三菱plc控制步进电机编程
步进电机的三菱PLC控制
步进电机的三菱P L C控制Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】摘要:设计一种基于PLC的步进电机控制系统, 通过微型变速箱将步进电机角位移转化为直线位移, 进而带动直线伸缩机构运行。
该系统结构简单、性能稳定、经济价值和使用效果突出, 能够满足毫米级精确位移的使用需求。
关键词: PLC; 步进电机; 驱动器; 脉冲;方向。
目录第1章绪论设计背景步进电动机已成为除直流电动机和交流电动机以外的第三类电动机,传统电动机作为机电能量转换装置,在人类的生产和生活进入电气化过程中起着关键的作用。
可是在人类社会进入自动化时代的今天,传统电动机的功能已不能满足工厂自动化和办公自动化等各种运动控制系统的要求。
为适应这些要求,发展了一系列新的具备控制功能的电动机系统,其中较有自己特点,且应用十分广泛的一类便是步进电动机。
步进电动机的发展与计算机工业密切相关。
自从步进电动机在计算机外围设备中取代小型直流电动机以后,使其设备的性能提高,很快地促进了步进电动机的发展。
另一方面,微型计算机和数字控制技术的发展,又将作为数控系统执行部件的步进电动机推广应用到其他领域,如电加工机床、小功率机械加工机床、测量仪器、光学和医疗仪器以及包装机械等。
任何一种产品成熟的过程,基本上都是规格品种逐步统一和简化的过程。
现在,步进电动机的发展已归结为单段式结构的磁阻式、混合式和爪极结构的永磁式三类。
爪极电机价格便宜,性能指标不高,混合式和磁阻式主要作为高分辨率电动机,由于混合式步进电动机具有控制功率小,运行平稳性较好而逐步处于主导地位。
最典型的产品是二相8极50齿的电动机,步距角°/°(全步/半步);还有五相10极50齿和一些转子100齿的二相和五相步进电动机,五相电动机主要用于运行性能较高的场合。
到目前,工业发达国家的磁阻式步进电动机已极少见[1]。
fx3u回原点指令
fx3u回原点指令
FX3U PLC(可编程逻辑控制器)是三菱电机生产的一种常见的PLC型号。
要实现回原点指令,通常需要使用特定的指令或功能模块。
在FX3U PLC中,回原点指令通常用于控制步进电机或伺服电机
等执行器回到初始位置。
以下是一些可能的方法来实现回原点指令:
1. 使用特定的运动控制功能模块,FX3U PLC通常支持运动控
制功能模块,例如FX3U-20SSC-H等。
这些功能模块可以与步进电机
或伺服电机配合使用,通过特定的指令来实现回原点操作。
2. 编写自定义的回原点程序,在FX3U PLC的编程软件中(如GX Works2),可以编写自定义的回原点程序。
这通常涉及到使用特
定的运动控制指令或者对执行器进行位置控制,以使其回到初始位置。
3. 使用PLC内置的位置控制指令,一些FX3U PLC可能具有内
置的位置控制指令,可以直接用于实现回原点操作。
这些指令通常
包括设置目标位置、启动运动、监视位置等功能。
