Human Motion Capture System Using Color Markers and Silhouette
基于XSENS传感器的人体上肢动作捕捉系统

• 16•图1 人体上肢右臂关节模型1 人体上肢关节模型• 17•using MYO armband with application to teleoperation:2016;DingX,Fang C.A Novel Method of Motion Planning for an Anthropomor-phic Arm Based on Movement Primitives:IEEE/ASME Transactionson Mechatronics.2013;Xu H,Ding X.Human-Like Motion Plan-ning for a 4-DOF Anthropomorphic Arm Based on Arm’s InherentCharacteristics:International Journal of Humanoid Robotics,2017),具有七个自由度,肩关节中有三个原点重合,方向不同的旋转关节,肘关节中有两个原点重合,方向不同的旋转关节,腕关节中有两个旋转关节。
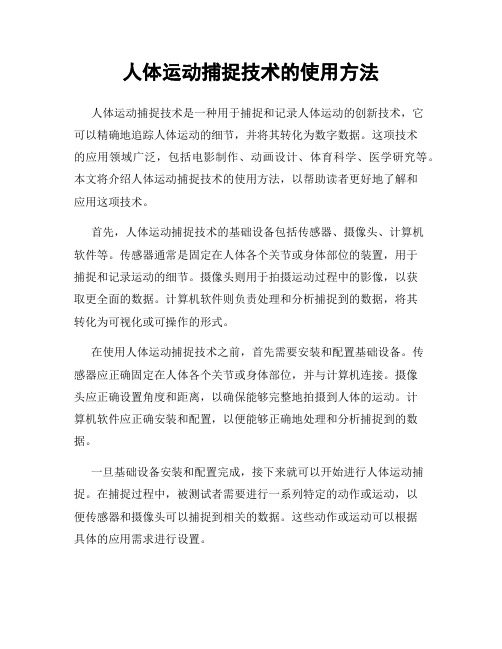
使用D-H方法对人体上肢进行关节建模(K e b r i a P M,A l-Wais S,Abdi H,et al.Kinematic and dynamic modelling of UR5manipulator:IEEE,2016),D-H方法是一种通用的针对复杂构型机器人的建模方法,人体上肢模型如图1所示。
人体上肢右臂上肢关节模型如图1中所示,图1中是背视图,为了方便在图中建立了基坐标系,Lu是上臂的长度,Lf是前臂的长度,Lh是腕关节到手心的距离,如果手中持有执行器,可认为是腕关节到执行器的距离。
图1中坐标系(*)0、(*)1、(*)2表示人手臂的肩关节,三个关节的原点应该是重合的,在图1中为了更好的展示三个关节的坐标系关系就进行了分离,同理对肘关节和腕关节也进行的分离,(*)3、(*)4表示肘关节的两个关节,(*)5、(*)6表示腕关节的两个关节,(*)7表示末端的状态。
Trinamic Motion Control系统用户指南说明书

References
Lipsett, R. A. (n.d.). Thomson Linear Motion Optimized. Retrieved from https:///downloads/articles/Ball_Screws_and_Lea d_Screws_The_Real_World_Difference_taen.pdf
translation stage at startup • Set axis parameters in code to relate motor driver
positioning coordinates to position of translation stage • Further testing of complete system to test for mechanical
stage
Conclusion and Recommendations
