基于PAC运动控制系统方案
GE PAC运动控制介绍

• IC694TBB032 拧紧式端子排* • IC694TBS032 弹簧式端子排*
光纤连接的扩展 I/O
可靠性
• 唯一的ID 号可以在连错 PMM模块时识别错误 • 通过光纤连接 PACMotion 控制器模块,可以抗干扰 • 24 VDC 电源可以在极性接错的时候保护 • 光电隔离的24V I/O
Read Status
返回轴运动的详细状态
© 2005 GE Fanuc Automation (All Rights Reserved)
20 GE Fanuc FTB VOC
2020/3/4
PACMotion 系统概貌
Proficy ME 编程软件 (Version 5.9 or later)
© 2005 GE Fanuc Automation (All Rights Reserved)
18 GE Fanuc FTB VOC
2020/3/4
强大的运动程序编辑工具
PLCopen 运动功能块
Basic • Read Parameter • Write Parameter • Set Position • Read/Write I/O • Error Reset • Absolute Move • Relative Move • Superimposed Move • Jog • Homing • Stop Advanced • Cam In/Out • Gear In/Out • Gear In Position • Phasing • Synch Start • Delayed Start
2020/3/4
2008年10月7日
PACMotion 正式发布
© 2005 GE Fanuc Automation (All Rights Reserved)
基亏PAC的电机控制器快速控制原型的研究
电 动 汽 车 用 电 机 控 制 器 的 开 发 具 有 小 批 量 、 向不 同 对 面 象 的特 点 , 此对 开 发 方 法 应 具 有 周 期 短 , 本 低 的 特 点 , 因 成 同
1 NI o a t I P mp c O AC 平 台 C R
可 编 程 自动 化 控 制 器 ( A ) 集 计 算 机 技 术 、 P C是 自动 控 制
me o r t e p r n n g e y c r n u t r, i a e r s n h mp e n a in o RCP f rmoo -o t l r h t d f h e ma e tma n ts n h o o smoo t s p p r p e e t t e i lme tt f o h o o tr n r l , c oe b s d o mp c 1 . r v dt a AC b s dRP t o p l a l u l tr o t l r o l crcVe il . a e nCo a t 0 I i p o e t R ts h P - a e C meh d i a p i b e t b i mo o - n r l r e t - h c e S c o d c oef E i Ke r s P y wo d : AC;L b EW P a VI F GA ;mo o t l a i o t lp o oy ig orc n r ;r p d c n r r tt p n o o
p p r rp s sameh dfr a e o o e to o Ra i o t l rttpn ( CP)o trc nrl rb sdOl o a tRI r ga p pd C nr ooy ig R oP fmoo o t l ae iNIC mp c O P rmma l oe . o be Auo t nCo tolr( AC) Af r ec b tmai nrl o e P . t sr e出eathtcuea dfn t n f h ed i r i tr n ci s ePAC,a dteFedO e tdC nrlF c e u o ot n il r ne o t ( OC) h i o
基于虚拟机的PAC控制系统的研究与设计
现 P C控制 系 统高 效采 集大 量信 息 的功 能 。 A 除此 之 外 , 系统 设 计 了 J A T G接 口, 可 以对 既 目标 系统 进 行 测试 , 可 以对 目标 系统 的存 储 单 也
