PLC在步进电机控制中的应用
PLC在步进电机控制中的应用

i i 一 h t: Z + fHi () 0 _ i COS( + v + Ui 蜀 ) ∑
.
,
∑ … ) ( f ( = I—一 f _ )
。
1 8 2×1 0 .5 00
Ls= Dp×C S O
l
2 Dp 2
P =.- i =
删 砭一
— — —
O0 O
3 脉冲产生指令 - - - -
辩c9 BI 2
I I
广
r—
I I
z S ¥ O 2j 3 -
\… 厂 一
II
L
r .
L
广 一 L
1 . r
图3
启动按钮
停止按钮
脱机按钮
P C L
L “
芷转控制
删
芷转3 周
麒啦 9
L -
1 1
s l z
l I
L
广 一
2 步进 电机 、步进驱动器 、 L 之间的连接 PC
步 进 电 机 是 一 种将 脉 冲信 号 转 换 成 直 线 位 移 或 角 位移 的 执 行 元件 。 进 电机 的 输 出 位 移 量 与输 入脉 冲 个 数成 正 比 , 步 其速 度 与脉 冲 频 率 成正 比 , 其转 向 与脉 冲 分 配 到 步 进 电机 的 各 相 绕 组 的 相 序
垫! !
: 垫
Sci ence an Techn o I nova on d ol gy n ti Her d al
工 程 技 术
PLC 在步 进 电机 控 制 中的应 用
刘 琛 森 ( 广西贺 州市 技工学校 广西贺 州 52 0 ) 4 8 0
PLC实现步进电机的正反转及调整控制

PLC实现步进电机的正反转及调整控制PLC是专门用于控制工程自动化系统的一种可编程逻辑控制器,其可以通过编程来实现对各种电气设备的控制。
在实际工程中,步进电机广泛应用于自动化设备中,如数控机床、包装机械、印刷设备等。
步进电机具有分辨率高、精度高、响应速度快等优点,因此被广泛应用于各种自动化控制系统中。
在PLC实现步进电机的正反转及调整控制中,需要考虑以下几个方面:1.步进电机驱动模块选型:步进电机需要配合驱动模块进行控制,通常采用的是脉冲信号驱动方式。
在PLC控制系统中,可以选择适合的驱动模块,如常见的2相、4相步进电机驱动模块。
2.步进电机控制程序设计:通过PLC软件编程,编写程序实现步进电机的正转、反转及调整控制功能。
在程序设计中,需要考虑步进电机的控制方式、驱动模块的接口信号、脉冲信号的频率等参数。
3.步进电机正反转控制:在程序设计中,通过PLC输出脉冲信号控制步进电机的正反转运动。
具体步骤包括设置脉冲信号的频率和方向,控制步进电机按设定的脉冲信号实现正反转运动。
4.步进电机调整控制:步进电机的位置调整控制通常通过调整脉冲信号的频率和数目来实现。
通过PLC编程,实现步进电机的位置调整功能,从而实现对步进电机位置的精准控制。
5.总体控制设计:在PLC控制系统中,可以将步进电机的正反转及调整控制与其它控制功能相结合,实现对整个自动化系统的精确控制。
通过PLC编程,可以灵活设计多种控制逻辑,满足不同工程项目的需求。
综上所述,通过PLC实现步进电机的正反转及调整控制主要涉及步进电机驱动模块选型、控制程序设计、正反转控制、调整控制和总体控制设计等方面。
通过精心设计和编程,可以实现对步进电机的精确控制,满足各种自动化控制系统的要求。
PLC技术的应用将有助于提高自动化生产设备的生产效率和稳定性,推动工业自动化技术的发展。
步进电机控制方法plc

