自动控制原理作业答案1-7(考试重点)
自动控制原理课后习题答案
第1章控制系统概述【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成各个环节分别的作用是什么解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
自动控制原理作业答案1-7(考试重点)演示教学
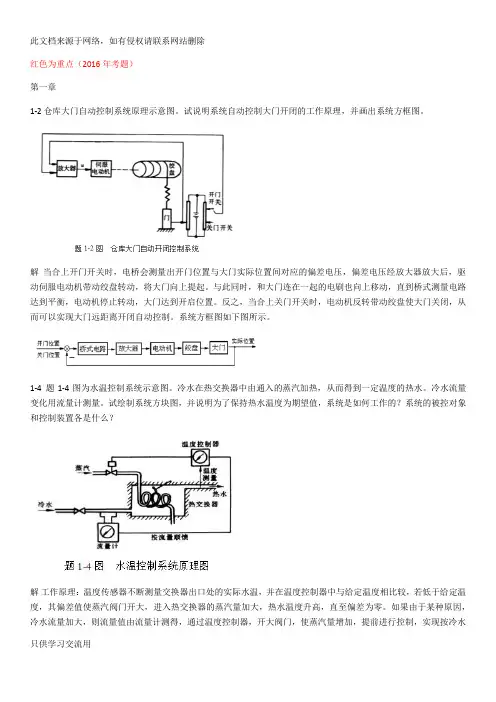
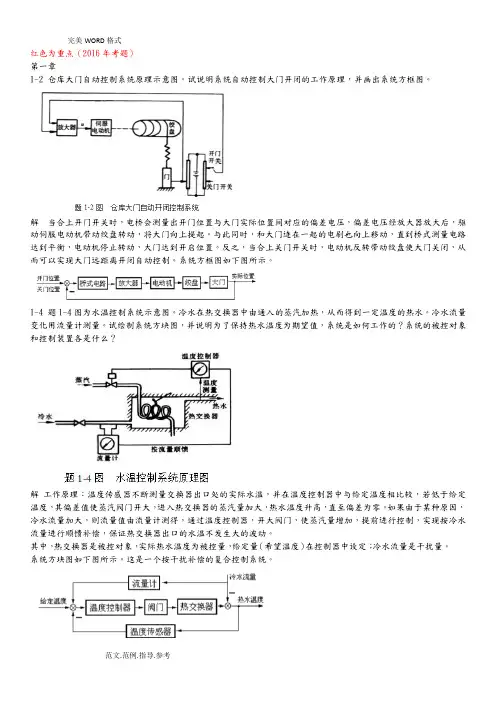
红色为重点(2016年考题)第一章1-2仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
解当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机反转带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如下图所示。
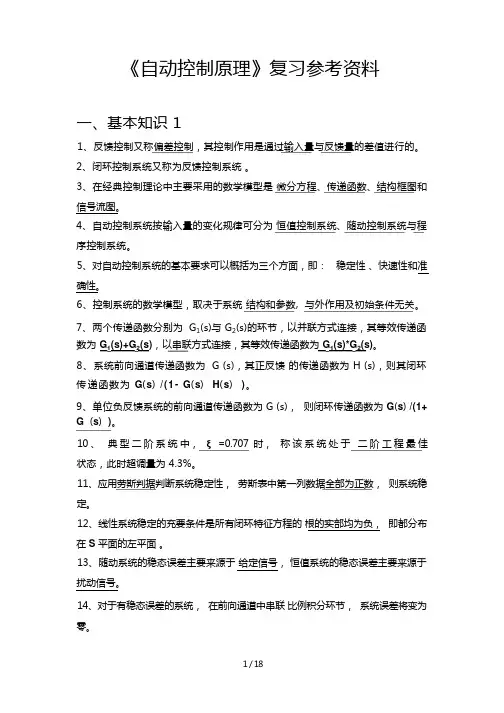
1-4 题1-4图为水温控制系统示意图。
冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。
冷水流量变化用流量计测量。
试绘制系统方块图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么?解工作原理:温度传感器不断测量交换器出口处的实际水温,并在温度控制器中与给定温度相比较,若低于给定温度,其偏差值使蒸汽阀门开大,进入热交换器的蒸汽量加大,热水温度升高,直至偏差为零。
如果由于某种原因,冷水流量加大,则流量值由流量计测得,通过温度控制器,开大阀门,使蒸汽量增加,提前进行控制,实现按冷水流量进行顺馈补偿,保证热交换器出口的水温不发生大的波动。
其中,热交换器是被控对象,实际热水温度为被控量,给定量(希望温度)在控制器中设定;冷水流量是干扰量。
系统方块图如下图所示。
这是一个按干扰补偿的复合控制系统。
1-5图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量及各部件的作用,画出系统方框图。
解加热炉采用电加热方式运行,加热器所产生的热量与调压器电压Uc的平方成正比,Uc增高,炉温就上升,Uc 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压Uf。
Uf作为系统的反馈电压与给定电压Ur进行比较,得出偏差电压Ue,经电压放大器、功率放大器放大成au后,作为控制电动机的电枢电压。
自动控制原理习题答案详解
自动控制原理习题答案详解自动控制原理习题详解(上册)第一章习题解答1-2日常生活中反馈无处不在。
人的眼、耳、鼻和各种感觉、触觉器官都是起反馈作用的器官。
试以驾车行驶和伸手取物过程为例,说明人的眼、脑在其中所起的反馈和控制作用。
答:在驾车行驶和伸手取物过程的过程中,人眼和人脑的作用分别如同控制系统中的测量反馈装置和控制器。
在车辆在行驶过程中,司机需要观察道路和行人情况的变化,经大脑处理后,不断对驾驶动作进行调整,才能安全地到达目的地。
同样,人在取物的过程中,需要根据观察到的人手和所取物体间相对位置的变化,调整手的动作姿势,最终拿到物体。
可以想象蒙上双眼取物的困难程度,即使物体的方位已知。
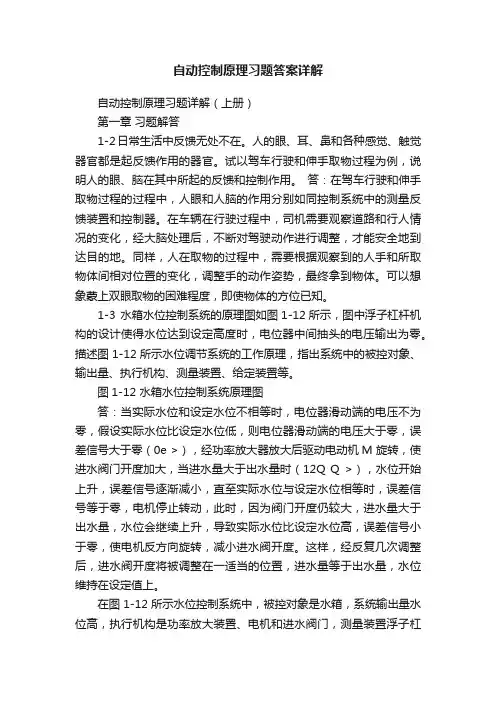
1-3 水箱水位控制系统的原理图如图1-12所示,图中浮子杠杆机构的设计使得水位达到设定高度时,电位器中间抽头的电压输出为零。
描述图1-12所示水位调节系统的工作原理,指出系统中的被控对象、输出量、执行机构、测量装置、给定装置等。
