TGO_ASC基线格式详解
TGO使用手册(新版).
Trimble Geomatics Office (TGO) 使用简介一、启动点击TGOffice图标,出现如下界面(图1所示):图1 软件启动后的界面二、建立新项目点击建立新项目菜单,并为新项目取名,如图2所示。
图2 新建项目界面三、模板编辑与观测数据导入输入项目路径和名字,选择项目模板为Metric,编辑项目属性,选择坐标系统,计算单位和格式,投影点经纬度和高程,检查限差设置。
点击文件 导入, 选择数据所在位置、数据类型(对于Trimble,选择*.data,如图3、4所示),输入观测数据后确认或修改点名和天线高。
按确认键后进入网图界面,如图5所示。
选择一坐标推算起点,编辑和修改各基线方向(单击需要修改的基线,点击右键进入基线属性选择,选择“反向观测方向”,确保坐标推算方向的正确性。
图3 数据类型选择界面图4 数据导入界面图5 数据导入后的网型界面四、基线解算点击“处理--〉处理GPS基线”菜单,开始基线解算。
基线解算过程界面如图6所示。
保存解算正确的基线(比率应大于3,否则解算失败,检查原因)。
查看解算报告,有错误提示,修改错误后重新解算。
对于解算失败的基线,可以调整截止高度角,剔除观测质量差的卫星,剔出质量查的时段等,重新解算。
图6 基线解算界面五、时间线(timeline)的使用点击“视图-〉timeline”进入下图卫星及时段编辑界面,如图7所示。
单击接收机名后出现本接收机观测到的所有卫星名,用右键可进入卫星使用或禁用选择,还可以显示该卫星的方位角、高度角、相位观测、多普勒观测值时程曲线、信噪比、接收机钟差等。
选择某卫星时段图,按下左健不松开,拉框选择时段,可作选择或禁用该时段的选择。
点击测站名,用右键可以修改天线高,还可以查看该站天空卫星图,如图8-12所示图7 时间线(timeline)界面图8 相位观测时程图图9 L1固定范围图10 卫星2信噪比图11 卫星运行图图12 卫星DOP预报图点击基线报告,查看每颗卫星的观测值残差图,据此可以发现观测质量差的卫星或时段,如图13所示。
CosaGPS基线解文件格式说明
CosaGPS 基线解文件格式说明1 CosaGPS 基线文件格式Z Y Z X Y X Z Z Y Y X X Z Y X ∆∆∆∆∆∆∆∆∆∆∆∆∆∆∆σσσσσσ222终点起点……每条基线向量占一行,基线向量的各分量的单位为米,其方差/协方差的单位是平方厘米。
2 TGO 基线文件格式TGO 软件可以根据用户指定的格式输出基线数据,输出CosaGPS 相兼容的数据格式的操作如下(详情参见TGO 使用说明书):1). 选主菜单 File / Export(导出)2). 选 Custom / New format (自定义/新格式)创建新格式3)按下图所示定义格式文件Name: CosaGPSExport from: GPS V ector data (中文版:GPS基线向量)中间大方格(Format body)的内容应在一行内输完,如下:[From Point Name:10] [To Point Name:10] [DeltaX:15.3] [DeltaY:15.3] [DeltaZ:15.3] [CovarianceXX:20.14] [CovarianceYY:20.14] [CovarianceZZ:20.14] [CovarianceXY:20.14] [CovarianceXZ:20.14] [CovarianceYZ:20.14]4) 采用该格式输出即可3 Leica(SKI)基线文件格式惠州蓄能电站 HXGPS.ASC@%Unit: m@%Coordinate type: Cartesian@%Reference ellipsoid: WGS 1984@#IIHX01 -2418079.6658 5340185.2215 2506648.5171 REF 12 @+IIHX01 -2418079.6658 5340185.2215 2506648.5171@-IIHX04 491.8749 170.0037 150.1425@= 0.5973 0.00000022 -0.00000026 -0.00000009 0.00000076 0.000000250.00000019@: 0.1860 0.0000@; 0.1880 0.0000@*07.08.2004 13:22:00@E 0.0027 0.0027 1.1268 0.0027@+IIHX01 -2418079.6658 5340185.2215 2506648.5171@-IIHX02 256.9183 -8.9831 269.9011@= 0.5893 0.00000022 -0.00000026 -0.00000009 0.00000076 0.00000025 0.00000020@: 0.1860 0.0000@; 0.1880 0.0000@*07.08.2004 13:22:00@E 0.0033 0.0033 -0.6634 0.0033@+IIHX01 -2418079.6658 5340185.2215 2506648.5171@-IIHX05 255.2602 283.4765 -304.5502@= 0.6426 0.00000022 -0.00000026 -0.00000009 0.00000076 0.00000025 0.00000019@: 0.1860 0.0000@; 0.1880 0.0000@*07.08.2004 13:22:00@E 0.0034 0.0034 0.7960 0.0034@+IIHX01 -2418079.6658 5340185.2215 2506648.5171@-IIHX08 1708.3375 376.5231 941.5929@=。
4.4 中海达HGO实训教材
4.4中海达HGO2.0HGO 是广州中海达卫星导航技术股份有限公司继HDS2003软件后,在十多年的后处理软件运用与用户体验改进的基础上推出的第二代静态解算软件,目前版本为HGO2.0.1。
中海达GNSS 解算软件HGO 数据处理软件包,专用于对静态采集的GNSS 数据进行系统处理,数据格式可以是中海达独有的*.ZHD,也可以处理RINEX 格式、*.SP3精密星历格式和南方*.GNS 格式。
此外,软件还提供了接收机管理、坐标转换、精密星历下载、RINEX 格式转换和文件合并等工具HGO 静态数据处理的一般步骤包括:1.新建项目,并设置坐标系统、限差;2.导入数据,并编辑文件,修改测站名和天线高等信息;3.基线解算与闭合差验算,并根据残差信息进行调整,直到基线质量合格;4.网平差,输入控制点信息后,完成自由网平差->84约束平差->当地三维约束平差或二维约束平差;5.导出各种解算报告。
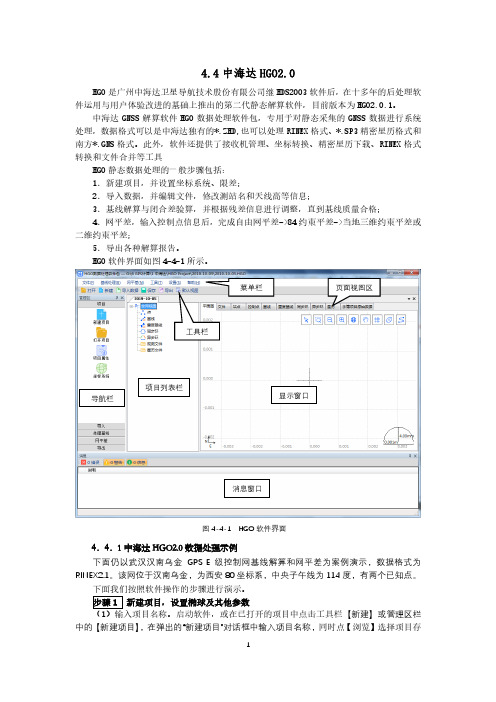
HGO 软件界面如图4-4-1所示。
4.4.1中海达HGO2.0数据处理示例下面仍以武汉汉南乌金GPS E 级控制网基线解算和网平差为案例演示,数据格式为RINEX2.1。
该网位于汉南乌金,为西安80坐标系,中央子午线为114度,有两个已知点。
下面我们按照软件操作的步骤进行演示。
步骤1 新建项目,设置椭球及其他参数(1)输入项目名称。
启动软件,或在已打开的项目中点击工具栏【新建】或管理区栏中的【新建项目】,在弹出的“新建项目”对话框中输入项目名称,同时点【浏览】选择项目存快捷工具菜单栏 工具栏导航栏 页面视图区项目列表栏显示窗口消息窗口图4-4-1 HGO 软件界面放的文件夹,“工作目录”中显示的是现有项目文件的路径,按【确定】完成新项目的创建工作,如图4-4-2所示。
(2)项目属性设置。
按确定后界面弹出“项目属性”对话框,如图4-4-3所示。
的基本信息和限差属性页中按图中填写或选择,高级属性页中的信息默认。