步进电机控制方法plc随着现代制造业的飞速发展,步进电机作为一种精密控制技术在自动化设备中得到广泛应用,而PLC(可编程逻辑控制器)则是控制步进电机的常见方案之一。
在工业生产中,步进电机的控制方法多种多样,其中结合PLC技术进行控制是一种高效可靠的方式。
本文将介绍一些常见的步进电机控制方法,并分析PLC在这些控制方法中的应用。
正转和反转控制正转和反转控制是步进电机最基本的控制方法之一。
通过控制电机输入的脉冲信号的频率和方向,可以实现步进电机的正转和反转。
在PLC中通常会使用计数器来记录脉冲信号的数量,从而控制电机的转动角度和方向。
通过设定计数器的值和控制脉冲信号的输出频率,可以精确控制步进电机的转动。
速度控制除了控制电机的方向外,控制步进电机的速度也是至关重要的。
在工业自动化系统中,需要根据不同的生产需求来调整步进电机的转速。
PLC可以通过调节输出脉冲信号的频率来实现步进电机的精确速度控制。
通过监控电机的转速并根据实际情况进行调整,可以保证生产过程的稳定性和效率。
位置控制在很多自动化系统中,需要步进电机按照预先设置的位置进行精确定位。
PLC在位置控制中发挥了关键作用。
通过监测电机的位置信息以及输入的控制指令,PLC可以精确地控制步进电机的位置。
在工业生产中,位置控制常常用于需要高精度定位的场景,如自动装配线和自动化仓储系统等。
脉冲控制步进电机的运动是通过输入一定数量的脉冲信号来实现的。
因此,脉冲控制是控制步进电机最基本的方法之一。
PLC通过输出一定频率和数量的脉冲信号,可以精确控制步进电机的运动。
在工业生产中,通常会根据实际需求设定脉冲信号的参数,如脉冲频率、脉冲数量和脉冲方向等,从而实现对步进电机的精确控制。
总结步进电机作为一种精密控制技术,在工业自动化领域具有重要的应用意义。
结合PLC技术可以实现对步进电机的高效控制,包括正转和反转控制、速度控制、位置控制和脉冲控制等。
通过合理设计控制方案并结合PLC的灵活性和可编程特性,可以实现对步进电机运动的精确控制,从而提高生产效率和产品质量。
PLC实现步进电机的正反转及调整控制
PLC实现步进电机的正反转及调整控制
一、PLC实现步进电机的控制原理
拿步进电机举例,大家可以把它想象成一个隔著一定距离的圆盘,隔着每一环的距离形成齿轮的节点。
步进电机的正向或反向转动,就是将这一环索引和圆盘一起发动转动。
步进电机的转动,是靠每一步索引圆盘来完成的,每一步都有一个控制信号来告诉电机从哪一环节点开始转动,当接收到控制信号时,电机开始转动,并且每转一圈循环转动几个索引。
1、正向、反向控制
要实现步进电机的正向反向控制,就要在PLC程序中控制信号形式来实现,一般可以使用两个控制信号,一个是正反控制信号,一个是步进电机转动的速度,要求PLC程序根据正反控制信号来实现正向和反向控制。
正反控制信号就是设置一个开关量变量,当这个开关量为ON时,电机运行正转,当开关量为OFF时,电机运行反转,具体可以采用T函数来实现,T11=1,电机正转,T12=0,电机反转。
由于步进电机的转动是一布一射的过程,所以需要用一个电位器来控制步进电机的转动速度,当电位器的旋钮调整到一定位置时,就会给出一定频率的步进信号,PLC程序可以根据此步进信号,来控制步进电机的转动速度。
PLC高速脉冲输出控制步进电机

PLC高速脉冲输出控制步进电机1. 背景介绍步进电机是一种常见的电动机类型,它具有精准的位置控制和高速运动的特点。