无论采用哪种方法,实现回原点指令都需要考虑到具体的执行
器类型、运动控制要求以及安全性等因素。
在实际应用中,还需要考虑到PLC与执行器的通讯方式、传感器的使用以及异常情况的处理等方面。
希望以上信息能够对你有所帮助。
PLC的脉冲输出控制步进电机的实用方法
断电复位方可有效。 步进电机的型号是86BYG402,其相电流选4A,拨位
开关1 2 3 4设定值为1111。细分数根据实际应用的精度 要求来选取。
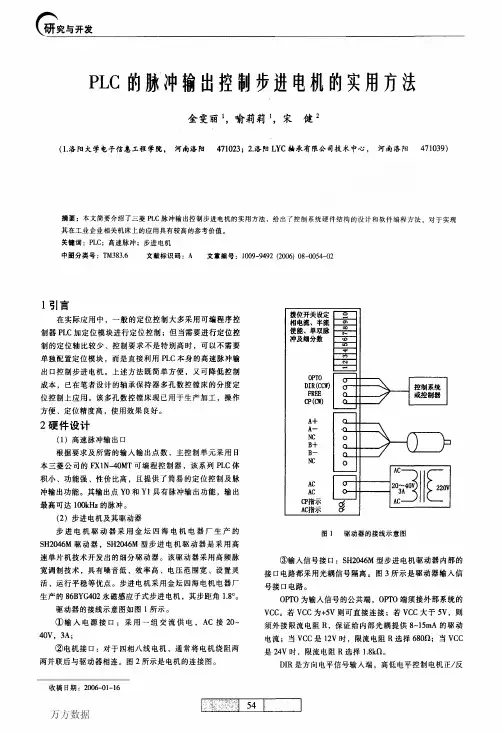
(3)PLC与步进电机驱动器的硬件连接 可编程序控制器PLC与步进电机驱动器的连接如图4
2.期刊论文 胡佳丽.闫宝瑞.张安震.李庆春.何亚东.信春玲 S7-200 PLC在伺服电机位置控制中的应用 -自动化仪
表2009,30(12)
为了探究如何更方便、准确地实现位置控制,确保其位置控制的精度,探讨了基于西门子S7-200系列PLC和Copley系列伺服系统的位置控制方法.通过 介绍系统软硬件构成及其特点,详细论述了PLC系统通过高速脉冲输出、EM253位置控制模块以及自由口通信这三种方式控制伺服电机,以实现绝对运动、 相对运动等;同时对它们进行了一系列的比较.实验证明,三种控制方式各有其不同的应用场合,对类似的工业控制具有一定的借鉴参考意义.
1234 1000 100l 1010 1011 1100 1101 11lO 1111
相电流 2.25A 2.50A 2.75A 3.OOA 3.25A 3.50A 3.75A 4.00A
表2 细分设定【位7 8 9 10)
7 8 9 10 0000 0001 oolO 0011 0100 0101 0110 0111
在图4中将可编程序控制器的脉冲输出端yo的公共端como和输出点y10的公共端com4皆与可编程序控表1相电流设定i位12341234相电流1234相电流0000025a1000225a0001050a100l250a0010075a1010275a00111ooa10113ooa0100125a1100325a0101150a1101350a0110175a11lo375a01112ooa1111400a表2细分设定位7891078910细分数789lo细分数0000110001800012100l20oolo410lo32001151011400100611005001018110l01101011101280111161111256制器的24v地即com相连步进电机驱动器的输入信号公共端与可编程序控制器plc的24v电源相连plc的脉冲输出端yo外接18k的限流电阻连接至步进脉冲输入信号cpplc的输出点y10用于控制步进电机的旋转方wc咖024vsh204硼步进电机驱动器fxlhomtc删0ptp18置yot一c卜一cp18置y10dir图4plc与步进电机驱动器的连接向外接18k的限流电阻连接至方向电平输入端dir
plc控制步进电机程序.
