变速跑马灯的proteus仿真电路及C语言程序设计
微机原理(基于PROTEUS的跑马灯系统设计及仿真)

学号:课程设计题目基于PROTEUS的跑马灯系统设计及仿真学院自动化学院专业自动化班级姓名指导教师2012 年 1 月12 日任务书目录引言 (1)1总体方案论证 (2)1.1功能分析 (2)1.2系统连接图设计 (2)1.2.1锁存控制电路 (5)1.2.2可编程并行通信接口芯片8255A (6)2程序流程图设计及其说明 (9)3关键程序段落说明 (11)3.1数据段定义 (11)3.2程序初始化 (11)3.3芯片初始化 (12)3.4初始LED亮灭状态 (12)3.5检测按键开关子程序 (12)3.6延时程序片段 (14)3.7灯光变换控制 (15)4程序调试说明 (16)5结果记录及分析 (17)心得体会 (19)参考文献 (20)引言微型计算机简称微机,由于具备人脑某些功能,所有又叫做微机。
是由大规模集成电路组成的、体积较小的电子计算机。
它是以微处理器为基础,配以存储器及输入输出接口电路和相应的辅助电路构成的裸机。
把微型计算机集成在一个芯片上即构成单片微型计算机。
学习微机原理与接口技术,主要容包括微型计算机体系结构、8086微处理器和指令系统、汇编语言、设计以及微型计算机各个组成部分,而其中很大一块就是汇编语言的学习。
汇编语言是面向机器的程序设计语言,也是利用计算机所有硬件特性并能直接控制硬件的语言。
用汇编语言编写的程序由于目标程序占用存少,运行速度快,它有着高级语言不可替代的用途。
因此,学习汇编语言是很必要的,通过学习汇编语言可以体会它的作用。
通过本次课程设计让我们进一步深入汇编语言的学习,掌握简单的接口设计技术,将理论知识联系实际,进一步学习微机原理与接口技术的相关知识,为以后深入学习打下良好的基础。
1总体方案论证1.1功能分析此次课程设计的要求为,设计微型计算机最小系统,实现跑马灯的模拟显示功能。
具体要求为:(1)、输入设备三个启动按钮、一个停止按钮,输出设备为八个跑马灯;(2)、三个启动按钮对应三种跑马灯显示效果,按下任意一个启动按钮,跑马灯显示对应的效果,按下停止按钮则跑马灯全部熄灭。
微机原理(基于PROTEUS的跑马灯系统设计及仿真)资料
课程设计题目基于PROTEUS的跑马灯系统设计及仿真学院自动化学院专业自动化班级姓名指导教师2012 年 1 月12 日任务书目录引言 (1)1总体方案论证 (2)1.1功能分析 (2)1.2系统连接图设计 (2)1.2.1锁存控制电路 (5)1.2.2可编程并行通信接口芯片8255A (6)2程序流程图设计及其说明 (9)3关键程序段落说明 (11)3.1数据段定义 (11)3.2程序初始化 (11)3.3芯片初始化 (12)3.4初始LED亮灭状态 (12)3.5检测按键开关子程序 (12)3.6延时程序片段 (14)3.7灯光变换控制 (15)4程序调试说明 (16)5结果记录及分析 (17)心得体会 (19)参考文献.................................................................. 错误!未定义书签。
引言微型计算机简称微机,由于具备人脑某些功能,所有又叫做微机。
是由大规模集成电路组成的、体积较小的电子计算机。
它是以微处理器为基础,配以内存储器及输入输出接口电路和相应的辅助电路构成的裸机。
