第3章信号调制与解调
测控电路课后习题答案(全)

一部现代的汽车往往装有几十个不同传感器�对点火时间、燃油喷射、空
积分等、非线性环节的线性化处理、逻辑判断等。
1-6 测量电路的输入信号类型对其电路组成有何影响�试述模拟式测量电路与 增量码数字式测量电路的基本组成及各组成部分的作用。 随着传感器类型的不同�输入信号的类型也随之而异。主要可分为模拟式
信号与数字式信号。随着输入信号的不同�测量电路的组成也不同。 图 X1-1 是模拟式测量电路的基本组成。传感器包括它的基本转换电路�如
应用于要求共模抑制比大于 100dB 的场合�例如人体心电测量。
2-8 图 2-8b 所示电路�N1、N2 为理想运算放大器�R4=R2=R1=R3=R�试求其闭环电压放大倍 数。 由图 2-8b 和题设可得 u01 =ui1 (1+R2 /R1) = 2ui1 , u0=ui2 (1+R4 /R3 )–2ui1 R4/R3 =2ui2–2
电桥�传感器的输出已是电量�电压或电流�。根据被测量的不同�可进行相应
的量程切换。传感器的输出一般较小�常需要放大。图中所示各个组成部分不 一定都需要。例如�对于输出非调制信号的传感器�就无需用振荡器向它供电� 也不用解调器。在采用信号调制的场合�信号调制与解调用同一振荡器输出的 信号作载波信号或参考信号。利用信号分离电路�常为滤波器��将信号与噪声 分离�将不同成分的信号分离�取出所需信号。有的被测参数比较复杂�或者 为了控制目的�还需要进行运算。对于典型的模拟式电路�无需模数转换电路 和计算机�而直接通过显示执行机构输出�因此图中将模数转换电路和计算机 画在虚线框内。越来越多的模拟信号测量电路输出数字信号�这时需要模数转 换电路。在需要较复杂的数字和逻辑运算、或较大量的信息存储情况下�采用 计算机。
移动通信_第三章_移动通信中的信源编码和调制解调技术

第三章
移动通信中的信源编码和调制 解调技术
胡苏 通信抗干扰技术国家级重点实验室
主要内容
3.1概述
3.2信源编码
3.3最小频移键控
3.4高斯最小频移键控 3.5QPSK调制/3.6高阶调制
3.7正交频分复用
2
胡苏@通信抗干扰
3.1 概述
信 源
信 源 编 码 信 道 编 码 调 制 解 信道 调 信 道 解 码 信 源 解 码 信 宿
4
二者比例 趋于平衡
胡苏@通信抗干扰
3.1 概述
语音编码概念:把模拟语音信号变成数
字语音信号,以便在信道中传输 意义
提高通话质量(数字化+纠错码) 提高频谱利用率(低码率编码) 提高系统容量(低码率+话音激活技术)
移动通信对语音编码要求?
低功耗、低复杂度、低延时 低码率、高质量
29
k ( k ) ak k
2
k
k 0 +(a0 a1 )
2
(a1 a2 )
2 k (ak 1 ak ) 2 2
举例输入:-1,1,1,1,初相为0,h=0.5,求满足相位连 续条件的相位转移图 1 ,k 0, 0 0 (T ) a =-
ak h
Tb
kTb k
ak 1h
Tb
kTb k 1
k k 1 ak 1 ak kh
令h=0.5时,满足相位连续的条件如下
k ak 1 ak k / 2 k 1
k 1 , ak 1 ak k k k 1 , ak 1 ak
可选模式语音声码器:基于输入语音的特征(浊音、
调制技术

3.3.1 高斯滤波器的传输特性
GMSK就是基带信号经过高斯低通滤波器的MSK,如图3.8。
b(t)
高斯低 通滤波器
q(t) MSK
GMSK信号的产生
s2 FSK (t )
cos c t k (t ) Tb
式中
k (t ) ak
h
Tb
k
kTb t (k 1)Tb
称作附加相位。
相位连续的2FSK
所谓相位连续是指不仅在一个码元持续期间相位连续, 而且在从码元ak-1到ak转换的时刻kTb,两个码元的相位 也相等,即
k (Tb ) k 1 (Tb )
即
ak
h
Tb
kTb k ak 1
h
Tb
(k 1)Tb k 1
这样就要求满足关系式:
k ak 1 ak h k k 1
即要求当前码元的初相位由前一码元的初相位、当前码元 ak和前一码元ak-1来决定。 这关系就是相位约束条件。这 两种相位特性不同的FSK信号波形如图3.3所示。
k () t
3 2
-1
+1
+1
+1
-1
+1
-1
0 2 3 1 2 3 4 5 6 t/Tb
...