在很多工业自动化应用中,步进电机常常需要与PLC(可编程逻辑控制器)配合使用,以实现精准的位置控制和高速脉冲输出。
本文档将介绍如何通过PLC实现高速脉冲输出控制步进电机的方法和步骤。
2. 所需材料在开始之前,我们需要准备以下材料:•PLC控制器•步进电机驱动器•步进电机•连接线•电源请确保以上材料齐全并符合各自的规格要求。
3. PLC高速脉冲输出控制步进电机的步骤步骤一:连接电源和PLC控制器首先,将电源连接到PLC控制器上。
确保电源的电压和PLC控制器的额定电压匹配。
然后将PLC控制器的电源线连接到电源上,并确保连接牢固。
步骤二:连接步进电机驱动器和PLC控制器将步进电机驱动器的电源线连接到电源上,并确保连接牢固。
然后,将步进电机驱动器的控制线连接到PLC控制器上,确保连接正确。
步骤三:连接步进电机和步进电机驱动器将步进电机的线束连接到步进电机驱动器上,确保连接正确。
根据步进电机的规格要求,选择正确的接线方法。
步骤四:PLC编程在PLC编程软件中进行编程,以实现高速脉冲输出控制步进电机。
以下是一个简单的PLC编程示例:BEGINVARmotor_output: BOOL := FALSE; -- 步进电机控制信号pulse_delay: TIME := T#10MS; -- 脉冲延迟时间,控制步进电机的速度END_VAR-- 主程序WHILE TRUE DO-- 输出一个脉冲信号控制步进电机运动motor_output := NOT motor_output;DELAY pulse_delay; -- 延迟一段时间,控制步进电机的速度END_WHILE;END;以上的PLC程序实现了一个简单的高速脉冲输出控制步进电机的功能。
在主程序中,通过循环不断地输出一个脉冲信号来控制步进电机的运动,同时通过调整延迟时间来控制步进电机的速度。
S7—200PLC的PTO在步进电机位置控制中的应用
S7—200PLC的PTO在步进电机位置控制中的应用研究了高速脉冲串输出在步进电机位置控制中的应用,包括应用PLS指令、MAP指令库及位置控制指令向导等方法。
给出了系统构成,说明了各种方法的应用。
对步进电机的位置控制有实际意义。
标签:S7-200;步进电机;位置控制;PTO;MAP;PLS引言作为自动控制系统中的执行元件,步进电机的应用十分广泛,主要原因是步进电机有很多优点,其中它的控制方法比较简单。
步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲个数。
可以通过控制脉冲频率来控制电机转动的速度和加速度,进行调速;可以通过控制脉冲个数来控制角位移量,进行准确定位。
控制步进电机的方法较多,目前流行的是采用PLC通过步进电机驱动器来控制步进电机。
为了配合步进电机的控制,许多PLC都内置脉冲输出功能,并设置了相应的控制指令,可以很好地对步进电机进行控制。
为了实现对步进电机的开环定位控制,可以通过PLC控制输出脉冲来实现。
本文应用SIEMENS公司S7-200PLC来控制步进电机。
SIEMENS公司S7-200PLC 主要提供了以下几种方式的开环定位控制:脉冲串输出(PTO)、EM253位控模块、自由口通信等。
文章主要探讨PTO这种方式。
1 步进电机位置控制系统1.1 硬件系统步进电机位置控制系统由PLC、步进电机驱动器、步进电机和丝杠组成。
系统选择的PLC为SIEMENS公司CPU226DC/DC/DC型。
