基于的汽车防撞机理的研究
《基于制动和转向的智能车避撞控制研究》范文
《基于制动和转向的智能车避撞控制研究》篇一一、引言随着智能交通系统的快速发展,自动驾驶汽车逐渐成为未来交通的重要趋势。
避撞系统作为自动驾驶汽车的核心技术之一,对于提高行车安全性和减少交通事故具有重要意义。
本文将重点研究基于制动和转向的智能车避撞控制技术,探讨其原理、方法及实际应用。
二、智能车避撞控制技术概述智能车避撞控制技术主要通过传感器、控制器和执行器等设备实现车辆的自主避障和避撞。
其中,制动和转向是两种主要的避撞手段。
制动系统通过调整车辆制动力度,使车辆减速或停车,以避免碰撞;转向系统则通过改变车辆的行驶方向,使车辆绕过障碍物。
这两种手段在智能车避撞控制中相互配合,共同保障行车安全。
三、制动和转向的避撞控制原理1. 制动避撞控制原理制动避撞控制主要通过传感器检测车辆与障碍物之间的距离,当距离小于安全阈值时,控制系统会发出制动指令,调整制动力度,使车辆减速或停车,以避免碰撞。
此外,制动系统还可以根据障碍物的速度、大小和类型等信息,进行智能化的制动策略调整,提高避撞效果。
2. 转向避撞控制原理转向避撞控制主要通过传感器检测车辆周围的障碍物信息,通过算法计算出最佳的转向路径和转向角度,使车辆绕过障碍物。
转向避撞控制需要考虑车辆的动力学特性、道路条件、车速等因素,以确保转向过程的稳定性和安全性。
四、智能车避撞控制的实现方法1. 传感器技术传感器是智能车避撞控制的核心设备之一,主要用来检测车辆周围的障碍物信息。
常用的传感器包括雷达、激光雷达、摄像头等。
这些传感器可以提供障碍物的位置、速度、大小等信息,为控制系统提供决策依据。
2. 控制器设计控制器是智能车避撞控制的核心部分,主要负责接收传感器的信息,根据一定的算法计算出最佳的避撞策略,并发出指令给执行器。
控制器设计需要考虑多种因素,如传感器的精度、执行器的性能、车辆的动力学特性等。
3. 执行器技术执行器是智能车避撞控制的最终环节,主要负责执行控制器的指令。
汽车主动避撞系统相关技术的调研

汽车主动避撞系统相关技术的调研电子信息与机电工程学院08机械3班梁晓民200824123306摘要汽车工业的高速发展给人类的生活带来了巨大的方便,同时也给人类带来了严峻的交通安全问题。
随着社会的进步,各国对交通安全问题越来越重视,以避免事故发生为目的的主动安全技术也成为了各国的研究重点。
其中汽车避撞控制系统的研究正成为国内外汽车主动安全领域的研究热点之一。
深入展开汽车避撞控制系统的研究对于降低事故发生率、提高交通安全性、减少人员财产损失、促进智能交通的发展方面具有重要意义,同时汽车主动避撞系统敢是车辆实现无人驾驶的关键技术之一。
本文对汽车主动避撞的技术思路、系统结构及关键技术进行介绍。
关键词汽车避撞系统;交通安全;智能交通系统;关键技术前言随着汽车保有量的快速增长,道路交通安全问题已经成为各国政府和社会关注的重要问题,也是智能交通系统(ITS)需要解决的重大问题。
对汽车主动避撞系统的研究是智能交通系统研究的一个方面,汽车主动避撞系统通过对车辆的减速度进行精确控制,以减少车辆在紧急情况下发生碰撞的可能或减轻车辆碰撞的严重程度,对减少交通事故的发生以及降低事故破坏程度都有十分明显的效果。
美国国家高速公路安全委员会(NHTSA)的调研表明,在道路交通致死事故中,因驾驶员过失造成的约占90%,而因车辆故障造成的仅占约3%[1]。
研究表明,借助于主动避撞系统,追尾碰撞降低率可达62%[2]。
欧洲的一项研究表明,驾驶员只要在有碰撞危险O.5秒前得到预警,能避免50%的碰撞事故。
若在1秒钟前得到预警,则可避免90%事故发生[3]。
由此可见汽车主动避撞系统的广阔市场及现实重大意义。
l 汽车主动避撞系统的概念汽车主动避撞技术是指:利用现代信息技术、传感技术等手段,扩展驾驶员的感知能力,将感知技术获取的外界信息(如车速、其它障碍物距离等)传递给驾驶员,同时在路况与车况的综合信息中辨识是否构成安全隐患,并在紧急情况下自动采取措施控制汽车,使汽车能主动避开危险,保证车辆安全行驶,从而减少交通事故,提高交通安全性[4]。
基于视觉传感器的防撞技术研究

基于视觉传感器的防撞技术研究随着现代交通工具的普及,交通安全问题已经成为了人们日常生活中一个十分重要的话题。