把微型计算机集成在一个芯片上即构成单片微型计算机。
学习微机原理与接口技术,主要内容包括微型计算机体系结构、8086微处理器和指令系统、汇编语言、设计以及微型计算机各个组成部分,而其中很大一块就是汇编语言的学习。
汇编语言是面向机器的程序设计语言,也是利用计算机所有硬件特性并能直接控制硬件的语言。
用汇编语言编写的程序由于目标程序占用内存少,运行速度快,它有着高级语言不可替代的用途。
因此,学习汇编语言是很必要的,通过学习汇编语言可以体会它的作用。
通过本次课程设计让我们进一步深入汇编语言的学习,掌握简单的接口设计技术,将理论知识联系实际,进一步学习微机原理与接口技术的相关知识,为以后深入学习打下良好的基础。
1总体方案论证1.1功能分析此次课程设计的要求为,设计微型计算机最小系统,实现跑马灯的模拟显示功能。
单片机整套实验及程序(交通灯_跑马灯等)
实验1 跑马灯实验一、实验目的●初步学会Proteus ISIS和uVision2单片机集成开发环境的使用;●初步掌握采用汇编语言与C语言开发单片机系统的程序结构;●掌握80C51单片机通用I/O口的使用;●掌握单片机内部定时/计数器的使用及编程方法以及中断处理程序的编写方法。
二、实验设备及器件●硬件:PC机,HNIST-1型单片机实验系统●软件:Proteus ISIS单片机仿真环境,uVision2单片机集成开发环境三、实验内容●编写一段程序,采用P1口作为控制端口,使与P1口相接的四个发光二极管〔D1、D2、D3、D4〕按照一定的方式点亮。
如点亮方式为:先点亮D1,延时一段时间,再顺序点亮D2……D4,然后又是D4……D1,同时只能有一个灯亮;然后每隔一段时间一次使相邻两个灯亮,三个灯亮,四个灯亮,最后闪烁三次,接着循环变化。
●基于Proteus ISIS仿真环境完成上述功能的仿真。
●基于uVision2单片机集成开发环境与硬件平台完成程序的脱机运行。
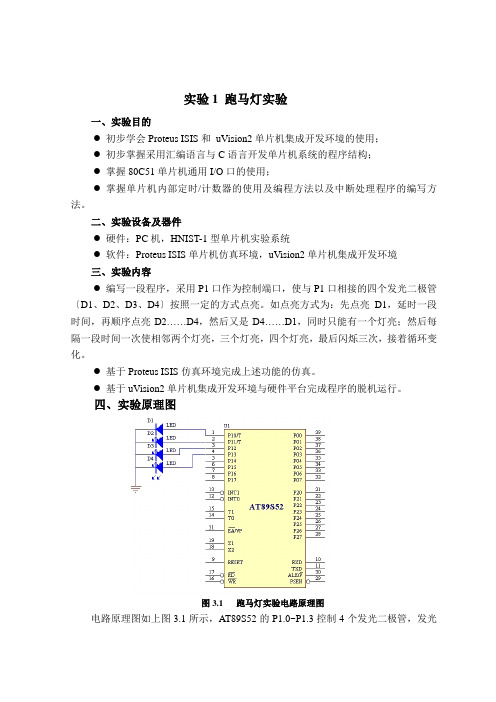
四、实验原理图图3.1 跑马灯实验电路原理图电路原理图如上图3.1所示,AT89S52的P1.0~P1.3控制4个发光二极管,发光二极管按照一定次序发光,相邻发光二极管的发光时间间隔可以通过定时器控制,还可以通过软件延时实现。
五、软件流程图与参考程序●主程序流程图如下:●参考程序#include<reg52.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intuchar aa,num,speed,flag;uchar code table[]={0x0e,0x0d,0x0b,0x07};uchar code table1[]={0x0a,0x05,0x09,0x06};uchar codetable2[]={0x0c,0x09,0x03,0x08,0x01,0x0e,0x0c,0x08,0x00};void delay(uint z)//延时函数{uint x;uchar y;for(x=z;x>0;x--)for(y=200;y>0;y--);}void init()//条件初始化函数{ flag=0;speed=10;//控制跑马灯流水速度TMOD=0x01;//中断方式TH0=(65535-50000)/256;TL0=(65536-50000)%256;//初值EA=1;//翻开总中断ET0=1;//翻开外中断0TR0=1;}void