑道内进行。
跑道由多个不同的直道和弯道组合而成,宽度为3—5m。
公路赛车跑道一般是平坦的沥青或水泥路面;而越野赛道通常为沙土地或草地,还要人为设置一些跳坡、断桥等障碍。
比赛时通常是十部车一个编组,在规定时间内看谁跑的圈数多,由专门的记时记圈装置自动记录成绩。
经过这样若干轮的预赛后,将所有的参赛者的最佳成绩依次排列,前十名为A组,第11名至第20名为B组………以此类推,然后按组别开始决赛,决出各组别的冠、亚、季军。
当然A组的水平最高,奖项和荣誉也最高。
模型赛车比赛的时间也各不相同。
电动力车由于电池能量有限,通常为4—5分钟,而内燃机动力赛车由于可随时添可燃料,一般预赛为5—8分钟,决赛往往延长至30分钟,甚至一小时。
不言而喻:若想在比赛中获胜,参赛者除了要有高超的操纵技巧,还要有良好稳定的心理素质以及与助手的默契配合。
长时间比赛对参赛者的耐力、反应及应变能力也都是一个严峻的考验。
同真赛车一样,车模比赛的场面紧张刺激,超车、撞车、意外翻车、冲出跑道等情况都时有发生。
但车模比赛又总是“有惊无险”,绝不会有爆炸起火、人身伤亡等重大事故,所以更具有趣味性。
更有许多爱好者本身就是赛车迷,虽然他们无缘去接触那些真赛车,但他们可以选择与真赛车一样的模型车款式,并自己动手美化与真赛车一模一样。
然后,俨然自己就是赛纳、舒以赫,在赛道上一显身手,大过赛车瘾。
三、车辆模型运动的发展车辆模型活动是随着现代电子科学技术的发展而产生的。
1970年代中期,模型用无线电遥控设备逐步实现了商品化,性能也日趋完善,从而带动了车辆模型的发展。
1979年,第一个国际车模组织——国际车辆模型联合会(IFMAR)成立,开始划分车种,制定比赛规则并定期举办世界锦标赛和地区性比赛。
1982年底,亚洲、大洋洲地区的车辆模型组织——远东车辆模型协会(FAR EAST MODEL CAR ASSOCIATION)在新加坡成立,日本、泰国、澳大利亚、新加坡以及香港、澳门等国家和地区都成为会员。
近年来,国外的车模活动发展很快。
在许多国家和地区,车模活动被列为政府提倡的健康有益的娱乐活动之一,趣味性和商业气息并存的赛事活动十分频繁。
不同层次、职业、年龄的爱好者通过各种比赛切磋技艺,交流情感,增进友谊,丰富了自己的业余生活,并从中吸取知识,经受锻炼,得到乐趣。
我国的车模活动起步较早,几乎与国外先进国家同步。
早在1980年代初上海、广州、辽宁等地就陆续出现了有组织的车辆模型竞赛活动。
1983年辽宁省举办了七省市车辆模型邀请赛,当时有18个队、68人参赛。
1985年由国家体委、中国科协联合举办的首届全国青少年车辆模型表演赛在北京举行。
次年,国家体委颁布了“车辆模型竞赛规则”,并从此开始了每年一次的全国青少年车辆模型比赛。
为了在更广的范围内开展车模活动,国家体育总局从1997年开始,每年举办一届全国车辆模型锦标赛。
附1:国内比赛常设设项目:全国锦标赛:(1)1/10电动越野赛车;(2)1/10仿真电动房车;(3)1/10仿真内燃机房车;(4)1/8内燃机越野赛车;(5)1/8内燃机公路赛车。
全国青少年(仅限在校中小学生参加):(1)1/12电动公路赛车;(2)1/10电动越野赛车;(3)1/10仿真电动房车;(4)1/10仿真内燃机房车;(5)1/8内燃机越野赛车。
第二章 无线电车辆模型的基本构造和原理为使大家便于学习和理解,先介绍几个常用技术术语:1、不足转向:不足转向是指车辆在转弯时的实际转向少于驾驶者的原定要求,这种情况在前轮驱动车上最为明显。
理论上讲,不足转向并不是最理想的行驶状态,但理论归理论,在实际操作中,大多数模型车手都选择了不足转向这种调整状态,而且在比赛中取得了令人满意的成绩。
这大概是不足转向带来的良好的安定性发挥了作用吧。
2、过度转向:与不足转向正好相反,过度转向是指车辆的实际转向大于驾驶员的原定要求,也就是过于灵活的转向。
我们经常看到有些模型车尤其是后轮驱动车在正常转弯时会突然来个180°调头(通常称之为甩尾),这种状态大多是过度转向造成的。
而造成过度转向的原因可以简单的归结为前轮的附着力相对大于后轮。
过度转向是应该尽量避免的。
3、最小离地间隙:就是车子的底盘与地面之间的距离,它将直接影响到车辆的通过性和稳定性。
对一部模型车来说,离地间隙的改变相当于重心的改变,而重心的改变又会带来行驶性能的改变。
重心高,模型车在转弯时车体倾斜幅度较大(离心力的作用),转弯会较容易些而转弯之后则容易摇摆;重心低,则转弯相对稍迟钝但比较稳定。