Despite lack of testing due to COVID-19, individual components of the delay unit were tested. A large component of the delay unit’s functioning is the software driving the motor. Through lab testing, a USB connection between the computer and motor driver was successfully established, and information can be transmitted to the motor driver by the user. Additionally, the stop switch interrupts were successfully wired and tested. The system was not able to be integrated or tested with the OCT systemduction
facial motion capture原理

facial motion capture原理面部动作捕捉(Facial Motion Capture)是一种通过使用传感器和摄像机来捕捉人脸表情的技术。
它可以记录和分析人脸的运动,然后将这些数据转化为计算机生成的模型或虚拟角色。
这种技术不仅在电影、游戏和动画行业有广泛的应用,也被用于医学研究、人机交互以及虚拟现实等领域。
面部动作捕捉的原理是通过采集人脸的运动数据,并将其转化为计算机可识别的格式。
为了实现这一目标,常用的技术包括以下几个步骤:1. 传感器放置:通常,面部动作捕捉系统使用摄像机和传感器来捕捉面部运动。
传感器可以是红外相机、深度相机或惯性传感器,放置在人脸周围或特定关键点上。
2. 数据采集:面部动作捕捉系统通过传感器实时采集面部表情的数据。
传感器可以追踪人脸的运动、形变和肌肉活动,并将其转化为数字信号。
3. 数据处理:采集到的数据需要进行处理和分析,以提取有用的运动信息。
这可能涉及到人脸识别、关键点追踪、形变分析和语义融合等算法。
4. 数据重建:基于采集和处理的数据,可以重建和生成逼真的三维人脸模型。
这个过程通常包括模型拟合、纹理贴图和光照等步骤,使得生成的虚拟人脸更加逼真。
5. 动画传递:最终的目标是将采集到的面部运动数据传递到虚拟角色或计算机动画模型上。
这可能涉及到数据校准、姿态匹配和关键帧插值等技术,以确保动画的流畅和真实性。
面部动作捕捉的原理基于对人脸表情和运动的准确追踪和分析。
通过传感器的帮助,可以实时地捕捉到人脸的细微变化,包括眼睛、嘴唇、眉毛等部位的运动。
这些数据随后可以被应用于电影、游戏或虚拟现实应用中的虚拟角色,从而使得角色的表情更加生动和真实。
总的来说,面部动作捕捉技术的原理可以总结为传感器放置、数据采集、数据处理、数据重建和动画传递。
通过这些步骤,可以准确地捕捉并传递人脸表情和运动,为电影、游戏和虚拟现实等领域提供更加逼真和沉浸式的体验。
人体静态姿态捕捉技术及应用

人体静态姿态捕捉技术及应用随着科技的不断进步和人们对健康生活的要求不断提高,人体静态姿态捕捉技术逐渐成为引起人们关注的一个新兴领域。
该技术主要是通过计算机视觉、图像处理等技术手段对人体姿态进行识别和分析,进而得到相关的数据和信息,用于研究、评估和改善人体健康状态,具有广泛的应用前景和社会价值。
一、技术原理人体静态姿态捕捉技术的实现主要依靠光学和数字信号处理技术,其基本原理如下:1. 光学扫描技术采用光学扫描仪对人体进行扫描,获取人体表面几何信息和肌肉组织形态等数据,并通过图像处理算法对人体姿态进行识别和分析。
2. 传感器技术通过传感器获取人体运动状态和姿态方向等信息,利用数字信号处理技术对数据进行分析和转换,从而得出人体姿态参数。
二、应用领域人体静态姿态捕捉技术具有广泛的应用前景和社会价值,主要应用于以下领域:1. 医疗卫生领域通过人体静态姿态捕捉技术,可以对人体姿态进行全面分析,从而评估并预防一些疾病的发生,比如颈椎病、腰椎病等。
