块状物品推送机的机构综合与机构设计
物流设施与设备之推块式分拣机
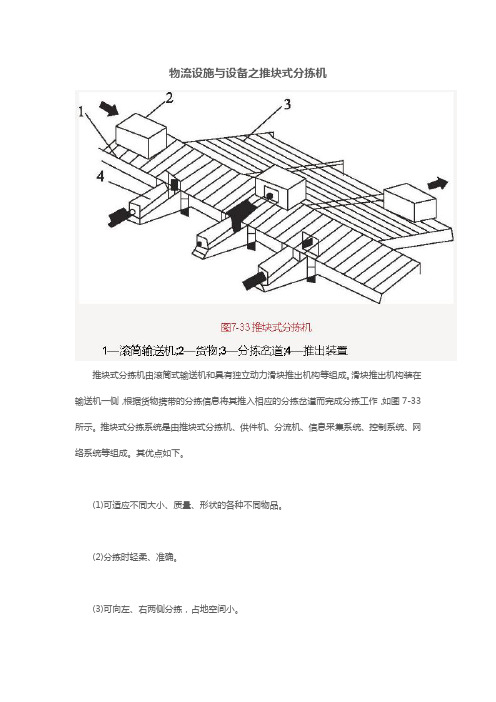
物流设施与设备之推块式分拣机
推块式分拣机由滚筒式输送机和具有独立动力滑块推出机构等组成。
滑块推出机构装在输送机一侧,根据货物携带的分拣信息将其推入相应的分拣岔道而完成分拣工作,如图7-33所示。
推块式分拣系统是由推块式分拣机、供件机、分流机、信息采集系统、控制系统、网络系统等组成。
其优点如下。
(1)可适应不同大小、质量、形状的各种不同物品。
(2)分拣时轻柔、准确。
(3)可向左、右两侧分拣,占地空间小。
(4)分拣时所需物品间隙小,分拣能力高达18000件小时。
(5)机身长,最长达110米,出口多。
机械综合机构设计方案

机械综合机构设计方案机械综合机构是一个集合了多个机械元件和机械连接件的整体结构,用于完成特定的运动或功能。
本设计方案将介绍一个机械综合机构的设计方案,包括设计目标、结构布局、工作原理和设计步骤等。
1. 设计目标本设计方案的目标是设计一个能够完成特定任务的机械综合机构,具备高效、可靠、稳定的工作特性,并且能够满足相关的性能要求。
2. 结构布局机械综合机构的结构布局可以根据具体任务的要求进行设计。
通常包括输入部分、传动部分和输出部分。
输入部分负责接收外部输入的动力或输入力,并将其传递给传动部分。
传动部分负责将输入力进行传递和转换,并将其传给输出部分。
输出部分负责完成特定的任务,将输出力或输出动能传递给所需的工作部件。
3. 工作原理机械综合机构的工作原理可以通过分析输入与输出的关系和传动的方式来进行理解。
通过适当的机械元件和机械连接件的组合和布置,实现输入力或输入动能到输出力或输出动能的转换。
4. 设计步骤(1) 确定机械综合机构的任务需求和性能要求。
(2) 设计输入部分,确定输入方式和输入力或输入动能的传递路径。
(3) 设计传动部分,选择适当的机械元件和机械连接件,并进行传动比的计算和传动方式的选择。
(4) 设计输出部分,确定输出力或输出动能的传递路径,并将其传递给所需的工作部件。
(5) 进行结构布局和尺寸设计,确保机械综合机构的强度和刚度满足要求。
(6) 完成详细的工程设计和图纸制作。
通过以上的设计步骤和相关的分析,我们可以得到一个满足需求和性能要求的机械综合机构设计方案。
在设计过程中要考虑到结构的合理性、工作的可靠性和稳定性,并保证设计的实施性和可制造性。
同时,还要进行相关的计算和分析,确保设计方案的可行性和优化性,通过进一步的实验和测试,验证设计方案的有效性。
推出机构的设计要点

推出机构的设计要点篇一《了解需求,确定基础方向》咱就说这推出机构的设计啊,那可不像搭积木那么简单,得讲究不少要点呢。
我就给大家讲讲我之前经历过的一件事儿,老有意思了。
有一回,我那公司接了个活儿,要给一家玩具厂设计个推出机构,专门用来把做好的小玩具从模具里弄出来。
刚接到这任务的时候啊,我心里还挺美的,想着不就是个推出机构嘛,小意思。
可等我真正去了解需求的时候,才发现这里面的门道多着呢。
我就跑到那玩具厂去实地考察,一到那儿,好家伙,那车间里那叫一个热闹,各种机器嗡嗡响,工人师傅们忙得不可开交。
我就去找负责这个事儿的师傅,让他给我讲讲具体要求。
他就跟我念叨起来,说这玩具啊,大小形状都不一样,有的还特别脆弱,稍微使点劲儿就容易坏了。
而且啊,这生产速度还得快,可不能耽误工夫。
听他这么一说,我才意识到这事儿不简单啊。
咱这推出机构的设计,首先得根据不同玩具的特点来啊。
太小的玩具,推出的力度就得小点儿,还得精准,不然一下子给推飞了那就麻烦啦;大点儿的玩具呢,力度就得大点,但还不能把玩具给弄变形了,这就好比照顾小孩似的,得拿捏好那个分寸。
经过几天的琢磨和计算,我初步确定了设计方向。
根据玩具的尺寸、重量、材质等因素,设计出了一套可以调节推出力度和方向的机构。