图 3.6 附加相位的相位路径
2. MSK的频率关系
在MSK信号中,码元速率Rb=1/ Tb、峰值频偏fd和两个频率 f1、f2存在一定的关系。
cTb 2 fcTb 2 ( f 2 f1 )Tb m d Tb 2 f d Tb 2 ( f 2 f1 )Tb n
第3章数字调制解调技术
第3章 移动通信中的调制解调技术
3.2 数字频率调制
3.2.1 二进制数字频移键控(2FSK) 设输入到调制器的信号比特流为{an},an=“1”或
“0” n=-∞~+∞。当输入为传号“1”时,输出频率为f1 的正弦波;当输入为空号“0”时,输出频率为f2的正弦波。 FSK信号分为相位连续的FSK信号和相位跳变的FSK信号。 FSK信号的波形及功率谱如图3-3所示。
电子信息工程系通信技术教研室
第3章 移动通信中的调制解调技术
移动通信中的数字调制技术应具有以下特点: (1)要有窄的功率谱和高的频谱利用率。移动通信是 一种多波道系统,调制信号功率谱带外辐射对邻道产生干 扰,使性能下降。为了保证数字信息传输质量,信号功率 与干扰功率之比应大于20dB,考虑到移动台运动时的衰落 深度可达20~40dB,所以要求已调信号在邻道的总辐射干 扰低于20~40dB。 (2)误码性能好。移动通信环境以衰落、噪声、干扰 为特点,包括多径瑞利衰落、频率选择性衰落、多普勒频 移和障碍物阻挡的联合影响。因此,必须根据抗衰落和干 扰能力来优选调制方案。误码性能的好坏实际上反映了信 号的功率利用率的高低。
MSK调制器的原理框图如图3-6所示。
电子信息工程系通信技术教研室
第3章 移动通信中的调制解调技术
图3-6 MSK调制器的原理框图
电子信息工程系通信技术教研室
第3章 移动通信中的调制解调技术 4.频谱特点 MSK信号的功率谱如图3-7所示,图中还给出了QPSK
信号的功率谱。从图中可以看出,与QPSK相比,MSK信号 的功率谱具有较宽的主瓣,其第一个零点出现在(f-fc)=0.75 处,而QPSK信号的第一个零点出现在(f-fc)=0.5处。当(ffc)→∞时,MSK的功率谱以[(f-fc)Tb]-4 QPSK的衰减速率[(f-fc)Tb]-2快得多。MSK信号可以采用 鉴频器解调,也可以采用相干解调。
第三章 信号调制解调电路4
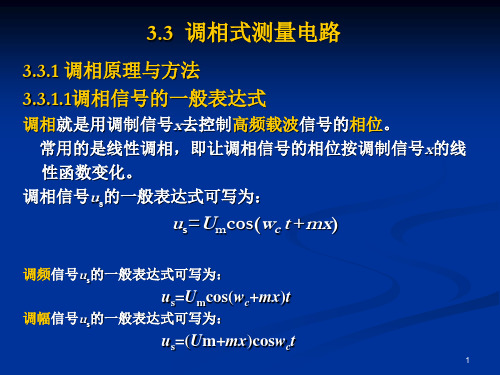
3.3.1 调相原理与方法 3.3.1.1调相信号的一般表达式
调相就是用调制信号x去控制高频载波信号的相位。 常用的是线性调相,即让调相信号的相位按调制信号x的线 性函数变化。 调相信号us的一般表达式可写为:
us=Umcos(wc t +mx)
调频信号us的一般表达式可写为:
x O U O
x B T
t a) 调制信号 t b) 脉冲调宽信号
19
3.4.1.1 传感器调制
4 5 6 7 8 9 10 11
3
M θ
2
1
用激光扫描的方法测量工件直径
20
3.4.1.2 电路调制
1、参量调宽
两个半周期通过不同的电阻通道向电容充电,输出信号的占 空比随两充电回路的阻值而变化
R 10k R1 10k C RP 5k ∞ R2 uo VS u +Ur +FUr
B