4、前束与后束:从车辆的上方俯视下去,左右车轮并不一定是平行的,如果角度偏向内侧,即两轮呈内八字形就叫作前束;反之,两轮呈外八字形就称为后束。
5、内倾角和外倾角:从车的前(后)方看车轮,车轮并不一定完全垂直于地面,两轮间的距离如上窄下宽,即呈八字形称内倾;如上宽下窄呈倒八字形则称外倾。
在车辆直行时,不管内倾外倾,都会减小轮胎与地面的接触面积。
6、后倾角:也称转向主销后倾角,即从侧面看车轮,转向主销(车轮转向时的旋转中心)通常是向后倾斜的,这个倾斜角叫后倾角。
7、重心:在遥控模型车上,重心位置对车辆的影响很大,重心位置的高低、前后变化,都会直接改变车辆的行驶性能。
如:重心位置比较高的车辆,转弯时车体倾斜得较大,会比较灵活一些,但行驶稳定性会变差。
又如:重心靠后的车辆,起步加速会快一些,但转弯时又会由于前轮(转向轮)负载较小,转向会有些迟钝。
这些都是与重心有关的。
一、底盘构造和特点底盘是车辆模型的基本骨架,用来承载动力装置、传动机构和悬挂装置,一般要求要有足够的强度和刚性。
按其构造有澡盆型、平板型及箱型几种。
平板型底盘都采用环氧玻璃钢或碳素纤维材料,而内燃机动力模型车为考虑发动机的散热,几乎都采用铝合金板材作底盘;箱型构造的底盘多为一些性能要求不高的普及型模型车采用,以工程塑料注塑成型,缺点是重量稍大;近年来,更多的模型车产品开始采用混有碳纤维的塑料澡盆型底盘,重量轻、强度大,又降低了生产成本。
二、车辆模型的传动形式可以说:传动形式决定着车辆的性能。
车辆模型的传动形式可以分为:前轮驱动、后轮驱动和四轮驱动。
前轮驱动的车辆由于是靠前轮牵拉车身,通常稳定性很好,但也有其致命的先天不足:首先,因车辆加速时重心后移,反而使驱动轮(前轮)负载变小,影响了加速;其次,前轮驱动的车辆具有转向不足的特性,使转弯很迟钝;再有,其前轮既是驱动轮又是转向轮,前轮胎负担很大,磨损很快。
所以,前轮驱动的传动形式多用于一些玩具或入门用的模型车上,竞赛用车很少采用。
后轮驱动与前轮驱动形式成了鲜明的对比:它的重量集中于车辆的后部,布局非常合理,动力传输路程短,加速时牵引力大,车身结构也比四轮驱动车要简单,因而使组装、维护都很容易。
有一些比赛用的模型车,在规则中就限定必须采用这种传动形式。
但后轮驱动的模型车在转弯性能上也存在一些问题,就是容易出现过度转向,尤其是在地面附着力较小的路面,驾驶变得很困难,甚至要小心翼翼才行。
这是后轮转向车的通病。
同样的一部后轮驱动模型车,在摩擦力很好的沥青路面,可以发挥出相当高的性能——极高的车速、得心应手的操纵……而到了光滑的水泥路面,则会大打折扣,不仅跑不出应有的速度,还会使操纵变得十分困难。
也可说,后轮驱动车对路面的要求是比较高的。
我们再来看看四轮驱动:这种驱动方式起源于以前的军用吉普车。
与其它方式相比,它的特点是驱动力可以很好地传递,路面适应能力强,尤其善于越野。
在真车上,四轮驱动车的爬坡能力是普通车的2倍。
大部分模型车如:各种越野车、电动或油动房车以及内燃机公路赛车都采用这种传动方式。
一般来说:模型车的驱动力与其自身重量相比,功率之大是真车所无法比拟的,而四轮驱动的驱动方式可以很好地将这充沛的驱动力分配到4个车轮上,减少了轮胎打滑、浪费动力的现象,所以在模型车上得到了广泛的应用。
然而,四轮驱动并非尽是优点,它的传动路程长,结构复杂,车辆重,传动损耗也大。
在真车上,我们可从油耗的增大看出这一点。
在模型车的传动机构中,方式也是多种多样的:有齿轮传动、轴传动、齿轮+皮带的组合式传动等等,目前绝大多数的模型车都采用了齿轮+皮带传动的形式,简单、轻便、传动阻力小,缺点是维护、安装稍嫌麻烦。
也有的模型车产品采用真车的直轴+伞齿式传动方式,优点是传递扭矩大,维护比较方便。
传动部分的灵活、顺畅十分重要,维护保养工作搞得好,能使你的赛车更快、更省电。
有时正在行驶的模型赛车可能突然发出一些异常的声音,这十有八九是传动部分发生了故障(齿轮间搅进了泥沙或皮带碰到了什么东西),你要马上将车停下来,认真地检修。
千万不能继续蛮干,那样只能使你得到更大的损失。
三、差速器差速器是汽车上的一个重要装置。
汽车转弯时,由于内外轮转弯半径不同,如果左右驱动轮的转速相等,将导致无法转向或横滑。
差速器的作用就是自动地吸收左右驱动轮的转速差,避免轮胎打滑及过多的磨损,使汽车圆滑地转弯。
模型车的差速器有齿轮式和滚珠式两种,齿轮式差速器又可分为伞齿轮式(贝格列尔式)和行星齿轮式两种,在构造上几乎与真车一模一样;滚珠式差速器结构简单(用若干钢珠和一对压力片代替差速器中的大小齿轮),实际使用效果不错。