(完整word版)MATLABsimulink中的基本模块的参数、含义、应用..
MATLAB-SIMULINK讲解完整版
第3章 SIMULINK应用基础
(1) 文件管理类:包括 4 个按键,分别是按键 、按键 和按键 。
(2) 对象管理类:包括 3 个按键,分别是按键 和按键 。
、按键 、按键
(3) 命令管理类:包括 2 个按键,分别是按键 和按键 。
(4) 仿真控制类:包括 6 个按键、1 个文本框、1 个列表
框,分别是按键 、按键 如图3-6所示,在模型中加入注释文字,使模型更具可 读性。
图3-6 添加注释文字示例 (a) 未加注释文字;(b) 加入注释文字
第3章 SIMULINK应用基础
3.2.3 子系统的建立与封装 1. 子系统的建立 一般而言,电力系统仿真模型都比较复杂,规模很大,
包含了数量可观的各种模块。如果这些模块都直接显示在 SIMULINK仿真平台窗口中,将显得拥挤、杂乱,不利于用 户建模和分析。可以把实现同一种功能或几种功能的多个模 块组合成一个子系统,从而简化模型,其效果如同其它高级 语言中的子程序和函数功能。
、列 表框
、按键 、按键 和按键 。 (5) 窗口切换类:包括 6 个按键,分别是按键 、按键 、按键 、按键 和按键 。
、按键
工具栏中各个工具图标及其功能说明见附录 B。
第3章 SIMULINK应用基础
3.2 SIMULINK的基本操作
3.2.1 模块及信号线的基本操作 1. 模块的基本操作 模块是系统模型中最基本的元素,不同模块代表了不同
增强模型的可读性
签内容,在标签编辑框外的窗口中单击鼠标退出
第3章 SIMULINK应用基础
3.2.2 系统模型的基本操作 除了熟悉模块和信号线的基本操作方法,用户还需熟悉
SIMULINK系统模型本身的基本操作,包括模型文件的创建、 打开、保存以及模型的注释等。
Matlab-Simulink基本模块操作
第2章 Simulink模块操作
表 2-2 控制模块方块图的参数
参数
定义
ScreenColor BackgroundColor
模型方块 图的背景色 模块和标 注的背景色
Fore groun dColor
模块和标 注的前景色
第2章 Simulink模块操作
用户可以把这些参数设置为如下任一值: 'black','white','red','green','blue','cyan','magenta',
第2章 Simulink模块操作
Simulink模块操作
2.1 模块操作 2.2 改变模块外观 2.3 设置模块参数 2.4 标注方块图 2.5 模块属性对话框 2.6 显示模块输出 2.7 控制和显示模块的执行顺序 2.8 查表编辑器 2.9 鼠标和键盘操作概述
第2章 Simulink模块操作
2.1 模 块 操 作
2.1.1 Simulink模块类型 用户在创建模型时必须知道,Simulink把模块分为两种
类型:非虚拟模块和虚拟模块。非虚拟模块在仿真过程中起 作用,如果用户在模型中添加或删除了一个非虚拟模块,那 么Simulink会改变模型的动作方式;相比而言,虚拟模块在 仿真过程中不起作用,它只是帮助以图形方式管理模型。此 外,有些Simulink模块在某些条件下是虚拟模块,而在其他 条件下则是非虚拟模块,这样的模块称为条件虚拟模块。表 2-1列出了Simulink中的虚拟模块和条件虚拟模块。
第2章 Simulink模块操作 图2-10
第2章 Simulink模块操作
2.2.3 指定方块图颜色 Simulink允许用户在方块图中指定任何模块或标注的前景色
simulink模块属性设置及功能介绍
第 7 章 Simulink的应用
图7.2库模块浏览器
图7.3 新建的空白模块窗口
第 7 章 Simulink的应用
7.2
Simulink的仿真原理
7.2.1 Simulink仿真模块
通常,Simulink仿真系统包括输入(Input)、状态(states)和输出(Output)三个部分。
· 输入模块:即信号源模块,包括常数字信号源和用户自定义信号; · 状态模块:即被模拟的系统模块,是系统建模的核心和主要部分; · 输出模块:即信号显示模块,它能够以图形方式、文件格式进行显示。 注意:在设计一个模型时,必须先确定这三个部分的意,以及它们之间的联系; Simulink的仿真模型并非一定要完全包括这三个部分,它可以缺少其中一个或者两个;
matlab中-simulink的应用

▪ 例10.1.2:实现两个正弦信号的相乘。
2024年6月5日
9
10.2 模型的创建和模型文件
10.2.1 SIMULINK 模型是什么?
▪ SIMULINK 模型有以下几层含义:
• 在视觉上表现为直观的方框图;
• 在文件上则是扩展名为 mdl 的ASCII代码;
例10.1.2:实现两个正弦信号的相乘。
2024年6月5日
26
10.3 仿真运行(续1)
10.3.2 通过命令行运行仿真 ▪ 通过命令行运行仿真与通过菜单运行仿真相比 ,有如下的 一些优点:
• 可以不理睬模块中的初始条件(参数 x0 );
• 可以定义任何外部输入(用参数 ut );
• 可以由一个M 文件来启动一个仿真,并且允许模块中的 参数发生改变 。
信号线的分支和折曲 分支的产生 信号线的折曲 折点的移动
2024年6月5日
返回
17
(1)解参数的设置(Solver)
2024年6月5日
18
(2)仿真数据的输入输出设置(Workspace I/O)
2024年6月5日
19
(3)仿真中异常情况的诊断(Diagnostics) 返回
2024年6月5日
Simulink提供建立系统模型、选择仿真参数和 数值算法、启动仿真程序对该系统进行仿真、设 置不同的输出方式来观察仿真结果等功能。
2024年6月5日
2
1.交互式、图形化的建模环境
Simulink提供了丰富的模块库以帮助用户快速地建立 动态系统模型。建模时只需使用鼠标拖放不同模块库 中的系统模型并将它们连接起来。它外表以方块图形 式呈现,且采用分层结构。
MATLAB_Simulink

Simulink建模仿真笔记主要参考书目:《MATLAB程序设计教程》电子版《Simulink建模与仿真》:姚俊马松辉著,西安电子科技大学出版社《SFunction的编写》:恒润科技《MATLAB基础与应用》:张平等,北京航空航天大学出版社目录●常用器件 (4)●>>clc (4)●快捷键 (4)●Format (4)●nargin和nargout (4)●取整函数 (4)●编程和数据类型 (4)数据类型(数值类型) (4)数据类型(结构) (5)数据类型(细胞数组) (6)数据类型(地图容器对象) (6)数据类型(函数句柄) (7)数据类型(Java类和对象) (7)数据类型(数据类型识别) (7)数据类型转换(数字) (8)数据类型转换(字符串为数字) (8)数据类型转换(数字为字符) (8)数据类型转换(其他转换) (9)操作数和特殊字符(算术运算符) (9)操作数和特殊字符(关系运算符) (9)操作数和特殊字符(逻辑运算) (10)操作数和特殊字符(特殊字符) (10)字符串(字符在MATLAB 的叙述) (10)字符串(字符串设定) (10)字符串(字符串识别) (10)字符串(字符串操作) (11)字符串(字符串解析) (11)字符串(字符串评价) (11)字符串(字符串比较) (11)Bit-Wise 操作 (11)关联操作 (12)集合运算 (12)日期和时间操作 (12)在MATLAB编程(函数和脚本) (13)在MATLAB编程(赋值) (13)在MATLAB编程(定时器) (14)在MATLAB编程(变量和函数在内存中) (14)在MATLAB编程(控制流) (15)在MATLAB编程(错误处理) (15)在MATLAB编程(MEX 编程) (16)●MATLAB的基本绘图命令 (16)●Scope技术 (19)●Matlab计时 (20)●Simulink中对仿真方法及步长的设置 (21)●Simulink的调试技术 (22)●Simulink系统仿真原理 (25)Simulink求解器概念 (25)系统过零的概念与解决方案 (26)系统代数环的概念与解决方案 (27)高级积分器 (27)仿真参数设置:高级选项与诊断选项 (29)●Simulink子系统技术 (31)Simulink简单子系统技术 (31)Simulink高级子系统技术 (33)Simulink的子系统封装技术 (36)Simulink模块库技术 (37)●Simulink命令行仿真技术 (38)使用命令行方式建立系统模型 (38)使用命令行方式进行动态系统仿真 (39)使用MATLAB脚本分析动态系统 (39)其它内容 (39)●M函数编程基础 (39)顺序结构 (39)循环结构 (40)函数文件 (41)函数调用 (41)函数参数的可调性 (41)●M文件: (41)●文件操作 (42)●连续系统离散化 (43)●在编写S函数时,注意接口的连接 (44)●在MA TLAB 命令 (44)●与S函数一些相关的概念: (44)直接馈通(Direct feedthrough) (44)动态输入(Dynamically sized inputs) (44)●C语言编写S函数 (47)1. 