元进 行 编程 。 为 了有 效 地 节 约 显 示 设 备 的 成 本 , 设计 了 V A P C G A K接 口以扩展 V A输 出接 口。 G 3 P C控 制 系统软 件 平 台 A
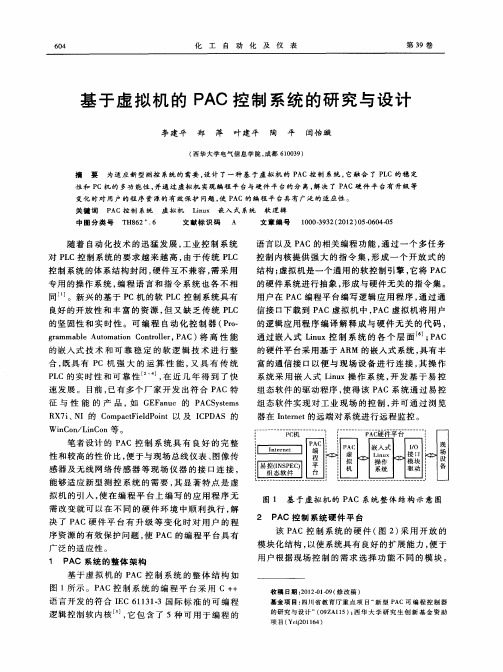
基 于虚 拟 机 的 P C控 制 系统 的整 体 结 构 如 A 图 1 示 。P C控制 系统 的编 程 平 台采 用 C+ 所 A + 语 言开 发 的符合 I C6 1 13国 际标 准 的可 编 程 E 13 . 逻 辑控 制软 内核 , 包 含 了 5种 可 用 于 编 程 的 它
性和 P c机 的 多功 能 性 , 并通 过 虚 拟 机 实现 编程 平 台 与硬 件 平 台 的 分 离 , 决 了 P C硬 件 平 台有 升 级 等 解 A 变 化 时 对 用 户 的 程 序 资 源的 有 效 保 护 问题 , P C 的 编程 平 台 具有 广 泛 的适 应性 。 使 A
依赖 关 系 , m k I g # a ez mae命 令编 译 内核 生 成 要 下 载 到 目标 系 统 的 AR iu M Ln x内 核 映 像 文 件 z I m-
化
工
自 动 化
及
仪 表
第3 9卷
基 于虚 拟 机 的 P C控 制 系统 的研 究 与 设 计 A
李 建平 郑 萍 叶 建平 陶 平 闫怡璇
( 华 大 学 电 气信 息 学 院 , 都 6 0 3 ) 西 成 10 9
摘 要 为 适 应 新 型 测 控 系统 的 需要 , 计 了一 种 基 于 虚 拟 机 的 P C控 制 系统 , 融 合 了 P C的 稳 定 设 A 它 L
基于PAC的测控系统设计与实现
基于PAC的测控系统设计与实现黄定卫;赵新华;赵建伟;周崇阳;黄晓飞【摘要】为实现某化学分析测量仪器自动化测控需求,设计并组建了一套基于工业计算机与可编程自动化控制器(programmable automation controller,PAC)的测控系统;系统上位机通过以太网监控下位机的运行状态,实时显示该仪器中电磁阀开关状态、温度、压力和流量等参数信息;下位机按仪器流程需要设定控制程序,实现对各单元设备的控制和数据采集;并通过设计基于工作流程的数据结构、模块化开发和多线程等技术,编制了系统测控软件;系统具备工作流程定制、数据自动记录、自动报警和自动运行等功能,成功与用于该仪器中;经过多次实验验证和现场工作,测控系统稳定可靠.【期刊名称】《计算机测量与控制》【年(卷),期】2015(023)007【总页数】3页(P2321-2323)【关键词】PAC;控制程序;测控系统;多线程技术【作者】黄定卫;赵新华;赵建伟;周崇阳;黄晓飞【作者单位】西北核技术研究所,西安 710024;西北核技术研究所,西安 710024;西北核技术研究所,西安 710024;西北核技术研究所,西安 710024;西北核技术研究所,西安 710024【正文语种】中文【中图分类】TP3为了满足不断增长的机器和工业控制系统开发需求,处于领先地位的自动化厂商开发出新一代的工业控制器,即可编程自动化控制器(Programmable Automation Controller,PAC),该控制器结合了PC处理器、RAM和软件的优势,以及PLC固有的可靠性、坚固性和分布特性,非常适合于工业环境,具有可伸缩性,易于维护和具有较低的发生故障时间等特性,极大地满足了现代工业应用中愈来愈多的复杂需求。
某化学分析测量仪器,运行过程中有以下需求:1)测量:实时监测、跟踪并记录相关系统的状态参数;2)控制:被控单元控制,可定制控制时序,按控制时序自动或交互控制方式完成系统操作。
运用PAC架构整合Machine Vision与分散式运动控制系统概要
運用P A C架構整合M a c h i n e V i s i o n與分散式運動控制系統「機台自動化暨運動控制」應用論壇INVITATION根據政府2008國家發展重點計劃,規劃推動『兩兆雙星產業』,繼半導體、平面顯示器產業後,機械業可望成為台灣第3個兆元的明星產業。
經濟部選定機械零組件、光電及半導體製程設備以及智慧機器人產業,作為主力機械產業及新興產業,預定3年內輔導建立旗艦型企業,營業額皆達到百億元的水準。
科技日新月異,現今的工廠作業模式已不像早期以人工的經驗來量測及管理工廠事務,隨著圖控軟體與影像監控科技崛起,工廠自動化設備已成為工廠管理者不可或缺的生產利器。