其中,防撞技术是一项非常关键的研究领域,其主要目的在于提升驾驶员的安全性和行车效率。
基于视觉传感器的防撞技术就是其中一种紧跟科技发展潮流的应用,它是利用视觉传感器采集的图像信息,对行车环境和车辆状态进行分析和处理,从而实现对车辆的自动驾驶控制和车辆碰撞的主动避免。
在这项技术中,视觉传感器是其中的关键设备之一。
它主要是指某种能够采集光学信息的传感器,如摄像头、激光雷达等。
视觉传感器通过对目标的视觉信息获取、分析、处理等步骤,可以实现对车辆周围环境的识别和反馈,提高车辆的感知能力和控制能力。
基于视觉传感器的防撞技术主要包括两个方面:一是目标检测和识别技术,即通过对前方障碍物、车辆和行人等目标进行自动识别和分类,为后续的避碰和控制提供决策;二是基于视觉信息的主动避撞控制技术,即根据目标检测和识别得到的信息,对车辆的速度、转向等参数进行自动调节,实现对障碍物的避让和防撞控制。
基于视觉传感器的防撞技术,与传统的基于雷达或者超声波的防碰撞技术相比,具有以下优势:首先,基于视觉传感器的防碰撞技术,可以采集更加丰富的图像信息,拥有更高的分辨率和识别能力,可以识别出更小和更复杂的目标,提供更全面的驾驶环境信息;其次,基于视觉传感器的防碰撞技术,与传统的防碰撞技术相比具有更好的稳定性和抗干扰性。
这是因为传统的雷达和超声波技术,容易受到雨雪等恶劣天气、建筑物等遮挡物的影响,而视觉传感技术可以通过摄像头的高清图像采集,应对更为复杂的路况环境,具有更好的可靠性和鲁棒性。
最后,基于视觉传感器的防撞技术,能够更好地实现自动驾驶功能。
通过对目标和路况环境的自动识别和处理,可以实现车辆的识别和自动化驾驶控制,提高行车效率和安全性。
综上所述,基于视觉传感器的防撞技术在现代交通中具有极其重要的作用与意义。
未来,随着科技的不断进步,基于视觉传感器的防撞技术将会越来越成熟,为人们的出行安全提供更科学、更有效的保障。
基于超声测距的汽车防撞系统本科毕业论文

本科毕业论文(设计、创作)题目:基于超声测距的汽车防撞系统学生姓名:学号:所在院系:专业入学时间:年月导师姓名:职称/学位:导师所在单位:完成时间:年月基于超声测距的汽车防撞系统摘要近年来,我国高速公路追尾碰撞事故频频发生,而汽车追尾碰撞预警系统在道路行车安全中具有良好的发展前景。
为了减少周围障碍物对驾驶员的干扰,帮助驾驶员感知障碍物的位置能够提前有效的避开。
因此本次设计采用超声波测距系统,作为汽车的安全行驶辅助装置,该系统能够通过语言报警和更为直观的LED显示功能提醒驾驶员注意安全,提高了停车的安全。
本设计的硬件部分主要由主控制电路和超声波发射电路、接收电路电路构成,以及辅助的显示电路、电源电路和语音报警电路等,软件部分则由超声波收发子程序、计时子程序、显示子程序及语音报警子程序等部分组成。
由于超声波在空气中传播速度是固定的,因此本设计由STC89C51单片机来计算超声波从发射到被接收的往返时间,从而计算出传输距离实现实时测量距离的目的。
该设计的电路设计部分合理简单、操作稳定、性能优越、测距速度快、计算方法简单迅速、容易达到实时监控的目的,并且达到了工业实用上的测量误差要求。
关键词:STC89C51、超声波、数码管、语音报警The automotive anti-collision system based on ultrasonic distance measurement Abstract In recent years, highway rear-end collision accident occurred frequently in our country, the automobile rear-end collision warning system has good development prospect in road safety. Around in order to reduce obstacles to the driver's interference, help the location of the driver's perceived barriers can effectively avoid ahead of time. Therefore the design of ultrasonic