初始化 (49)2. 用户输入和输出 (50)3. 使用参数 (51)4. 使用状态 (51)●S-function Builder: (55)●GUI-图形用户界面 (56)●曲线拟合与插值运算 (57)曲线拟合 (57)插值运算 (58)●快速傅里叶变换 (59)●GUI图形用户界面编程 (60)●在GUI中调用Simulink模型 (60)常用器件分离器(Demux);整合器(MUX)>>clc%清除命令窗口的命令快捷键在使用Simulink时,R键位放大功能;V键为缩小功能;空格键为适中。
Simulink常用库模块介绍 Matlab a
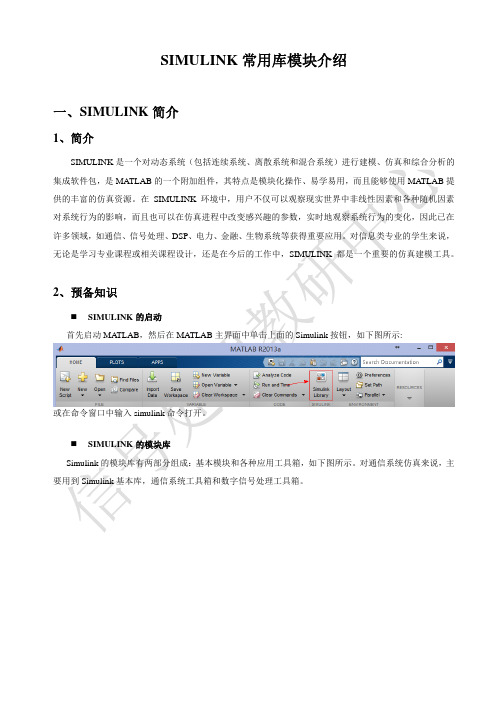
SIMULINK常用库模块介绍一、SIMULINK简介1、简介SIMULINK是一个对动态系统(包括连续系统、离散系统和混合系统)进行建模、仿真和综合分析的集成软件包,是MATLAB的一个附加组件,其特点是模块化操作、易学易用,而且能够使用MATLAB提供的丰富的仿真资源。
在 SIMULINK环境中,用户不仅可以观察现实世界中非线性因素和各种随机因素对系统行为的影响,而且也可以在仿真进程中改变感兴趣的参数,实时地观察系统行为的变化,因此已在许多领域,如通信、信号处理、DSP、电力、金融、生物系统等获得重要应用。
对信息类专业的学生来说,无论是学习专业课程或相关课程设计,还是在今后的工作中,SIMULINK都是一个重要的仿真建模工具。
2、预备知识⏹SIMULINK的启动首先启动MATLAB,然后在MATLAB主界面中单击上面的Simulink按钮,如下图所示:或在命令窗口中输入simulink命令打开。
⏹SIMULINK的模块库Simulink的模块库有两部分组成:基本模块和各种应用工具箱,如下图所示。
对通信系统仿真来说,主要用到Simulink基本库,通信系统工具箱和数字信号处理工具箱。
二、SIMULINK的模块库1、SIMULINK基本库(1)连续模块Continuous名称功能说明Derivative 微分Integrator 积分器Integrator Limited 定积分Integrator, Second-Order 二阶积分Integrator, Second-Order Limited 二阶定积分PID Controller PID控制器PID Controller (2DOF) PID控制器State-Space 状态空间Transfer Fcn 传递函数Transport Delay 传输延时Variable Transport Delay 可变传输延时Zero-Pole 零—极点增益模型(2)非连续模块Discontinuous名称功能说明Backlash 间隙非线性Coulomb&Viscous Friction 库仑和黏度摩擦非线性Dead Zone 死区非线性Dead Zone Dynamic 动态死区非线性Hit Crossing 冲击非线性Quantizer 量化非线性Rate Limiter 静态限制信号的变化速率Rate Limiter Dynamic 动态限制信号的变化速率Relay 滞环比较器,限制输出值在某一范围内变化Saturation 饱和输出,让输出超过某一值时能够饱和Saturation Dynamic 动态饱和输出Wrap To Zero 还零非线性(3)离散模块Discrete名称功能说明Delay 延时器Difference 差分环节Discrete Derivative 离散微分环节Discrete FIR Filter 离散FIR滤波器Discrete Filter 离散滤波器Discrete PID Controller 离散PID控制器Discrete PID Controller (2DOF) 离散PID控制器Discrete State-Space 离散状态空间系统模型Discrete Transfer-Fcn 离散传递函数模型Discrete Zero-Pole 以零极点表示的离散传递函数模型Discrete-time Integrator 离散时间积分器First-Order Hold 一阶保持器Memory 输出本模块上一步的输入值Tapped Delay 延迟Transfer Fcn First Order 离散一阶传递函数Transfer Fcn Lead or Lag 传递函数Transfer Fcn Real Zero 离散零点传递函数Unit Delay 一个采样周期的延迟Zero –Order Hold 零阶保持器(4)逻辑和位操作模块Logic and Bit Operations名称功能说明Bit Clear 位清零Bit Set 位置位Bitwise Operator 逐位操作Combinatorial Logic 组合逻辑Compare To Constant 和常量比较Compare To Zero 和零比较Detect Change 检测跳变Detect Decrease 检测递减Detect Fall Negative 检测负下降沿Detect Fall Nonpositive 检测非负下降沿Detect Increase 检测递增Detect Rise Nonnegative 检测非负上升沿Detect Rise Positive 检测正上升沿Extract Bits 提取位Interval Test 检测开区间Interval Test Dynamic 动态检测开区间Logical Operator 逻辑操作符Relational Operator 关系操作符Shift Arithmetic 移位运算(5)查找表模块Lookup Table名称功能说明1-D Lookup Table 一维输入信号的查询表(线性峰值匹配)2-D Lookup Table 两维输入信号的查询表(线性峰值匹配)Cosine 余弦函数查询表Direct Lookup Table (n-D) N个输入信号的查询表(直接匹配)Interpolation using PreLookup 输入信号的预插值Lookup Table Dynamic 动态查询表PreLookup 预查询索引搜索Sine 正弦函数查询表n-D Lookup Table N维输入信号的查询表(线性峰值匹配)(6)数学模块Math Operations名称功能说明Abs 取绝对值Add 加法Algebraic Constraint 代数约束Assignment 赋值Bias 偏移Complex to Magnitude-Angle 由复数输入转为幅值和相角输出Complex to Real-Imag 由复数输入转为实部和虚部输出Divide 除法Dot Product 点乘运算Find Nonzero Elements 查找非零元素Gain 比例运算Magnitude-Angle to