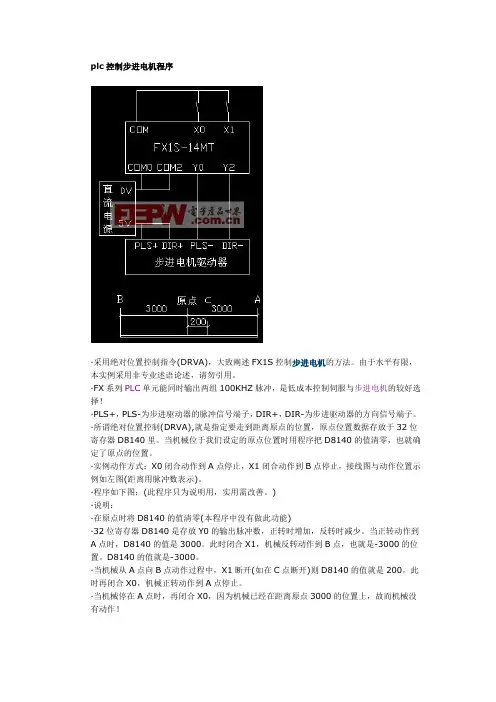
plc控制步进电机程序·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。
由于水平有限,本实例采用非专业述语论述,请勿引用。
·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。
当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。
)·说明:·在原点时将D8140的值清零(本程序中没有做此功能)·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。
当正转动作到A点时,D8140的值是3000。
此时闭合X1,机械反转动作到B点,也就是-3000的位置。
D8140的值就是-3000。
·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。
D8140的值为0·当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。
三菱实用定位控制程序案例
三菱实用定位控制程序案例
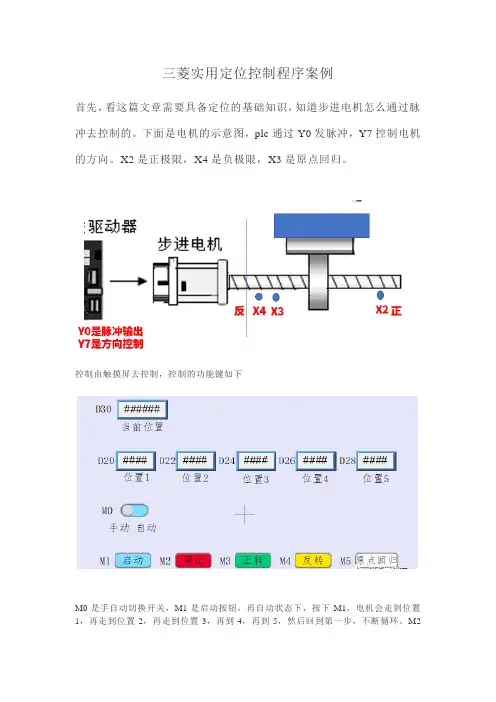
首先,看这篇文章需要具备定位的基础知识,知道步进电机怎么通过脉冲去控制的。
下面是电机的示意图,plc通过Y0发脉冲,Y7控制电机的方向。
X2是正极限,X4是负极限,X3是原点回归。
控制由触摸屏去控制,控制的功能键如下
M0是手自动切换开关,M1是启动按钮,再自动状态下,按下M1,电机会走到位置1,再走到位置2,再走到位置3,再到4,再到5,然后回到第一步,不断循环。
M2
是停止的按钮,按下去后动作停止,M3是正转点动控制,M4是反转点动控制,M5是原点回归启动,按下原点回归,电机能够自动回到原点X3。
下面我们开始写程序,先写手动控制的程序,两个对应的M点分别控制输出正转和反转,把正反极限写入。
PLC控制步进电机正反转实验
第 1 章PLC控制步进电机正反转实验1.1实验目的1、了解PLC的理论与原理;2、掌握PLC编程与操作方法。
3、了解接近传感器的使用方法1.2实验设备1、三菱PLC编程电缆及安装好三菱编程软件的计算机一台;2、模块化柔性制造系统一套。
1.3实验原理料库旋转台是依靠步进电机控制的,高精度旋转模块。
依靠PLC 自身含有的脉冲单元,发出驱动脉冲给步进电机驱动器。
驱动器接收到该脉冲以后,根据所发脉冲的频率和数量驱动步进电机向相应的方向旋转。
1、步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
永磁式步进电机永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进电机反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
《三菱FX5U可编程控制器与触摸屏技术》课件—2.4 步进电机转速监控
实际转速显示框的设置
“种类”设置为“数值显示”,数据类型设置为有符号BIN16,字体设为 “12点阵高质量黑体”,尺寸设为4*6,显示格式设为“实数”,整数位3位,小 数位1位。
五、PLC编程指令及样例程序
本任务中PLC发出脉冲信号驱动步进电动机转动,编码器输出脉冲信号送 入PLC监控实际转速。因此,需要进行输出脉冲和高速计数输入采样。
1)输出电流的设定。步进电动机驱动器输出电流的设定以略大于步进电动机的 工作电流为准。42BYGH107 步进电动机的工作电流为0.4A,驱动器输出选择 0.5A档位,使用螺钉旋具将图所示箭头指向0.5档。
2)细分脉冲数的设定。拨码开关来控制,对应细分脉冲数见表,在本任务中设 定为D3 ON、D4 OFF,细分数为3200,如图所示。
设定转速输入框的设置
