基于Matlab Simulink的车辆制动过程分析
基于Matlab/Simulink的汽车防抱死制动系统的仿真研究
Ab t a t M a h m a ia d l g a d is sm u a i n i n e f c i e m e h d t t d e il e f r n e sr c : t e tc lmo e i n t i l to s a fe t t o o s u y a v h ce p r o ma c . n v
Ke r s a t lc rk n y tm ; o eig; alb;i ua in ywod : n i o k b a ig s se M d l — n M ta sm lt o
汽 车 防 抱 死 制 动 系 统 ( t L c rk y — An i ok B a eS s — tm, S 是 汽 车 的一 种 主动 安 全 装 置 , 于 汽 车 e AB ) 用
T i p p r u igsd n a dt ee tbi me t f te t a mo e o S uigMalb/Smuik hs a e, s e a n h sa l h n mah mai l d l f n s o a c AB s t n a i l n
过程 , 很难 建立 精确 的数 学模 型 ; 随着计 算机 技术 和 软件 技术 的迅猛 发 展 , 真 技 术 已 成 为 国 内外 研 究 仿
的热 点 , 且在 汽 车研 发 中获 得 了广 泛 应用 。本 文 并
1 AB S数 学模 型
1 1 整车 模型 . 目前常 用 的整 车模 型有 四轮模 型 、 双轮 模 型 和 单 轮模 型 。 四轮 模 型 主要 描 述 复 杂 的动 力 学 性 能 , 如 横 向动力 学控制 模 拟 等 ; 轮 模 型 主要 描 述 车辆 双 的直线 驱动 , 如考 虑车 辆加 、 减速 对车辆 动力 学模拟
车辆自动紧急制动系统控制算法仿真分析

ε=
d - db dw - db
(1)
其中 d 为自车和前车相对距离; 当 ε>1 时,即 d > dw 则说明此时自车 处于安全状态;当 1>ε>0 时,即 dw > d > db ,则说明此时自车有和前车碰撞
的可能,需要启动预警功能,提醒驾
驶员及时制动避免碰撞的发生。当 0> ε 时,即 db > d ,则说明此时自车必须 要制动来避免碰撞发生,此时自动紧
TTC2 时启动报警策略,时间指标 TTC
小于 TTC1启动制动动作。
TTC =
dr vr
(2)
式中, dr 为主车与目标物的纵向
相对距离, vr 为主车与目标物的纵向 相对速度,雷达定义相对速度为目标 物的纵向速度减去主车的纵向速度。 dr 和 vr 可直接从环境感知系统输出 读取。
急制动系统需要快速介入,主动制动
避免碰撞的发生或者降低碰撞时自车
速度减少伤害。而对于Fra bibliotek于时距的判断方法,则
定义基于时间的指标 TTC,能够定量
的反应出在紧急情况下驾驶员及制动
系需要在该时间内完成制动操作,避
免碰撞发生。如图 2 是随着 TTC 的变
小,行车安全状态的变化情况。定义
时间指标阈值 TTC1、TTC2。在行车过 程中当计算出来的时间指标 TTC 小于
安全 安全区域
O
TTC1
TTC2
TTC
图 2 TTC 表征本车的安全状态
2 控制算法分析
根据以上制定的仿真方案,首先 需要确定的是 AEB 系统的控制算法。
(1) 安全状态判断 在制定 AEB 算法时首先应该判断 车辆当前状态下的危险情况,在判断 自车危险状态时一般有两种方法:其 一为基于车距的判断方法;另一为基 于时距的判断方法。基于车距的判断 方法如 Berkeley 模型,模型中定义报 警安全距离 dw 和制动安全距离 db , 定义危险系数
汽车ABS系统的建模和仿真

基于Matlab/Simulink的汽车建模与仿真摘要本文所研究的是基于Matlab/Simulink的汽车防抱死刹车系统(ABS)的仿真方法,本方法是利用了Simulink所提供的模块建立了整车的动力学模型,轮胎模型,制动系统的模型和滑移率的计算模型,采用的控制方法是PID控制器,对建立的ABS的数学模型进行了仿真研究,得到了仿真的曲线,将仿真曲线与与没有安装ABS系统的制动效果进行对比。