Complex 由幅值和相角输入合成复数输出Math Function 包括指数函数、对数函数、求平方、开根号等常用数学函数Matrix Concatenation 矩阵级联MinMax 最值运算MinMax Running Resettable 最大最小值运算Permute Dimensions 按维数重排Polynomial 多项式Product 乘运算Product of Elements 元素乘运算Real-Imag to Complex 由实部和虚部输入合成复数输出Reciprocal Sqrt 开平方后求倒Reshape 取整Rounding Function 舍入函数Sign 符号函数Signed SqrtSine Wave Function 正弦波函数Slider Gain 滑动增益Sqrt 平方根Squeeze 删去大小为1 的"孤维"Subtract 减法Sum 求和运算Sum of Elements 元素和运算Trigonometric Function 三角函数Unary Minus 一元减法Vector ConcatenateWeighted Sample Time Math 权值采样时间运算(7)模型检测模块Model Verification名称功能说明Assertion 确定操作Check Dynamic Gap 检查动态偏差Check Dynamic Range 检查动态范围Check Static Gap 检查静态偏差Check Static Range 检查静态范围Check Discrete Gradient 检查离散梯度Check Dynamic Lower Bound 检查动态下限Check Dynamic Upper Bound 检查动态上限Check Input Resolution 检查输入精度Check Static Lower Bound 检查静态下限Check Static Upper Bound 检查静态上限(8)模型扩充模块Model-Wide Utilities名称功能说明Block Support Table 功能块支持的表DocBlock 文档模块Model Info 模型信息Timed-Based Linearization 时间线性分析Trigger-Based Linearization 触发线性分析(9)端口和子系统模块Ports&Subsystems名称功能说明Atomic Subsystem 单元子系统CodeReuseSubsystem 代码重用子系统Configurable Subsystem 可配置子系统Enable 使能Enabled Subsystem 使能子系统Enabled and Triggered Subsystem 使能和触发子系统For Each Subsystem For Each子系统For Iterator Subsystem For迭代子系统Function-Call Feedback Latch 函数调用反馈锁存Function-Call Generator 函数调用生成器Function-Call Split 函数调用切换Function-Call Subsystem 函数调用子系统If If操作If Action Subsystem If操作子系统In1 输入端口Model 模型Model Variants 模型变种Out1 输出端口Subsystem 子系统Subsystem Examples 子系统例子Switch Case Switch Case语句Switch Case Action Subsystem Switch Case 操作子系统Trigger 触发操作Triggered Subsystem 触发子系统Variant SubsystemWhile Iterator Subsystem While迭代子系统(10)信号属性模块Signal Attributes名称功能说明Bus to Vector 总线到矢量转换Data Type Conversion 数据类型转换Data Type Conversion Inherited 数据类型继承Data Type Duplicate 数据类型复制Data Type Propagation 数据类型传播Data Type Propagation Examples 数据类型传播示例Data Type Scaling Strip 数据类型缩放IC 信号输入属性Probe 探针点Rate Transition 速率转换Signal Conversion 信号转换Signal Specification 信号特征指定Weighted Sample Time 加权的采样时间Width 信号宽度(11)信号线路模块Signal Routing名称功能说明Bus Assignment 总线分配Bus Creator 总线生成Bus Selector 总线选择Data Store Memory 数据存储Data Store Read 数据存储读取Data Store Write 数据存储写入Demux 分路Environment Controller 环境控制器From 信号来源Goto 信号去向Goto Tag Visibility Goto标签可视化Index Vector 索引矢量Manual Switch 手动选择开关Merge 信号合并Multiport Switch 多端口开关Mux 合路Selector 信号选择器Switch 开关选择,当第二个输入端大于临界值时,输出由第一个输入端而来,否则输出由第三个输入端而来Vector Concatenate 矢量拼接(12)接收器模块Sinks名称功能说明Display 数字显示器Floating Scope 浮动示波器Out1 输出端口Scope 示波器Stop Simulation 停止仿真Terminator 终止符号(To File 将输出数据写入数据文件保护To Workspace 将输出数据写入MATLAB的工作空间XY Graph 显示二维图形(13)输入源模块Sources名称功能说明Band-Limited White Noise 带限白噪声Chirp Signal 产生一个频率不断增大的正弦波Clock 显示和提供仿真时间Constant 常数信号Counter Free-Running 无限计数器Counter Limited 有限计数器Digital Clock 数字时钟Enumerated Constant 枚举常量From File 来自文件From Workspace 来自MATLAB的工作空间Ground 接地In1 输入信号Pulse Generator 脉冲发生器Ramp 斜坡输入Random Number 产生正态分布的随机数Repeating Sequence 产生规律重复的任意信号Repeating Sequence Interpolated 重复序列内插值Repeating Sequence Stair 重复阶梯序列Signal Builder 信号创建器Signal Generator 信号发生器,可产生正弦、方波、锯齿波及随意波Sine Wave 正弦波信号Step 阶跃信号Uniform Random Number 均匀分布随机数(14)用户自定义函数模块User-Defined Functions名称功能说明Fcn 用自定义的函数(表达式)进行运算Interpreted MATLAB Function 解释的Matlab函数Level-2 MATLAB S-Function 二级Matlab S函数MATLAB Function 利用MATLAB的现有函数进行运算S-Function 调用自编的S函数的程序进行运算S-Function Builder S函数创建S-Function Examples S函数例子2、通信系统工具箱Communication System Toolbox(1)信道 Channel名称功能说明AWGN Channel 加性高斯白噪声信道Binary Symmetric