LGO基线解算操作手册
LGO操作手册1,打开LGO软件,2,进入LGO,如图:3,点击项目,将出现如下图形在此处,右击,新建4,将数据导入到LGO中注意文件类型选择:RINEX文件,RINEX文件有三个类型的文件,***.**O,***.**N,***.**G全部选择后,按输入选择刚刚的TEST项目,点击下,使其被选中,然后换到GPS标签上来然后对照开始的时间和仪器号来修改点标识和读取高程,这里的开始UTC时间要比我们的北京时间要小8小时。
修改点号,右击要修改的点标识,然后选择“修改”。
仪器高的修改也是如此,在读取高程处,右击修改即可。
5,基线解算,修改好点号,仪器高后,分配后,如图也可以点查看/编辑标签,查看点位分布情况,查看点位是否有缺失换回到GPS处理标签,在右边的卫星观测数据条,在空白处右击,处理模式:自动处理参数:将显示高级参数勾选上,在附加输出标签中,将残差勾选上,在自动处理标签中,将基线重算勾选上,其他设置按默认的即可。
选择好后,对同一时段的几个点进行选择,如下:然后在卫星条处,右击,处理,,将在结果标签出现如下:全部选择,存储,在这里要看下静态模糊度是否已经确定了。
当然第一次处理时,会有一个点的静态模糊度不确定,因为该点被当成参考点,以解算出其他点的静态模糊度。
在中的基线,选择一条,右击,分析。
,我们在进行分析的时候,需要选择如下类型选择:双差,相位选择L3消除电离层对于卫星图我们需要选择残差>0.1的卫星时段进行删除如上图:G23这颗卫星在16:03-16:13这个时段观测质量不好,我们需要记录下:基线:CPI630——D1-3 G23卫星在16:03-16:13这个时段的数据需要剔除我们再找其他的基线,如基线:CPI631——D1-3G23卫星也在16:03-16:13这个时段的数据需要剔除这个时候,我们可以得出结论,是D1-3在观测G23号卫星时,在16:03-16:13这个时间段的数据不好,需要剔除掉这个时候,我们可以回到GPS处理标签,在D1-3这个卫星条上,右击-卫星窗口出现卫星窗口如下:在此窗口的空白处,右击-开窗(删除),对G23卫星在16:03-16:13进行删除,如下图然后确定就OK了其他的基线也都是这样处理剔除完不好的卫星数据后,再对总个数据进行重新处理一下在GPS处理标签中,右击-处理再查看我们的基线残差是否在0.1以内,如果不是,继续对卫星时段进行剔除3,平差在平差标签下,在空白处,右击网平差计算,右击计算闭合环,然后右击-结果-网,查看网平差报告查看F检验是否接受F检验接受,基线解算和网平差就OK了下一步:基准投影因其比较简单,这个请参照另一操作手册. .。
华测路基超高变化数据格式

华测路基超高变化数据格式
华测路基超高变化数据格式是一种用于收集、存储和传输路基超高变化数据的格式。
它是一种高效的数据格式,可以有效地收集、存储和传输路基超高变化数据。
华测路基超高变化数据格式采用了一种灵活的数据结构,可以支持多种数据类型,包括数值、字符串、日期和时间等。
它还支持多种数据格式,如XML、JSON、CSV等,可以满足不同的应用需求。
华测路基超高变化数据格式还支持多种数据库,可以支持多种数据库系统,如MySQL、Oracle、SQL Server等,可以满足不同的数据库需求。
华测路基超高变化数据格式还支持多种数据交换格式,可以支持多种数据交换格式,如EDI、XML、JSON等,可以满足不同的数据交换需求。
华测路基超高变化数据格式还支持多种数据分析工具,可以支持多种数据分析工具,如SAS、SPSS、R等,可以满足不同的数据分析需求。
总之,华测路基超高变化数据格式是一种高效的数据格式,可以有效地收集、存储和传输路基超高变化数据,满足不同的应用需求。
基于TGO基线处理问题的解决方法
作者: 徐斐;王晓智
作者机构: 中铁大桥局集团;中铁大桥局集团第一工程有限公司测绘分公司
出版物刊名: 科技传播
页码: 163-164页