t N,uo t uo t -2 - 0 d) 2
13
2、RS触发器鉴相
Uc S R a) N,uo t t 0 B t uo t c)
14
Q Q
Uc O Us O Uc O Us O Q O b)
t
Us
1 2 π
2π
φ
3.3.2.4脉冲采样式鉴相
Uc 单稳 锯 齿 uj Uc′ 波 发 生 器 采样 保持 Us′ u′ 滤波器 uo
Uc
载波 频率
锯齿波 发生器
uj
+ ux
门限检 测电路
脉冲发 生器
输出调 相脉冲
us
a)
U0
Uc O uj O ux+uj U0 O us O uj=kΨ t c) t b)
第3章(3.2.4)M元PSK信号的最佳解调性能分析
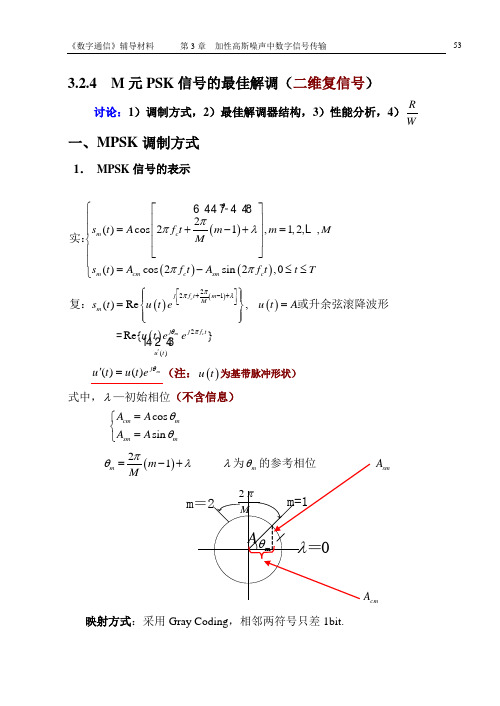
3.2.4 M 元PSK 信号的最佳解调(二维复信号)讨论:1)调制方式,2)最佳解调器结构,3)性能分析,4)R W一、MPSK 调制方式1. MPSK 信号的表示()()()2()cos 21,1,2,,()cos 2sin 2,0mm c m cm c sm c s t A f t m m M M s t A f t A f t t Tθππλππ⎧⎡⎤⎪⎢⎥=+-+=⎪⎢⎥⎨⎢⎥⎪⎣⎦⎪=-≤≤⎩ 实: ()()()()2212()()Re , Re{}c m c j f t m M m j j f tu t s t u t e u t A u t e e ππλθπ⎡⎤+-+⎢⎥⎣⎦'⎧⎫⎪⎪==⎨⎬⎪⎪⎩⎭复:或升余弦滚降波形=m j e t u t u θ)()(='(注:()u t 为基带脉冲形状) 式中,λ—初始相位(不含信息)cos sin cm msmm A A A A θθ=⎧⎨=⎩ ()21m m Mπθλ=-+sm A映射方式:采用Gray Coding ,相邻两符号只差1bit.{a n }nj n Ae I θ=例:4PSK, M=4, k=2log M =2, 每个符号由2bit 组成=λ4λ=2 MPSK 信号的产生方法(调制器原理性结构) 根据()m S t 的两种实信号表示方法引出 1)相位选择法{a n }2)正交分量合成法{a n c 0010二、 MPSK 最佳解调器的结构1 由判决变量导出解调器结构的一般形式已知发:()()2Re ,0c j f tn s t u t e t T π⎡'⎤=≤≤⎣⎦n )()(θj e t u t u =' (),u t A =或升余弦波形 收:()()()j r t e u t z t φα-'=+(注:()u t 为基带脉冲形状) 实判决变量:()(){}*0Re Tj m m U er t u t dtφ=⎰, (注:相干加匹配滤波,接收机已知m j m e t u t u θ)()(,=)()() *mV MF V Re m T j j e r t u t dt e θφ-*⎧⎫⎪⎪=∙⎨⎬⎪⎪⎩⎭⎰ 发送信号输出信号向量参考向量 mj m V e θ=MFm j m V e θ=属于接收机保存的变量(矢量)。
移动通信原理与系统 第二版 课后答案
分
Part B
割
Part C
3.3 在移动通信中对调制有哪些考虑?