图1-12 水箱水位控制系统原理图答:当实际水位和设定水位不相等时,电位器滑动端的电压不为零,假设实际水位比设定水位低,则电位器滑动端的电压大于零,误差信号大于零(0e >),经功率放大器放大后驱动电动机M 旋转,使进水阀门开度加大,当进水量大于出水量时(12Q Q >),水位开始上升,误差信号逐渐减小,直至实际水位与设定水位相等时,误差信号等于零,电机停止转动,此时,因为阀门开度仍较大,进水量大于出水量,水位会继续上升,导致实际水位比设定水位高,误差信号小于零,使电机反方向旋转,减小进水阀开度。
这样,经反复几次调整后,进水阀开度将被调整在一适当的位置,进水量等于出水量,水位维持在设定值上。
在图1-12所示水位控制系统中,被控对象是水箱,系统输出量水位高,执行机构是功率放大装置、电机和进水阀门,测量装置浮子杠杆机构,给定和比较装置由电位器来完成。
1-4 工作台位置液压控制系统如图1-13所示,该系统可以使工作台按照给定电位器设定的规律运动。
自动控制原理课后习题答案
第1章控制系统概述【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用是什么?解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
自动控制原理作业答案解析1-7(考试重点)
红色为重点(2016年考题)第一章1-2 仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
解当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机反转带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如下图所示。
1-4 题1-4图为水温控制系统示意图。
冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。
冷水流量变化用流量计测量。
试绘制系统方块图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么?解工作原理:温度传感器不断测量交换器出口处的实际水温,并在温度控制器中与给定温度相比较,若低于给定温度,其偏差值使蒸汽阀门开大,进入热交换器的蒸汽量加大,热水温度升高,直至偏差为零。
如果由于某种原因,冷水流量加大,则流量值由流量计测得,通过温度控制器,开大阀门,使蒸汽量增加,提前进行控制,实现按冷水流量进行顺馈补偿,保证热交换器出口的水温不发生大的波动。
其中,热交换器是被控对象,实际热水温度为被控量,给定量(希望温度)在控制器中设定;冷水流量是干扰量。
系统方块图如下图所示。
这是一个按干扰补偿的复合控制系统。
1-5图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量及各部件的作用,画出系统方框图。
解加热炉采用电加热方式运行,加热器所产生的热量与调压器电压Uc的平方成正比,Uc增高,炉温就上升,Uc 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压Uf。
Uf作为系统的反馈电压与给定电压Ur进行比较,得出偏差电压Ue,经电压放大器、功率放大器放大成au后,作为控制电动机的电枢电压。
自动控制原理题目(含答案)
《自动控制原理》复习参考资料一、基本知识 11、反馈控制又称偏差控制,其控制作用是通过输入量与反馈量的差值进行的。
2、闭环控制系统又称为反馈控制系统。
3、在经典控制理论中主要采用的数学模型是微分方程、传递函数、结构框图和信号流图。
4、自动控制系统按输入量的变化规律可分为恒值控制系统、随动控制系统与程序控制系统。
5、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。
6、控制系统的数学模型,取决于系统结构和参数, 与外作用及初始条件无关。
7、两个传递函数分别为 G1(s)与 G2(s)的环节,以并联方式连接,其等效传递函数为G(s)+G2(s),以串联方式连接,其等效传递函数为G1(s)*G2(s)。
18、系统前向通道传递函数为 G (s),其正反馈的传递函数为 H (s),则其闭环传递函数为G(s) /(1-G(s) H(s) )。