年卷期: 2012年 第1期
主题词: TGO 数据处理 GPS周
摘要:本文结合目前TGO数据处理软件不能处理基线的实际情况,通过具体分析该问题的原因,提出了一种使用TGO继续进行数据处理方法,并给出了详细的数据处理办法和注意事项。
该方法经验证,在不改变现有测量设备和软件的条件下,依然可以使用TGO进行GPS观测数据处理,而且成果可以满足工程的控制精度要求。
为广大TGO使用者提供了一个可行的方法。
TGO静态数据处理
TGO静态数据处理快速入门(基线解算与网平差部分)1.创建项目若项目(Project)事先已经创建好,则可以用Open Project直接打开已创建好的项目。
创建项目(1)静态数据处理,应选定Metric(公制)模板。
创建项目(2)设定项目属性设定坐标系统(1)设定坐标系统(2)设定坐标系统(3)设定坐标系统(4)设定坐标系统(5)完成坐标系统的设定后,这里将显示出所设定的坐标系信息。
2.GPS观测数据的导入单击DA T File可导入Trimble系列GPS接收机的原始观测数据。
导入数据(1)选定需要导入的数据文件。
导入数据(2)数据检查(1)数据检查(2)数据检查(3)完成数据导入完成数据的导入后,系统将观测情况用图形方式显示出来。
3. 设定点的注记设置点的注记(1)设置点的注记(2)选定Point Labels (点注记)可进行点的注记形式的设定。
设置点的注记(3)4. GPS 基线处理GPS 基线处理 – 设置GPS 处理方式(1)GPS 基线处理 – 设置GPS 处理方式(2)GPS 基线处理 – 设置GPS 处理方式(3)按下Advanced (高级)按钮,可进行较为复杂的GPS 处理方式的设定。
GPS 基线处理 – 设置GPS 处理方式(4)GPS 基线处理 – 处理GPS 基线(1)选定Process GPS Baselines (处理GPS 基线)按所设定的方式进行GPS 基线处理。
GPS基线处理 – 处理GPS基线(2)GPS基线处理 – 处理GPS基线(3)GPS 基线处理 – 处理GPS 基线(4)GPS 基线处理 – 重新计算报告按下Save (保存)按钮,保存GPS 基线处理结果。
GPS 基线处理 – 警告信息GPS 基线处理结果的质量评定 – 生成环闭合差报告GPS 基线处理结果的质量评定 – 环闭合差报告5. GPS 网的无约束平差GPS 网平差 – 设定基准(无约束平差)GPS 网平差 – 设定平差方式(1)GPS 网平差 – 设定平差方式(2)此处列出的系统中所预置的平差方式,用户既可以选定合适的预置平差方式,也可以建立自己的方式。
TGO解算
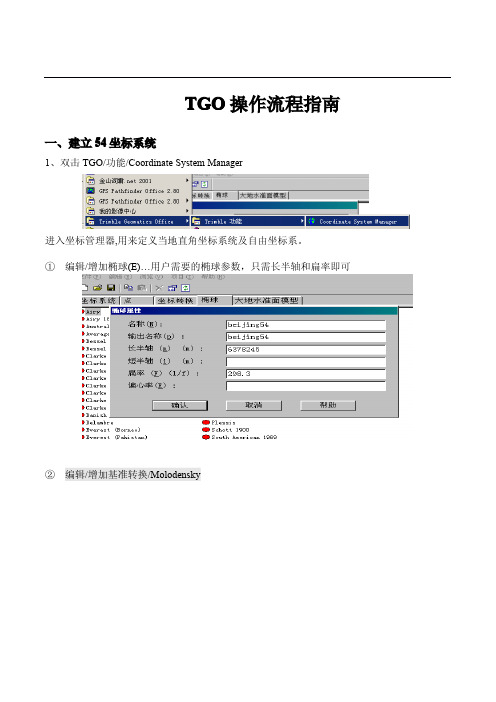
TGO操作流程指南一、建立54坐标系统1、双击TGO/功能/Coordinate System Manager进入坐标管理器,用来定义当地直角坐标系统及自由坐标系。
①编辑/增加椭球(E)…用户需要的椭球参数,只需长半轴和扁率即可②编辑/增加基准转换/Molodensky会出现菜单:选择□创建新的基准转换组,输入如图示③编辑/增加系统坐标组会出现:④然后选择beijing54确定下一步下一步(本地测区中央子午线经度)完成⑤文件/保存⑥文件/退出二、TGO静态解算操作流程1、新建项目此时将自动弹出项目属性对话框,对项目属性进行编辑,主要是坐标系统选择。
也可在文件工具条下项目属性中选择定义好的当地坐标系。
2、导入数据对于已将数据传到硬盘上的来说,以下几项常用:*RINEX文件(*.obs,*.??o):导入标准数据格式文件*GPS数据文件(*.dat)导入TRIMBLE原始数据文件*SSF/SSK文件导入基线文件*Survey Controler(*.DC)导入手簿采集的文件然后,直接从存储数据的文件夹下调入即可。
对于未传的数据:*测量仪器直接将仪器的数据传到该项目中对于其他的格式,包括索佳、NGS文件等据情况选择。