因應巿場的快速變化,TOSEA特別邀請工研院南分院雷射應用科技中心張方副主任與各位分享『雷射技術在光電產業之發展趨勢及應用』,讓各位一窺主力產業的未來面貌;財團法人精密機械中心自控應用部陳瑞琪經理也將分享『服務型機器人產業概況與趨勢』,期望讓各位對於服務型機器人的產業趨勢及相關技術應用有更深入的了解。
研華科技也將於會中分享研華產品在機台自動化領域的應用,其中包含『新世代機台自動化控制系統(PAC)、分散式控制系統解決方案(AMAX 2.0)及利用嵌入式控制平台提升機台穩定度(UNO)』;此外,亦邀請到在機器自動化的合作夥伴前來共襄盛舉,內容涵蓋機器自動化領域的各個解決方案及應用案例分享,期望透過學術與實務的完美結合,找出精密機械業的發展利基,攜手共創亮麗未來。
歡迎蒞臨參加!!台灣光電與半導體設備產業協會理事長余宗澤敬邀【研討會議程】創新體驗:分散式控制系統解決方案新興應用:利用嵌入式控制平台提昇機創新體驗:分散式控制系統解決方案(AMAX 2.0)新興應用:利用嵌入式控制平台提昇機創新體驗:分散式控制系統解決方案(AMAX 2.0) 研華工業自動化事業群主辦單位:台灣光電與半導體設備產業協會、工研院、財團法人精密機械中心 協辦單位:研華科技✂-------------------------------出 席 回 函----------------------------------【TOSEA 會員免費參加;名額有限,額滿為止】為使活動順利,請於96年10月26前,以傳真或E-mail 回函報名。
基于PAC的多轴运动控制系统设计
1 1 6
重 庆 理 工 大 学 学 报
括 G E P A C( p r o g r a m ma b l e a u t o m a t i c c o n t r o 1 )R X 3 i
泛 的适用 性 。这 也 说 明在 运 动 轨 迹 控 制 系统 中 ,
很 多传统 意义 上 的设备 解 决 方案 已经 逐 渐被 以嵌
P ME编程软 件进 行程 序设计 和 i F I X软件进 行 组 态控 制界 面的设 计过 程 。结 果表 明 : 以i F I X和
R X 3 i 控制器分别作为软、 硬件 实现开发界面来对运动 系统进行控制具有较好 的易控性 。
关 键 词: 运 动控 制 ; I F I X组 态软 件 ; 开发界 面 ; 稳 定 性
1 系统 总体 结构
控制 系统 包含 硬 件 和 软件 。硬 件 部 分 主要 包
件 制作 运动 控 制 界 面 的监 控 画 面 组态 , 能 起 到 实
时监控 多轴 运 动状 态 的 目的 一 。系 统 总体 构 成
如 图 1所示 。
F S S B线
自 伺服 驱 动 器
自 伺 服 驱 动 器
( 铜 陵学 院 电气 工程 学 院 , 铜陵 2 4 4 0 0 0 ) 摘 要: 以三轴 运动控 制 系统 为研 究对 象 , 以G E R X 3 i 集成 伺服控 制 系统 为 实验 平 台, 采用
硬件 和软件 设计 相 结合 的方 法进 行 设计 。介 绍 了 R X 3 i 集 成控 制 系统硬 件设 计 , 以及如 何 利 用
2 0 1 7年 4月
Ap r .2 0 1 7
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 4 - 8 4 2 5 ( z ) . 2 0 1 7 . 0 4 . 0 1 9
PAC控制系统的安装调试方法

PAC控制系统的安装调试方法引言控制系统是工业生产过程中必不可少的一部分,而PAC(可编程自动化控制器)控制系统作为一种先进的控制技术,越来越广泛地应用于各个领域。
本文旨在介绍PAC控制系统的安装调试方法,帮助了解PAC控制系统并进行成功的部署和调试。
安装前准备在开始安装PAC控制系统之前,需要做一些准备工作,确保安装过程顺利进行:1. 确定系统需求:了解系统的工作要求和性能指标,从而选择合适的PAC控制器和配套设备。
2. 设计系统拓扑结构:根据实际需求,设计系统的传感器、执行器、网络布线等方案。
3. 准备安装工具和材料:包括螺丝刀、接线器、电缆等工具和材料,确保能够顺利安装、接线和调试。
安装步骤下面是PAC控制系统的安装步骤:1. 安装PAC控制器:根据制造商提供的指南,将PAC控制器安装在合适的位置。
确保控制器固定牢固且通风良好。
2. 连接传感器和执行器:根据系统设计方案,将传感器和执行器正确连接到PAC控制器的输入输出端口。