ranging system, as a car's safety driving assist device, the system can alarm through language and more intuitive LED display to remind the driver pay attention to safety, to improve the safety of parking.Hardware part of this design is mainly composed of main control circuit and ultrasonic transmitting circuit, receiving circuit circuit composition, as well as the auxiliary display circuit, voice alarm circuit and power circuit, software part by ultrasonic transceiver subprogram, timer subroutine and display subroutine and voice alarm subroutine and other parts. Due to the propagation velocity of ultrasonic wave in air is fixed, therefore this design by STC89C51 single chip microcomputer to calculate the round-trip time of ultrasound from launch to be accepted, and transmission distance is calculated to achieve the purpose of real-time measuring distance. Circuit design part of the design is simple and reasonable, superior performance, stable operation range fast computing method is simple, and easy to achieve the purpose of real-time monitoring, and reached the industrial measurement error on the practical requirements.Keywords:STC89C51, ultrasonic, digital tube, voice alarm目录第一章绪论 (1)1.1课题研究的现状和发展历史及意义 (1)1.2汽车防撞系统的发展现状 (2)1.3本课题的主要研究内容 (2)第二章超声波测距的原理 (4)2.1超声波的基本理论 (4)2.1.1 超声波的传播速度 (4)2.1.2 超声波对声场产生的作用 (4)2.2超声波传感器 (5)2.3超声波测距系统原理 (5)2.4测量与控制方法 (6)2.5控制系统方框图 (6)第三章单片机主机系统电路 (8)3.1单片机主电路 (8)3.2复位电路 (9)3.3时钟电路 (9)3.4按键电路 (10)3.5蜂鸣器电路 (10)第四章系统主要硬件设计 (12)4.1方案论证与比较 (12)4.1.1超声波发射电路: (12)4.1.2超声波接收电路 (13)4.2最终方案确定 (15)第五章系统的硬件结构设计 (17)5.1单片机的功能特点及测距原理 (17)5.1.1单片机的功能特点 (17)5.1.2单片机实现测距原理 (17)5.2超声波发射电路 (18)5.3超声波检测接收电路 (18)5.4ISD1700语言模块 (19)5.4.1接线说明 (19)5.4.2按键说明 (19)第六章系统软件设计 (21)6.1系统程序的结构 (21)6.2系统程序的流程 (21)6.3.超声波发送子程序及超声波接收中断子程序 (23)第七章总结 (24)致谢 (25)参考文献 (26)附录1 源程序 (27)附录2 实物图 (32)第一章绪论1.1 课题研究的现状和发展历史及意义随着社会的进步和科技的发展,生活水平和生活质量也日益提高,家庭小汽车拥有量也在随之增加,城市道路汽车拥堵的现状已经成为不可回避的问题。