在软元件属性界面上设置如图2-14,2-15所示,“种类”设置为“数值输入”,数据类型 设置为有符号BIN16,字体设为“12点阵高质量黑体”,尺寸设为4*6,显示格式设为“实数”, 整数位3。小数位1位。在样式中选择图形,是否闪烁,数值颜色设为黄色。
“基本设置” 中的输入范围,根据实际情况设为5~20,低于5时步进电机转矩不足无法转动。
四、组态画面设计
1、新建工程:根据工程新建步进电动机转速监控文件。 2、文本输入:完成步进电机转速监控、正转指示、反转指示、设定频率、实 际频率文本输入。 3、按钮设置:完成正转按钮、反转按钮设置 4、指示灯设置:完成正转指示灯、反转指示灯设置 5、设定转速输入框的设置 6、实际转速显示框的设置 7、工程下载:将触摸屏界面下载到三菱触摸屏中。
PLC实现步进电机的正反转和调整控制
PLC实现步进电机的正反转和调整控制PLC(可编程逻辑控制器)是一种用于自动化控制系统的可编程电子设备。
在工业领域,PLC被广泛应用于各种自动化设备和机器的控制。
步进电机是一种非塔式电机,其运动是以固定的步长进行的,适用于需要精确定位的应用,如印刷机、数控机床等。
本文将介绍如何使用PLC实现步进电机的正反转和调整控制。
步进电机的正反转控制可以通过改变电机的运行顺序来实现。
一种常见的方法是使用四相步进电机,通过改变电机的相序来实现正反转。
一般来说,步进电机有两种驱动方式:全步进和半步进。
全步进驱动方式是指每次脉冲信号到达时,电机转动一个步进角度。
全步进驱动方式可以通过控制PLC输出的脉冲信号来实现。
例如,当需要电机正转时,在PLC程序中输出连续的脉冲信号,电机将按照一定的步进角度顺时针旋转。
当需要反转时,输出连续的反向脉冲信号,电机将逆时针旋转。
半步进驱动方式是指每次脉冲信号到达时,电机转动半个步进角度。
半步进驱动方式可以通过改变输出的脉冲信号序列来实现。
例如,正转时输出连续的脉冲信号序列:1000、1100、0100、0110、0010、0011、0001、1001,电机将按照半个步进角度顺时针旋转;反转时输出反向脉冲信号序列:1001、0001、0011、0010、0110、0100、1100、1000,电机将逆时针旋转。
调整控制是指通过PLC来调整步进电机的运行速度和位置。
调速控制可以通过改变输出脉冲信号的频率来实现。
例如,可以定义一个计时器来控制输出脉冲信号的频率,通过改变计时器的时间参数来改变电机的速度。
较小的时间参数将导致更快的脉冲频率,从而使电机加快转速。
位置控制可以通过记录步进电机当前的位置来实现。
可以使用PLC的存储和控制功能来记录和更新电机的位置信息。
例如,可以使用一个变量来保存电机当前的位置,并在转动过程中不断更新该变量的值。
通过读取该变量的值,可以获得电机当前的位置信息。
总结起来,使用PLC实现步进电机的正反转和调整控制可以通过控制输出的脉冲信号序列和频率来实现。
三菱plc控制步进电机编程知识讲解
三菱p l c控制步进电
机编程
三菱plc控制步进电机编程
控制要求,PLC发出脉冲信号Y0和方向信号Y10,假设步进电机转一周需要plc发出1000个脉冲,且要求在1S 左右转动一周,现在要求步进电机正转5周,停5s,再反转5周,停5s,如此循环。
三菱PLC指令PLSR K400 D0 K3500 Y0 这里K400、D0、K3500各是指什么
匀加减速指令,在指令中可以设置脉冲的最大频率、脉冲总数、加减速时间和脉冲输出点。
通过设置加减速时间来实现匀加速。
如果脉冲加方向的脉冲模式也需要另外控制方向点。
针对指定的最高频率,进行定加速,在达到所指定的输出脉冲数后,进行定减速
k400为最高频率,D0中内容为总输出的脉冲数,K3500加减速时间单位为ms,y0为输出点
如 DDRVI K999999 K200 Y0 Y3
那么 DDRVI 是相对定位 K999999是无限就是一直转 K200是速度 Y0是脉冲输出地址 Y3是方向PLC控制步进电机正反转的程序和梯形图?