根据建立的数学模型分析,得到ABS系统可靠,能达到预期的效果。
关键词ABS 仿真建模防抱死系统PIDModeling and Simulation of ABS System of AutomobilesBased onMatlab/SimulinkAbstractA method for building a Simulator of ABS base on Matlab/Simulink is presented in this paper.The single wheel vehicle model was adopted as a research object in the paper. Mathematical models for an entire car, a bilinear tire model, a hydraulic brake model and a slip ratio calculation model were established in the Matlab/Simulink environment. The PID controller was designed. The established ABS mathematical model was simulated and researched and the simulation curves were obtained. The simulation results were compared with the results without ABS. The results show that established models were reliable and could achieve desirable brake control effects.Key wordsABS; control; modeling; simulation;Anti-lock Braking System; PID1.概述随着载重车辆动力性的不断提高,客观上也对车辆的制动性能与驱动性能提出了越来越高的要求。
基于Simulink 防抱死制动系统 (ABS) 系统仿真
THANKS
模型子系统、液压制动模型子系统、电机制动模型子系统。基于PID控制的ABS电动汽车单轮模型制动系统模
块的关系如图片所示
3
Simulink模型
2014
2015
2016
2017
车轮速度子系统
为了控制制动压力的变化率,该模型从期望的滑动量中减去实际滑动量,并将此信号 馈入 bang-bang 控制(+1 或 -1,具体取决于误差的符号,请参见上图 )。此开/关速 率通过一阶时滞,该时滞表示与制动系统的液压管路相关联的延迟,为施加到车轮上 的制动扭矩。
2
ABS防抱死系统原理
2 ABS的工作原理
ABS单轮模型
3
Simulink模型
3 simulink模型
添加项目
添加项目
单击编辑此项目的详 细内容
添加项目
添项目ห้องสมุดไป่ตู้
添加项目
单击编辑此项目的详
单击编辑此项目的详
细➢内在容理论分析的基础上,利用simulink对汽车防抱制动系统的各个子系统进行图形仿真建模,主要细包内括容单轮车辆
基于simulink模型 的车辆ABS系统
滑移率控制
CONTENTS
1 问题分析 2 ABS防抱死系统原理 3 simulink模型 4 仿真分析 5 结论
1
问题分析
1 问题分析
现状
在车辆紧急制动时,驾驶员踏板往往踩死, 这种情 况下,如果车轮抱死,车 轮与路面间 的侧向附着力将完全消失:如果只是前轮 转向 轮)先于后轮抱死, 汽车将失去转向能力;如 果只是后轮先于前轮抱死,汽车将产生侧滑( 甩尾)现象。ABS是提高汽车安全性能的主要 因素之一,对于 具有较高非线性的汽车制 动 过程,很难建立精确的数学模型。本文以轿 车为研究 对象,建立了ABS数 学模型,采用 Simulink仿真软件对ABS进行仿真。单击编辑副标题
基于MATLAB的汽车ABS制动过程仿真