车辆防碰撞系统AEBS的原理介绍
车辆防碰撞系统AEBS的原理介绍21世纪以来,随着传感器、计算机等技术的快速发展,AEBS得到各跨国车企重视。
不少车辆也装上了此系统。
并且已经逐步引进国内。
(AEBS)自动紧急制动系统定义:自动探测目标车辆,预估出前向碰撞危险,及时发出预警信号提醒驾驶员,并在即将发生碰撞时,控制本车降低车速避免碰撞或减轻碰撞伤害程度的系统。
AEBS系统其工作原理很简单,主要分为三个部分:环境感知、智能决策、执行机构。
目前环境感知传感器部分主要由三种探测技术,分别是:毫米波雷达、激光雷达、视频识别。
三种探测技术各有利弊。
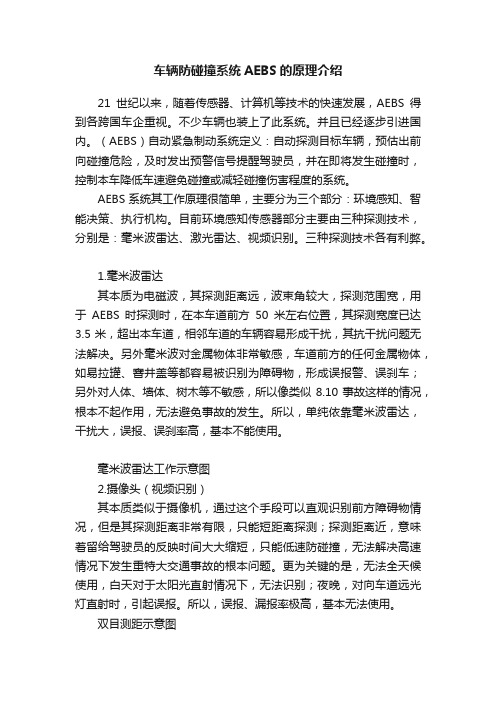
1.毫米波雷达其本质为电磁波,其探测距离远,波束角较大,探测范围宽,用于AEBS时探测时,在本车道前方50米左右位置,其探测宽度已达3.5米,超出本车道,相邻车道的车辆容易形成干扰,其抗干扰问题无法解决。
另外毫米波对金属物体非常敏感,车道前方的任何金属物体,如易拉罐、窨井盖等都容易被识别为障碍物,形成误报警、误刹车;另外对人体、墙体、树木等不敏感,所以像类似8.10事故这样的情况,根本不起作用,无法避免事故的发生。
所以,单纯依靠毫米波雷达,干扰大,误报、误刹率高,基本不能使用。
毫米波雷达工作示意图2.摄像头(视频识别)其本质类似于摄像机,通过这个手段可以直观识别前方障碍物情况,但是其探测距离非常有限,只能短距离探测;探测距离近,意味着留给驾驶员的反映时间大大缩短,只能低速防碰撞,无法解决高速情况下发生重特大交通事故的根本问题。
更为关键的是,无法全天候使用,白天对于太阳光直射情况下,无法识别;夜晚,对向车道远光灯直射时,引起误报。
所以,误报、漏报率极高,基本无法使用。
双目测距示意图3.毫米波雷达+摄像头两种传感器数据融合后对前方车辆或障碍物进行判断,共同认为是障碍物后,方可进行预警或制动,这样组合使用降低了毫米波的探测距离,同时视频识别的短板也都全部存在。
所以组合方式的缺点是:容易受光线干扰,目标识别不准,误报、误刹、漏刹情况严重;无法解决50km/h以上的高速防碰撞问题。
基于DGPS的汽车防撞机理的研究

基于DGPS的汽车防撞机理的研究葛如海;王慧妍【摘要】Road traffic accidents has been the man's first killer,therefore many countries have done many studies in enhancing vehicle safety performance and remarkable results have been achieved in passive sqfety.Collision warning system belongs to active safety,most of our studies are applied to freeway rear-end collisionAn anti-collision warning system based on GPS and inter-vehicle communication is proposed in it, which overall composition and principle is introduced briefly,anti-collision mechanism and the determining of related parameters are emphasized in detail as well as the flow chart of the model is provided finally.This model can achieve a comprehensive anti-collision on general traffic ,which is foreseen with a bright future.%道路交通事故一直是人类的第一杀手,各国在加强汽车安全性能方面做了诸多的研究,其中汽车被动安全已取得了显著的成果.