干涉条纹图数字图像处理
白光干涉条纹测粗糙度的方法_概述说明以及解释
白光干涉条纹测粗糙度的方法概述说明以及解释1. 引言1.1 概述本文介绍了一种使用白光干涉条纹测量粗糙度的方法。
粗糙度是物体表面不规则度的度量,对于众多工程应用具有重要意义。
白光干涉条纹测量方法通过利用光的干涉现象来获取目标表面的粗糙度信息,具有非接触、快速、高精度等优势。
本文根据该方法的理论背景和实验原理进行了详细探讨,并描述了相关数据处理方法。
1.2 文章结构本文共分为五个部分:引言、白光干涉条纹测粗糙度方法、实验设计与步骤、结果与讨论以及结论。
首先在引言部分简要介绍了本文研究的背景和概况;其次,在第二部分中详细讨论了白光干涉条纹测量粗糙度的理论基础以及实验原理;接下来,在第三部分中列举了所用的实验材料和仪器,并描述了实验设计和操作步骤;然后,在第四部分中展示了实验结果并对其进行评估与讨论;最后在结论部分对本文的主要发现和观点进行总结,并展望未来的研究方向。
1.3 目的本文旨在介绍白光干涉条纹测量粗糙度的方法,向读者提供一种可行的测量手段。
通过对方法的概述说明和解释,读者可以深入了解该方法的原理和数据处理过程。
此外,本文还旨在探讨该方法的优势、适用范围和局限性,以及未来可能的改进方向。
通过阅读本文,读者将对白光干涉条纹测量粗糙度有一个全面而清晰的了解,为相关领域的研究和应用提供参考。
2. 白光干涉条纹测粗糙度方法2.1 理论背景白光干涉条纹测粗糙度方法是一种基于干涉现象的非接触式表面测量技术。
当白光照射到具有不同高度或粗糙性的物体表面时,会产生干涉条纹。
通过分析这些条纹,可以得出物体表面的粗糙度信息。
在白光干涉中,由于光的干涉现象,存在相位差引起的明暗交替条纹。
当两束入射光波经过不同路径传播后再次重合时,它们会发生相位差。
这种相位差会导致不同颜色的光被衍射出来,并形成明暗交替的条纹。
2.2 实验原理白光干涉条纹测粗糙度方法利用了两束单色连续谱波在空间上的相互作用。
首先,将一束平行光对准待测物体表面,并使其入射到反射镜上。
数字图像处理大作业
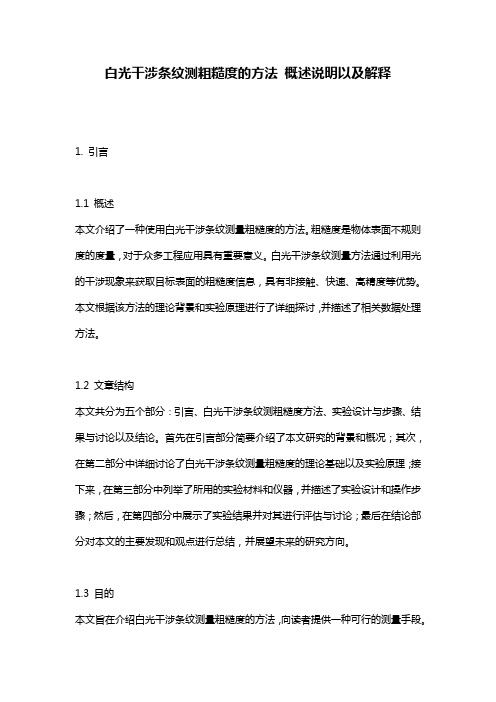
1、下图是一用于干涉原理进行测试的干涉场图像,要求判读条纹的间距,请给出图像处理的方案并说明每一步的作用及其对其它处理步骤可能产生的影响。
解:步骤与思路:○1.进行模糊处理,消除噪声○2.边缘检测,进行图像增强处理○3.二值化图像,再进行边缘检测,能够得到很清晰的边界。
○4.采用横向标号法,根据值为1像素在标号中的相邻位置可以确定间距I=imread('xz mjt.bmp');I1=medfilt2(I); %对图像中值滤波imshow(I1);[m,n]=size(I1);for i=1:mfor j=1:nif(I1(i,j)<100) %阈值为100I1(i,j)=255;elseI1(i,j)=0; %进行二值化endendendfigure;imshow(I1);Y1=zeros(1,25);y2=y1;c=y2;i=100;for j=1:1200if (I1(i,j)==255&&I1(i,j+1)==0)Y1=j+1;endif (I1(i,j)==0&&I1(i,j+1)==255)Y2=j;endendfor i=1:25c=Y2(i)-Y1(i)endc %找出每两个条纹之间的距离2. 现有8个待编码的符号m0,……,m7,它们的概率分别为0.11,0.02,0.08,0.04,0.39,0.05,0.06,0.25,利用哈夫曼编码求出这一组符号的编码并画出哈夫曼树。
3. 请以图像分割方法为主题,结合具体处理实例,采用期刊论文格式,撰写一篇小论文。
各种算子对图像进行边缘检测效果的研究图像分割是根据需要将图像划分为有意义的若干区域或部分的图像处理技术。
通过边缘检测在Matlab 中实现方法,及用四叉数分解函数进行区域分割的方法,掌握了Matlab 区域操作函数的使用和图像分析和理解的基本方法,并学到了'roberts','sobel','prewitt','canny','log'算子对图像进行边缘检测的不同效果。
压电陶瓷液体调相器的性能检测

光学 精密工程Optics and Precision Engineering第 29 卷 第 5 期2021年5月Vol. 29 No. 5May 2021文章编号 1004-924X( 2021)05-1052-07压电陶瓷液体调相器的性能检测梁忠诚*,尹睿,陈陶,吴陈斌(南京邮电大学电子与光学工程学院、微电子学院,江苏南京210000)摘要:光学综合孔径成像技术的关键是解决共相位问题,子孔径之间的相位失调会严重影响成像质量,工程上一般要求 调相精度达到光波段久/10。