選用的步进电机是42H2P4812A4的两相混合式步进电机,该型号的步进电机步矩角为1.8°,相电流1.2A,静转矩4.5kg·cm,额定转速400rmp。
选用的驱动器型号为2MA320,该驱动器的供电电压DC12-36V ,驱动电流0.3-2.0A,细分精度1-128细分,可驱动任何2.0A相电流以下两相、四相混合式步进电机。
由于上述步进电机的相电流为1.2A,驱动器的SW1-SW3分别设置为:ON、OFF、OFF,即输出峰值电流为1.5A,SW5-SW7分别设置为ON、ON、ON,即细分设定为200步/圈。
西门子S7-200系列PLC在步进电机定位控制中的应用
西门子S7-200系列PLC在步进电机定位控制中的应用
西门子S7-200系列PLC可以在步进电机定位控制中扮演关键
角色。
步进电机是一种常用于精确位置控制的电机,可以在不使用传感器的情况下实现准确的位置控制。
PLC可以通过控
制步进电机的驱动器,实现对步进电机的定位控制。
PLC可以接收外部输入信号,用于触发步进电机的运动。
这
些信号可以包括启动信号、停止信号、以及指令信号等。
PLC
可以根据不同的输入信号状态,控制步进电机的运动方向和速度。
PLC可以与步进电机控制器进行通信,以发送指令和接收状
态反馈。
PLC通过发送指令,控制步进电机按照指定的步进
角度或者位置移动。
同时,PLC可以接收步进电机控制器的
状态反馈信息,包括是否到达目标位置、是否超出限位等,以便进行适当的控制策略。
PLC可以与外部设备(例如传感器、触发器等)进行联动,
实现更加复杂的步进电机定位控制。
通过接收外部设备的信号,PLC可以根据具体的应用需求,进行逻辑判断和控制操作,
以实现更加灵活和精确的步进电机定位控制。
西门子S7-200系列PLC在步进电机定位控制中具有广泛的应用。
它可以根据各种输入信号状态,控制步进电机的运动方向和速度,实现精确的位置控制。
同时,PLC还可以与步进电
机控制器和外部设备进行通信和联动,实现更加复杂的控制策略。
PLC控制步进电机的应用案例
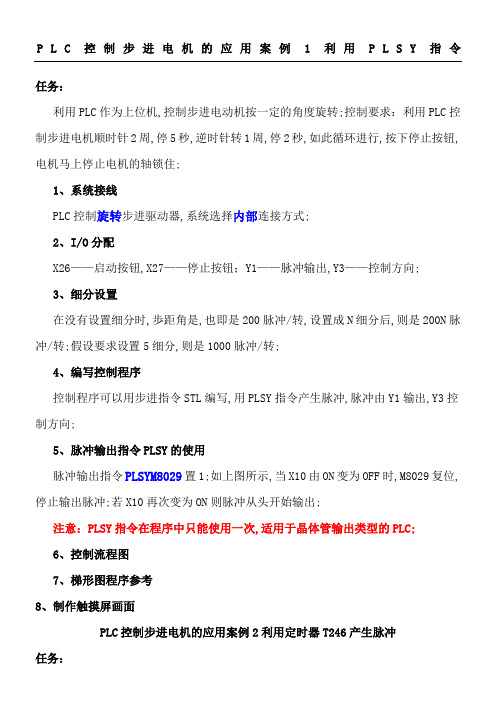
P L C控制步进电机的应用案例1利用P L S Y指令任务:利用PLC作为上位机,控制步进电动机按一定的角度旋转;控制要求:利用PLC控制步进电机顺时针2周,停5秒,逆时针转1周,停2秒,如此循环进行,按下停止按钮,电机马上停止电机的轴锁住;1、系统接线PLC控制旋转步进驱动器,系统选择内部连接方式;2、I/O分配X26——启动按钮,X27——停止按钮;Y1——脉冲输出,Y3——控制方向;3、细分设置在没有设置细分时,歩距角是,也即是200脉冲/转,设置成N细分后,则是200N脉冲/转;假设要求设置5细分,则是1000脉冲/转;4、编写控制程序控制程序可以用步进指令STL编写,用PLSY指令产生脉冲,脉冲由Y1输出,Y3控制方向;5、脉冲输出指令PLSY的使用脉冲输出指令PLSYM8029置1;如上图所示,当X10由ON变为OFF时,M8029复位,停止输出脉冲;若X10再次变为ON则脉冲从头开始输出;注意:PLSY指令在程序中只能使用一次,适用于晶体管输出类型的PLC;6、控制流程图7、梯形图程序参考8、制作触摸屏画面PLC控制步进电机的应用案例2利用定时器T246产生脉冲任务:利用步进电机驱动器可以通过PLC的高速输出信号控制步进电机的运动方向、运行速度、运行步数等状态;其中:步进电机的方向控制,只需通过控制U/D-端的On 