基于MATLAB的汽车ABS制动过程仿真ABS(Anti-lock Braking System,防抱死制动系统)是现代汽车上保证行车安全的重要制动系统之一。
ABS制动系统可以避免在制动时车轮抱死,从而提高了制动效果和稳定性。
为了深入理解ABS制动系统的工作原理和性能,本文将基于MATLAB软件进行汽车ABS制动过程的仿真。
一、建立模型和假设为了实现ABS制动过程的仿真,需要建立一个基于MATLAB 的系统模型。
该系统模型需要考虑以下几个方面:1. 汽车的运动方程。
2. 轮胎与地面的接触力,即摩擦力。
3. 制动器与车轮的接触力。
4. ABS控制器的控制策略。
在仿真过程中,假设车辆在制动前以一定的速度匀速行驶,制动时四个车轮的制动和抱死状态是相同的。
二、模型搭建在MATLAB界面中,首先利用simulink模块搭建模型。
模型如下:模型中包含了车辆运动方程、轮胎地面接触力、制动器与车轮接触力等模块。
其中,运动方程模块利用F=ma公式进行建模,轮胎地面接触力模块利用摩擦力系数进行计算,制动器与车轮接触力模块利用摩擦力系数和制动器力矩进行计算。
在模型中,还有制动器控制器模块,负责制动器的控制与调节。
制动器控制器可以采用PID算法或滑模控制算法来控制制动器的开闭和力矩大小。
三、仿真过程在进行仿真过程中,需要确定以下参数:1. 初始车速度v0=80km/h。
2. 初始刹车踏板角度θ=0。
3. 制动器摩擦力系数μs=0.7。
4. 刹车片初期转动半径r=0.05m。
在进行仿真操作前,应先在程序中设定好各参数,再设定仿真时间和仿真步长。
由于ABS制动过程会使用到控制器,因此应首先进行控制器的设计和仿真。
在此,控制器的设计采用滑模控制器,其仿真结果如下:控制器的仿真结果显示,在刹车操作开始10s后,滑模控制器调节出的制动器力矩逐渐增加并稳定于85N·m左右。
随着控制器的调节,车轮抱死现象得以解决、保持ABS制动状态下使车辆具备更好的稳定性和制动效果。
基于Matlab/Simulink的车辆制动过程分析
I. - { 制 援 s
书 l 卜 霄 艇
() 4
在实 际情况 中, 由于制 动力 的存 在 , 车轮并 没有
做纯 滚动运 动 , 而是 以 山 做 滑 动滚动 , 时 的 山 此 总 是小 于 山 , 与 仿 真 出 来 的 结 论 一 致 ( 图 3所 这 如
车轮 和 路面之 间将 产生 打滑 现象 。用 滑 动率 来 衡 量 车轮 打滑 的程度 , 示如下 : 表
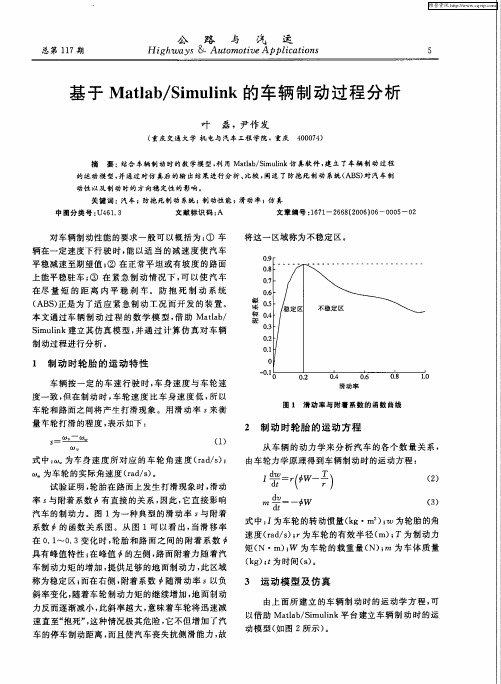
图 1 滑 动 率 与 附着 系数 的 函数 曲线
2 制动 时轮 胎 的 运动 方程
从 车 辆 的动 力 学来 分 析 汽 车 的各个 数 量 关 系 ,
式 中 : 为车 身速 度 所 对 应 的 车 轮 角速 度 (a / ) rd s ; 为 车轮 的实际 角 速度 (a / ) rd s 。 试验 证 明 , 轮胎 在 路面上 发生 打 滑现象 时 , 滑动
摘 要 :结合 车辆制 动时的数学模型 , 用 Mal / i l k仿真软 件, 利 t b Smui a n 建立 了车辆 制动过程
的运 动 模 型 , 通过 对仿 真 后 的 输 出结 果 进 行 分 析 、 较 . 述 了 防抱 死 制 动 系 统 ( B ) 汽 车 制 并 比 阐 A S对
。
釜
Smuik建 立其 仿真 模 型 , 通 过 计 算仿 真 对 车 辆 i l n 并
制 动过 程进行特 性
车 辆按 一定 的车 速 行 驶 时 , 身 速 度 与 车轮 速 车
度一 致 , 但在 制动 时 , 轮 速 度 比车身 速 度 低 , 以 车 所
车 的停车 制动距 离 , 而且使 汽车丧 失抗 侧 滑能力 , 故
维普资讯
基于Simulink的线控制动系统仿真
10.16638/ki.1671-7988.2021.08.023基于Simulink的线控制动系统仿真*刘凡,张鹏,延秋双,唐家宝(中国矿业大学(北京)机电与信息工程学院,北京100083)摘要:文章利用Solidworks软件对某型号线控制动系统进行装配体建模,分析了系统的工作原理和运动状态;利用ADAMS软件建立了该系统的动力学模型,并应用Simulink软件建立了其控制模型,最后在位移传感器的不同情况下对线控制动系统的线性助力阶段进行仿真验证。