本文采用压电陶瓷制备一种液体调相器,利用干涉法和数字图像处理技术实现对调相器相位的高精度检测。
通过向压电陶瓷腔注入液体来制备调相器,利用干涉仪获得压电陶瓷液体调相器在不同电压下的干涉条纹并使用CCD 记录,最后对这些干涉条纹图像进行数字图像处理,得到单个像素的条纹骨架,采用条纹标记法跟踪不同电压下骨架条纹的移动情况,并计算骨架条纹的像素移动量。
实验结果表明,在0~30 V 的电压下,压电陶瓷液体调相器的调相范围为0~3.325n ,调节精度可以达到A /40,并且在电压区间内调相的线性度良好,满足光学综合孔径中 单个子镜的相位调制精度要求。
关 键 词:综合孔径成像;压电陶瓷;液体调相器;数字图像处理;相位检测中图分类号:TN256;TP751. 2文献标识码:Adoi :10. 37188/OPE. 20212905. 1052Performance test of piezoelectric ceramic liquid phase modulatorLIANG Zhong -cheng * , YIN Rui , CHEN Tao , WU Chen -bin(College of E lectronic and Optical Engineering & College of M icroelectronics , Nanjing University ofPosts and Telecommunications , Nanjing 210000, China )* Corresponding author , E -mail : zcliang@njupt. edu. cnAbstract : The key of optical synthetic aperture imaging is to solve the problem of common phase. Thephase imbalance between sub apertures will seriously affect the imaging quality. Generally , the phase mod ulation accuracy of 1/10 wavelength in optical band is required in engineering. In this paper , a liquid phasemodulator was fabricated by piezoelectric ceramics. The phase of the liquid phase modulator was detectedwith high precision by using interference method and digital image processing technology . The phase mod ulator was prepared by injecting liquid into the piezoelectric ceramic cavity. The interference fringes of the piezoelectric ceramic liquid phase modulator under different voltages were obtained by using the interferom eter and recorded by CCD. Finally , a series of digital image processing were performed to obtain thefringe skeleton of a single pixel. The fringe marking method was used to track the movement of the skele ton fringe under different voltages. The pixel movement of skeleton stripe was calculated. The experimen tal results show that the phase modulation range of the piezoelectric ceramic liquid phase modulator is 03. 