2. 运动训练领域人体静态姿态捕捉技术可以对运动员的姿态、肌肉协调性等进行评估和监控,指导运动员矫正动作,达到更好的训练效果和成绩提升。
3. 生活健康领域人体静态姿态捕捉技术可用于智能家庭健康管理,对老年人、残疾人等进行健康监护,预防颈椎病、腰椎病等疾病的发生。
三、技术发展趋势近年来,人体静态姿态捕捉技术在应用领域不断拓展,技术也在不断发展,今后的趋势主要表现如下:1. 多模态融合技术将成为重点研究方向,用于提高人体姿态识别和分析的准确性和稳定性。
2. 人工智能技术的应用将进一步促进人体静态姿态捕捉技术的发展,尤其是深度学习、神经网络等技术的不断运用。
3. 人体静态姿态捕捉技术将融入到更多的产品和行业中,如游戏、虚拟现实、无人驾驶等领域,为人们带来全新的体验和便利。
四、结语随着经济的不断发展和人们对健康生活的追求不断提高,人体静态姿态捕捉技术应用价值逐渐得到认可和重视。
人体运动捕捉技术的使用方法
人体运动捕捉技术的使用方法人体运动捕捉技术是一种用于捕捉和记录人体运动的创新技术,它可以精确地追踪人体运动的细节,并将其转化为数字数据。
这项技术的应用领域广泛,包括电影制作、动画设计、体育科学、医学研究等。
本文将介绍人体运动捕捉技术的使用方法,以帮助读者更好地了解和应用这项技术。
首先,人体运动捕捉技术的基础设备包括传感器、摄像头、计算机软件等。
传感器通常是固定在人体各个关节或身体部位的装置,用于捕捉和记录运动的细节。
摄像头则用于拍摄运动过程中的影像,以获取更全面的数据。
计算机软件则负责处理和分析捕捉到的数据,将其转化为可视化或可操作的形式。
在使用人体运动捕捉技术之前,首先需要安装和配置基础设备。
传感器应正确固定在人体各个关节或身体部位,并与计算机连接。
摄像头应正确设置角度和距离,以确保能够完整地拍摄到人体的运动。
计算机软件应正确安装和配置,以便能够正确地处理和分析捕捉到的数据。
一旦基础设备安装和配置完成,接下来就可以开始进行人体运动捕捉。
在捕捉过程中,被测试者需要进行一系列特定的动作或运动,以便传感器和摄像头可以捕捉到相关的数据。
这些动作或运动可以根据具体的应用需求进行设置。
在捕捉过程中,被测试者应确保动作或运动的准确性和自然性。
他们应遵循指示或示例,以确保与实际应用场景的一致性。
同时,被测试者应保持良好的形体和姿势,以便传感器和摄像头能够准确地捕捉到相关的数据。
一旦捕捉到相关的数据,计算机软件就会对其进行处理和分析。
通过算法和计算模型,软件可以将捕捉到的数据转化为可视化的图像或可操作的形式。
这使得用户可以更直观地观察和分析人体运动的细节,并在此基础上进行进一步的应用和研究。
除了基本的捕捉和分析功能,人体运动捕捉技术还可以与其他技术相结合,提供更多的功能和应用。
例如,结合虚拟现实技术,可以实现身临其境的运动体验;结合机器学习技术,可以自动识别和分类不同的动作或运动。
在实际应用中,人体运动捕捉技术可以用于电影制作和动画设计。
基于骨骼约束的人体运动捕捉数据失真恢复

引用 格式:汪亚明,鲁涛 ,韩永华.基 于骨 骼约束 的人体 运动捕捉数据 失真恢复.计算机 系统应用,2018,27(5):17_25.http://www.C—S_a.org.cn/lO03—
3254/6358.htm l
Hum an M otion Capture Data Recovery Based on Skeleton Constraint
http://ww w.C—S-a.org en Te1:+86—10—62661041
基于骨骼约束 的人体 运动 捕捉数据失真恢复①
汪 亚 明 ,鲁 涛 ,韩 永 华
(浙 江 理 工 大 学 信 息 学 院 ,杭 州 310018) 通讯作者 :韩永华,E—mail:hanyonghuahan@163.cor n
,
algorithm .