答:①频带利用率 ②功率效率 ③已调信号恒包络 ④易于解调 ⑤带外辐射
3.4 什么是相位不连续的 FSK?相位连续的 FSK(CPFSK)应当满足什么条件?为什么移动 通信中,在使用移频键控一般总是考虑使用 CPFSK?
答:相位不连续的 2FSK 信号在码元交替时刻,波形是不连续的(开关方法所得)
ak 1到ak
所谓相位连续是指不仅在一个元码持续时间连续而且在从元码 等满足关系式 转换的时刻
kTb 两个元码相位也相
k (ak -1 ak ) * k k -1 即要求当前元码的初相位 k 由前一元码的初相位 k 1 来决定。
3.8GMSK 系统空中接口传输速率为 270.83333kbit/s,求发送信号的两个频率差。若载波频率 是 f 900 MHz ,这两个频率又等于多少?
1.4 移动通信的工作方式主要有几种?蜂窝式移动通信系统采用哪种方式?
答:①单工通信; ②双工通信(蜂窝式移动通信系统采用该方式) ; ③单双工通信; ④移动中继方式。
换算:
总式:1W=0dBW=10log1W=10log1000mW=30dBm Pr(dBm)=10lgPr(mW) Pr(dBW)-10lgPr(W) ①10mW=10lg10(mW)=10(dBm) ②20mW=10lg20(mW)=13.01(dBm) ③1W=0(dBW)=30(dBm)
2.5 设载波频率 f c 1900 MHz ,移动台运动速度 v 50m / s ,问移动 10m 进行电波传播测量时 需要多少个样值?在车行驶时进行实时测量需要多少时间?信道的多普勒扩展为多少?
通信系统原理教程(第二版)(王兴亮)第1-3章章 (3)
-ωc的频谱部分。
第 3 章模拟信号的调制与解调 ( 3 ) AM 波 占 用 的 带 宽 BAM ( Hz ) 应 是 基 带 消 息 信 号 带 宽 fm
② 在频域范围内, 载波频率应远大于x(t)的最高频谱分量,
fc fm
(3-4)
若不满足此条件, 则会出现频谱交叠, 此时的包络形状一 定会产生失真。
第 3 章模拟信号的调制与解调
振幅调制信号的一个重要参数是调幅度ma, 其定义如下:
ma
def
[ A(t)]max [ A(t)]max
[ A(t)]min [ A(t)]min
SDSB
()
1 2
X
(
c
)
1 2
X
(
c
)
(3-8) (3-9)
第 3 章模拟信号的调制与解调
图 3-3 DSB (a) 调制信号; (b) 载波信号; (c) 已调波信号
第 3 章模拟信号的调制与解调
由于DSB频谱中没有载波分量,Pc=0。因此,信号的全部功 率都包含在边带上,
PDSB
PS
x2 (t) 2
第 3 章模拟信号的调制与解调
相应的频域表示式为
Sc
()
1 2
[SI
(
c )
SI
(
c
)]
j 2
[SQ (
c )
SQ
HVSB ( c ) HVSB ( c ) 常数
第3章(3.2.6)APM(或APK)信号最佳解调性能分析
a ni ja nr A n
四.QAM 信号最佳解调性能分析
设:M 元 QAM 信号 复符号
M 2k ,且 k 为偶数。
I n 在(0,T)内含 k bit—— 2k M 元。
k k 两个正交分量 I nr , I ni 在(0,T)内各有 bit —— 2 2 M 元。 2
2A
,D=2A(最小欧式距离) 。
d=2A
(a)
A2
d = A12 A22 = 2 A A1
A1
A1 A A2 3 A
(b) 4APM
2) PM 相同, Pav 不同
例:五种不同的 8 点星座(图 5-2-15(a)-(d) 8APM, (e)8PSK )
《数字通信》辅导材料
第3章
加性高斯噪声中数字信号传输
)
此式对任意 k 都适用。
P M 4Q(
可见