325n under 0-30 V voltage , and the adjustment accuracy can reach 1/40 wavelength. The phase modu-收稿日期:2020-07-31;修订日期:2020-09-01.基金项目:国家自然科学基金资助项目(No. 61775102)第5期梁忠诚,等:压电陶瓷液体调相器的性能检测1053lation linearity is good in the voltage range,which meets the phase modulation accuracy requirements of single sub mirror in optical synthetic aperture.Key words:synthetic aperture imaging;piezoelectric ceramics;liquid phase modulator;digital image pro-cessing;phase detection1引言光学综合孔径成像技术是指利用多个小孔径望远镜排列成一定形式的稀疏孔径阵列对物体成像,将观测结果进行综合处理,使最终结果等效于一个大孔径望远镜对该物体的观测结果。
数字图像处理 干涉条纹
《数字图像处理》
大作业报告提纲
题目:干涉条纹图像的处理方法
一、根据课本的内容,对图像噪声的定义、分类、频域和空域处理方法进行详细叙述。
二、图1是一幅干涉条纹图像,图中红色圆圈所示的区域为要进行处理的干涉条纹图案。
要求按如下步骤处理:
1)提取干涉条纹:图1中红圈内部为干涉条纹,提取出红圈内部的干涉条纹区域,红圈及圈外的区域中像素的光强可以全部赋值为0;将提取的干涉条纹图片画图显示出来。
2)提高信噪比:对所提取的干涉条纹区域进行噪声抑制处理,采用频域或空域处理算法进行噪声抑制处理;计算处理前后的图像信噪比,信噪比增加了说明处理有效果;
3)归一化处理:对所提取的干涉条纹,每一条亮线和暗线之间属于同一区域;条纹虽然亮暗变化,但条纹最亮的值并不一样。
我们需要对同一区域中的条纹灰度进行归一化处理,使亮条纹的峰值都为255灰度级,而暗条纹的谷值都为0灰度级,峰谷值之间的像素灰度进行同比例处理。
最后得到亮暗均匀的干涉条纹图片。
请给出图像处理的方案,具体matlab代码,中间结果和最终结果,并进行说明。
图1 干涉条纹。
数字散斑干涉(DSPI)研究的文献综述
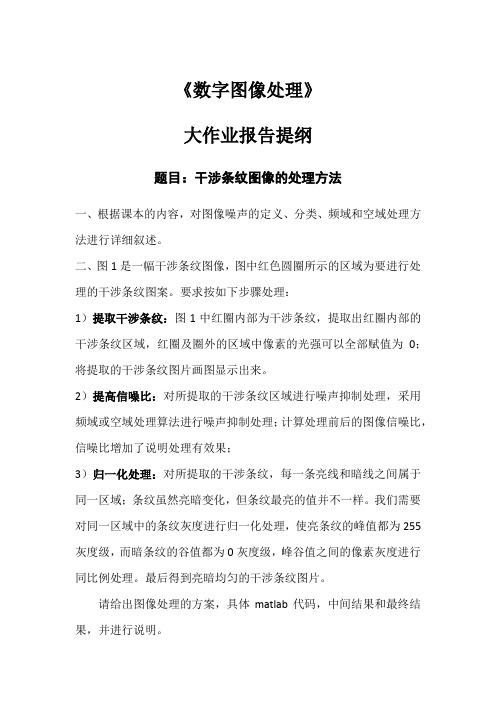
数字散斑干涉振动测量技术研究进展摘要:数字散斑干涉技术(DSPI)是一种光学测试方法,具有非接触、高灵敏度、全场、实时、无损检测的特点,在振动测量方面有着较大的优势。
本文从图像处理、相移技术等方面阐述了数字散斑干涉振动测量的发展现状,并对其中的关键技术进行了比较和分析。
关键词:数字散斑干涉,振动测量,数字图像处理,相移技术Research Progress on V ibration Measurement Using Digital SpecklePattern InterferometryAbstract:Digital speckle pattern interferometry (DSPI) is an optical testing and measuring method,a non-contact, high-sensitivity, full-field, real-time, non-destructive one, which has an advantage in vibration analysis. This paper introduces the recent progress on DSPI vibration measurement from aspects of digital image processing and phase shifting, also compares and analyzes their key technologies.Keywords:Digital speckle pattern interferometry; Vibration measurement; Digital image processing; Phase shifting0 引言散斑计量技术是现代光测力学技术中的一种。