9、单位负反馈系统的前向通道传递函数为 G (s),则闭环传递函数为G(s) /(1+ G(s) )。
10 、典型二阶系统中,ξ=0.707 时,称该系统处于二阶工程最佳状态,此时超调量为 4.3%。
11、应用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为正数,则系统稳定。
12、线性系统稳定的充要条件是所有闭环特征方程的根的实部均为负,即都分布在S平面的左平面。
13、随动系统的稳态误差主要来源于给定信号,恒值系统的稳态误差主要来源于扰动信号。
14、对于有稳态误差的系统,在前向通道中串联比例积分环节,系统误差将变为零。
15、系统稳态误差分为给定稳态误差和扰动稳态误差两种。
16 、对于一个有稳态误差的系统,增大系统增益则稳态误差将减小。
17 、对于典型二阶系统,惯性时间常数 T 愈大则系统的快速性愈差。
18 、应用频域分析法,穿越频率越大,则对应时域指标 ts越小,即快速性越好19 最小相位系统是指 S 右半平面不存在系统的开环极点及开环零点。
20、按照校正装置在系统中的不同位置,系统校正可分为串联校正、反馈校正、补偿校正与复合校正四种。
自动控制原理作业题(后附答案)
自动控制原理作业题(后附答案)-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII自动控制原理作业题第一章基本概念一、简答题1 简述自动控制的基本概念2 简述自动控制系统的基本组成3 简述控制系统的基本控制过程4 简述自动控制系统的基本分类5 试比较开环控制和闭环控制的特点6 简述自动控制系统的性能评价指标二、分析计算题1 液位自动控制系统如图所示。
试分析该系统工作原理,画出系统原理框图,指出被控对象、被控参量和控制量2 发动机电压调节系统如图所示,试分析其工作原理,画出系统原理框图,指出其特点。
3液面控制系统如图所示。
试分析该系统的工作原理,指出系统中的干扰量、被控制量及被控制对象,并画出系统的方框图。
4控制系统如图所示。
简述该系统的工作原理,说明该系统的给定值、被控制量和干扰量,并画出该系统的方块图。
图1-7发电机-电动机调速系统操纵电位计发电机伺服电机减速器负载Θr给定值Ur 前置放大器功放执行元件被控量Wm这是一个开环控制的例子+E-EUr操纵电位计R1R2R3R4放大器直流发电机伺服电机Wd Wm发电机-电动机调速系统减速器负载5火炮随动控制系统如图所示。
简述该系统的工作原理,并画出该系统的原理框图。
第二章 线性控制系统的数学模型一、简答题1 简述建立控制系统数学模型的方法及其数学表示形式2 简述建立微分方程的步骤3 简述传递函数的基本概念及其特点4 给出组成控制系统典型基本环节二、分析计算题1 有源电网络如图所示,输入量为)(1t u ,输出量为)(2t u ,试确定该电网络的传递函数2 电枢控制式直流电动机原理图如图所示,输入量为)(1t e ,输出量为)(t o θ,试确定其微分方程。
图中,电动机电枢输入电压;电动机输出转角;电枢绕组的电阻;电枢绕组的电感;流过电枢绕组的电流;电动机感应电势;电动机转矩;电动机及负载这和到电动机轴上的转动惯量;电动机及负载这和到电动机轴上的粘性摩擦系数。
自动控制原理作业答案1-7(考试重点)
红色为重点(20XX年考题)第一章1-2 仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
解当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机反转带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如下图所示。
1-4 题1-4图为水温控制系统示意图。
冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。
冷水流量变化用流量计测量。