)
M
QAM 优于 MPSK 和 MPAM。
五.QAM 系统的带宽效率
根据奈氏准则(2 Baud/Hz) 1 W 2T
则
kT R 2k 2 log 2 M W 1 2T R ) W
六.QAM 系统与 MPSK 系统的比较( PM ,
m=1, 2, ..., M
=Am cos 2 f ct -Bm sin 2 f ct, 0 t T 式中,
Am ,Bm } 为一组正交离散幅度对,确定信号点在二维信号平面上位置。
Am=d m A 令 Bm=em A
A--固定幅度值(度量单位,或称比例因子) , d m,em ――信号点的坐标。
85
图 5-2-15
(a)(c)
Pav =6 A2 Pav =6.83 A2 Pav =4.73 A2 Pav =6.81 A2 (e) 2.61 2
第三章 2 无线通信中的数字调制与解调(宽带无线常用数字调制方法)
z
数字调制技术可以大致分为线性和非线性的。
9 线性调制技术带宽效率高,所以非常适合用于有限频带 内要求容纳越来越多用户的无线通信系统。
2006-10-2
4/71
引言
z
无论我们研究出什么调制方式其目的都是一样的, 即为了满足移动通信的数字调制和解调器技术的要 求。对移动通信的数字调制和解调器技术有以下的 要求:
29/71
2006-10-2
四相相移键控 (QPSK)
z z
QPSK信号也可以采用正交调制的方式产生,正交调 制器可以看成由两个载波正交的BPSK调制器构成。 QPSK相位选择法调制原理如下图所示
串/并 变换 逻辑选相电路 带通 滤波器
输入
输出
45D
135D 225D 315D
四相载波发生器 相位选择法产生QPSK原理图
9 在信道衰落条件下,误码率要尽可能低; 9 发射频谱窄,对相邻信道干扰; 9 高效率的解调,以降低移动台功耗,进一步缩小体积和 成本; 9 能提供较高的传输速率; 9 易于集成。
2006-10-2
5/71
引言
z
在移动通信环境中,移动台的移动使电波传播条件 恶化,特别是快衰落的影响使接收场强急剧变化。
9 在选择调制方式时,必须考虑采取抗干扰能力强的调制 方式,能适用于快衰落信道,占有相对较小的带宽以提 高频谱利用率,并且带外辐射要小以减小对邻近波道的 干扰。
z
在线性调制技术中,传输信号的幅度s(t)随调制数字 信号m(t)的变化而线性变化,一般来说都不是恒包络。 在许多实际的移动无线通信系统中都使用非线性调 制方法,这时不管调制信号如何改变,载波幅度都 是恒定的,即恒包络调制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对于双边带调制:
us mX mX 2
m m
cos( c ) t
mX 2
xm
m
cos( c ) t
cos t cos c t U
cos t cos c t
双边带调制可用乘法器实现,称为相乘调制。
相乘调制常用电路实现。常用的串并联调制器
实质上就是一个相乘调制器。在输入端加入测量信
以上的信号抑制,可选通频带为200 Hz。
2. 传感器调制
(1) 为什么在测控系统中常常在传感器中进行信号调制? 为了提高测量信号抗干扰能力,常要求从信号一
形成就已经是已调制的信号,因此常常在传感器中进 行调制。
(2)通过交流供电实现调制 如电阻式传感器、电感式传感器和电容式传感器。
R1 R1 R2 R3 R4 R2 Uo R3 U
F R4
应变式传感器输出信号的调制
3. 电路调制
(1)乘法器调制
+12V
1kΩ 51Ω 0.1μF 1kΩ 0.1μF 1kΩ 3.3kΩ 3.3kΩ
ux uc
Kxy x y
uc
uo
ux 20μF 750Ω 47kΩ
a)原理图
82 3 6 uo 10 12 1MC1496 0.1μF 4 14 5 680kΩ 1kΩ1kΩ 20μF