Key words:MOCAP data recover y;adjacent ma rkers;skeleton constraint term;sprase represention;dictionar y training
运 动捕捉 (Motion Capture,MOCAP)是一 种获取 真 实运 动数据 的技 术,指通过 传感设 备记 录人体 在三 维 空 间中的运动轨 迹,并将 其转化 为抽 象的运动数 据, 最后根据 这些数据驱动物体或者虚拟 人体运 动的技术. 随着虚拟 现实技术的飞速发展,MOCAP已经广泛地应 用 于各 个领域 ,例 如计 算机动 画 、 电脑游 戏 、影 视动
新英汉摄影技术词典
新英汉摄影技术词典前言随着摄影技术的不断发展,摄影领域的专业术语也日新月异。
本词典旨在帮助读者更好地了解摄影技术术语,并在实践中运用。
无论是新手摄影爱好者,还是专业摄影师,都可以在本词典中找到所需的信息和参考资料。
A1. Aperture (光圈)光圈是调节镜头光线的大小,通常用f值表示。
较小的f值意味着更大的光圈,更多的光线进入镜头;而较大的f值意味着较小的光圈,限制光线进入镜头。
2. Auto Focus (自动对焦)自动对焦是指相机能够自动识别并对焦于所选择的目标,而不需要手动调整镜头。
B1. Bokeh (虚化)虚化是指在摄影中通过控制焦距和光圈大小,使得背景模糊,从而突出主体目标。
2. Bracketing (曝光补偿)曝光补偿是指通过连续拍摄同一景物的多张照片,每张照片的曝光参数有所不同,以确保至少有一张符合要求的曝光。
C1. Depth of Field (景深)景深是指摄影作品中清晰焦点与模糊焦点之间的范围,主要受光圈大小、镜头焦距和拍摄距离等因素的影响。
2. Cropping (裁剪)裁剪是指在后期处理中对照片进行裁剪或修剪,从而改变画面的构图和内容。
D1. Dynamic Range (动态范围)动态范围是指相机传感器能够捕捉的亮度范围,通常以光线最暗部分和最亮部分之间的差异来衡量。
2. Double Exposure (双重曝光)双重曝光是指在同一张底片或传感器上连续曝光两次或以上,从而叠加多个场景,创造出独特的效果。
E1. Exposure (曝光)曝光是指相机传感器或胶卷对光线的暴露时间,通过控制快门速度、光圈和ISO等参数来调节曝光量。
2. Electronic Viewfinder (电子取景器)电子取景器是指使用数字信息显示相机镜头捕捉画面的一种取景方式,通常在无反光镜相机中使用。
F1. Fisheye Lens (鱼眼镜头)鱼眼镜头是一种超广角镜头,其视角非常广阔,画面呈现出凸起状,造成鱼眼效果。
Vicon动作捕捉系统操作手册

5
Vicon 动作捕捉系统 操作手册
用于 Vicon 系统和第三方测试系统硬件设备的信息 MX 专用连接线
种类包括: 摄像机——摄像机发光器部分之间的连接线 摄像机或者 MX Ultranet HD——MX Net 之间的连接线 MX Net——MX Link 之间的连接线 MX Link——MX Link 之间的连接线 MX Net 或者 MX Link——PC 主机之间的连接线 校准套件 校准套件即包含 5 个 Marker 点的 T 形校正架,用于精确校准 Vicon MX 系统。 标准配件 Vicon MX 系统标准配件通常包含: 粘贴反光球用的胶 捕捉时穿着的紧身服 软件加密狗 Vicon MX 系统捕捉用反光球,直径分别 9.5 毫米、14 毫米两种规格 1.2.2 硬件的连接 (1)MX 摄像机的调试 Vicon 系统中共 12 台摄像机,应保证安装使用前进行以下调试:光圈一般设置为 2.0~2.5,焦距一般设置为+∞,特别注意外侧的红外线发光圈尽量与镜头外缘保持平齐。
两个 MX Ultranet HD 盒相接好后,找到下方 MX Ultranet HD 盒后方左下部的一排 “GIGABIT ETHERNET CAMERAS”接口中最右边的一个白色标识的“PC”接口,用网线与 PC 连接。
2
Vicon 动作捕捉系统 操作手册
1. 仪器的主要介绍
其中包括,仪器的基本信息,主要部件组成,硬件的安装和设置(应包括硬件的连线说 明等),仪器的应用等。
如果仪器配有相关的工具附件也在此节进行说明。
1.1 仪器简介
英国 Oxford Metrics Limited 公司是世界上一家非常著名的光学动作捕捉(Motion Capture)系统供应商,它的这项技术在 70 年代服务于英国海军,从事遥感、测控技术设备 的研究与生产。进入 80 年代他们将自己在军事领域里的高新技术,逐渐用于民用方面,在 医疗、运动、工程、生物等诸多领域生产制造用于动作捕捉的 Motion Capture 系统。80 年 代末,OML 又将动作捕捉系统技术应用于影视的动画制作领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 2 1
E2 H2 K2 F2
Computer Human motion Video cameras
Fig. 1. Motion capture system.