结果表明,使用单位移传感器,可以准确检测输入力,并控制电机进行助力,系统位移控制达到设计要求。
关键词:线控制动系统;ADAMS;Simulink仿真中图分类号:U463.5 文献标识码:A 文章编号:1671-7988(2021)08-70-04Simulation of Brake-by-Wire System Based on Simulink*Liu Fan, Zhang Peng, Yan Qiushuang, Tang Jiabao(School of Mechanical Electronic and Information Engineering, China University of Mining andTechnology-Beijing, Beijing 100083)Abstract: The assembly model of Brake-by-Wire system was established by Solidworks software. The working principle and the motion status are analyzed. The dynamics model of Brake-by-Wire system is established by the utilization of Adams simulation platform. By building simulation control program in Matlab/Simulink environment, the assistance stage of system in different cases of displacement sensor is simulated and verified. The results show that the control system using the unit displacement sensor can accurately detect the input force and control the motor to assist, and the displacement meets the design requirements.Keywords: Brake-by-wire system; ADAMS; Simulink simulationCLC NO.: U463.5 Document Code: A Article ID: 1671-7988(2021)08-70-04前言汽车的制动性能直接关系到汽车的安全。
基于MatlabSimulink的电动汽车仿真模型设计与应用
基于MatlabSimulink的电动汽车仿真模型设计与应用一、本文概述随着全球能源危机和环境污染问题的日益严重,电动汽车作为一种清洁、高效的交通工具,受到了越来越多的关注和推广。
在电动汽车的研发过程中,仿真模型的建立与应用发挥着至关重要的作用。
本文旨在探讨基于Matlab/Simulink的电动汽车仿真模型设计与应用,旨在为电动汽车的设计、优化和控制提供理论支持和实践指导。
本文将对电动汽车仿真模型的重要性进行阐述,指出其在电动汽车研发过程中的地位和作用。
接着,将详细介绍Matlab/Simulink在电动汽车仿真模型设计中的应用,包括其强大的建模功能、灵活的仿真能力以及高效的算法处理能力等。
在此基础上,本文将重点讨论电动汽车仿真模型的设计方法。
包括电动汽车动力系统的建模、控制系统的建模以及整车模型的集成等。
将结合具体案例,对电动汽车仿真模型在实际应用中的效果进行展示和分析,以验证其有效性和可靠性。
本文还将对电动汽车仿真模型的发展趋势进行展望,探讨其在未来电动汽车研发中的潜在应用前景。
通过本文的研究,希望能够为电动汽车仿真模型的设计与应用提供有益的参考和启示,推动电动汽车技术的不断发展和进步。
二、电动汽车仿真模型设计基础电动汽车(EV)仿真模型的设计是一个涉及多个学科领域的复杂过程,其中包括电力电子、控制理论、车辆动力学以及计算机建模等。