一种是双脉冲的!一路正,一路反。
一种是脉冲加方向的!一个口给脉冲!另外一个接通就正转,不接通就反转。
欧姆龙EE-SX670A传感器。
PLC如何控制步进电机
PLC如何控制步进电机PLC(可编程逻辑控制器)是一种广泛应用于工业自动化领域的控制设备,通过输入/输出模块对各种机电设备进行控制。
在PLC系统中,步进电机是常见的执行元件之一,它具有准确的位置控制和高的加减速性能。
本文将介绍PLC如何控制步进电机,包括步进电机的驱动方式、PLC的控制原理及步进电机控制的程序设计。
一、步进电机的驱动方式1.串行通信驱动方式:步进电机通过串行通信驱动方式与PLC进行通信和控制。
首先,将PLC与串行通信模块相连,通过串行通信模块与步进电机控制器进行通信。
PLC通过串行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
2.并行通信驱动方式:步进电机通过并行通信驱动方式与PLC进行通信和控制。
与串行通信驱动方式类似,首先将PLC与并行通信模块相连,通过并行通信模块与步进电机控制器进行通信。
PLC通过并行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
3.脉冲驱动方式:步进电机通过脉冲驱动方式与PLC进行通信和控制。
在脉冲驱动方式中,需要PLC输出脉冲信号控制步进电机。
通常情况下,PLC将脉冲信号传递给步进电机驱动器,在驱动器中产生相应的控制信号,实现对步进电机的控制。
二、PLC的控制原理PLC作为控制器,一般采用扫描运行方式。
其运行原理如下:1.输入信号读取:PLC将外部输入信号输入到输入模块中,采集输入信号,并将其从输入模块传递给中央处理器(CPU)进行处理。
2. 程序执行:CPU根据事先编写好的程序进行处理,包括数据处理、逻辑运算和控制计算等。
PLC程序一般采用ladder diagram(梯形图)进行编写。
3.输出信号控制:根据程序的执行结果,CPU将处理好的数据通过输出模块发送给外部设备,用于控制和操作外部设备。
三、步进电机控制的程序设计步进电机的控制程序主要包括参数设定、模式选择、起停控制、运动控制等部分。
下面以一个简单的例子来说明步进电机控制的程序设计过程:1.参数设定:首先需要设定步进电机的一些参数,如电机型号、步距角度、运动速度等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三菱plc控制步进电机编程
控制要求,PLC发出脉冲信号Y0和方向信号Y10,假设步进电机转一周需要plc发出1000个脉冲,且要求在1S 左右转动一周,现在要求步进电机正转5周,停5s,再反转5周,停5s,如此循环。
三菱PLC指令PLSR K400 D0 K3500 Y0 这里K400、D0、K3500各是指什么
匀加减速指令,在指令中可以设置脉冲的最大频率、脉冲总数、加减速时间和脉冲输出点。
通过设置加减速时间来实现匀加速。
如果脉冲加方向的脉冲模式也需要另外控制方向点。
针对指定的最高频率,进行定加速,在达到所指定的输出脉冲数后,进行定减速
k400为最高频率,D0中内容为总输出的脉冲数,K3500加减速时间单位为ms,y0为输出点
如DDRVI K999999 K200 Y0 Y3
那么DDRVI 是相对定位K999999是无限就是一直转K200是速度Y0是脉冲输出地址Y3是方向PLC控制步进电机正反转的程序和梯形图?
一种是双脉冲的!一路正,一路反。
一种是脉冲加方向的!一个口给脉冲!另外一个接通就正转,不接通就反转。
欧姆龙EE-SX670A传感器。