干涉条纹图数字图像处理
白光干涉条纹测粗糙度的方法_概述说明以及解释
白光干涉条纹测粗糙度的方法概述说明以及解释1. 引言1.1 概述本文介绍了一种使用白光干涉条纹测量粗糙度的方法。
粗糙度是物体表面不规则度的度量,对于众多工程应用具有重要意义。
白光干涉条纹测量方法通过利用光的干涉现象来获取目标表面的粗糙度信息,具有非接触、快速、高精度等优势。
本文根据该方法的理论背景和实验原理进行了详细探讨,并描述了相关数据处理方法。
1.2 文章结构本文共分为五个部分:引言、白光干涉条纹测粗糙度方法、实验设计与步骤、结果与讨论以及结论。
首先在引言部分简要介绍了本文研究的背景和概况;其次,在第二部分中详细讨论了白光干涉条纹测量粗糙度的理论基础以及实验原理;接下来,在第三部分中列举了所用的实验材料和仪器,并描述了实验设计和操作步骤;然后,在第四部分中展示了实验结果并对其进行评估与讨论;最后在结论部分对本文的主要发现和观点进行总结,并展望未来的研究方向。
1.3 目的本文旨在介绍白光干涉条纹测量粗糙度的方法,向读者提供一种可行的测量手段。
通过对方法的概述说明和解释,读者可以深入了解该方法的原理和数据处理过程。
此外,本文还旨在探讨该方法的优势、适用范围和局限性,以及未来可能的改进方向。
通过阅读本文,读者将对白光干涉条纹测量粗糙度有一个全面而清晰的了解,为相关领域的研究和应用提供参考。
2. 白光干涉条纹测粗糙度方法2.1 理论背景白光干涉条纹测粗糙度方法是一种基于干涉现象的非接触式表面测量技术。
当白光照射到具有不同高度或粗糙性的物体表面时,会产生干涉条纹。
通过分析这些条纹,可以得出物体表面的粗糙度信息。
在白光干涉中,由于光的干涉现象,存在相位差引起的明暗交替条纹。
当两束入射光波经过不同路径传播后再次重合时,它们会发生相位差。
这种相位差会导致不同颜色的光被衍射出来,并形成明暗交替的条纹。
2.2 实验原理白光干涉条纹测粗糙度方法利用了两束单色连续谱波在空间上的相互作用。
首先,将一束平行光对准待测物体表面,并使其入射到反射镜上。
数字图像处理大作业
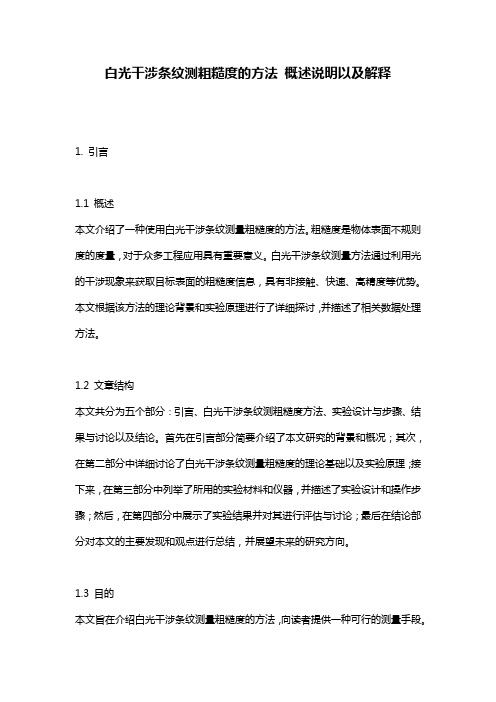
1、下图是一用于干涉原理进行测试的干涉场图像,要求判读条纹的间距,请给出图像处理的方案并说明每一步的作用及其对其它处理步骤可能产生的影响。
解:步骤与思路:○1.进行模糊处理,消除噪声○2.边缘检测,进行图像增强处理○3.二值化图像,再进行边缘检测,能够得到很清晰的边界。
○4.采用横向标号法,根据值为1像素在标号中的相邻位置可以确定间距I=imread('xz mjt.bmp');I1=medfilt2(I); %对图像中值滤波imshow(I1);[m,n]=size(I1);for i=1:mfor j=1:nif(I1(i,j)<100) %阈值为100I1(i,j)=255;elseI1(i,j)=0; %进行二值化endendendfigure;imshow(I1);Y1=zeros(1,25);y2=y1;c=y2;i=100;for j=1:1200if (I1(i,j)==255&&I1(i,j+1)==0)Y1=j+1;endif (I1(i,j)==0&&I1(i,j+1)==255)Y2=j;endendfor i=1:25c=Y2(i)-Y1(i)endc %找出每两个条纹之间的距离2. 现有8个待编码的符号m0,……,m7,它们的概率分别为0.11,0.02,0.08,0.04,0.39,0.05,0.06,0.25,利用哈夫曼编码求出这一组符号的编码并画出哈夫曼树。
3. 请以图像分割方法为主题,结合具体处理实例,采用期刊论文格式,撰写一篇小论文。
各种算子对图像进行边缘检测效果的研究图像分割是根据需要将图像划分为有意义的若干区域或部分的图像处理技术。
通过边缘检测在Matlab 中实现方法,及用四叉数分解函数进行区域分割的方法,掌握了Matlab 区域操作函数的使用和图像分析和理解的基本方法,并学到了'roberts','sobel','prewitt','canny','log'算子对图像进行边缘检测的不同效果。
云纹干涉法中干涉条纹的计算机自动识别研究

Ab ta t Diia ma ePr c s ig wa s d i a e i6i tre o tyme h d Th rt — sr c : gtlI g o e sn su e ls rmor ef r me r t o . n n ea ih
维普资讯
第2 4卷
第 4期
江
西
科
学
V o. 4 No 4 12 .