和Off就能决定电机的正传或者反转;将光耦隔离的脉冲信号输入到CP端就能决定步进电机的速度和步数;控制FREE信号就能使电机处于自由转动状态;1、系统接线系统选择外部连接方式;PLC控制左右、旋转、上下步进驱动器的其中一个;CP+端、U/D+端——+24VDC;CP-——Y0;U/D-——Y2;PLC的COM1——GND;A、A-——电机A绕组;B、B-——电机B绕组2、I/O分配X0—正转/反转方向,X1—电机转动,X2—电机停止,X4—频率增加,X5—频率减少;Y0—脉冲输出,Y2—方向;3、编写控制程序4、制作触摸屏画面PLC控制步进电机的应用案例3利用FX2N-1PG产生脉冲任务:应用定位脉冲输出模块FX2N-1PG,通过步进驱动系统对机器人左右、旋转、上下运动进行定位控制;控制要求:正向运行速度为1000Hz,连续输出正向脉冲,加减速时间为100ms,1、系统接线系统选择外部连接方式;PLC通过FX2N-1PG控制左右、旋转、上下步进驱动器的其中一个;VIN端、CP+端、U/D+端——+24VDC;CP-——FP;U/D-——Y4;PLC的COM1端、FX2N-1PG的COM0端——GND;A、A-——电机A绕组;B、B-——电机B绕组2、I/O分配X0—正转,X1—反转,Y4—方向;;3、编写控制程序4、制作触摸屏画面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水 位 也 是 相 等 的 ,当 然 更 准 确 的 讲 可 以 采 用 距 离 加 权 的 方 式 计 算 航道任意点余水位。 自 动 验 潮 站 天 文 潮 位 采 用 下 式 计 算 [5] :
自动验潮站余水位采用下式计算: (4) 对 于 航 道 任 意 点 天 文 潮 位 , 首 先 利 用 (3) 式 预 报 得 到 自 动 验 潮 站 的 天 文 潮 位 ,然 后 利 用 时 差 法 计 算 得 到 该 点 的 天 文 潮 位 。 航道任意点余水位采用下式得到:
4 程序设计
上 述 程 序 中 , 应 用 到 了 产 生 脉 冲 的 功 能 指 令 PLSY 。 这条指令 有 两 个 源 操 作 数 [S1 S2] 和 一 个 目 标 地 址 操 作 数 [D],S1 指脉冲的 频 率 ,S2 指 脉 冲 的 个 数 。 根 据 控 制 要 求 ,这 个 步 进 电 机 的 步 距 角 为 1.2° ,则电机转一圈是 360°÷ 1.2° =300个脉冲 , 要求 4细分 ,则是 300 × 4=1200 个脉冲 , 正转 3 周则是 3600 个脉冲 , 反转 2 周是 2400 个脉冲。 同 时 ,M8029 是 特 殊 的 辅 助 继 电 器 , 它 在 脉 冲 产 生 完 毕 就 会 接 通 , 这 些 在 程 序 中 都 有 所 体 现 (如 图 2、 3) 。
式 中 Vc — — 测 量 的 船 速 N— — 换 能 器 每 秒 发 射 的 频 率 次 数 ,一 般 设 定 5。 Ls — — 测 量 的 步 长 W — — 规 范 要 求 的 测 量 投 影 的 最 小 宽 度 ( 如 图 2) 黄 骅 港 航 道 测 量 基 本 参 数 为 :W 一 般 取 值 为 0.3 米 ,Dp 按 最 小 测 深 取 0.628m,Ls 计 算 结 果 为 0.551m,Vc 计 算 结 果 为 5.3 节 。 通 过 以 上 对 航 道 水 深 测 量 误 差 的 分 析 ,黄 骅 港 目 前 采 取 的 测 量 手 段 和 方 法 ,精 度 能 够 满 足 国 家 标 准 和 行 业 标 准 ,可 作 为 航 道 疏 浚 维 护 计 算 依 据,并 且 对 通 航 安 全 水 深 有 所 保 证 。