Channel 二进制对称信道Multipath Rayleigh Fading Channel 多径瑞利衰落信道Multipath Rician Fading Channel 多径莱斯衰落信道(2)通信滤波器 Comm Fliter名称功能说明Gaussian Filter 高斯滤波器Integrate and Dump 积分清零Raised Cosine Transmit Filter 升余弦发送滤波器Ideal Rectangular Pulse Filter 理想矩形脉冲滤波器Raised Cosine Receive Filter 升余弦接收滤波器Windowed Integrator 窗积分器(3)通信信宿Comm Sinks名称功能说明Discrete-Time Eye Diagram Scope 离散时间眼图示波器Discrete-Time Signal Trajectory Scope 离散时间信号轨迹示波器Discrete-Time Scatter Plot Scope 离散时间散点图示波器Error Rate Calculation 误码率计算(4)通信信源Comm Sources1)噪声发生器Noise Generators名称功能说明Gaussian Noise Generator 高斯噪声发生器Rayleigh Noise Generator 瑞利噪声发生器Rician Noise Generator 莱斯噪声发生器Uniform Noise Generator 均匀噪声发生器2)随机数据源Random Data Sources名称功能说明Bernoulli Binary Generator 伯努利二进制发生器Random Integer Generator 随机整数发生器Poisson Integer Generator 泊松整数发生器3)序列发生器Sequence Generators名称功能说明Barker Code Generator 巴克码发生器Hadamard Code Generator Hadamard码发生器OVSF Code Generator OVSF码发生器Walsh Code Generator 沃尔什码发生器Gold Sequence Generator Gold序列发生器Kasami Sequence Generator Kasami序列发生器PN Sequence Generator PN序列发生器(5)检错与纠错Error Detection and Correction3)卷积码Convolutional名称功能说明APP Decoder APP译码器Turbo Decoder Turbo译码器Viterbi Decoder 维特比译码器Convolutional Encoder 卷积码编码器Turbo Encoder Turbo编码器(6)调制Modulation1)模拟调制Analog Passband Modulation名称功能说明DSB AM Demodulator Passband 双边带调幅解调器DSBSC AM Demodulator Passband 抑制载波调幅解调器FM Demodulator Passband FM解调器PM Demodulator Passband PM解调器SSB AM Demodulator Passband 单边带调幅解调器DSB AM Modulator Passband 双边带调幅调制器DSBSC AM Modulator Passband 抑制载波调幅调制器FM Modulator Passband FM调制器PM Modulator Passband PM调制器SSB AM Modulator Passband 单边带调幅调制器2)数字调制Digital Passband Modulation①调幅AM名称功能说明General QAM Demodulator Baseband 通用QAM解调基带M-PAM Demodulator Baseband M-PAM解调基带Rectangular QAM Demodulator Baseband矩形QAM解调基带General QAM Modulator Baseband 通用QAM调制器基带M-PAM Modulator Baseband M-PAM调制器基带Rectangular QAM Modulator Baseband 矩形QAM调制基带② CPM名称功能说明CPFSK Demodulator Baseband CPFSK解调器CPM Demodulator Baseband CPM解调器GMSK Demodulator Baseband GMSK解调器MSK Demodulator Baseband MSK解调器CPFSK Modulator Baseband CPFSK调制器CPM Modulator Baseband CPM调制器GMSK Modulator Baseband GMSK调制器MSK Modulator Baseband MSK调制器③ FM名称功能说明M-FSK Demodulator Baseband M-FSK解调器M-FSK Modulator Baseband M-FSK调制器④ PM名称功能说明BPSK Demodulator Baseband BPSK 解调器DBPSK Demodulator Baseband DBPSK解调器DQPSK Demodulator Baseband DQPSK解调器M-DPSK Demodulator Baseband M-DPSK解调器M-PSK Demodulator Baseband M-PSK解调器OQPSK Demodulator Baseband OQPSK 解调器QPSK Demodulator Baseband QPSK解调器BPSK Modulator Baseband BPSK 调制器DBPSK Modulator Baseband DBPSK调制器DQPSK Modulator Baseband DQPSK调制器M-DPSK Modulator Baseband M-DPSK调制器M-PSK Modulator Baseband M-PSK调制器OQPSK Modulator Baseband OQPSK调制器QPSK Modulator Baseband QPSK调制器⑤ TCM名称功能说明General TCM Decoder 通用TCM解码器M-PSK TCM Decoder M-PSK TCM解码器Rectangular QAM TCM Decoder 矩形QAM TCM解码器General TCM Encoder 通用TCM编码器M-PSK TCM Encoder M-PSK TCM编码器Rectangular QAM TCM Encoder 矩形QAM TCM编码器3、DSP系统工具箱DSP System Toolbox(1)信号管理 Signal Management1)缓存 Buffers名称功能说明Buffer 缓存(串并转换)Delay Line 延迟线Queue 队列寄存器(FIFO)Stack 堆栈Unbuffer 解缓存(并串转换)2)信号属性 Signal Attributes名称功能说明Check Signal Attributes 信号属性校验Convert 1-D to 2-D 1维到2维转换Convert 2-D to 1-D 2维到1维转换Data Type Conversion 数据类型转换Frame Conversion 帧信号和采样信号转换Inherit Complexity 实数、复数类型继承(2)信号操作 Signal Operations名称功能说明Constant Ramp 常数斜升信号Convolution 卷积Delay 延迟Downsample 下采样Interpolation 内插NCO 数控振荡器NCO HDL Optimized HDL优化的NCOOffset 数据偏移Pad 头部或尾部添补数据Peak Finder 峰值搜索器Repeat 重复Sample and Hold 采样保持Triggered Signal From Workspace 触发的工作空间信号Unwrap 相位不连续处理Upsample 上采样Variable Fractional Delay 可变分数延迟Variable Integer Delay 可变整数延迟Window function 窗函数Zero Crossing 零交叉检验(2)输出 Sinks名称功能说明Display 数据显示Matrix Viewer 矩阵观察器Signal to Workspace 输出信号到工作空间Spetrum Analyzer 频谱分析仪Time Scope 时域示波器To Audio Device 输出到音频设备To Multimedia 输出到多媒体Triggered To Workspace 触发输出到工作空间UDP Send UDP发送Vector Scope 矢量示波器Waterfall 多矢量数据示波器。