比如说,有个小玩偶,身体软软的,那我设计的推出机构就会轻轻地把它从模具里推出来,就像妈妈温柔地抱起宝宝一样;要是个比较结实的大玩具车,那推出的力度就会稍微大一点,就像大力士搬东西似的,但也不会太猛。
反正啊,就是得具体问题具体分析,根据实际需求来确定设计的基础方向,这样咱这推出机构设计出来才能好用。
篇二《注重细节,优化设计方案》推出机构设计这事儿啊,光确定了方向还不够,细节那也得把握好,这我可是深有体会的。
还说刚才那玩具厂的事儿啊。
我把初步设计方案给厂里的师傅们一看,原本以为他们会夸我设计得好呢,没想到他们提出了一堆意见。
比如说,这推出机构在工作的时候,会产生一些震动和噪音。
机械原理课程设计包装机推包机构运动简图与传动系统设计

机械原理课程设计说明--包装机推包机构运动简图与传动系统设计指导老师:学生姓名:号: 员:六、参考资料• • • •七、组员任务分配 、设计题目和要求、设计方案的选定三、机构的尺寸设计1、曲柄滑块结构的尺寸计算•2、凸轮尺寸设计•四、电动机的选择及传动方案的设计10 五、 、电动机的选择、传动方案的设计、总装配件图•…设计小结10 10 11 12 13 13一、设计题目和要求现需要设计某一包装机的推包机构,要求待包装的工件 1 (见图1-1 )先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工作。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头2按图示的abcde线路运动。
即实现“平推一水平退回一下降一降位退回一上升复位”的运动。
设计数据与要求:要求每5-6S包装一个工件,且给定:L=100mmS=25mmH=30mm行程速比系数K在1.2-1.5范围内选取,推包机由电动机推动。
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效。
至于“ cdea”部分的线路形状不作严格要求。
na 2//////包装工作台运动要求图图1-1二、设计方案的选定1.方案1用偏置滑块机构与凸轮机构的组合机构,偏置滑块机构与往复移动凸轮机构的组合(图2-1 )。
在此方案中,偏置滑块机构可实现行程较大的往复直线运动, 且具有急回特性,同时利用往复移动凸轮来实现推头的小行程低头运动的要求, 这时需要对心曲柄滑块机构将转动变换为移动凸轮的往复直线运动。
图2-1偏置滑块机构与凸轮机构的组合机构图运动过程实现:用偏置滑块机构与凸轮机构的组合机构,偏置滑块机构与往 复移动凸轮机构的组合(图2-1 )。
滑块分拣机原理

滑块分拣机原理
滑块分拣机是一种自动化分拣设备,它可以将物品按照一定的规则进行分类和分拣。
滑块分拣机的原理是利用滑块的运动来实现物品的分拣。
滑块分拣机由滑块、传动机构、控制系统和分拣装置等组成。
滑块是滑动在导轨上的一个长条形零件,它的运动是由传动机构驱动的。
传动机构包括电机、减速器、链条、齿轮等,它们的作用是将电机的旋转转换成滑块的直线运动。
控制系统是滑块分拣机的大脑,它可以根据不同的分拣任务来控制滑块的运动。
分拣装置是用来接收和分拣物品的部件,它可以根据不同的物品特性来设计不同的分拣方式。
滑块分拣机的工作原理是:当物品进入分拣装置时,控制系统会根据物品的特性来判断它应该被分拣到哪个位置。
然后,控制系统会发出指令,传动机构会将滑块移动到相应的位置,将物品推到相应的分拣口。
当物品被推到分拣口时,分拣装置会将它接收并进行分类,然后将分类好的物品送到相应的位置。
滑块分拣机的优点是:高效、精准、可靠。
它可以快速地完成大量的分拣任务,而且分拣的精度非常高,可以达到毫米级别。
此外,滑块分拣机的结构简单,维护成本低,使用寿命长。
滑块分拣机广泛应用于物流、快递、电子、食品等行业,它可以大
大提高生产效率,降低人工成本,提高产品质量。
随着科技的不断发展,滑块分拣机的应用范围将会越来越广泛,它将成为自动化分拣领域的重要设备之一。
搬运机器人结构设计与分析设计说明