它具有非接触、无损、全场、高精度、实时测量的特点,在轮廓、应变、位移和振动测量方面有着广泛的应用前景[1]。
全光纤马赫-曾德尔干涉仪的测温实验
全光纤马赫-曾德尔干涉仪的测温实验张亚星;赵鹏;张洁;苗明川【摘要】阐述了全光纤马赫-曾德尔干涉仪的测温原理,并在20~40 ℃对测温系统进行了标定.利用Matlab数字图像处理技术对温度干涉条纹图像进行处理,设计了计算条纹移动数目的程序.通过测温实验对条纹记数程序进行了检验,有较好的准确度.【期刊名称】《物理实验》【年(卷),期】2010(030)009【总页数】4页(P43-46)【关键词】马赫-曾德尔干涉仪;温度测量;Matlab;数字图像处理【作者】张亚星;赵鹏;张洁;苗明川【作者单位】北京航空航天大学,物理科学与核能工程学院,北京,100191;北京航空航天大学,物理科学与核能工程学院,北京,100191;北京航空航天大学,物理科学与核能工程学院,北京,100191;北京航空航天大学,物理科学与核能工程学院,北京,100191【正文语种】中文【中图分类】O436.1;TP212.11随着光纤技术的广泛应用,光纤传感技术得到迅速发展.相比传统的机电传感,光纤传感具有抗电磁干扰、耐腐蚀、重量轻、体积小、在易燃易爆的环境下安全可靠等优点,在微位移及振动测量、电信号测量、声传感等领域有着广泛的研究[1-4].光纤温度传感是光纤传感技术的重要应用,其中基于全光纤马赫-曾德尔干涉仪的温度测量具有精度高、制作成本低和易于调整等特点,具有广泛的应用价值.对马赫-曾德尔干涉场的测量有2种方法:一是使用光功率计探测空间光场的变化[5],该方法需要较繁杂的后续信号处理系统,成本较高;二是利用数字图像处理技术[6]或者人眼观测[7]直接对干涉条纹的移动进行分析,该方法大大降低了系统成本,且能够更加直观地观测到温度变化对干涉条纹的影响.本文基于后者,运用CCD摄像采集干涉条纹图像,通过Matlab数字图像处理技术对图像进行处理,分析条纹移动的数目和方向,编写条纹移动计数的程序,实现对温度的测量.将650 nm,2 mW的氦氖激光经分束镜分成2束,分别通过光纤耦合器进入2路单模石英光纤中.一路光纤经过半导体温控仪,另一路光纤保持恒温,如图1所示.在光纤的末端,2束相干激光汇聚,叠加产生干涉.干涉条纹由CCD采集,并送往计算机进行处理(采集速率为每秒25幅图像),形成BMP格式的图像文件.温度变化时,干涉条纹将随之发生移动,通过数字图像处理技术可得到干涉条纹移动的数目及移动方向,从而计算出温度升高或降低的值.干涉条纹移动数目与温度变化值之间有确定的线性关系.设光纤中2束激光光强分别为I1和I2,根据光的干涉原理,合成光的强度为其中Δ Φ为2束激光的相位差,Δ Φ等于2kπ时为亮条纹,Δ Φ等于(2k+1)π时为暗条纹(k为级数).设Φ1和Φ2分别为2束激光射出光纤时的相位(Φ1受温度调制):Φ1=Φ10+k0nL1,Φ2= Φ20+k0nL2,Δ Φ=Φ1-Φ2.其中Φ10,Φ20分别为2束相干激光耦合进入光纤时的初相位,L1和L2为光纤的长度,k0为激光在真空中的波矢大小,n为光纤的折射率.将Φ1对温度T求全微分,且等式两边同除以L1,得: (2)式右边表示单位温度变化下光纤折射率的变化量),在一定的温度范围内它们均为常量[5],因此对于确定的k0,n和L1,(2)式为一常量,即Φ1随温度线性变化.另一路光纤保持恒温,Φ不变,有2至此得出Δ Φ也随温度线性变化,即条纹移动数目与温度变化值之间有确定的线性关系.通过温度的标定,可确定该线性关系的具体数值.干涉条纹移动方向(左、右)和温度升降之间的关系与两光纤末端的左右放置有关,实验中,温度降低时,条纹右移;温度升高时,条纹左移.计算出条纹的净移动数,结合标定结果,可判断温度升高或降低的数值.以温控仪温度为标准温度,从20~40℃,温度每变化1℃,记录相应的条纹净移动数目.以温度为横坐标x,条纹的累积移动数目为纵坐标y,设y=kx,使用最小二乘法进行一元线性回归.通过以下公式:计算得到比例系数k为9.6/℃,即温度每变化1℃,移动9.6根条纹.线性相关系数r 为0.998 7.一元线性回归结果如图2所示.为了测量一段时间内温度的变化,需要持续采集这段时间内的干涉条纹图像.对采集来的所有图像运用Matlab IPT函数进行处理.某幅图像的处理结果如图3所示. 