MATLAB中SIMULINK常用命令表+常用模块简介
常用命令:仿真命令sim 仿真运行一个simulink模块sldebug 调试一个simulink模块simset 设置仿真参数simget 获取仿真参数线性化和整理命令linmod 从连续时间系统中获取线性模型linmod2 也是获取线性模型,采用高级方法dinmod 从离散时间系统中获取线性模型trim 为一个仿真系统寻找稳定的状态参数构建模型命令open_system 打开已有的模型close_system 关闭打开的模型或模块new_system 创建一个新的空模型窗口load_system 加载已有的模型并使模型不可见save_system 保存一个打开的模型add_block 添加一个新的模块add_line 添加一条线(两个模块之间的连线)delete_block 删除一个模块delete_line 删除一根线find_system 查找一个模块hilite_system 使一个模块醒目显示replace_block 用一个新模块代替已有的模块set_param 为模型或模块设置参数get_param 获取模块或模型的参数add_param 为一个模型添加用户自定义的字符串参数delete_param 从一个模型中删除一个用户自定义的参数bdclose 关闭一个simulink窗口bdroot 根层次下的模块名字gcb 获取当前模块的名字gcbh 获取当前模块的句柄gcs 获取当前系统的名字getfullname 获取一个模块的完全路径名slupdate 将1.x的模块升级为3.x的模块addterms 为未连接的端口添加terminators模块boolean 将数值数组转化为布尔值slhelp simulink的用户向导或者模块帮助封装命令hasmask 检查已有模块是否封装hasmaskdlg 检查已有模块是否有封装的对话框hasmaskicon 检查已有模块是否有封装的图标iconedit 使用ginput函数来设计模块图标maskpopups 返回并改变封装模块的弹出菜单项movemask 重建内置封装模块为封装的子模块库命令libinfo 从系统中得到库信息诊断命令sllastdiagnostic 上一次诊断信息sllasterror 上一次错误信息sllastwarning 上一次警告信息sldiagnostics 为一个模型获取模块的数目和编译状态硬拷贝和打印命令frameedit 编辑打印画面print 将simulink系统打印成图片,或将图片保存为m文件printopt 打印机默认设置orient 设置纸张的方向常用Simulink模块简介Sources库中模块Band-Limited white Noise 给连续系统引入白噪声Chirp Signal 产生一个频率递增的正弦波(线性调频信号)Clock 显示并提供仿真时间Constant 生成一个常量值Counter Free-Running 自运行计数器,计数溢出时自动清零Counter Limited 有限计数器,可自定义计数上限Digital Clock 生成有给定采样间隔的仿真时间From File 从文件读取数据From Workspace 从工作空间中定义的矩阵中读取数据Ground 地线,提供零电平Pulse Generator 生成有规则间隔的脉冲In1 提供一个输入端口Ramp 生成一连续递增或递减的信号Random Number 生成正态分布的随机数Repeating Sequence 生成一重复的任意信号Repeating Sequence Interpolated 生成一重复的任意信号,可以插值Repeating Sequence Stair 生成一重复的任意信号,输出的是离散值Signal Builder 带界面交互的波形设计Signal Generator 生成变化的波形Sine Wave 生成正弦波Step 生成一阶跃函数Uniform Random Number 生成均匀分布的随机数Sink库中模块Display 显示输入的值Floating Scope 显示仿真期间产生的信号,浮点格式Out1 提供一个输出端口Scope 显示仿真期间产生的信号Stop Simulation 当输入为非零时停止仿真Terminator 终止没有连接的输出端口To File 向文件中写数据To Workspace 向工作空间中的矩阵写入数据XY Graph 使用Matlab的图形窗口显示信号的X-Y图Discrete库中的模块Difference 差分器Difference Derivative 计算离散时间导数Discrete Filter 实现IIR和FIR滤波器Discrete State-Space 实现用离散状态方程描述的系统Discrete Transfer Fcn 实现离散传递函数Discrete Zero-Pole 实现以零极点形式描述的离散传递函数Discrete-time Integrator 执行信号的离散时间积分First-Order Hold 实现一阶采样保持Integer Delay 将信号延迟多个采样周期Memory 从前一时间步输出模块的输入Tapped Delay 延迟N个周期,然后输出所有延迟数据Transfer Fcn First Order 离散时间传递函数Transfer Fcn Lead or Lag 超前或滞后传递函数,主要有零极点树木决定Transfer Fcn Real Zero 有实数零点,没有极点的传递函数Unit Delay 将信号延迟一个采样周期Weighted Moving Average 加权平均Zero-Order Hold 零阶保持Continuous库中的各模块Derivative 输入对时间的导数Integrator 对信号进行积分State-Space 实现线性状态空间系统Transfer Fcn 实现线性传递函数Transfer Delay 以给定的时间量延迟输入V ariable Transfer Delay 以可变的时间量延迟输入Zero-Pole 实现用零极点形式表示的传递函数Discontinuities库中的各模块Backlash 模拟有间隙系统的行为Coulomb & Viscous Friction 模拟在零点出不连续,在其他地方有线性增益的系统Dead Zone 提供输出为零的区域Dead Zone Dynamic 动态提供输出为零的区域Hit Crossing 检测信号上升沿、下降沿以及与指定值得比较结果,输出零或一Quantizer 以指定的间隔离散化输入Rate Limiter 限制信号的变化速度Relay 在两个常数中选出一个作为输出Saturation 限制信号的变化范围Saturation Dynamic 动态限制信号的变化范围Wrap to Zero 输入大于门限则输出零,小于则直接输出Math 库中的模块Abs 输出输入的绝对值Add 对信号进行加法或减法运算Algebraic Constant 将输入信号抑制为零Assignment 