搬运机器人结构设计与分析设计说明一、引言搬运机器人是一种用于搬运、运输和搬运物品的自动化机器人系统。
它能够代替人工完成一系列重复性、繁重和危险的工作任务,提高工作效率和安全性。
本文将对搬运机器人的结构设计和分析进行说明,以确保其性能、稳定性和安全性。
二、搬运机器人结构设计1.底盘结构设计:底盘是搬运机器人的基础支架,承载和支撑整个机器人系统。
底盘结构设计应考虑机器人的稳定性和可控性。
一般情况下,底盘采用刚性材料制作,具备足够的承载能力和抗震性能。
另外,底盘应具备一定的机动性,能够适应不同地面和工作环境。
2.导轨系统设计:导轨系统是搬运机器人的运动控制部件,用于引导机器人在指定轨迹上进行移动。
导轨系统的设计应满足机器人的定位和精度要求。
一般采用直线导轨和滚动轮等组合方式,具备高刚度和低摩擦特性,以提高机器人的移动精度和稳定性。
3.动力系统设计:动力系统是搬运机器人的驱动部件,用于提供机器人的动力和能量。
动力系统的设计应考虑机器人的负载和工作条件。
一般情况下,采用电动机或液压驱动方式,具备足够的扭矩和功率输出。
同时,还应考虑机器人的能源消耗和续航能力,以提高工作效率和使用寿命。
4.夹持装置设计:夹持装置是搬运机器人的关键部件,用于夹持和搬运物体。
夹持装置的设计应满足机器人的夹持力和稳定性要求。
一般采用气动或液压夹持方式,具备足够的夹持力和灵活性。
同时,还应考虑夹持装置的自动化程度,以提高机器人的工作效率和安全性。
三、搬运机器人结构分析1.结构强度分析:结构强度分析是对搬运机器人的结构稳定性和安全性进行评估。
通过有限元分析等方法,对机器人的底盘、导轨系统和夹持装置等关键部件进行高强度载荷测试,以确认其承载能力和抗震性能。
同时,还应进行冲击和振动测试,以确保机器人在工作过程中能够稳定运行。
2.运动学分析:运动学分析是对搬运机器人的运动轨迹和姿态进行分析和评估。
通过建立运动学模型,对机器人在不同工作状态下的位姿、速度和加速度等参数进行计算和仿真。
包装机推包机构设计说明书

机械原理课程设计包装机推包机构说明书西南交通大学峨嵋校区机械工程系机电一体化专业 08级2班设计者: 学号:20087663姓名:董智指导老师:温亚莲2010年12月11日机械原理设计说明书包装机推包机的设计摘要包装机是一个产品生产和外包的机器的统称,其主要功能是包装各种产品,而包装机推包机构则是给包装机提供包装产品的机构,其主要功能就是从生产线将产品输送到包装机的相应入口,该机构的运动是一个按一定轨迹的循环往复运动。
随着科技的发展,包装机的更新换代,也迫使推包机构的革新,输送产品的过程不可轻视,推包机构的运用影响到包装机的效率和质量,因而设计者在设计推包机的同时提供了推包机构的设计,另外也有人专门为各种设备设计推包机构。
包装在当今社会相当流行,对于任何产品出厂的最后一步大多是包装,因此包装机的推包机构也是很有市场的。
关键字:包装机推包机构输送Packing up charter aircraft designSummaryPacker is a product of outsourcing production and machinery collectively. Its main function is to a variety of packaging products, packaging machine and push package body is to provide packaging products, packaging machine and its main function is the product from the production line will be transported to The corresponding packagingmachine entrance to the sports bodies are based on a certain