具体处理步骤如下:1)读入干涉条纹图像,如图3(a)所示.2)将干涉条纹旋转至竖直方向,提取较清晰的部分图像,如图3(b)所示.3)低通滤波,使图像平滑,如图3(c)所示.4)进行二值化处理,使亮条纹变为白色(灰度值为1),暗条纹变为黑色(灰度值为0),如图3 (d)所示.5)对二值化图像进行边缘处理,突出暗条纹的边缘,形成边缘检测图像.如图3(e)中的白线对应于图3(d)中暗条纹的边缘.在进行上述处理后,每幅干涉图像都有其相应的二值化图像[图3(d)]和边缘检测图像[图3 (e)],通过分析多幅二值化图像和边缘检测图像,可以分别判断条纹移动数目及方向.首先,根据某一点所在处条纹的亮暗变化情况可以判断条纹是否发生移动.在多幅干涉图像[图3(d)]中提取同一指定点(x0,y0)的灰度值,按照图像采集的先后顺序将该值保存在同一数组a中.若a(i+1)≠a(i),则该点处条纹明暗情况发生了1次变化,即从第i幅图像到第i+1幅图像,移动了1根条纹,其中i为干涉图像的幅数.其次,因为图像采集的速度相比条纹移动速度足够快,所以如果对图3(e)中所有白线进行标记,可以认为在前一张图像中距某点最近的那根白线在下一张图像中仍然距该点最近,因此通过跟踪这条特殊的白线,可以判断条纹的移动方向,白线的移动方向与条纹的移动方向一致.判断方法是:在所有图3(e)中找到离上述指定点(x0,y0)最近的白线,记录下白线所在处的水平坐标,同样按照图像采集的先后顺序保存在另一个数组b中.在a(i+1)≠a(i)的前提下,若b(i+1)>b(i),表明该白线向右移动了,即条纹整体向右移动了1根,反之则条纹整体向左移动了1根.对i进行循环,在a(i+1)≠a(i)的前提下,比较b(i+1)和b(i)的大小,可以统计出条纹向右移动的根数和向左移动的根数,两者相减,若差为正,则温度降低;反之温度升高,差的绝对值为条纹的净移动数目.使用条纹计数程序进行温度测量实验.温控仪温度从26.9℃上升至29.4℃,即温度升高了2.5℃.在这段时间内以每秒25幅的速度连续采集了904幅576×768大小的BMP格式图像.编写image_process函数实现对图像从滤波到边缘检测的前期处理,编写image_analyze函数实现移动条纹的计数和方向判断.Matlab程序流程如下:由于条纹移动方向为左移,判断温度为升高,根据shift_No=kΔT=9.6ΔT,得温度升高ΔT=2.6℃,与实际温度升高2.5℃较为接近,说明该条纹计数程序可以较准确地判断条纹移动方向,并计算条纹净移动数目,从而测量出温度的变化,条纹计数的准确性依赖于干涉图像的质量[8].温度测量实验结果如下:条纹净移动数25根,温度变化测量值2.6℃,温控仪温度变化2.5℃,相对偏差3.6%.本文基于全光纤马赫-曾德尔干涉仪,运用Matlab数字图像处理技术,实现了温度的测量,具有较好的准确度.对基于马赫-曾德尔干涉的温度测量进行了有益的尝试,实验结果表明基于全光纤马赫-曾德尔干涉并结合图像处理技术的温度测量具有其可行性,有较好的准确度,可以在光纤实验[9]中进行应用.通过本实验可使学生们得到较为全面系统的实验技能训练,本实验具有较好的实验教学和实用价值.【相关文献】[1] 贾亚民,杨拴科,朱钧.基于强度补偿式光纤传感器测金属线胀系数[J].物理实验,2008,28(10):1-4.[2] 王晓颖,李武军.等芯径等间距三光纤补偿式位移传感器的实验研究[J].物理实验,2008,28(3):32-35.[3] 刘京诚,任小宇,陈晓强,等.光纤F-P电流传感器[J].传感器与微系统,2009,28(9):73-74.[4] 李瑞,肖文,姚东,等.光纤声传感器的实验系统研究[J].光电工程,2009,36(6):131-134.[5] 王济民,奥诚喜.双光纤温度传感器的研究[J].西北大学学报,2006,36(1):55-58.[6] 王海潼,袁俊飞,刘姣姣.光纤温度传感器的设计与实现[J].电子测量技术,2007,30(2):68-71.[7] 周哲海,巫建坤.基于全光纤Mach-Zehnder干涉仪的温度测量系统[J].传感器与微系统,2006,25 (10):67-69.[8] 尚玉峰,吴重庆,刘海涛,等.对光纤Mach-Zehnder干涉仪的干涉场研究[J].北方交通大学学报, 2002,26(3):63-65.[9] 张权,朱玲,孙晴,等.光纤干涉系列实验教学的探索与实践[J].物理实验,2009,29(1):21-23.。
基于牛顿环-曲率半径计算的CCD数字图像测量软件设计及应用