下图顺序为从仪器直接导入数据的情况:单击TRIMBLE图标,可以添加新的设备,包括4700、4600、5700、TSC1、全站仪等设备。
选择com1上的GPS接收机,软件将自动连接接收机或设备,选择需要的数据,传输数据。
数据将自动存储在该项目文件夹下。
如果数据存在硬盘上,则只需选择GPS数据文件,在保存数据的文件夹中找到*.dat的数据文件。
在使用工具条下选择需要的数据,名称中根据文件名输入测站的名称,如果需要高程则要在天线高中输入天线高度。
对于proXR的Rinex文件,机器号要改成不一样,天线类型选COPACT DOME,测量要选天线相位中心或基座底部。
而对于5700,则要选择Zephyr或Zephyr Geodatics,测量方法要选TOP OF NOTCH或BOTTOM OF NOTCH。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TGO_ASC文件格式说明
Flash基线读取流程:
1、找出项目基准点[Observed Coordinates]观测时间最长的GPS点作为基准点
如果没有[Observed Coordinates],则寻找[Stations]中的最接近测区中央的点作为基准点2、读取基线向量[GPS],并查看是否禁用?
2.1数据交换文件详述
基线精度的分析及检核都需要基线解的信息,而在TGO数据交换文件就存储着基线向量等我们感兴趣的信息,其中有项目信息、测站信息、基线向量信息等。
具体详细信息在文件[General]、[Stations]、[Keyed In Coordinates]、[Observed Coordinates]、[GPS]、[Terrestrial]、[Laser]、[Level Run]、[Reduced Observations]、[Azimuths]模块中可见。
在每个模块中信息是以行记录的,各行中的信息是以分号为分割的,各个模块的信息在下文中详细介绍。
在[General]中记录项目的基本信息,有项目的名称、投影基准、坐标系统、大地水准面模型、坐标单位、距离单位、高度单位等信息。
在[Stations]中存储着GPS点的名称、经度、纬度、所在坐标系统下的三维坐标,及该GPS点是否作为已知点还是待求点。
其中,已知点标示方式有固定平面、高度、高程。
在此模块中可看出是否进行了约束平差,下面为此模块中的部分信息示例:
“Station=2:?:G0:13.321107367N:44.281843018E:1552.7786:1473615.641:422176.32 5:1562.4080:1:0:1::”
其中,
第3位:点名,GPS点的名称,如G0。
第4位:纬度,GPS点的纬度,如13.321107367N。
第5位:经度,GPS点的经度,如44.281843018E。
第6位:高度,GPS点的大地高,如1552.7786。
第7位:北坐标,GPS点在项目已定坐标系统下的北坐标,如1473615.641。
第8位:东坐标,GPS点在项目已定坐标系统下的东坐标,如422176.325。
第9位:高程,GPS点在项目已定坐标系统下的高程,即H,如1562.4080。
第10位:东、北坐标的固定状态,当为1时为固定,当为0时未固定。
第11位:高度的固定状态,当为1时为固定,当为0时未固定。
第12位:高程的固定状态,当为1时为固定,当为0时未固定。
在[Keyed In Coordinates]中存储着项目中已知点的坐标及使用状态。
已知点
的信息有平面坐标,高度,高程。
在约束平差后此模块中会有数据,该模块信息如下:
“GridCoord=1:?:G0:1473615.641:422176.325:1562.408:?:C:C:U:E”
第3位:点名,如G0。
第4位:北坐标,如1473615.641。
第5位:东坐标,如422176.325。
第6位:高程,如1562.408。