Au 2 06 g. 0
20 0 6年 8月
J ANGXI S ENCE I CI
文章 编 号 :O 1 3 7 (O 6O 一O 7 —O 1O — 6 92 O ) 4 1 O 5
Au o tc l r m h rn ePa tr n L s r M o r n e f r mer t ma ia l f o t e F i g te n i a e i6I tr e o ty y
Z ANG e - u YAN a — u H Ch n y , Ch o h a
云纹干涉法 中干涉条纹 的计算机 自动识别研究
张宸 宇 , 超 华 严
( 昌航 空工业学院测试技术与控制工程系 , 南 江西 南 昌 30 3) 3 0 4
摘要 : 将数 字 图像 处理 技 术 运 用 于 云 纹 干 涉 图 片 中干 涉条 纹 的 处理 , 先 通 过 去 噪 、 值 化操 作 , 后 通 过 细 首 二 然 化二 值 图 , 黑 色条 纹 细 化 成 条 纹 中间 的 单像 素散 点 , 用 Ho g 将 运 u h变换 将 散 点 拟 合 成 连 续 的 直 线 , 后 通 过 最 膨胀 , 直 线 中问 的“ 泡” 充 , 再 次运 用细 化 原 理 , 填 充 后 的 黑 色 条 纹 细 化 成 连 续 的 单 像 素 宽度 条 纹 , 将 气 填 并 将 通过 嫡制 相 关程 序 , 用计 算 机 成 功 的检 测 出图 片 中干 涉 条 纹 的数 目。 与 传 统 人 工 判 读 条 纹 数 目相 比 , 方 法 本
光的干涉和衍射现象解释和图像

光的干涉和衍射现象解释和图像光的干涉和衍射现象是光学领域中重要的现象,它们展示了光的波动性质。
本文将对光的干涉和衍射进行解释,并提供相关的图像来帮助读者更好地理解。
干涉是指两束或多束光波相互叠加形成明暗条纹的现象。
当两束或多束光波相位差匹配时,它们会相互加强,形成亮纹;而当相位差不匹配时,它们会相互抵消,形成暗纹。
干涉现象的解释可以用光的波动性来解释。
光波在传播过程中会相互干涉,即光波的电磁场的叠加效应。
这一现象是由于光波是一种横波,在传播过程中产生了波的叠加与相消。
图像1展示了一个干涉的光学装置,其中两束光波通过分光镜后被反射,然后重新叠加形成干涉条纹。
在图像中,明暗相间的纹理代表着光波的干涉效应。
根据相位差的大小不同,光波叠加时会形成明亮或暗淡的区域。
衍射是指光波遇到绕射体或经过狭缝时发生弯曲和扩散的现象。
当光波通过狭缝时,狭缝会起到一个光波的波阻挡作用,使光波发生弯曲和扩散。
衍射现象的解释同样基于光的波动性。
当光波通过一个大小与光的波长相当的狭缝时,光波的传播会发生弯曲。
这是由于光的波动性质的结果,波动性使得光的传播不仅限于直线传播,而是具有了扩散的特性。
图像2展示了光波通过一个狭缝后的衍射效应。
可以观察到,光波经过狭缝后发生了扩散和曲折,形成了扇形的衍射纹。
这些衍射纹的分布情况取决于光波的波长和狭缝的大小。
通过干涉和衍射现象,我们可以深入理解光的波动性质。
这不仅在实践中有重要的应用,例如干涉测量和衍射成像等,还能进一步推动光学领域的发展。
总结起来,光的干涉和衍射现象是光学领域中的重要现象,它们展示了光的波动性质。
干涉是指两束或多束光相互叠加形成明暗条纹的现象,衍射是指光通过狭缝或绕射体时发生弯曲和扩散的现象。
图像1展示了干涉装置的明暗条纹,图像2展示了光波通过狭缝后的衍射效应。
通过对这些现象的研究,我们能更深入地了解光的波动性质,并应用于实践中推动光学技术的发展。
数字图像处理 干涉条纹
《数字图像处理》
大作业报告提纲
题目:干涉条纹图像的处理方法
一、根据课本的内容,对图像噪声的定义、分类、频域和空域处理方法进行详细叙述。
二、图1是一幅干涉条纹图像,图中红色圆圈所示的区域为要进行处理的干涉条纹图案。
要求按如下步骤处理:
1)提取干涉条纹:图1中红圈内部为干涉条纹,提取出红圈内部的干涉条纹区域,红圈及圈外的区域中像素的光强可以全部赋值为0;将提取的干涉条纹图片画图显示出来。
2)提高信噪比:对所提取的干涉条纹区域进行噪声抑制处理,采用频域或空域处理算法进行噪声抑制处理;计算处理前后的图像信噪比,信噪比增加了说明处理有效果;