基于牛顿环-曲率半径计算的CCD数字图像测量软件设计及应用张建兵;仝虎【摘要】根据CCD数字图像处理技术,利用Delphi6设计出一种实用的数字图像测量软件,将此测量软件应用在等厚干涉-牛顿环实验中,通过CCD成像可以获取清晰的等厚干涉条纹-牛顿环图像,将此测量软件经过长度定标后,可以方便快捷的测量出第n级(或第m级)干涉条纹的直径D(或半径r),通过计算机测量计算的牛顿环曲率半径R误差远小于传统测量方法.【期刊名称】《实验室科学》【年(卷),期】2010(013)004【总页数】4页(P126-129)【关键词】CCD;Delphi6;数字图像;牛顿环;干涉条纹;曲率半径【作者】张建兵;仝虎【作者单位】南京航空航天大学金城学院实验中心,江苏,南京,211156;南京航空航天大学金城学院实验中心,江苏,南京,211156【正文语种】中文【中图分类】O433随着计算机技术的日益发展,图像处理技术的日益完善,由于其具有很强的灵活度、较高的精度、较好再现性并且可以随时调整,而深入各个领域,例如在航空遥感、医用图像处理和工业领域中的应用等[1-3]。
如果将数字图像技术应用大学物理实验一些微细测量过程中,则可以大大降低操作者的操作强度。
并且,由于其具有较高的测量精度,大大减小了在实验过程中的实验误差。
等厚干涉 -牛顿环实验是大学物理实验中用来观察和研究光的干涉现象的经典实验,目前,多数高校学生都采用钠光灯作为单色光源,通过单色光照射牛顿环装置,利用测量显微镜观察牛顿环,测出各级牛顿环的直径或半径,利用已知光波波长来测定牛顿环平凸透镜的曲率半径。
学生在做此实验的过程中往往都需要眼睛紧紧盯着显微镜目镜仔细观察,同时还需要移动牛顿环装置和调焦手轮,寻找最清晰的干涉条纹并移动到最佳观察位置,容易造成操作者视力疲劳,读数出现误差,影响测量结果;同时,在实验操作测量过程中显微镜读数鼓轮有的回程误差等对计算结果都有较大影响。
角秒级小角度测量莫尔条纹两平面镜多次反射法法布里-珀罗干涉数字图像处理论文

角秒级小角度测量技术及其在航天器中的应用研究【摘要】小角度是航天测量的重要参数之一。
传统的测角方案难以满足航天技术对精度及轻小化等方面的需求。
本文针对航天测量中如下所述三方面的需求,提出角秒量级三维角度测量新方法:1.针对测量卫星载荷的变形及安装位置的微小变化的需求,采用莫尔条纹与自准直结合的原理,提出正交组合光栅和数字图像处理技术实现俯仰角与偏航角的角秒级测量方案;采用Talbot自成像原理,利用莫尔条纹实现滚动角的角秒级测量方案;验证实验结果表明:本文的测量方法对俯仰角与偏航角的测量精度为0.3’’,滚动角的测量误差不大于±1 ’’,测量范围为±30’。
2.针对测量卫星桁架上有效载荷相对于基准的小角度偏转需求,基于激光在两镜间多次反射角放大原理,利用CCD相机实时监测光斑位置变化,实现俯仰角与偏航角的亚角秒级测量;验证实验结果表明:反射次数为七次时,其测量精度为0.1’’,测量范围为340’’。
用菲涅耳双棱镜取代自准直测角中的平面反射镜,采用通过CCD相机探测返回两个光斑的位置变化,实现三维小角度测量。
3.针对测量航天器部件之间的相对角位移、微振动以及光束精确瞄准等需求,采用法布里-珀罗干涉原理实现小角度测量;仿真验证了所提方法的可... 更多还原【Abstract】 The small angle measurement method with high accuracy plays an important role in the high accuracy measurement field. The traditional methods can’t meet the aerospace need. In order to meet the demand for high accuracy and three-dimensional small angle measurement in different environment of the aerospace technology, the angle measurement schemes were explored and studied.1) In order to measure the deformation and attitude of the detector in the satellite, combining moiréfringe principle and sel... 