Ls × N × 3600 1.852 × 1000 Ls = Dp × cos arcsin
W 2 Dp 2
参考文献
[1] 钱 苏 芬 . 水 下 地 形 测 量 测 深 精 度 分 析 . 江 苏 测 绘 ,1999(2). [2] 郭 永 丰 , 等 . 黄 骅 港 航 道 网 络 验 潮 系 统 的 研 究 技 术 方 案 . 天 津 海 事 局 海 测 大 队 ,2 00 4- 6. h(t) = Z 0+Σ m i
科技创新导报
2011 NO.29 Science and Technology Innovation Herald
工 程 技 术
P L C 在步进电机控制中的应用
刘琛森 ( 广西贺州市技工学校 广西贺州 542800) 摘 要: 本文以PLC 作为控制器, 给出它与步进驱动器, 步进电机的接口电路图和相应的执行程序 , 来具体描述PLC 在步进电机控制中的应 用 。 关键词 : 控制要求 端口接线图 细分和电流设置 程序设计 中图分类号 : T N 1 1 文献标识码: A 文章编号 :1 6 7 4 -09 8 X(2 0 1 1 )1 0 (b )-0 1 3 0 -0 2
( 上 接 130 页 ) 有关。 故 我 们 可 以 利 用 PLC 产 生 相 应 的 脉 冲 和 方 向 信 号 , 通 过 步 进 驱动器来对脉冲、 方向信号进行分配和功率放大 , 再去控制步进电 机 每 相 绕 组 是 否 得 电 ,以 此 来 控 制 步 进 电 机 的 运 转 。 图 1是 具 体 的 端口接线电路图。 对 PLC 来 说 , 要 Y0 端 产 生 脉 冲 , 就 是 要 Y0 不 断 的 导 通 、 截止。 当 Y0 导 通 时 ,5V 直 流 电 源 的 正 极 通 过 CP+, 经 过 驱 动 器 内 部 电 子 电 路 到 CP-, 通 过 R 接 到 Y0, 经 过 PLC 输 出 端 的 COM, 再 回 到 5V 直 流 电 源 的 负 极 ,这 样 就 构 成 了 一 个 回 路 。 这 时 ,驱 动 器 内 部 得 到 一 个 高 电 频 ,我 们 用 “ 1” 表示。 当 Y0 截 止 时 , 这 时 回 路 不 能 导 通 , 驱 动 器 内 部 得 到 一 个 低 电 频 , 我们用 “0” 表示。 这 样 , 驱动器的环形分配器 接 收 到 这 样 一 个 脉 冲 信 号 ,再 对 脉 冲 信 号 进 行 分 配 ,控 制 步 进 电 机 的每一相绕组依次得电。 在这里我们借助了 5V 的直流电源 , 来使步 进驱动器这边得到一个脉冲的电流。 这个控制电压一般在 DC 5V24V 之 间 。 其 中 R 是 限 流 电 阻 , 一 般 驱 动 器 的 脉 冲 电 流 在 10MA 左 右 ,R 值 选 择 2K 左 右 。 反向信号、 脱机信号的输入电路和上述的脉 冲信号输入电路原理相同。
参考文献
[1] 可编程序控制器及其应用 . 全国中等职业技术学校电工类专业 通用教材.