3)归一化处理:对所提取的干涉条纹,每一条亮线和暗线之间属于同一区域;条纹虽然亮暗变化,但条纹最亮的值并不一样。
我们需要对同一区域中的条纹灰度进行归一化处理,使亮条纹的峰值都为255灰度级,而暗条纹的谷值都为0灰度级,峰谷值之间的像素灰度进行同比例处理。
最后得到亮暗均匀的干涉条纹图片。
请给出图像处理的方案,具体matlab代码,中间结果和最终结果,并进行说明。
图1 干涉条纹。
数字散斑干涉(DSPI)研究的文献综述
数字散斑干涉振动测量技术研究进展摘要:数字散斑干涉技术(DSPI)是一种光学测试方法,具有非接触、高灵敏度、全场、实时、无损检测的特点,在振动测量方面有着较大的优势。
本文从图像处理、相移技术等方面阐述了数字散斑干涉振动测量的发展现状,并对其中的关键技术进行了比较和分析。
关键词:数字散斑干涉,振动测量,数字图像处理,相移技术Research Progress on V ibration Measurement Using Digital SpecklePattern InterferometryAbstract:Digital speckle pattern interferometry (DSPI) is an optical testing and measuring method,a non-contact, high-sensitivity, full-field, real-time, non-destructive one, which has an advantage in vibration analysis. This paper introduces the recent progress on DSPI vibration measurement from aspects of digital image processing and phase shifting, also compares and analyzes their key technologies.Keywords:Digital speckle pattern interferometry; Vibration measurement; Digital image processing; Phase shifting0 引言散斑计量技术是现代光测力学技术中的一种。
它具有非接触、无损、全场、高精度、实时测量的特点,在轮廓、应变、位移和振动测量方面有着广泛的应用前景[1]。
自准直仪原理

自准直仪原理自准直仪是一种用于测量和调整光学元件的仪器,它能够确保光学系统中的元件处于准确的位置和角度,以保证光路的精确性和稳定性。
自准直仪原理是指利用自准直仪进行光学元件的调整和校准所依据的基本原理和方法。
下面将详细介绍自准直仪的原理及其应用。
首先,自准直仪的原理是基于光学干涉的原理。
当自准直仪的测量光束与被测元件的表面相交时,会产生干涉条纹。
通过观察和分析这些干涉条纹的变化,可以确定光学元件的位置和角度是否准确,从而进行调整和校准。
其次,自准直仪原理还涉及到光学元件的反射和折射特性。
不同材料和表面状态的光学元件在光束的反射和折射过程中会产生不同的干涉效应,利用自准直仪可以对这些效应进行精确的测量和分析,从而实现光学元件的精确定位和角度调整。
另外,自准直仪原理还包括了光学系统的稳定性和环境因素的影响。
光学系统在不同的环境条件下会受到温度、湿度、气压等因素的影响,这些因素会导致光学元件的位置和角度发生变化。
自准直仪通过实时监测和反馈调整,可以对这些变化进行及时的补偿和修正,确保光学系统的稳定性和精度。
最后,自准直仪原理还涉及到数据处理和分析的方法。
通过对自准直仪采集到的干涉条纹图像进行数字化处理和分析,可以得到光学元件的位置和角度信息,进而进行自动化的调整和校准。
这些方法包括数字图像处理、信号处理、模式识别等技术,为自准直仪的精确度和效率提供了强大的支持。
综上所述,自准直仪原理是基于光学干涉、反射和折射特性、系统稳定性和数据处理分析等多方面的原理和方法。