Fig. 2. Feature points.
I. INTRODUCTION Motion capture[1] is a technique to measure a human motion and posture. This technique is usually used to make computer graphics of moving human in the field of entertainments such as movies, TV games and so on. Moreover, recently, the motion capture techniques are also used in the analysis of the motion of human body and the rehabilitation for the physically handicapped persons[2]. There are many systems for the motion capture such as the mechanical type[3], the magnetic type[4], optical type and so on. However, the mechanical and magnetic types need to equip various sensor devices on a human body, so the human motion is restricted. On the other hand, the optical type need to equip only simple color markers, and since this system measure the human motion from images taken by video cameras, it can acquire more natural motions than the mechanical and magnetic types. In case of this type, if we need to measure many positions of the human body, we should just prepare many different color
0 50 100 150 200 250 300 350
Hue [deg.]
Fig. 4. Histogram of hue in lab room. Fig. 3. Overview of proposed system.
a computer and 2D feature positions on the images and 3D feature positions are estimated. Note that, in this system, the human motion images are recorded in the computer first and then they are processed. Figure 2 shows the measured feature points on the human body. The positions of elbows (E1 and E2 ) and knees (K1 and K2 ) are detected by using color markers, and the center of gravity (G), head (P ), hands (H1 and H2 ) and feet (F1 and F2 ) are detected by using the human silhouette. III. MOTION CAPTURE METHODS In this section, we show our proposed method of a motion capture. The followings show the overview of processes in this system (Fig.3): 1. Initialization. • Acquire a background image. • Estimate distances between human feature points for constraints. 2. Extract 2D coordinates of human feature points. Acquire human images by two cameras and • Extract marker positions using color information, • Extract other feature points using silhouette image, for each image. 3. Estimate 3D positions of feature points using stereo method. 4. Predict 3D coordinates of undetected feature points. 5. Modify 3D coordinates of feature points. 6. Iterate from 2 for continuous capturing. Details are shown in the followings. A. Color Marker Detection In general, a color image consists of the three primary colors, red, green and blue. But, this color representation has the problem of being easy to be influenced of change by brightness
0-7803-9360-0/06/$20.00 ©2006 IEEE
151
Authorized licensed use limited to: Kunming Univ of Science and Tech. Downloaded on May 20,2010 at 10:03:54 UTC from IEEE Xplore. Restrictions apply.
Abstract – In this paper, we discuss the motion capture system which acquire 3D human motion data using camera images. In this system, in order to detect feature points of human’s parts, we use a few color markers and silhouette images of human to be able to move human without restriction. And, we estimate 3D positions of feature points by the stereo method using two cameras. Moreover, when the feature points can not be detected by occlusions, proposed system predict and modify its locations using conditions of constraints about a human body. In the experimental results using real human images, we confirm that the 3D human motions can be acquired stably and accurately under occlusions. Keywords – motion capture, color marker, silhouette, stereo method
IMTC 2006 - Instrumentation and Measurement Technology Conference Sorrento, Italy 24-27 April 2006
Human Motion Capture System Using Color Markers and Silhouette
markers. But, when the same color objects exist in the surroundings of human, the positions of markers can not be detected correctly. Moreover, when a marker is hidden by a human body or some other objects, it will disappear in a camera image. Hence it is difficult to measure the position of the marker in such case. In this study, we discuss the method to measure 3D positions of the feature points in a human body using a few color markers and human silhouette[5]. And, in order to deal with the occlusion and incorrect detection of markers, we also discuss the method to predict and modify 3D positions of the feature points using the constraint conditions about the structure of the human body. In the experimental results, we execute the motion capture using a real video images, and we show the effectiveness of the proposed method which can obtain the 3D positions of the feature points accurately even if some of markers are not appeared in video images. II. MOTION CAPTURE SYSTEM AND HUMAN FEATURE POINTS Figure 1 shows the structure of motion capture system we use. The human images are taken by two video cameras which are located at fixed positions. These images are processed by