main(){init();//调用初始化函数while(1){if(flag){delay(2000);//调用延时函数for(num=0;num<4;num++)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);}for(num=3;num>0;num--)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);}for(num=0;num<4;num++)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=3;num>0;num--)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=0;num<6;num++)//两个,三个,四个跑马灯依次闪烁{P1=table2[num];delay(2000);}for(num=0;num<5;num++)//闪烁5次{P1=0xff;//全暗delay(2000);P1=0X00;//全亮delay(2000);}speed=speed-3;//变速if(speed==4){speed=10;}}}}void timer0() interrupt 1//中断函数{TH0=(65535-50000)/256;TL0=(65536-50000)%256;aa++;if(aa==speed){aa=0;flag=1;}}六、实验思考题●请用汇编指令完本钱实验内容,深刻理解汇编语言程序设计结构。
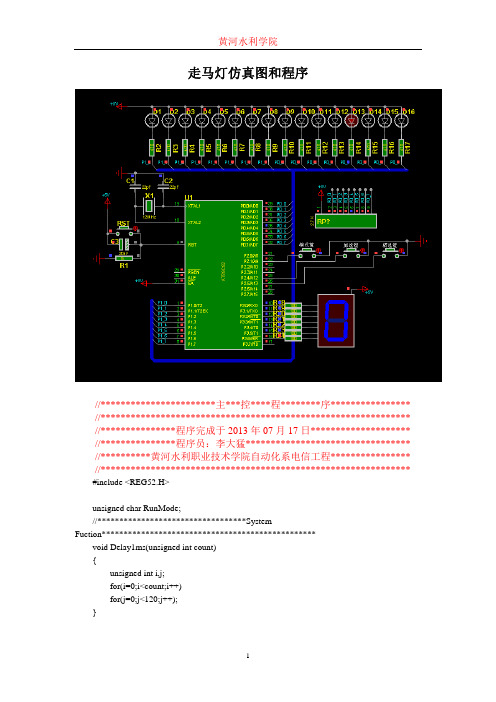
走马灯仿真图和程序
7
黄河水利学院
LEDFlash(6); } } if(Key&0x04) { if(SystemSpeedIndex<28) {
++SystemSpeedIndex; SetSpeed(SystemSpeedIndex); } else { LEDFlash(6); } } }
2
黄河水利学院
return Key; }
unsigned int TimerCount,SystemSpeed,SystemSpeedIndex;
void InitialTimer2(void)
{
T2CON = 0x00; TH2 = RCAP2H = 0xFC; ET2=1;
//16 Bit Auto-Reload Mode //重装值,初始值 TL2 = RCAP2L = 0x18; //定时器 2 中断允许
else LEDShow(~(0xF000>>LEDIndex));
if(LEDIndex==15) LEDDirection = !LEDDirection;
LEDIndex = (LEDIndex+1)%16; }
5
黄河水利学院
//Mode 7 void Mode_7(void) {
if(LEDDirection) LEDShow(0x003F<<LEDIndex);
//************************************************************************* **********
《单片机原理及应用》跑马灯
《单片机原理及应用》跑马灯设计说明书第一章设计任务此次单片机设计任务是要求:按下按键三之后,灯的上半部分(四个灯)和下半部分交替闪烁9次,按下按键四之后,灯光全亮全灭九次。