通过对这些原理的深入理解和应用,可以实现光学元件的精确定位和角度调整,保证光学系统的精确性和稳定性,为光学测量和调整提供了重要的技术支持。
光的干涉图案与绘制方法

光的干涉图案与绘制方法光的干涉是光学中一个重要的现象,它揭示了光波的波动性质。
干涉现象是指两个或多个光波相互叠加时所产生的干涉图案。
这些图案可以通过一些特定的方法来绘制和观察。
干涉图案的绘制方法之一是杨氏双缝干涉。
这是一种经典的干涉实验,它由英国物理学家杨振宁于1801年首次提出。
杨氏双缝干涉实验使用一个光源照射到一个屏幕上,屏幕上有两个非常接近的小孔,光通过这两个小孔后会形成一系列明暗相间的条纹。
这些条纹是由两个光波相互干涉所形成的,它们的干涉效应导致光的强度在某些区域增强,而在其他区域减弱。
另一种常见的干涉图案是牛顿环。
这是由英国物理学家艾萨克·牛顿于1665年发现的。
牛顿环实验使用一个透明的凸透镜和一个平面玻璃片,当它们接触在一起时,会在接触面上形成一系列的彩色环。
这些彩色环是由光的干涉所导致的,不同颜色的环代表了不同波长的光波在干涉过程中的相位差。
除了杨氏双缝和牛顿环,还有许多其他的干涉图案可以绘制。
例如,菲涅尔双棱镜干涉实验可以通过将光波通过两个相邻的棱镜来观察干涉图案。
这个实验可以产生一系列明暗相间的条纹,这些条纹的间距和形状取决于入射光的波长和棱镜的几何形状。
绘制干涉图案的方法也可以通过使用干涉仪来实现。
干涉仪是一种专门用于观察光的干涉现象的仪器。
它通常由一个光源、一个分束器、一组反射镜和一个接收屏组成。
光从光源发出后,经过分束器分成两束,然后经过一系列的反射和折射,最后在接收屏上形成干涉图案。
通过调整干涉仪的各个部分,可以改变干涉图案的形状和间距。
在绘制干涉图案时,需要注意一些细节。
首先,光源的选择非常重要。
理想的光源应该是单色的,这样可以确保干涉图案的清晰度。
其次,光的传播路径应该是稳定的,避免外界的震动和干扰。
最后,观察干涉图案时,需要使用适当的仪器和技术,例如使用显微镜来放大图案,或者使用摄像机来记录图案。
总之,光的干涉图案是光学中一个重要的现象,它揭示了光波的波动性质。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
干涉条纹图的数字图像处理
滤波
由于CCD 拍摄的图像中存在很大的噪声,滤除噪声的干扰对后期的处理相当重要。
由于噪声的多样性,本文采用W iener 自适应滤波【】,W iener 自适应滤波根据图像的局部方差来调整滤波器的输出。
当局部方差大时,滤波器平滑效果强。
对灰度图中的每一个像素点()j i f ,, W iener 滤波器采用的算法首先估计出像素的局部矩阵μ和方差2σ:
()∑∈=ημj i j i f MN ,,1
(1)
()2,22,1μση-=∑∈j i j i f MN (2)
η是图像中每个像素的N M ⨯的邻域。
个像素利用W iene 旎波器估计出其灰度值:
()()()μσ
νσμ--+=j i f j i b ,,222 (3) 式中:2ν是图像中噪声的方差。
细化处理
对滤波后的图像先进行二值化,并对二值化的干涉条纹进行细化处理【】。
干涉条纹的细化难点在于解决骨架的抽取,防止断点出现和剔除毛刺。
基于以上的考虑,本文利用数学形态学【】中的零交叉细化法来进行图像的细化。
其优点是对条纹的平滑和骨架抽取同时进行,并且可以有效地防止分支和解决易产生断点的问题,其算法如下。
图1所示为图像中的一个3x3区域,各点标记名称为
9321,,,,P P P P ⋅⋅⋅,
,其中1P 位于中心,若11=P (即黑点),下而4个条件如果同时满足,则删除()011=P P 。
()()()()⎪⎪⎩⎪⎪⎨⎧≠=⨯⨯≠=⨯⨯=≤≤10Z 01001062464228
4211P P P P P Z P P P P Z P NZ 或者或者 (4)
图1图像区域
根据上而的算法,对图像中的每一点重复这一步骤,直到所有的
点都不可删除为止,图像便可得到细化。
13亚像素边缘检测
对细化后的图像利用Zemike 正交矩【】对边缘进行亚像素定位。
Zemike 矩是积分型算子,对噪声不敏感,建立理想的阶跃边缘模型如图2所示。