试绘制系统方块图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么?解工作原理:温度传感器不断测量交换器出口处的实际水温,并在温度控制器中与给定温度相比较,若低于给定温度,其偏差值使蒸汽阀门开大,进入热交换器的蒸汽量加大,热水温度升高,直至偏差为零。
如果由于某种原因,冷水流量加大,则流量值由流量计测得,通过温度控制器,开大阀门,使蒸汽量增加,提前进行控制,实现按冷水流量进行顺馈补偿,保证热交换器出口的水温不发生大的波动。
其中,热交换器是被控对象,实际热水温度为被控量,给定量(希望温度)在控制器中设定;冷水流量是干扰量。
系统方块图如下图所示。
这是一个按干扰补偿的复合控制系统。
1-5图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量及各部件的作用,画出系统方框图。
解加热炉采用电加热方式运行,加热器所产生的热量与调压器电压Uc的平方成正比,Uc增高,炉温就上升,Uc 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压Uf。
Uf作为系统的反馈电压与给定电压Ur进行比较,得出偏差电压Ue,经电压放大器、功率放大器放大成au后,作为控制电动机的电枢电压。
自动控制原理题目(含答案)
《自动控制原理》复习参考资料一、基本知识11、反馈控制又称偏差控制,其控制作用是通过输入量和反馈量的差值进行的。
2、闭环控制系统又称为反馈控制系统。
3、在经典控制理论中主要采用的数学模型是微分方程、传递函数、结构框图和信号流图。
4、自动控制系统按输入量的变化规律可分为恒值控制系统、随动控制系统和程序控制系统。
5、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。
6、控制系统的数学模型,取决于系统结构和参数, 和外作用及初始条件无关。
7、两个传递函数分别为G1(s)和G2(s)的环节,以并联方式连接,其等效传递函数为G1(s)+G2(s),以串联方式连接,其等效传递函数为G1(s)*G2(s)。
8、系统前向通道传递函数为G(s),其正反馈的传递函数为H(s),则其闭环传递函数为G(s)/(1- G(s)H(s))。
9、单位负反馈系统的前向通道传递函数为G(s),则闭环传递函数为G(s)/(1+ G(s))。
10、典型二阶系统中,ξ=0.707时,称该系统处于二阶工程最佳状态,此时超调量为4.3%。
11、使用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为正数,则系统稳定。
12、线性系统稳定的充要条件是所有闭环特征方程的根的实部均为负,即都分布在S平面的左平面。
13、随动系统的稳态误差主要来源于给定信号,恒值系统的稳态误差主要来源于扰动信号。
14、对于有稳态误差的系统,在前向通道中串联比例积分环节,系统误差将变为零。
15、系统稳态误差分为给定稳态误差和扰动稳态误差两种。
16、对于一个有稳态误差的系统,增大系统增益则稳态误差将减小。
17、对于典型二阶系统,惯性时间常数T 愈大则系统的快速性愈差。
18、使用频域分析法,穿越频率越大,则对应时域指标t s 越小,即快速性越好19最小相位系统是指S 右半平面不存在系统的开环极点及开环零点。
20、按照校正装置在系统中的不同位置,系统校正可分为串联校正、反馈校正、 补偿校正和复合校正四种。
自动控制原理部分习题参考答案
Js 2 1 (2) e d () ed 1 ( ) ed 2 ( ) 0 0; 2 s 0 Js K 1 s K 2 s s ( s a) as Kh T T T 3-12(1) S K ;(2) S a ;(3) S h 2 2 2 s as K s as K s as Kh G ( s ) T L 3-13 S H 1 G L (s) K T s ( s 1) 500 T T T 3-14(1) S K (2) S K ; (3) S G 1 1; 2 1 2 s ( s 1) 500 T K1 s s 500 3-15(1) (a) h 0.01 ; (b) h 0.364 ; (c) h 0.099 ;