在执行跑马灯的代码时,按下按键四,执行全亮全灭的时候,再按下按键三,灯光会先执行按键三的指令,然后再执行按键四的指令,也就是说按键三比按键四的优先级高,这就是此次单片机的设计任务。
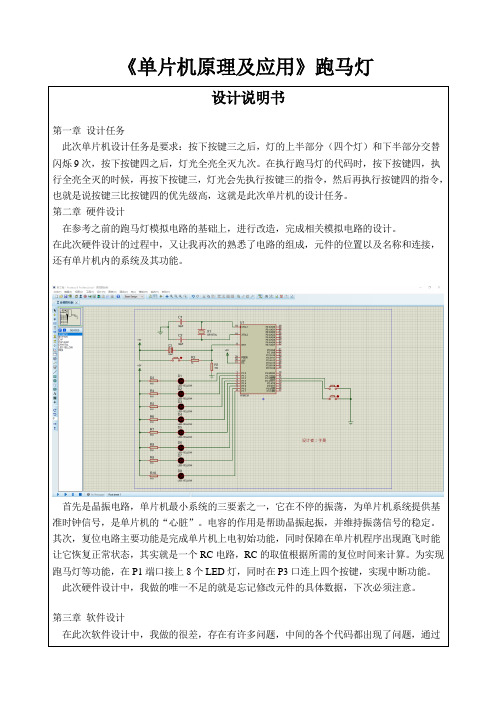
第二章硬件设计在参考之前的跑马灯模拟电路的基础上,进行改造,完成相关模拟电路的设计。
在此次硬件设计的过程中,又让我再次的熟悉了电路的组成,元件的位置以及名称和连接,还有单片机内的系统及其功能。
首先是晶振电路,单片机最小系统的三要素之一,它在不停的振荡,为单片机系统提供基准时钟信号,是单片机的“心脏”。
电容的作用是帮助晶振起振,并维持振荡信号的稳定。
其次,复位电路主要功能是完成单片机上电初始功能,同时保障在单片机程序出现跑飞时能让它恢复正常状态,其实就是一个RC电路,RC的取值根据所需的复位时间来计算。
为实现跑马灯等功能,在P1端口接上8个LED灯,同时在P3口连上四个按键,实现中断功能。
此次硬件设计中,我做的唯一不足的就是忘记修改元件的具体数据,下次必须注意。
第三章软件设计在此次软件设计中,我做的很差,存在有许多问题,中间的各个代码都出现了问题,通过此次的失败,我总结了经验,明白了中断设计的函数应该怎那么写,参考了一下往日的作业,基本弄清了这类代码应该怎么写,但是仍然不熟练,还是需要多加练习,多加思考,争取能够自己独立写出程序代码。
第四章调试过程调试失败,在改进之后的代码进入调试之后,还是成功了的。
第五章总结此次单片机设计测试中主要考察了中断系统的使用,同时在硬件的设计上也有了更多的要求,在编写代码的同时还需要自主的设计和铺设电路,此次代码编写需要考虑全面,容易缺少程序,需要细心编写。
同时,在编写代码的时候,容易出错,出错的时候不能够慌,应该细心下来思考问题所在,此次测试中,看出来了我自身写代码的经验不足,使得代码编写非常错误,还有就是平时训练的还是比较少,以后应该多加训练。
微机原理(基于PROTEUS的跑马灯系统设计及仿真)
dl3:decbx
jnz dl3
deccx
jnz dl4
jmp ledflash
exit:
movnum,0
jmp here
ledflash endp
csegends
endstart
4程序调试说明
(1)、内存空间分配,汇编语言的重要特点之一是能够直接利用机器指令或者伪指令为数据或者代码程序分配内存空间,86系列(如8086微处理器)的存储器结构是分段的,有代码段,数据段,堆栈段或附加段,在程序设计时要充分考虑分段结构,要执行的程序段应设在当前段(活动段)中;分配内存空间:直接在proteus里面将8086CPU的internal memory size设置成一个足够用的空间大小,如0x1000,默认的空间大小是0x00000,如不改则仿真不成功。
[SPICE]error---too many iterations without coFra bibliotekvergence
在仿真过程中,出现以上两行的错误,太多的迭代没有收敛性,和某个汇编语言在编码过程中的地址不正确,经过排查程序去除无用代码,proteus不再报错。
(3)、8255A隐藏引脚问题,需要设置芯片Hidden Pins里的GND改为VSS,VCC改为VDD。