第7位:高度。
第8位:东、北坐标固定状态,当C为表示使用,当为U时为未使用。
第9位:高程固定状态,当C为表示使用,当为U时为未使用。
第10位:高度固定状态,当C为表示使用,当为U时为未使用。
在[Observed Coordinates]中存储着项目中各GPS点的观测信息,包括点名、经度、纬度、高度、测量仪器类型、测量仪器高时测量到仪器的位置、观测起始日期时间、观测终止日期时间、仪器高等。
该模块信息如下:
“ObsCoord=1:?:A1:13.267867081N:44.193075020E:1214.597:U:0:13 04 2009:06 46 16.0:13 04 2009:08 52 01.0:21:1.585:E”
第3位:点名。
第4位:纬度。
第5位:经度。
第6位:高度。
第7位:GPS点的使用情况。
第8位:测量到,即在TGO的属性中仪器高测量到的具体位置,如测量到天线底座、天线相位中心等;不同型号的仪器在测量到的选项是不一样。
当为-1时指选中第一项,当为0时指选中第二项,当为1时指选中第三项。
第9位:观测起始日期,是以通用协调时(UTC)时,表示方式为“日月年”,如13 04 2009。
第10位:观测起始时间,表示方式为“时分秒”,如06 46 16.0。
第11位:观测终止日期,表示方式为“日月年”,如13 04 2009。
第12位:观测终止时间,表示方式为“时分秒”,如08 52 01.0。
第13位:仪器类型,不同仪器有不同的仪器型号,如21表示Trimble4600仪器。
第14位:仪器高,所量测GPS点到仪器的高度。
在[GPS]中存储着各GPS基线向量的信息。
包括基线的起始点号和终止点号、三维坐标分量和协方差因子、起点仪器高和终点仪器高、比率、RMS、参考方差、观测起始日期时间、观测终止日期时间、基线的使用状态。
该模块信息如下:
“Vector=1:?:1:2:-287.1675:-110.8111:116.5489:.00000012:-.00000006:-.00000001:.0 0000056:.00000025:.00000054:.000:.000:Postprocessed:32.9:.005:1.795:02 06 2006: 02 37 02.0:02 06 2006:03 29 02.0:E:Static or fast static:Static or fas t static:Fixed:L1”
第3位到第4位:基线起始点号和基线终止点号。
第5位到第7位:分别为基线的三分量,x分量、y分量、z分量。
第8位到第13位:是协方差因子。
第14位到第15位:分别为基线起点仪器高,基线终点仪器高。
第17位:比率。
第18位:RMS。
第19位:参考方差。
第20位到第21位:起始日期(日月年)和起始时间(时分秒)。
第22位到第23位:终止日期(日月年)和终止时间(时分秒)。
第24位:TGO中基线的使用状态,当为E是表示使用基线,为C时表示允许检查基线,位D时表示禁止使用基线。
第25位:处理类型,有三种情况:"Static or fast static","PPKinematic","RTK"。
第26位:测量方法,分以下情况"Topo","Continuous","Observed Control","Rapid","Static or fast static","Event","Stop and go"。
第27位:基线解算固定状态,有以下状态"Unknown","Code","Mixed","Float","Fixed",其中当为Fixed时为固定解,当为Float时为浮动解。
第28位:基线解算类型,有"Unknown","L1","L2","L2 Squared","Wide Lane","Narrow Lane","Iono Free"类型。
数据交换文件中还存储着其他信息,在实际应用比较少,故不作介绍。