防撞预警系统属于主动安全范畴,我国的防撞预警研究大多应用于高速公路防追尾,于是提出了一种基于车载GPS和车间通信的防撞预警系统.简要的介绍了系统的总体组成和工作原理,重点研究了系统的防撞机理及其相关参数的确定,最后给出了实现防撞模型的流程图.此模型适用于一般路况,可以达到汽车的全面防撞,有着广阔的发展前景.【期刊名称】《机械设计与制造》【年(卷),期】2012(000)001【总页数】3页(P129-131)【关键词】GPS;车间通信;防撞机理;参数确定【作者】葛如海;王慧妍【作者单位】江苏大学汽车与交通工程学院,镇江212013;江苏大学汽车与交通工程学院,镇江212013【正文语种】中文【中图分类】TH161 引言自十九世纪末汽车问世以来,经过一个多世纪的发展,给人们的生活方式、生产方式带来了巨大变化,但也给人们带来了巨大的损失。
汽车自动防撞系统工作原理

汽车自动防撞系统工作原理下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!现代汽车安全性能越来越受到人们的关注,其中自动防撞系统成为了越来越多汽车品牌的标配。
车辆防碰撞系统的应用研究与实现

独 创 性 声 明本人声明所呈交的论文是我个人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得山东理工大学或其它教育机构的学位或证书而使用过的材料。
与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
研究生签名:时间:年月日关于论文使用授权的说明本人完全了解山东理工大学有关保留、使用学位论文的规定,即:学校有权保留送交论文的复印件和磁盘,允许论文被查阅和借阅;学校可以用不同方式在不同媒体上发表、传播学位论文的全部或部分内容,可以采用影印、缩印或扫描等复制手段保存、汇编学位论文。
(保密的学位论文在解密后应遵守此协议)研究生签名:时间:年月日导师签名:时间:年月日摘要随着经济的发展和车辆技术的不断进步,越来越多的人们拥有了自己的汽车。
而伴随车辆的增多,公路道路交通安全形势也越来越严峻,用于汽车安全的车辆辅助系统逐渐受到人们的重视。
车辆安全辅助系统可以在车辆的行驶过程中对出现的紧急情况进行报警和控制,此类系统具有良好的发展前景和广阔的应用空间。
本文使用超声波测距和毫米波雷达测距相结合的方式,根据相应的防碰撞距离算法,利用嵌入式ARM微处理器作为主控单元,设计了一款高性能的汽车主动安全系统。
本系统根据车辆的行驶速度作为依据,分别使用不同的测距方式,当车速低于5km/h的速度时使用超声波检测车距,超过这一速度时,则使用毫米波雷达检测车距。
当车辆距离障碍物距离较近,有可能发生碰撞时,系统将给予报警,从而提示驾驶员注意减速或制动。
本文从理论层面构建了汽车防碰撞系统的总体结构,包括了计算安全距离的算法设计、硬件的设计和软件的设计。
主要内容包括以下几个方面:1)通过对汽车制动的分析,设计出一套防止汽车碰撞的距离检测算法,用于系统判断距离是否安全,并据此对驾驶员进行提醒或警示。
2)完成系统的整体硬件设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:1001—3997(2012)01—0129—02
机械设计与制造
Machinery Design&Manufacture 129
基于DGPS的汽车防撞机理的研究
葛如海王慧妍
(江苏大学汽车与交通工程学院,镇江212013) Research
on
anti—.collision mechanism of vehicle based
4.2
3.2报警规则及评价指标的建立
模型的最终目的是对本车的行驶安全性进行评价,如果两 车行驶到最小安全距离所用的时间l小于等于安全时间to时,则 对本车驾驶员提出警告信息.促使驾驶员采取刹车或转向等措 施.避免交通事故的发生。 驾驶员对于安全性问题的描述属于一个模糊概念,很难用 一般的精确数学模型去描述。通常汽车在道路上行驶的安全性与 两方面有关,一是与前车的问距和两车的相对速度,二是熟练驾 驶员的行车偏差,是一种驾驶过程中不可避免的行车偏差,在此 偏差范围内.没有必要误认为汽车处于非安全状态而进行报警。 为了避免由此引起虚警率的提高,在考虑安全性时,必须把它作 为一个因素考虑在内。这个问题的主要原因是驾驶员操作的不同 和不同汽车性能存在差别的影响导致制动系统起作用时间的不 同,这将直接影响到汽车行驶过程中驾驶员对汽车制动行驶距离 掌握的误差。基于以上两个方面,不采用直接比较两个时间的预