如图所示我们利用启动按钮作为输入信号,通过8255A端口扩展芯片,调节输出端口的电平变化,来控制共阳极的LED灯的亮与灭,实现跑马灯不同的花样变化。
图跑马灯电路图
1.2.1锁存控制电路
锁存控制电路电路如图所示,在微控制器单元(MCU)中,寄存器是十分重要的资源。寄存器的主要作用是快速寄存算术逻辑运算单元(ALU)运算过程中的数据,其锁存功能利用74LS273来实现,74LS273是一种带清除功能的8D触发器,1D~8D为数据输入端,1Q~8Q为数据输出端,正脉冲触发,低电平清除,常用作数据锁存器,地址锁存器。
11.2 跑马灯控制程序设计

二、跑马灯控制程序设计 结合顺序控制设计法来设计跑马灯控制程序。
首先来看一下该任务的控制要求: 要求通过启动按钮SB1使得8盏灯按照L0、L1~L7的 顺序亮,每隔1S亮一盏灯;再按L7、L6~L1、L0的 顺序灭,每隔1S灭一盏灯;如此循环,直至按下停 止按钮SB2,全部灯熄灭,停止工作。
下面我们按步来看一下程序的编写: (2)S1步:S1步是起始步,表示程序开始运行,满足 转换条件SB1可以进入S2步。SB1为启动按钮I0.0,按 下后程序开始运行,S2步激活。我们使用M0.0来指示 启停状态,M0.0为1表示启动,M0.0为0表示停止。这 段程序比较简单,使用置位线圈指令,当I0.0按下, 使M0.0置位为1。
厦电气门控大制学实物践理训与练M机O电OC工课程程学团院队
(4)S3步和S4步
S3步负责控制左移,S4步负责控制右移,这两步 是密切相关的。由于操作对象是MW20,是一个字的存 储空间,所以我们要选择字的移位指令。如图蓝色圈 中所示,使用移位脉冲T1,T1每1S产生一个下降沿, 检测这个下降沿使移位指令产生移位。如图红色圈中 所示,在写入初值后,一次移一位,先左移,就会看 到MB20的各个位,从M20.0至M20.7依次变1;等M20.7 变1了,再右移,一次移一位,就会看到MB20的各个 位,从M20.7至M20.0依次变0。
厦电气门控大制学实物践理训与练M机O电OC工课程程学团院队
第二项工作是为移位对象写入初值,有的同学要 问了,移位对象不是输出Q0.0至Q0.7吗?应该这么说 ,控制Q0.0至Q0.7是我们的目的,怎么来达到这个目 的呢?为了避免直接控制输出所带来的误操作,我们 要使用一个中间存储空间MW20来作为移位对象,将移 位后的结果通过MB20来传送到QB0。我们来看看这个 MW20的空间,MW20包含MB20和MB21两个字节,给这个 空间填入初值W#16#FF,这时MB20的各个位为0,MB21 的各个位为1。
PROTEUS__跑马灯__单片机课程设计
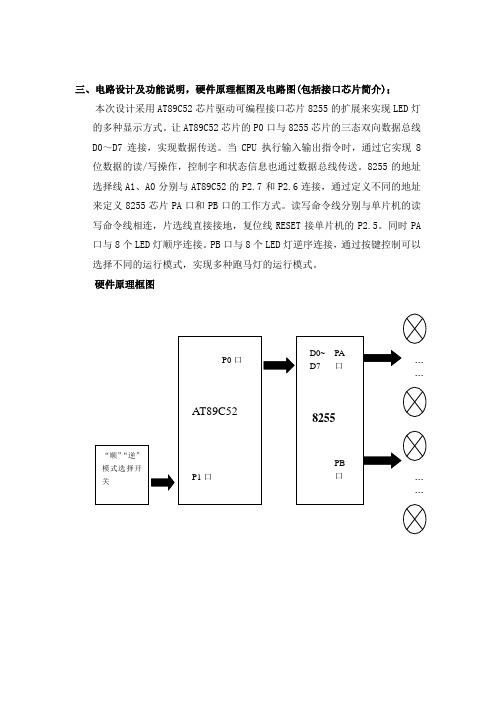
三、电路设计及功能说明,硬件原理框图及电路图(包括接口芯片简介);本次设计采用AT89C52芯片驱动可编程接口芯片8255的扩展来实现LED灯的多种显示方式。
让AT89C52芯片的P0口与8255芯片的三态双向数据总线D0~D7连接,实现数据传送。
当CPU 执行输入输出指令时,通过它实现8位数据的读/写操作,控制字和状态信息也通过数据总线传送。
8255的地址选择线A1、A0分别与AT89C52的P2.7和P2.6连接,通过定义不同的地址来定义8255芯片PA口和PB口的工作方式。
读写命令线分别与单片机的读写命令线相连,片选线直接接地,复位线RESET接单片机的P2.5。