赋值Bias 给输入加入偏移量Complex to Magnitude-Angle 输出复数输入信号的相角和幅值Complex to Real-Image 输出复数输入信号的实部和虚部Divide 对信号进行乘法或除法运算Dot Product 产生点积Gain 将模块的输入乘以一个数值Magnitude-Angle to Complex 由相角和幅值输入输出一个复数信号Math Function 数学函数Matrix Concatenation 矩阵串联MinMax 输出信号的最小或最大值MinMax Running Resettable 输出信号的最小或最大值,带复位功能Polynomial 计算多项式的值Product 产生模块各输入的简积或商Product of Elements 产生模块各输入的简积或商Real-Imag to Complex 由实部和虚部输入输出复数信号Reshape 改变矩阵或向量的维数Rounding Function 执行圆整函数Sign 指明输入的符号Sine Wave Function 输出正弦信号Slider Gain 使用滑动器改变标量增益Subtract 对信号进行加法或减法运算Sum of Elements 生成输入的和Trigonometric Function 执行三角函数Unary Minus 对输入取反Weighted Sample Time Math 对信号经过加权时间采样的值进行加、减、乘、除运算。
Matlab-Simulink各模块对应的中文名称及介绍

这些图片的窗口是从MATLAB Rb里面截图上去的,之杨若古兰创作正文还不敷全面.如有出入的地方,敬请谅解!Derivative :微分模块,输出为输入旌旗灯号的微分.无需设置参数Integrator:积分模块,输出时输入旌旗灯号的积分,可设定初始条件(比方混沌零碎的仿真),通常情况下初始条件不必考虑Memory:输出来自前一个时间步的模块输入StateSpace:形态空间模块,次要利用利用于古代控制理论中多输入多输出零碎的仿真,双击模块可设置的次要参数有:系数矩阵A,B,C,D和初始条件Transfer Fcn:传递函数多项式模型,实现现行传递零碎,双击可设置分子多项式和坟墓多项式的系数Transport Delay:时间延迟模块,通过模块内部参数设定延迟时间Variable Transport Delay:将输入延迟一可变的时间ZeroPole:传递函数零、极点模型,实现一个用零极点标明的传递函数,双击设置零点、极点、增益Backlash:磁滞回环特性模块Coulomb & Viscous Friction:库伦摩擦与黏性摩擦特性模块Dead Zone:死区特性模块Hit Crossing:检测输入旌旗灯号的零交叉点模块Quantizer:阶梯状量化处理模块Rate Limiter:变更速率限幅模块Relay:带有滞环的继电特性模块Saturation:限幅的饱和特性模块Discrete Transfer Fcn:离散零碎传递函数多项式模型,可设置分子分母多项式Discrete ZeroPole:离散零碎传递函数零极点模型,可设置零点、极点、增益,可以设置采样时间Discrete Filter:离散零碎滤波器,可设置分子分母系数(按照z1作升幂排列),可设置采样时间Discrete StateSpace:离散零碎形态空间表达式模块,可设置参数矩阵A,B,C,D,可设置采样时间、初始条件DiscreteTime Integrator:离散零碎积分器模块,可设置采样时间、初始条件Unit Delay:离散零碎单位延迟模块,可设置采样时间,初始条件FistOrder Hol:一阶采样坚持器Memory:存储模块ZeroOrder Hold:零阶采样坚持器Discrete Filter:实现IIR和FIR滤波器Discrete StateSpace:实现一个离散形态空间零碎DiscreteTime Integrator:离散时间积分器Discrete Transfer Fcn :实现一个离散传递函数Discrete ZeroPol:实现一个用零极点来说明的离散传递函数FirstOrder Hold:实现一个一阶坚持采样坚持零碎Unit Delay:将旌旗灯号延时一个单位采样时间ZeroOrder Hold:实现具有一个采样周期的零阶坚持Direct LookUp Table(nD):直接查询n维表模块Interpolation(nD)Using Prelookup:适用预查询的n维内查表模块LookUp Table:一维查表模块LookUp Table(2D):二维查表模块LookUp Table(nD):n维查表模块PrelookUp Index Search:预查询索引搜寻模块Abs:绝对值或复数求模模块,输出是输入旌旗灯号的绝对值(或复数的模)Algebraic Constraint:代数束缚模块,将输入旌旗灯号束缚为零,计算输入旌旗灯号为零时的形态值Assignment:分配器模块Bitwise Logical Operator:位逻辑运算模块,可选择逻辑运算关系(与AND,或OR,非NOT,异或XOR等),可设置第二运算数(默认值为FFFF)Combinatorial Logic:实现一个真值表,组合逻辑运算模块Complex to MagnitudeAngle:复数模、角运算模块,输入量为复数,输出量有两个,一个输出为输入旌旗灯号的模,另一个为输入旌旗灯号的角Complex to RealImag:复数实部、虚部运算模块,输入量为复数,输出量有两个,一个输出为输入旌旗灯号的实部,另一个为输入旌旗灯号的虚部Derivative:输出输入旌旗灯号的时间微分Dot Product:两输入旌旗灯号进行点积(内积)运算,无需设置参数Gain:增益模块,将模块的输入旌旗灯号乘上一个增益Logical Operator:多输入单输出逻辑运算模块,可选择逻辑运算关系(与AND,或OR,非NOT,异或XOR等)、设置输入旌旗灯号的个数MagnitudeAngle to Complex:模角生成复数模块,默认输入量有两个:一模一角.可设置输入量为模和角中的一个,另一个量设为某一固定值Math Function:数学运算函数模块,默认值为输出量是输入量的e指数,可设置对数、平方根、平方等多种运算关系Matrix Concatenaion:矩阵级联模块Matrix Gain:矩阵增益模块,将输入乘上一个矩阵MinMax:计算最大与最小模块,输出量是输入向量的元素中的最小或最大值.可选择max或min,可设置输入变量的个数Polynomial:多项式运算模块Product:乘积运算模块,输出模块的乘积或者是商,可设置输入量为元素或矩阵,可设置输入端口个数RealImag to Complex:实部、虚部生成复数模块,默认输入量有两个:实部和虚部.