xm
cos t
4 n 3U
xm
r
cos t cos c t
cos t cos 3 c t
式中n3为变压器的变比。
从上式看到,相加型调幅电路的输出中信号的分量与相乘 电路是相同的。这一点是容易理解的。在相乘电路中, T1 、T2 起开关作用,即起乘0、1方波信号的作用。相加电路中,D1、 D2同样起开关作用,起乘0、1 方波信号的作用。所不同的是加 到开关上的仅是调制信号ux,UC仅起控制开关通断的作用。因 为只有一个信号加到开关上与0、1方波信号相乘,故称相乘型 调幅电路。而相加型电路的ux与uc同时加到开关上,故称相加 型调幅电路。
T+ us _
VD i RL C2
ic
+ uo _ C1 + V T us Ec RL C2 _ 非线性 低通 器件 滤波器
(b) 晶体管检波电路
+ uo _
C1
非线性 低通 器件 滤波器
(a) 二极管检波电路
图3-5 包络检波电路
图3-5是两种包络检波电路,图(a)采用二极管作为整流用 非线性元件,图(b)采用晶体管。如果输入的调幅波具有图36(a)所示波形,那么经整流后其波形如图(b)所示。为了获得调 制信号,还要用滤波器滤除载波分量。
号Ux,T1 、T2是两个场效应管开关,在它们的栅极
与幅值按1、0变化的载波信号相乘。如下图所示:
分别加入高频方波信号。经过调制,输入信号Ux ,
U U
c
1 , T1导通, 0 , T1 截止,
T 2 截止, T 2 导通,
U U
0
U U
x
( 1) U ( 0 ) 0
x
第3章 信号调制解调电路
3.1 调幅式测量电路及其应用 3.2 调频式测量电路 3.3 调相式测量电路
3.4 脉冲调制式测量电路
在非电量测量仪器中,对被测非电量信号,
一般具有较低的频谱,常在零频(直流)到几十
kHz范围内变化。当被测信号比较弱时,在信号
传送过程中,易受其它同频信号干扰,如易受工
为平均值检波,其输出波形如图3-6(c)所示。当尺RLC 》
1/ωc时,可以认为由于电容C充放电造成的残余高频分量 很小,输出信号的波形是与调制信号相似的平滑曲线。
2) 峰值检波与平均值检波 平均值检波输出波形如图3-6(c)所示。原因是晶体管V 只在半个周期导通,半个周期ic对电容C充电,另半个周期 电容C向电阻RL放电,流过RL的平均电流只有ic / 2,这种检 波称为平均值检波。 在二极管检波电路中、由于整个电路是串联的,加在 二极管两端的电压u是输入高频电压ux与输出电压u0之差。 如图3-5中二极管VD与晶体管V都具有理想的线性特性,那 么在晶体管检波器中,余弦电流脉冲的通角为θ=π/2。而 在二极管检波器中电流脉冲的通角θ= cos-1 u0 /Um。负载RL 与二极管正向电阻r之比越大,需要向滤波器供电的时间越短, θ越小。这种检波器称为峰值检波器。低通滤波器的时间常 1 c R L C 1,以滤除载波信号,同时保留 数应满足 调制信号。“峰值”是指高频信号的峰值。
c
0
x
3. 在测控系统中被测信号的变化频率为0~100Hz, 应怎样选取载波信号的频率?应怎样选取调幅信 号放大器的通频带?信号解调后,怎样选取滤波 器的通频带?
为了正确进行信号调制必须要求ωc>>Ω,通常至 少要求ωc>10Ω。这样,解调时滤波器能较好地将调 制信号与载波信号分开,检出调制信号。若被测信 号 的 变 化 频 率 为 0~100Hz , 则 载 波 信 号 的 频 率 ωc>1000 Hz 。 调 幅 信 号 放 大 器 的 通 频 带 应 为 900~1100 Hz。信号解调后,滤波器的通频带应大于 100 Hz,即让0~100Hz的信号顺利通过,而将900 Hz
3.1.2 包络检波电路
什么是包络检波?