同时PA 口与8个LED灯顺序连接。
PB口与8个LED灯逆序连接,通过按键控制可以选择不同的运行模式,实现多种跑马灯的运行模式。
硬件原理框图电路图接口芯片简介(1)AT89C52AT89C52是51系列单片机的一个型号,它是ATMEL公司生产的。
AT89C52是一个低电压,高性能CMOS 8位单片机,片内含8k bytes的可反复擦写的Flash只读程序存储器和256 bytes的随机存取数据存储器(RAM),器件采用ATMEL公司的高密度、非易失性存储技术生产,兼容标准MCS-51指令系统,片内置通用8位中央处理器和Flash存储单元,功能强大的AT89C52单片机可为您提供许多较复杂系统控制应用场合。
AT89C52有40个引脚,32个外部双向输入/输出(I/O)端口,同时内含2个外中断口,3个16位可编程定时计数器,2个全双工串行通信口,2个读写口线,AT89C52可以按照常规方法进行编程,但不可以在线编程(S系列的才支持在线编程)。
其将通用的微处理器和Flash存储器结合在一起,特别是可反复擦写的Flash存储器可有效地降低开发成本。
AT89C52有PDIP、PQFP/TQFP及PLCC等三种封装形式,以适应不同产品的需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
{ t=0; ldelay=1;//每次长时间的溢出,就置一个标记,以便主程序处理 } }
#define uchar unsigned char //定义一下方便使用 #define uint unsigned int #define ulong unsigned long #include <reg52.h> //包括一个 52 标准内核的头文件 sbit P10 = P1^0; //头文件中没有定义的 IO 就要自己来定义了 sbit P11 = P1^1; sbit P12 = P1^2; sbit P13 = P1^3; bit ldelay=0; //长定时溢出标记,预置是 0 uchar speed=10; //设置一个变量保存跑马灯的移动速度 char code dx516[3] _at_ 0x003b;//这是为了仿真设置的 //自动变速的跑马灯试验 void main(void) // 主程序 { uchar code ledp[4]={0xfe,0xfd,0xfb,0xf7};//预定的写入 P1 的值 uchar ledi; //用来指示显示顺序 RCAP2H =0x10; //赋 T2 的预置值 0x1000启动定时器 ET2=1; //打开定时器 2 中断 EA=1; //打开总中断 while(1) //主程序循环 { if(ldelay) //发现有时间溢出标记,进入处理 { ldelay=0; //清除标记 P1=ledp[ledi]; //读出一个值送到 P1 口 ledi++; //指向下一个 if(ledi==4) { ledi=0; //到了最后一个灯就换到第一个 speed--; if(speed==0)speed=10;//每循环显示一次,就调快一次溢出速度 } } } } //定时器 2 中断 timer2() interrupt 5 { static uchar t; TF2=0; t++; if(t==speed) //比较一个变化的数值,以实现变化的时间溢出