★来稿13期:2011—03一16
标(%弛)和速度(№,”:)。则4车和占车之间的相对距离可以按如
下的式子计算:D4。=、/【‘(Ⅱ。叫12)慨.-'31:2】‘+【t(口.吲:)岬,%】‘(1)
式中:卜耐间变量。
万方数据
130
葛如海等:基于DGPS的汽车防撞机理的研究
第1期
此,当时,评价指标值为0 5,这个值设定为评价指标的门槛值。建 立这个评价指标的好处在于.可以通过一个统一的评价指标对汽 车行驶安全性的不同等级进行判定,而且对于绝对危险及绝对安 全的时刻,评价指标的取值可以保证它们具有不同的相对安全 性,便于后续预警避撞控制系统的开发。
关键词:发动机;冷试;关键技术
≯eters ●-●1r、H^●、H7T’●1h-・1h-●1h-●1hhr●、ddP-¨、一●、H,I、Hd~_1h-●1h-r■、_7●、_dp●●1ho●‘■、
中图分类号:THl6文献标识码:A
1引言
自十九世纪末汽车问世以来,经过一个多世纪的发展,给人 们的生活方式、生产方式带来了巨大变化,但也给人们带来了巨大 的损失。目前,基于对车内乘员保护的汽车被动安全研究成果显 著,而防患于未然的主动安全研究主要集中在高速公路防追尾。此 类系统的丁作原理为:主控单元采集车辆上传感器的信号,计算出 此时与前车的安全距离和实际距离,当实际距离小于等于安全距 离时,则启动报警装置。传感器多采用CCD、雷达、激光等技术来实 现,但是由于它们都存在局限性,比如CCD易受能见度的影响;雷 达容易受到其他车辆的电磁f扰;激光也易受到天气的影响且能 量大,对人眼有很强的杀伤性等,使用效果均不太理想。因此提出 了一种基于DGPs的防撞预警系统,此系统具有如下优点:(1)采 集周边信息时无盲点;(2)利用GPS进行观测,不受任何时间,任何 气候条件的影响,可以全天候不间断地进行工作。随着GPS精度 的提高,完全能够代替光学传感器;(3)低成本。越来越多的汽车上 配备GPS。不必再安装其余的传感器.降低了系统的成本;(4)抗干 扰性好、保密性强。GPS采用数字通讯的特殊编码技术—伪噪声编 码技术,因而其有良好的抗干扰性和保密性。 W IGPS阡线I
两车不发生碰撞的条件为两车之问的相对距离至少大于最 小安全距离D,,则时间变量t的计算方法如下fII:
uI—u2j+㈣呻2j f蜥-u2)f^—乇)+
根据调查,拟采用文献“中的方法,前向安全距离的确定公 式如下:
D,叫+等≥地
(2)
式中:D,—安全距离值m蝴—前车和本车的速度;卜-本车驾驶
员的反应时间,一般为(n3~1.O)s。据有关测试,在正常情况
GE Ru-hai,WANG Hui-yan
on
GPS
(School of Automobile and Traffic Engineering,Jiangsu University,Zhenjiang 21 2013.China)
”’■¨一●,’^●一.^●4”q,●^
【摘要】道路交通事故一直是人类的第一杀手,各国在加强汽车安全性能方面做了诸多的研究, 其中汽车被动安全已取得了显著的成果。防撞预警系统属于主动安全范畴,我国的防撞预警研究大多 应用于高速公路防追尾,于是提出了一种基于车载GPs和车间通信的防撞预警系统。简要的介绍了系
::i一一
两车发生碰撞的条件可以表述为:两车行驶到最小安全距 离所用的时间小于等于安全时间时,系统应启动分级报警装置。
下,车速为40km/h时.驾驶员反应时间为0.6s左右;车速增 加到80km/h,反应时间增加到1.2s左右,选取为l 0B;‰。一 两车的最大制动减速度,车辆制动减速度按照路面附着系 数的平均值来取,干燥路面取为6m,'s2,潮湿路面取为5w/s2, 积雪路面取为2.85.m/shdo—停车安全距离,考虑到安全问 题和系统延迟.两车停止时需保持的距离取为3m,同时国 外也推荐为(厶5)m。