3 细分和电流设置
步 进 驱 动 器 的 DIP 开 关 一 共 有 8 个 , 其 中 DIP1 ~ DIP4 为 细 分 设 置 ;DIP5 为 静 态 电 流 设 置 ;DIP6 ~ DIP8 为 输 出 电 流 设 置 。 在步进驱
2 步进电机、 步进驱动器、 PLC 之间的连接
步进电机是一种将脉冲信号转换成直线位移或角位移的执行 元件。 步进电机的输出位移量与输入脉冲个数成正比 , 其速度与脉 冲 频 率 成 正 比 ,其 转 向 与 脉 冲 分 配 到 步 进 电 机 的 各 相 绕 组 的 相 序
( 下 转 132 页 )
1 控制要求
按 下 启 动 按 钮 ,PLC 控 制 步 进 电 机 顺 时 针 转 3 周 , 停 5 秒 ; 再 逆 时 针 转 2周 ,停 3秒 ,如 此 循 环 ;按 下 停 止 按 钮 ,电 机 立 刻 停 止 (电 机 轴 锁 住 ); 按 下 脱 机 按 钮 , 电 机 轴 松 开 。 假设选择的是三相步进电机, 步 距 角 为 1.2 ° , 工 作 时 设 置 为 4 细 分 , 额 定 电 流 为 1.75A, 电 机 停 止 时 ( 电 机 轴 锁 住 ), 静 态 电 流 选 择 为 半 流 。
Vc =
(5)
(6) 以上 (3) ~ (6) 式中 Z 0表示某自动验潮站从验潮零点起算的平均 海面 ; H ii 和 g ii 分 别 为 分 潮 的 振 幅 和 迟 角 ; f i和 u i分 别 为 分 潮 的 交 点 因 数 和 交 点 改 正 角 ; δ i是 分 潮 的 角 速 率 ; v i是 分 潮 的 天 文 初 位 相 ; t 是 计 算 时 刻 ;ζ ( t) 表 示 某 自 动 验 潮 站 的 水 位 观 测 值 ;h( t) 表 示 某 自 动 验潮站的天文潮位 ; δ ( t ) 、 δ i( t ) 表示某自动验潮站的余水位 ; δ x(t) 表 示 航 道 任 意 点 t 时 刻 的 余 水 位 ; r ix 表 示 航 道 任 意 点 到 某 自 动 验 潮 站的距离。 根 据 时 差 法 原 理 并 结 合 黄 骅 港 航 道 实 际 情 况 ,本 系 统 采 用 两 站 改 正 方 式 来 计 算 航 道 任 意 点 实 时 水 位 ,采 用 下 式 计 算 : (7) (7) 式 中 ξ x(t) 表 示 该 点 在 查 询 时 刻 t 的 实 时 水 位 ; R AB 表 示 该 点 到 附 近 A、 B 站 的 距 离 ; R Bx 、 R Ax 分 别 表 示 该 点 到 附 近 A 、 B站 的 距 离 ; τ x表 示 该 点 相 对 于 A 、 B 站 的 潮 时 差 ; τ AB 表 示 A 、 B站 的 潮 时 差 。 本 系 统 采 用 的 潮 汐 预 报 结 合 余 水 位 的 时 差 法 数 学 模 型 ,理 论 合 理 并 且 充 分 考 虑 了 工 程 应 用 的 角 度 ,具 有 可 操 作 性 。 2 . 3 气差影响 气 差 主 要 是 声 波 在 海 水 中 传 播 所 带 来 的 影 响 ,主 要 有 :海 水 的 温度、 盐度等。 常规改正方法是采用回波测深仪自带的声速仪进行 气 差 测 定,然 后 进 行 改 正 。 水 深 测 量 原 理 如 图 1所 示 : 深 度 R= c t / 2 c: 理 论 声 速 。 常 温 海 水 中 1500m/s 。 t: 发 射 信 号 到 接 收 到 回 波 的 时 长 。 用传统声速测定仪改正水深气差影响的方法是测定水深剖面
132
科技创新导报 Science and Technology Innovation Herald
科 技 的 发 展 ,步 进 电 机 在 国 内 的 数 字 控 制 系 统 中 的 应 用 十 分 广泛。 本 文 以 PLC 作 为 控 制 器 , 给 出 它 与 步 进 驱 动 器 , 步 进 电 机 的 接 口 电 路 图 和 相 应 的 执 行 程 序 , 来 具 体 描 述 PLC 在 步 进 电 机 控 制 中的应用。 如 今 , 许 多 技 工 学 校 都 开 设 了 PLC 这 门 课 程 , 故 也 可 以 把 PLC 如 何 控 制 步 进 电 机 工 作 作 为 案 例 列 入 到 PLC 实 训 课 程 中 , 这 样 既 能 提 升 PLC 课 程 教 学 的 整 体 性 和 系 统 性 , 也 能 增 加 学 生 的 学习热情。
图2
图3
பைடு நூலகம்图1
130
科技创新导报 Science and Technology Innovation Herald