可设置输入量为实部和虚部中的一个,另一个量设为某一固定值Reshape:矩阵从头定维模块Rounding Function:取整模块,实现一个舍入函数,可选的函数有:floor、ceil、round、fixSign:显示输入旌旗灯号的符号,当输入大于0时输出为1,当输入小于0时输出为1 Slider Gain:增益微调模块,按一条斜线来改变标量增益Sum:发生输入旌旗灯号的和Trigonometric Function:实现一个三角函数,sin、cos、tan、asin、acos、atan等Assertion:参数确定模块Check Static Gap:检测静态区间范围模块Check Static Lower Bound:检测静态上限模块Check Static Upper Bound:检测静态上限模块Check Static Range:检测静态范围变更模块Check Dynamic Gap:检测动态区间范围模块Check Dynamic Lower Bound:检测动态上限模块Check Dynamic Upper Bound:检测动态上限模块Check Dynamic Range:检测动态变更范围模块Check Dynamic Gradient:检测离散的斜率模块Check Dynamic Resolution:检测输入分辨率模块DOCBlock:说明性文本文件模块,双击可写入文本文件,可以写入零碎的使用说明等,存储格式为.txt Model Info:模型文件信息说明模块,可写入文件创立人、文件版本、文件点窜日期等信息TimeBased Linearization:时基线性化模型模块,双击可点窜线性化时间和线性化模型的采样时间TriggerBased Linearization:触发基线性化模型模块Automatic Subsystem:空白子零碎模块Configurable Subsystem:代表任何一个从指定的库当选择的模块Enable:添加一个使能端到子零碎中Enabled Subsystem:使能子零碎模块Enabled and Triggered Subsystem:使能与触发子零碎模块For Iterator Subsystem:For轮回控制子零碎模块FunctionCall Generator:调用函数发生器FunctionCall Subsystem:函数调用子零碎模块If:条件假设模块If Action Subsystem:If语句感化子零碎模块In 1:输入端口模块Out1:输出端口模块Subsystem:子零碎模块Subsystem Examples:子零碎举例模块Switch Case:条件分类模块Switch Case Action Subsystem:条件分类感化子零碎模块Trigger:添加一个出发端口到子零碎Triggered Subsystem:触发子零碎模块While Iterator Subsystem:While轮回控制子零碎模块Data Type Conversion:数据转换模块,将输入旌旗灯号转换为特定的输出旌旗灯号数据类型(如8位整数、16位整数、布尔类型等).IC:设置一个旌旗灯号的初始值,默认值为1Probe:旌旗灯号参数探测模块,输入一个旌旗灯号,输出4(可选1、2、3、4)个旌旗灯号,包含旌旗灯号宽度、采样时间、判断是否为复数旌旗灯号、旌旗灯号维数Rate Transition:旌旗灯号频率转换模块Signal Specification:旌旗灯号特性检测模块Width:旌旗灯号带宽检测模块,输出为输入向量的宽度Bus Creator:旌旗灯号汇总模块,将分歧类型旌旗灯号集结在一路Bus Selector:旌旗灯号选择模块,有选择的输出输入旌旗灯号Data Store Memory:定义一个共享的数据存储空间Data Store Read:从共享数据存储空间读数据Data Store Write:写数据到共享数据存储空间Demux:分路器,将一个向量旌旗灯号分解为多路旌旗灯号From:读矩阵模块,从一个Goto模块接收输入旌旗灯号Goto:写矩阵模块,传递模块输入到From模块Goto Tag Visibility:定义一个Goto模块标识表记标帜的可视视域Manual Switch:手动开关Merge:将几个输入线合并为一个标量线Multiport Switch:在多输入当选择一路作为输出的开关Mux:混路器,将几个输入旌旗灯号联合为一个向量旌旗灯号Model Info:显示、修订控制模型信息Hit Crossing:检测过零点Inport:为一个子零碎建立一个输入端口或者建立一个内部输入端口Outport :为子零碎建立一个输出端口,或者是建立一个内部输出端口Display:实时数字显示模块,显示其输入旌旗灯号的值Floating Scope:浮动示波器模块Out1:输出端口模块Scope:示波器模块,显示在仿真过程发生的旌旗灯号的波形Stop Simulation:仿真终止模块,当它的输入旌旗灯号非零时,就结束仿真Terminator:旌旗灯号终结模块,结束一个未连接的输出端口To File:写数据到文件To Workspace:把数据写进工作空间里定义的矩阵变量XY Graph:用一个MATLAB图形窗口来显示旌旗灯号的XY坐标的图形BandLimited White Noise:宽带限幅白噪声模块,把一个白噪声引入到连续零碎中Chirp Signal:线性调频旌旗灯号(频率按时间线性变更的正弦波)模块,发生频率添加的正弦旌旗灯号Clock:时钟旌旗灯号模块,显示或者提供仿真时间Constant :常量输入模块,发生一个常数值Digital Clock:数字时钟模块,按指定的间隔发生采样时间Digital Pulse Generator:发生具有固定间隔的脉冲From File:从一个文件读取数据From Work space:从在工作空间定义的矩阵读入数据Ground:接地模块,将一个未连接的输入端接地In1:输入端口模块Pulse Generator:脉冲旌旗灯号发生器模块,发生固定间隔的脉冲Ramp:斜坡旌旗灯号输入模块,发生一个以常数斜率添加或者减小的旌旗灯号Random Number:发生正态分布的随机数Repeating Sequence:发生一个可反复的任意旌旗灯号Signal Generator:发生多种多样的普通旌旗灯号Signal Builder:自定义旌旗灯号发生器Sine Wave:发生正弦波旌旗灯号Step:阶跃旌旗灯号模块,发生一个单步函数Uniform Random Number:发生均匀分布的随机数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电力线路模块PI Section Line单项π型线路单相传输线模块。
电阻,电感和电容的传输线,沿着线是均匀分布的。
级联几个相同的PI部分是通过以下方式获得一个近似的分布参数线路模型的Three-Phase PI Section Line三相电力线路模块实现了一个平衡的三相传输线模型参数集中在π部分。
相反,沿着线的电阻,电感和电容是均匀分布的分布参数线路模型,三相PI剖面线块肿块行参数在一个单一的π部分所示,在图中只有一相下代表。
被指定为正序和零序的,要考虑到的参数之间的感性和容性耦合的三相导体,以及地面参数的参数R,L,和C线。
在此方法的指定行参数假设,这三个阶段是平衡的。
使用一个单一的PI部分的模型是适当的传输线或短,在感兴趣的频率范围是有限的基频周围建模。
你可以得到更准确的模型通过级联多个相同的块。
见PI剖面线的最大频率范围的说明,通过PI线模型,可以实现。
频率用于R L C规范指定行参数所用的频率,以赫兹(Hz)。
这通常是标称系统频率(50赫兹或60赫兹)。
正序和零序电阻正序和零序电阻欧姆/公里(Ω/公里)。
正序和零序电感正序和零序电感:亨利/公里(H/公里)。
正序和零序电容正序和零序电容法拉/公里(F /公里)。
线路段长度(KM)该生产线部分长度在千米(公里)。
Three-Phase Transformer (Two Windings)三相变压器(两个绕组)使用三个单相变压器,三相变压器三相变压器两个绕组块实现了。
您可以模拟饱和的核心不是简单地通过在参数菜单中设置相应的复选框块。
线性变压器块和可饱和变压器块部分的单相变压器的电气模型的详细说明,请参阅。
可以以下列方式连接的两个绕组的变压器:1)Y2)Y与中性点3)接地Y4)三角洲三角洲(D1),30度的滞后Y通过5)D11)三角洲,三角洲领先的Y通过30度Three-Phase V-I Measurement三相电压-电流测量电压测量选择没有,如果你不想要测量三相电压。
选择相对地,如果你要测量的相对地电压。
选择相- 相,如果你要测量的相相电压。
使用标签如果选中,则发送的标记信号的电压测量。
使用从块读取的电压。
从块必须跳转到标签对应的信号标签参数指定的标签。
如果没有选择,电压测量可通过Vabc的功能块输出的。
信号标签指定的标签标记的电压测量。
在PU的电压如果选中,三相电压测量PU。
否则,他们衡量单位为伏特。
基极电压(VRMS相相)的基极电压,伏特均方根用来转换测量电压在PU。
基极电压(VRMS相相)参数是不可见的对话框中的,如果没有被选中的电压PU。