从已调信号中检出调制信号的过程称为
解调或检波。幅值调制就是让已调信号的幅
值随调制信号的幅值变化,因此调幅信号的
包络线形状与调制信号一致。只要能检出调
幅信号的包络线即能实现解调。这种方法称
为包络检波。
包络检波的基本工作原理是什么?
us uo '
O
a)
t
O
3.1 调幅式测量电路
3.1.1 调幅原理与方法
一、调幅信号的一般表达式
1. 什么是调幅?写出调幅信号的数学表达式,画出其波形。 调幅就是用调制信号x去控制高频载波信号的幅值。常用 的是线性调幅,即让调幅信号的幅值按调制信号x的线性 函数变化。
调幅信号的一般表达式可写为:
us=(Um+mx)cosωct
要求Ucm>>Uxm,这时二极管D1和D2受uc控制,工作在开关状态。 i l=(uc+ux)K(ωct )/r i2=(uc-ux) K(ωct ) /r 式中 r为二极管的内阻与负载RL折合到原边的等效电阻之和。 K(ωct )为归一化的方波信号展开系数。
调 制 信 号 T + VD1 i1 1 ux -R + u c P T + 2 ux 载波信号 VD2 i2 T
-8V
b) 实用电路
(2)开关电路调制(前已述及)
ux
V1
ux V2 uo
O Uc O uo O
t
t
t
Uc Uc
(3)信号相加调制
在线性电路中,两个不同频率的信号相加,不会得
到第三个频率的信号,从而也就不能进行调制。为了获 得频率变换,必须在电路中加入非线性器件。
下图是一个典型的相加型调幅电路。为了提高调制线性,电路
过仪器的定标,可以确定振动中心相对于给定零位的偏
移与振动幅值。
二、 精密检波电路
为什么要采用精密检波电路?
二极管VD和晶体管V都有一定死区电压,
即二极管的正向压降、晶体管的发射结电压 超过一定值时才导通,它们的特性也是一根 曲线。二极管VD和晶体管V的特性偏离理想特 性会给检波带来误差。为了提高检波精度, 常需采用精密检波电路,它又称为线性检波 电路或精密整流电路。
5. 什么是调制信号、载波信号、已调信号?
调制是给测量信号赋予一定特征,这个特
征由作为载体的信号提供。常以一个高频正 弦信号或脉冲信号作为载体,这个载体称为 载波信号。 用来改变载波信号的某一参数,如幅值、
频率、相位的信号称为调制信号。
在测控系统中,通常就用测量信号作调制
信号。经过调制的载波信号叫已调信号。
u s U m cos c t mX 2
m
cos( c ) t
mX 2
m
cos( c ) t
它包含三个不同频率的信号: 角频率为ωc的载波信号和 角频率分别为ωc±Ω的上下边频信号。载波信号中不含调制
信号x的信息,因此可以取Um=0,只保留两个边频信号。
这种调制称为双边带调制。 其数学表达式为:us=UxmcosΩt cosωct
频干扰及直流放大的低频噪声与直流漂移等影响,
不宜采用直接放大的形式,经常采用调制——解
调方法,提高电路的抗干扰能力、传输能力及有
效地提高信噪比。
调制——解调的作用在于某种调制方法, 将原始的低频信号频谱调制到另一个具有高频的 频谱上。经调制后的高频调制波,具有原始输入 信号的全部信息,再经过有效的交流放大后,使
b)
t
由图可见,只要从图a所示的调幅信号中,ห้องสมุดไป่ตู้截去它的下半部,即可获得图b所示半波检波后 的信号 (经全波检波或截去它的上半部也可), 再经低通滤波,滤除高频信号,即可获得所需 调制信号,实现解调。包络检波就是建立在整 流的原理基础上的。
一、二极管与三极管包络检波
1. 基本电路:二极管与三极管包络检波电路如图3-5所示。
制;相位调制以及脉冲调制,使其随原始输入信 息发生改变。
调制的频率变换是由低频变高频的过程。 解调的频率变换是由高频变低频的过程。
调制和解调都能引起信号频率的变化,电子
学常把调制与解调看成频率变换电路。
将测量信号从含有噪声的信号中分离出 来测量是电路的一项重要功用。
1. 什么是信号调制? 调制就是用一个信号(称为调制信号)去 控制另一个做为载体的信号(称为载波信 号),让后者的某一特征参数按前者变化。 2. 什么是解调? 在将测量信号调制,并将它和噪声分离, 放大等处理后,还要从已经调制的信号中提 取反映被测量值的测量信号,这一过程称为 解调。