更多还原【关键词】角秒级;小角度测量;莫尔条纹;两平面镜多次反射法;法布里-珀罗干涉;数字图像处理;【Key words】arc-second level;small angle measurement;Moir éfringe;multiple reflections between two mirrors;Fabry-Perot interferometer;digital image processing;【索购硕士论文全文】Q联系Q:138113721 139938848 即付即发目录摘要9-10ABSTRACT 10第一章概述12-171.1 小角度测量技术12-141.2 国内外发展概况14-161.3 课题的研究背景161.4 研究内容及研究方法16-17第二章图像法处理角度测量数据的理论基础17-282.1 图像法数据处理的基础17-182.2 激光光斑的提取与质心定位18-232.2.1 质心法19-202.2.2 加权质心法202.2.3 Hough 变换法20-212.2.4 圆拟合法21-222.2.5 实例22-232.3 莫尔条纹图像的处理23-262.3.1 莫尔条纹的预处理24-252.3.2 基于Hough 变换的直线提取算法252.3.3 实例25-262.4 本章小结26-28第三章莫尔条纹测角法28-373.1 莫尔条纹二维测角法28-323.1.1 莫尔条纹概述28-303.1.2 基于莫尔条纹的二维测角原理30-323.2 莫尔条纹三维测角法32-343.2.1 基于Talbot 自成像测滚动角原理32-333.2.2 基于莫尔条纹的三维测角原理33-343.3 莫尔条纹测角实验34-363.3.1 验证实验与数据处理34-353.3.2 误差分析35-363.4 本章小结36-37第四章反射式测角法37-544.1 两镜多次反射测角原理37-404.1.1 多次反射的二维测角原理37-394.1.2 测量动态范围分析39-404.2 菲涅耳双棱镜自准直三维测角原理40-444.2.1 坐标旋转变换的矩阵原理40-414.2.2 双棱镜测角光路图41-424.2.3 三维角度求解原理42-444.3 两镜多次反射测角实验44-534.3.1 测角实验装置与结果处理44-464.3.2 误差分析46-484.3.3 光斑位移测量实验48-514.3.4 改进与应用51-534.4 本章小结53-54第五章透射式测角法54-635.1 法布里-珀罗干涉度测角法54-575.1.1 法布里-珀罗干涉原理54-565.1.2 法布里-珀罗干涉测角方法56-575.2 法布里-珀罗干涉测角仿真实验57-585.2.1 原理及光路图57-585.2.2 仿真数据585.3 基于光学内反射小角度测量58-625.3.1 光学内反射测角法原理59-615.3.2 基于光学内反射的差动法测角装置61-625.3.3 光学内反射测角法的特点625.4 本章小结62-63结束语63-65致谢65-66参考文献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
干涉条纹图的数字图像处理 滤波
由于CCD 拍摄的图像中存在很大的噪声,滤除噪声的干扰对后期的处理相当重要。
由于噪声的多样性,本文采用W iener 自适应滤波【】,W iener 自适应滤波根据图像的局部方差来调整滤波器的输出。
当局部方差大时,滤波器平滑效果强。
对灰度图中的每一个像素点()j i f ,, W iener 滤波器采用的算法首先估计出像素的局部矩阵μ和方差2σ: ()∑∈
=
ημj i j i f MN
,,1
(1)
()2
,2
2,1μ
ση-=
∑∈
j i j i f MN
(2)
η是图像中每个像素的N M ⨯的邻域。
个像素利用W iene 旎波器估计出其灰度值:
()()()μσ
νσμ--+=j i f j i b ,,2
2
2 (3) 式中:2ν是图像中噪声的方差。
细化处理
对滤波后的图像先进行二值化,并对二值化的干涉条纹进行细化处理【】。
干涉条纹的细化难点在于解决骨架的抽取,防止断点出现和剔除毛刺。
基于以上的考虑,本文利用数学形态学【】中的零交叉细化法来进行图像的细化。
其优点是对条纹的平滑和骨架抽取同时进行,并且可以有效地防止分支和解决易产生断点的问题,其算法如下。
图1所示为图像中的一个3x3区域,各点标记名称为
9321,,,,P P P P ⋅⋅⋅,
,其中1P 位于中心,若11=P (即黑点),下而4个条件如果同时满足,则删除()011=P P 。
()()()()⎪⎪⎩⎪⎪⎨⎧≠=⨯⨯≠=⨯⨯=≤≤1