2-8 2-9
2-10(1) G c1 ( s ) (2)
K T2 T3
R1C1 s 1 U (s) R C s 1 , G c2 ( s ) 2 2 2 RC1 s U 1 ( s) RC 2 s
( s ) K ( 2 s 2 1s 1) ,其中 U r ( s ) T4 s 4 T3 s 3 T2 s 2 T1s 1
R C K K R 2 C 2 K 1 K m RC1 K 2 1 , 1 C1 R1 C 2 R2 , 2 C1C 2 R1 R 2 , T1 1 1 1 m K1 K1 K m R2 2 C1C 2 K 2 K p RC1 (Tm C 2 R 2 ) K 1 K p K m C1C 2 R1 R 2 K1 K p K m RC1C 2 ( RT p RTm K 2 K p Tm R 2 ) K1 K p K m
1 s 2 (s a)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
红色为重点(2016年考题)
第一章
1-2 仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
解当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机反转带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如下图所示。
1-4 题1-4图为水温控制系统示意图。
冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。
冷水流量变化用流量计测量。
试绘制系统方块图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么?
解工作原理:温度传感器不断测量交换器出口处的实际水温,并在温度控制器中与给定温度相比较,若低于给定温度,其偏差值使蒸汽阀门开大,进入热交换器的蒸汽量加大,热水温度升高,直至偏差为零。
如果由于某种原因,冷水流量加大,则流量值由流量计测得,通过温度控制器,开大阀门,使蒸汽量增加,提前进行控制,实现按冷水流量进行顺馈补偿,保证热交换器出口的水温不发生大的波动。
其中,热交换器是被控对象,实际热水温度为被控量,给定量(希望温度)在控制器中设定;冷水流量是干扰量。
系统方块图如下图所示。
这是一个按干扰补偿的复合控制系统。
1-5图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量及各部件的作用,画出系统方框图。
解加热炉采用电加热方式运行,加热器所产生的热量与调压器电压Uc的平方成正比,Uc增高,炉温就上升,Uc 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压Uf。
Uf作为系统的反馈电压与给定电压Ur进行比较,得出偏差电压Ue,经电压放大器、功率放大器放大成au后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T°C,热电偶的输出电压Uf正好等于给定电压Ur。
此时,Ue=Ur-Uf=0,故U1=Ua=0,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使Uc保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T°C由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程,控制的结果是使炉膛温度回升,直至T°C的实际值等于期望值为止。
系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压ru(表征炉温的希望值)。
系统方框图见下图。
注意:方框图中被控对象和被控量放在最右边,检测的是被控量,非被控对象.