对于数字输入输出信号,使用合适的接线器和电缆连接。
3. 连接网络:如果PAC控制器需要连接到网络上,使用合适的网络线缆将其连接到网络交换机或路由器。
确保网络配置正确,并测试连接是否正常。
4. 供电测试:连接PAC控制器的电源,确保供电正常。
检查指示灯是否亮起,确认系统能够正常启动。
5. 安装操控面板:根据系统要求,安装操控面板并连接到PAC 控制器。
测试面板是否能够正常与PAC控制器通信。
6. 连接上位机:如果系统需要连接上位机进行程序编程和监控,将上位机连接到PAC控制器的通信口,确保连接正常。
调试方法安装完成后,需要进行系统调试,以确保PAC控制系统正常工作。
下面是一些常用的调试方法:1. 输入输出测试:通过对输入输出信号的测试,验证传感器和执行器的连接是否正确,并测试基本的逻辑控制功能是否正常。
2. 通信测试:测试PAC控制器与上位机、其他设备的通信是否正常。
可使用自带的调试工具或第三方软件进行测试。
PAC
• 开发软件环境: eVC++,/
Industrial Computer Product Data Acquisition System
PAC加值软件简介
• Wincon系列:
–完整软件套件:EzProg-I – EzProg-I
• • • • • • PC端eVC++开发套件:EzHMI/EzCore\EzLIB MA Wincon软件工具: EzConfig/ EzGo/EzMake 可整合轴控&local I/O及remote I/O(FRNet) 系统断电保持参数 AES加密功能 多国语系
7520A7520A->422
Modbus
J2SJ2S-A
变频器
RKC 温控器
一般 IO 拍板 墨轮 板宽
I-8080计数器 8080计数器
Industrial Computer Product Data Acquisition System
PAC Motion应用方案-绕线机 应用方案-
Industrial Computer Product Data Acquisition System
Special Image OS1 Special Image OS2
• 预设出货版本为 Standard Image OS (开机预设语系English),另外随货Recovery DVD 将提供上述三版本之映 像档由客户自由使用 • 凡是非上述三种版本语言或其它客制Image OS之需求, ICP DAS将会依据项目规模收取客制服务费
IEEE 1394
Ethernet
External Trigger
Industrial Computer Product Data Acquisition System
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PAC运动控制系统方案
多电机伺服控制广泛应用于各种电力传动自动控制系统中,如配料、传动等生产过程。
伺服系统中电机控制性能和多电机间协调控制的好坏直接影响生产过程的质量,如何高效管理、方便应用、实时控制是多电机伺服系统生产领域亟待解决的首要问题。
因此,本文提出一种基于CANOpen 总线技术的多轴运动控制数字交流伺服系统。
现场总线技术解决了传统总线插板I/O 模块多,干扰严重、系统软件编写复杂、系统硬件兼容性差等问题。
大大减轻了现场信号连接的繁琐与费用,提高了信号传输的精度与灵活性,给安装、调试和维护带来诸多方便,为现场用户带来巨大的经济效益,代表着自动化领域发展的一个重要方向。
一、CANOpen 总线简介
CAN 的主要技术特点有:
1.是一种多主总线,网络上任一个节点均可在任意时刻主动向网络上其它节点发送信息,多主站依据优先机制进行总线访问;
2.非破坏性基于优先权总线仲裁技术采用非破坏性基于优先权总线仲裁技术结构,大大节省总线冲突仲裁时间,在重负荷下表现出良好性能;
3.具有多种传送数据功能,具有点对点,一点对多点(成组)及全局广播传送数据功能;
4.节点数目多,直接通讯距离最远可达10km(传输速率为5k),最高通讯速率可达1M(传输距离为40m);
5.可靠性高,数据链路层采用短帧结构,实时性高,纠错效果好,每帧信息都有CRC 校验及其它校验措施,数据出错率低,可靠性高;
6.故障自动判别,发送期间若丢失仲裁或因出错而遭破坏的帧可自动重发,暂时错误和永久性故障节点判别及故障节点自动脱离CAN 总线。