0Z 0100106
2464228
4211P P P P P Z P P P P Z P NZ 或者或者 (4)
图1图像区域
根据上而的算法,对图像中的每一点重复这一步骤,直到所有的点都不可删除为止,图像便可得到细化。
13亚像素边缘检测
对细化后的图像利用Zemike 正交矩【】对边缘进行亚像素定位。
Zemike 矩是积分型算子,对噪声不敏感,建立理想的阶跃边缘模型如图2所示。
图2理想阶跃边缘模型
图2中:b 为单位圆内的背景灰度、h 为阶跃高度,;L 为边缘上的
直线,;a 为圆盘中心到边缘的垂直距离,’e 为边缘与x 轴所成的角度。
Zemike 矩的多项式定义为
()θθρin nm nm e R V =, (5) 式中:nm R 是Zemike 矩的正交多项式。
图像()y x f ,的二维Zemike 矩在的条件下可表示为 ()()θρ,,*nm x
y
nm V y x f Z ∑∑= ( 6)
对于一幅大小N N ⨯的数字离散化二维图像的Zem ike 矩可以表示为
()()()y x V y x f N n A nm
N x N
y nm
,,11
11
2
∑∑==-+=
π (7)
亚像素边缘检测公式中只用了00A ,11A ,20A ,它们对应的积分核函数分别为100=V ,jy x V +=11,1222220++=y x V 。
图像旋转前后00A ,11A ,20A 关系式可以表达为0000'A A =,θj e A A 1111'=,2020'A A =。
对于图像中的每一个像素点计算出其边缘参数d ,h ,b ,θ。
取阶跃灰度阂值τ和距离δ进行阂值处理,当τ≥11A ,2
1
=≤δd 时,被检测的点即为亚像素边缘点。
亚像素边缘检测公式可以表达为⎥⎦
⎤⎢⎣
⎡+⎥⎦
⎤⎢⎣⎡=⎥⎦
⎤⎢⎣⎡θθsin cos d y x y x s s 。
14应用最小二乘法拟合激光干涉条纹中心及半径
根据最小二乘原理[]圆拟合方法来拟合激光干涉条纹的轮廓。
圆心坐标为()b a ,,半径为r 的圆方程可表示为 ()()222r b y a x =-+- (9) 令残差为
()()222r b y a x i i i --+-=ε (10)
式中
:E i ∈,E 为所有边界的集合;()i i y x ,为图像边界点的坐标。
残差平方和函数为
()()[]
2
2222∑∑--+-==i
i i i
i r b y a x Q ε(11)
根据最小二乘原理,应有:
0=∂∂=∂∂=∂∂r
Q
b Q a Q (12) 即:()()[]()()()()[]
()()()()[]
()⎪⎪⎪⎩⎪⎪⎪⎨⎧=-•--+-=∂∂=--•--+-=∂∂=--•--+-=∂∂∑∑∑i i i i i i i i
i i i r r b y a x r
Q b y r b y a x b
Q
a x r
b y a x a
Q 0
220220222222222
22 (13)
N y x y x i
n i m i n m ⎪⎭
⎫ ⎝
⎛=∑ (14)
式中:N 表示图像的所有边界点个数。
由式(14)便可算出圆环参数a ,b ,r 为
由最小二乘原理圆拟合方法推导的激光干涉条纹中心及半径的检测算法虽然形式复杂,但仅对边界点循环一次就可计算出各参数,
较为复杂的根方运算只是在计算出中心后求半径时计算一次,因此整个算法的计算速度将会很快。
2实验结果及分析
为了验证方法的有效性,本文进行了大量的验证试验,试验是在Pentnm 4 CPU为3 00 GH、内存为512MB的计算机上进行的,编程语言为V isual C++ 6 0}
采用CCD拍摄干涉条纹图像,经图像卡输入计算机,在屏幕上可显示放大的干涉条纹图像如图3a所示,条纹的标准中心位置为(56,84),单位为像素,图31)为滤波后的干涉条纹,可以明显看出,原图像噪声已经剔除,并得到了清晰的干涉条纹。
由于拍摄图像的边缘条纹不完整,灰度变化大,细化后很难保存完整的条纹,而中间条纹细化后保存完好,减少了分叉,得到了单像素的条纹,因此本文只处理0- 4级条纹。
利用最小二乘法拟合激光干涉条纹的中心及各级半径,对图像拟合100次取平均得到的结果如表1所示,算法运行时间如表2所示。
由表1可以看出,利用本文提出的方法来检测干,涉条纹的中心及半径,其中心像素误差低于0 5个像素,测量精度能够达到亚像素级。
由表2可以看出算法所需时间平均在100ms以下,基本可以达到实时要求。
表1干涉条纹中心及半径测量结果。