图2理想阶跃边缘模型
图2中:b 为单位圆内的背景灰度、h 为阶跃高度,;L 为边缘上的直线,;a 为圆盘中心到边缘的垂直距离,’e 为边缘与x 轴所成的角度。
Zemike 矩的多项式定义为
()θθρin nm nm e R V =, (5)
式中:nm R 是Zemike 矩的正交多项式。
图像()y x f ,的二维Zemike 矩在的条件下可表示为
()()θρ,,*nm x y
nm V y x f Z ∑∑= ( 6)
对于一幅大小N N ⨯的数字离散化二维图像的Zem ike 矩可以表示为
()()()y x V y x f N n A nm
N x N
y nm ,,11112∑∑==-+=π (7) 亚像素边缘检测公式中只用了00A ,11A ,20A ,它们对应的积分核函数
分别为100=V ,jy x V +=11,1222220++=y x V 。
图像旋转前后00A ,11A ,20A 关系式可以表达为0000'A A =,θj e A A 1111'=,2020'A A =。
对于图像中的每一个像
素点计算出其边缘参数d ,h ,b ,θ。
取阶跃灰度阂值τ和距离δ进行阂值处理,当τ≥11A ,21=≤δd 时,被检测的点即为亚像素边缘点。
亚像素边缘检测公式可以表达为⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=⎥⎦⎤
⎢⎣⎡θ
θsin cos d y x y x s s 。
14应用最小二乘法拟合激光干涉条纹中心及半径
根据最小二乘原理[]圆拟合方法来拟合激光干涉条纹的轮廓。
圆心坐标为()b a ,,半径为r 的圆方程可表示为
()()222r b y a x =-+- (9)
令残差为
()()222r b y a x i i i --+-=ε (10)
式中:E i ∈,E 为所有边界的集合;()i i y x ,为图像边界点的坐标。
残差平方和函数为
()()[]
22222∑∑--+-==i i i i i r b y a x Q ε(11)
根据最小二乘原理,应有:
0=∂∂=∂∂=∂∂r
Q b Q a Q (12) 即:()()[]()()()()[]()()()()[]
()⎪⎪⎪⎩⎪⎪⎪⎨⎧=-•--+-=∂∂=--•--+-=∂∂=--•--+-=∂∂∑∑∑i i i i i i i i i i i r r b y a x r Q b y r b y a x b
Q a x r b y a x a Q 022022022222222222 (13)
N y x y x i n i m i n m ⎪⎭
⎫ ⎝⎛=∑ (14) 式中:N 表示图像的所有边界点个数。
由式(14)便可算出圆环参数a ,b ,r 为
由最小二乘原理圆拟合方法推导的激光干涉条纹中心及半径的检测算法虽然形式复杂,但仅对边界点循环一次就可计算出各参数,较为复杂的根方运算只是在计算出中心后求半径时计算一次,因此整个算法的计算速度将会很快。
2实验结果及分析
为了验证方法的有效性,本文进行了大量的验证试验,试验是在Pentnm 4 CPU 为3 00 GH 、内存为512MB 的计算机上进行的,编程语言为V isual C++ 6 0}
采用CCD 拍摄干涉条纹图像,经图像卡输入计算机,在屏幕上可显示放大的干涉条纹图像如图3a 所示,条纹的标准中心位置为(56,
84),单位为像素,图31)为滤波后的干涉条纹,可以明显看出,原图像噪声已经剔除,并得到了清晰的干涉条纹。
由于拍摄图像的边缘条纹不完整,灰度变化大,细化后很难保存完整的条纹,而中间条纹细化后保存完好,减少了分叉,得到了单像素的条纹,因此本文只处理0- 4级条纹。
利用最小二乘法拟合激光干涉条纹的中心及各级半径,对图像拟合100次取平均得到的结果如表1所示,算法运行时间如表2所示。
由表1可以看出,利用本文提出的方法来检测干,涉条纹的中心及半径,其中心像素误差低于0 5个像素,测量精度能够达到亚像素
级。
由表2可以看出算法所需时间平均在100ms以下,基本可以达到实时要求。
表1干涉条纹中心及半径测量结果。