在Matlab/Simulink环境中,电动汽车仿真模型的设计基础主要包括对车辆各子系统的理解和建模,以及如何利用Simulink提供的各种模块和工具箱进行模型的构建和仿真。
电动汽车的主要子系统包括电池管理系统(BMS)、电机控制系统(MCS)、车辆控制系统(VCS)以及车辆动力学模型。
这些子系统都需要根据实际的电动汽车设计和性能参数进行精确的建模。
电池管理系统(BMS)建模:电池是电动汽车的能源来源,因此,BMS建模对于电动汽车的整体性能至关重要。
BMS模型需要包括电池的荷电状态(SOC)估计、电池健康状况(SOH)监测、电池热管理以及电池能量管理等功能。
轿车制动性能仿真分析与计算
进行轿车制动性能的仿真分析和计算通常涉及以下步骤和考虑因素:
步骤一:建立轿车制动系统模型
1. 车辆参数收集:收集轿车相关参数,如质量、车轮半径、制动器类型等。
2. 制动系统建模:建立轿车制动系统的数学模型,包括制动盘、刹车片、制动液、制动缸等组成部分。
步骤二:制动力计算
1. 制动力分析:根据制动器和车速等参数计算制动力的大小。
2. 摩擦系数考虑:考虑轮胎与地面的摩擦系数,影响制动力的传递效果。
步骤三:制动距离仿真
1. 刹车距离计算:利用制动力和车辆动力学方程计算制动过程中的制动距离。
2. 不同情况考虑:考虑干燥、潮湿、结冰路面等不同路况对制动距离的影响。
步骤四:热力学分析
1. 制动系统热平衡:考虑制动过程中制动系统的热平衡问题,防止制动器过热失效。
2. 材料特性影响:考虑制动盘和刹车片材料的热特性对制动性能的影响。
步骤五:模拟验证与优化
1. 仿真验证:运用仿真软件(如ADAMS、Simulink等)进行制动性能的仿真验证。
2. 性能优化:根据仿真结果对制动系统进行优化设计,提高制动性能。
以上步骤涉及到多个领域的知识,包括车辆动力学、制动系统设计、热力学等。
在实际工程中,通常需要借助专业的仿真软件和工程计算工具来进行轿车制动性能的分析与计算。
MATLAB/Simulink在汽车防抱死系统仿真分析中的应用
MA S L B uik T A / i 在汽 车 防抱 死 系统 m l n
仿 真 分 析 中 的应 用
口 奇瑞汽车股份有限公司乘用车工程研究三院 黄 巨成 陈志鹏
一
、
引言
力开 始随 滑移 率 的增加 而迅 速增 加 ;
其基 本原 理就 是利 用车 轮 滑移率 的 门
汽车防抱死系统 ( 以下 简 称 A S) B
当 滑 移 率 增 至 某 值 Sp时 ,制 动 力 则 限值 及参 考滑 移 率设计 控 制逻辑 ,使 ot
对 于缩短 汽 车的 制动距 离 、增 加汽 车 随滑移率 的增加而迅 速减少 。公式1 说 得 车 轮 的 滑 移 率 保 持 在 峰 值 附 着 系 数 制动时 的方 向稳定 性 、减少 汽车 制 动 明 了车速 与轮 速 的关 系 :当滑移 率 为 附 近 ,从 而 获 得 最 大 的 地 面 制 动 力 和 过 程 中的侧 滑 以及 提高 汽 车制 动时 的 1 , 车 速 与 轮 速 相 等 ;当 滑 移 率 为 0 最 小的 制动距 离 。 同时获 得较 大的侧 时 安全 性具 有 非常 重要 的意义 。开 发汽 时 ,车轮 已经 处于 抱死 状 态。车 轮抱 向 力 ,保 证制 动 时的侧 向稳 定性 ,汽 车 的A S B 需要通过大量的实车试验来确 B 的基 本工作原理如图2 所示 。 死滑 移时 ,不 仅 制动 力减 少 ,制动强 车A S 定汽车A S 8 系统的结构与工作参数 ,也 度 降 低 , 而 且 车 轮 侧 向 附 着 力 也 大 大 可 以通 过 对 汽 车 A S 统 的 仿 真 研 究 初 B系 减 少 。 因此 ,当前轮 抱 死滑 移 时 ,车 步 确 定 A S 统 的 参 数 ,再 确 定 实 际 汽 8系 、 辆 丧 失 转 向 能 力 ; 而 后 轮 抱 死 滑 移 则 车A 系统 的结构。通过少量的试验验 S B -一 证 发 现 ,后 一 种 方 法 需 要 付 出 小 的 代 属 于不 稳定 工况 ,易引起 车辆 急速 甩