电流测量如果你想测量三相电流流过块,选择“是”。
使用标签如果选中,则发送的标记信号的电流测量的。
使用从块读取的电流。
从块必须跳转到标签对应的信号标签参数指定的标签。
如果没有选择,IABC可通过功能块输出的电流测量结果是。
信号标签指定的标签标记的电流测量。
电流的PU如果选中,三相电流测量PU。
否则,他们正在测量安培。
基本功率(V A3期)基数的三相电源,伏安(V A),用于将测得的电流PU。
基本功率(V A3相)参数在对话框中是不可见的,如果电流在PU未被选中。
如果电流如果电流单位。
Three-Phase Mutual Inductance Z1-Z0三相互感Z1-Z0三相互感Z1-Z0块实现了三相平衡的相之间的相互耦合电感和电阻的阻抗。
此块有三绕组互感块相同的功能。
对于三相平衡的电力系统,它提供了更方便的方式中的系统参数输入的正序和零序电阻和电感中的系数参数比,互阻和互感。
正序参数正序电阻R1,在欧姆(Ω),正序电感L1,亨(H)。
零序参数零序电阻R0,在欧姆(Ω),零序电感L0,亨(H)。
Three-Phase Programmable Voltage Source三相可编程电压源(三相无穷大电源)此块生成三相正弦电压随时间变化的参数。
您可以设定的时间变动的振幅,相位或频率的基波分量的源程序。
此外,两个谐波可以被编程,并叠加在基波信号。
正序伏RMS的相位,相位,以度为单位的相位,频率以赫兹为单位的三相电压的正序分量的振幅。
随时间的变化指定你要编程的时间变化的参数。
选择“无”,如果你不想编程源参数随时间的变化。
选择幅度,如果你想编程的振幅随时间的变化。
选择阶段,如果你要编程的相位随时间的变化。
选择频率,如果你想编程的频率随时间的变化。
需要注意的是随时间的变化适用于源,除了三个阶段的变化参数的类型被设置为振幅双表时,在这种情况下,你可以申请仅限A相上的变化。
变异类型指定的时间变化参数指定的参数被施加不同的变化。
选择步骤编程步骤变化。
选择斜坡编程斜坡变化。
选择调制方案调制的变化。
选择振幅双表编写了一系列的一步变化幅度在特定时间。
步进幅度这个参数是唯一可见的,如果变异类型参数设置步骤。
指定的阶跃变化的振幅。
指定的振幅的变化在正序振幅的pu中。
变化率这个参数是唯一可见的,如果变异类型参数设置坡道。
指定的变化率,在伏/秒。
中指定的电压变化率(pu中的正序电压)/秒。
振幅调制这个参数是唯一可见的,如果变化参数的类型被设置为调制。
指定为源的调制参数中指定的时间变化参数的幅度。
当不同数量的电压振幅的调制,振幅在积极序列振幅的pu中指定。
的调制频率这个参数是唯一可见的,如果变化参数的类型被设置为调制。
源参数中指定的时间变化参数指定的频率的调制。
变化的时间(S)指定的时间,在几秒钟内,在设定的时间变化生效的时间,当它停止。
基本和/或谐波产生如果选中,可以进行编程,两个谐波叠加在基波电压源。
正序伏RMS的相位,相位,以度为单位的相位,频率以赫兹为单位的三相电压的正序分量的振幅。
随时间的变化指定你要编程的时间变化的参数。
选择“无”,如果你不想编程源参数随时间的变化。
选择幅度,如果你想编程的振幅随时间的变化。
选择阶段,如果你要编程的相位随时间的变化。
选择频率,如果你想编程的频率随时间的变化。
需要注意的是随时间的变化适用于源,除了三个阶段的变化参数的类型被设置为振幅双表时,在这种情况下,你可以申请仅限A相上的变化。
变异类型指定的时间变化参数指定的参数被施加不同的变化。
选择步骤编程步骤变化。
选择斜坡编程斜坡变化。
选择调制方案调制的变化。
选择振幅双表编写了一系列的一步变化幅度在特定时间。
步进幅度这个参数是唯一可见的,如果变异类型参数设置步骤。
指定的阶跃变化的振幅。
指定的振幅的变化在正序振幅的pu中。
变化率这个参数是唯一可见的,如果变异类型参数设置坡道。
指定的变化率,在伏/秒。
中指定的电压变化率(pu中的正序电压)/秒。
Goto转到转到块将其输入到其相应的从块。
输入可以是任何数据类型的实际的或复值信号或矢量。
转到块允许您传递一个信号,从一个街区到另一个没有实际连接。
一个Goto块可以通过其输入信号从块不止一个,虽然从块可以接收到信号只能从一个转到块。
该返回块的输入被传递到来自虽然块进行物理连接,与它相关联的块。
转到块和块的匹配转到标签,通过使用标签参数中定义。
●Local:在默认情况下,也就是说,从“和”返回块采用相同的标记,必须在相同的子系统。
局部变量名括在方括号([])。
●Scoped:范围的手段,从使用相同的标记和Goto块必须在同一子系统或低于转到标签能见度块层次模型中的任何级别并不意味着穿越非虚子系统的边界,即一个原子,有条件的边界执行或函数调用子系统或模型参考。
一个范围的标记名称被括在大括号({})。
●Global:从使用相同的标记和Goto块模型中,除了可以随时随地跨越非虚子系统边界的位置。
Constant常数恒块生成一个真正的或复杂的恒定值。
该块生成标量(一个元素的数组),载体(1-D阵列),或矩阵(2维阵列)的输出,根据常值的解读向量参数的参数和设置的维数为1-D的参数。
此外,该块可以生成一个抽样为基础的或基于帧的信号,这取决于采样模式参数设置。
块的输出为常值参数具有相同的尺寸和元素。
如果此参数指定一个向量,你想块把它解释为一个向量(即一维数组),选择解释向量参数为1-D参数,否则,块把定值参数作为基质(即,一个2-D阵列)。
Manual Switch手动开关Static Synchronous Compensator (Phasor Type)静止同步补偿(相量型)Subsystem, Atomic Subsystem, Code Reuse Subsystem子系统,原子子系统,代码重用子系统一个子系统块代表的系统,它其中包含它的一个子系统,该子系统块可以代表作为一个虚的的体子系统或一个真正的的(原子的)体子系统,视的它的的当作原子单位(Atomic Unit)参数的值上而定。
原子子系统块是的子系统块具有其视为默认选中的原子单元参数。
您创建了一个子系统,在这些的方式中:港口及子系统到模型库复制子系统(或原子能子系统)块。
然后,您可以添加块到子系统的,通过打开在Subsystem块和复制块的纳入其的窗口。
选择块和行,以弥补子系统使用边界框,然后从“编辑”菜单中选择“创建子系统。
的Simulink ®软件与一个子系统块替换块。
当您打开这个块时,“窗口将显示所选的块,你,中添加inport的和外港块的,以反映信号,进入和离开的子系统的。
绘制子系统块的图标的输入端口的数量对应于子系统中的import的块的数量。
同样地,在上,画的块中的的的输出端口数对应于输出端口。
块中的体子系统的数目。
3-Phase Active & Reactive Power (Phasor Type)3相有功和无功功率(相量型)Mean value平均值Wind Turbine风力发电机Wind Turbine Doubly-Fed Induction Generator (Phasor Type)风力发电机组双馈感应发电机(相量型)The Wind Turbine and the Doubly-Fed Induction Generator System 风力发电机和双馈感应发电机系统Wind Turbine Induction Generator (Phasor Type)风力发电机组异步发电机(相量型)Generator Data Parameters标称功率,线到线电压和频率额定功率(V A),标称线到线电压Vrms和标称系统频率(Hz)赫兹。
定子[RS,LLS](PU)发电机额定值基于定子电阻Rs和泄漏电感LLS在PU。
转子[RR',LLR'](PU)转子电阻Rr和漏感LLR'的,称为定子,在PU根据发生器的评分。
磁化电感Lm(PU)在PU的磁化电感Lm上的发电机额定值。
转动惯量,摩擦系数和极对的组合的发电机和涡轮机的转动惯量H在秒,合并的粘性摩擦系数F中的普基于在发电机上的评分和数量的极对数p。