which overall composition and principle is introduced
briefly,anti--collision mechanism
ns
and the determining
ofrehaed modeZ can
parameters
are
emphasized
in如taiZ∞well
k菏
l电f罗盘k
,!墨釜噼叫
,I…’l、
彳尾
图1系统组成
1
装有防撞预警系统的车辆的自车定位信息(经度、纬度、速 度、航向)由GM89一GPS模块测得,他车定位信息由无线电收发 模块nRF905获得。各单元将测得的数据传送至主控单元华邦 W77E58双串口单片机。主控单元将接收到的数据按照如下的安
全判据判断车辆的安全隋况。如果车辆处于危险状态。则启动声
are
warning system belongs to active
s咖ty,most of
applied
to
freeway
rear-end
collisionJl n anti-collision warning system based
GPS and inter-vehicle communication is proposed in it,
光报警装置提醒驾驶员。
3安全模型的建立
3.1安全判据的确定
为了研究方便,碰撞形式只考虑了一车对一车。本车的信息 由车载GPS获得,目标车的信息由车间无线通信获得。如图2所 示。已知的数据:A车位置坐标(戈.,Y。)和速度(“,,口,),曰车位置坐
2系统的组成和工作原理
汽车防撞预警系统的组成,如图1所示。系统包括3个部 分:信号采集单元,处理控制单元,执行单元。
many studies in enhancing vehicle
safety
pe咖删e
on
the删’S first killer,therefore
our
many
countries have done
and remarkable results have been achieved in passive studies
系统采用车载GPS定位,本车将车辆定位数据(经度、纬度、 速度,航向角)传输到控制单元,控制单元储存此数据并通过无线 收发模块将数据以电磁渡的形式发出.同时接收周围车辆的数 据,然后通过计算时问按照上述的报警准则进行报警。具体流程
图.如图3所示。
的要求。隶属函数的形式如下:r=—七丁
1押坩
(3)
据甬数中参数所代表的意义,此处令A;舻2・B,x为隶属函 数特征值.取为两车行驶到最小安全距离所用的时间t。因f爿。
(2Anhui
Jianghuai Automobile Co.,Ltd,Hefei
230009,ChinБайду номын сангаас)
【摘要】发动机作为汽车的核心部件,其装配质量直接影响整车性能,在发动机生产线末端通常; 都安装有试验设备来对发动机装配质量进行检测。发动机冷试技术作为一种新型的发动机装配质量在{
线检测技术,具有测试时间短、精度高、成本低、污染少等优点,在国内被越来越多的汽车厂商引入到发{ 动机装配线上。阐述了冷试的概念及故障映像原理,并详细对冷试中扭矩检测、机油压力检测、正时检{ 测、点火检测、进气真空度检测及排气压力检测关键技术进行了研究。
4相关参数的确定
4.1最小安全距离Dr
图2同一平面坐标下运动的两车
影响汽车行驶安全性的因素主要是本车周围障碍物与本车 的相对距离及其变化。而实际上每个驾驶员都希望以最快的速度 通过某一路段,用最少的时间到达目的地。前向安全距离是指本 车与前车不相撞所需要保持的最小距离。由于在报警规则中采用 了模糊决策隶属函数的方法.所以安全距离取值非常重要,作为 求取隶属度过程中函数的—个参数,它直接影响汽车前方碰撞报 警系统的合理性。
Research
on
key technologies of the engine cold test
LIN Ju-guan91,XU Hual,REN Yong-qiangt,ZHU
Zhen-don92
230009,China)
(1School of Mechanical&Automotive Engineering,Hefei University of Technology,Hefei
警准则.而是引进了改进S型函数l啡为隶属函数对安全性评价