第二章
2-2 设机械系统如图2—57所示,其中x i为输入位移,x o为输出位移。
试分别列写各系统的微分方程式及传递函数。
解:①图(a):由牛顿第二运动定律,在不计重力时,可得
2-6若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应c(t)=1-e-2t+e-t,试求系统的传递函数和脉冲响应。
2-8 在图2-60中,已知G(s)和H(s)两方框相对应的微分方程分别是
且初始条件均为零,试求传递函数及C(s)/R(s)及E(s)/R(s)。
2-9求图 2-53 所示有源网络的传递函数U o(s)/U i(s)
2-11 已知控制系统结构图如图2-55所示。
试通过结构图等效变换求系统传递函数C(s)/R(s)。
解:
第三章
3-3已知二阶系统的单位阶跃响应为h (t ) =10 −12.5e −1.2t sin(1.6t + 53.1o ) 试求系统的超调量σ%、峰值时间tp 和调节时间ts 。
解:)1sin(111)(22
βωζζζω+---
=-t e t c n t n
ζβarccos = 2
1/
%ζπζσ--
=e
n
p t ωζπ
2
1-=
n
s t ζω5
.3=
6.01.53cos cos 0===βζ
%5.9%2
2
2
6.01/
6.06.01/6.01/
====------ππζπζσe e e
)(96.16
.112
s t n
p ==
-=
π
ωζπ
)(92.22
.15
.35
.3s t n
s ==
=
ζω 或:先根据c(t)求出系统传函,再得到特征参数,带入公式求解指标。
3-6设图3-46是简化的飞行控制系统结构图,试选择参数K 1和Kt ,使系统ωn =6、ζ=1。
分析:求出系统传递函数,如果可化为典型二阶环节形式,则可与标准二阶环节相对照,从而确定相应参数。
解 对结构图进行化简如图所示。
3-10已知系统的特征方程,试判别系统的稳定性,并确定在右半s 平面根的个数及纯虚根。
(1)0483224123)(2
345=+++++=s s s s s s D
解:483224123)(2
345+++++=s s s s s s D =0
列劳思表:S 5 1 12 32
S 4 3 24 48 S 3
3122434⨯-= 32348
316⨯-= 0 S 2
424316
4
12⨯-⨯= 48
S
1216448
12
0⨯-⨯= 0 辅助方程 124802s +=,
S 24 辅助方程求导:024=s S 0 48
系统没有正根。
对辅助方程求解,得到系统一对虚根 s j 122,=±。
(2)0108-7-44-4s )(2
3456=+++=s s s s s s D
列劳思表:
系统不稳定。
3-12 已知系统结构图如图所示。
试用劳思稳定判据确定能使系统稳定反馈参数τ的取值范围。
解:系统的开环传递函数为:
所以τ>0。
3-13已知单位反馈系统的开环传递函数:
(1)
G (s ) =
(3)
100) +6s + (s s 12s 10 =
G (s) 22)(
试求输入分别为 r (t ) = 2t 和 r (t ) = 2 + 2t +t 2 时,系统的稳态误差。
(1)因为是二阶系统,且系数大于零,所以系统稳定。
0 = G(s)s
0→s lim = Ka 0 = sG(s) 0→s lim = Kv 20 = G(s) 0→s lim
= p K 2
,,
(3)应先检查系统的稳定性。
0.1 = G(s)s 0
→s lim = Ka ∞= sG(s) 0→s lim =Kv ∞= G(s)0→ s lim =
Kp 2
,,
第四章
4-2 已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。
另附其他地方例题:
4-3 设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d)。
4-5设单位反馈控制系统的开环传递函数如下,要求:
(1) 确定)
10)(1(s *
++=s s s K G )(产生纯虚根的开环增益值。
4-8 设反馈控制系统中1)(,)
5)(2(s 2*
=++=s H s s s K G )
( 要求:
(1) 概略绘出系统根轨迹图,并判断闭环系统的稳定性;
(2) 如果改变反馈通路传递函数,使H(s)=1+2s ,试判断H(s)改变后的系统稳定性,研究由于H (s )改变所产生的效应。
第五章
5-2若系统单位阶跃响应c(t)=1-1.8e -4t +0.8e -9t ,试确定系统的频率特性。
5-8绘制下列传递函数的对数幅频渐近特性曲线
(1))1s 8)(1s 2(2s)(++=
G (2))
110)(1(200
)(2++=s s s s G
(1)
(2)
5-17根据题5-8所绘对数幅频特性渐进曲线,近似确定截止频率ωc ,并由此确定相角裕度γ的近似值。
5-9已知最小相位系统的对数幅频渐近特性曲 线如图所示,试确定系统的开环传递函数。
(右图中的10000→100,100→1)
//()10(21)()10(2
1)10(21)
t T nT T
n
e t e nT =-=-=-
(2)系统的开环脉冲传递函数:
1211
21
1122.57
()(1)[
]
(1)
(1)22.57(1)[](1)(1)()1(1)
22.57[]
(1)()
G z z Z s s z e z
z z z z e e z z e ------=-+-=------=--- 特征方程为:1()0G z +=
令1
1
w z w +=-并运用劳斯判据,可知系统不稳定。