trajectory of the campaign cycle.With the development of science and technology, the upgrading of packaging machines, forcing up the body bag innovation, product delivery process should not be underestimated, pushing the body bag to the impact of the use of packaging machine efficiency and quality, and therefore designers pushed the charter at the same time At the same time, provide most of the bodies pushed the package design, it was also a variety of equipment designed specifically for the push package body.Packaging is very popular in today's society, any product manufactured most of the last of a package, the packaging machine is also a body bag up their markets.Keywords: transport Packing up charter aircraft design目录第一章设计题目1总功能要求2设计数据第二章机构设计1机构选择2机构组合第三章方案是拟定和评价1方案的拟定2方案的评价第四章机构运动尺度综合1运动示意图2功能元分解第五章运动设计及参数1减速设备2位置、速度、加速度的分析第六章运动循环图第七章设计总结第八章参考文献第一章设计题目现需设计某一包装机的推包机构,要求待包装的工件1(见图6—26)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
课程设计-包装机推包机构运动简图与传动系统设计.
机械原理课程设计说明书设计题目:包装机推包机构运动简图与传动系统设计学院:机电学院专业:机械工程及其自动化姓名:学号:小组成员:指导老师:目录一、设计题目 (2)二、功能分解 (3)三、运动转换 (3)四、执行机构的选择与比较 (3)五、原动机的选择 (5)六、运动方案的拟定 (6)七、传动机构 (8)八、运动示意图 (10)九、运动循环图 (11)十、执行机构计算 (12)十一、参考资料 (14)十二、小结 (15)一、设计题目现需要设计某一包装机的推包机构,要求待包装的工件1(见图1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工作。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头2按图示的abcdea线路运动。
即实现“平推—水平退回—下降—降位退回—上升复位”的运动。
设计数据与要求:要求每5-6s包装一个工件,且给定:L=100mm,S=25mm,H=30mm。
行程速比系数K在1.2-1.5范围内选取,推包机由电动机推动。
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效。
至于“cdea”部分的线路形状不作严格要求。
图1 推包机构执行构件运动要求设计任务:1.至少提出两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计;2.确定电动机的功率与转速;3.设计传动系统中各机构的运动尺寸,绘制推包机的机构运动简图;4.对输送工件的传动系统提出一种方案并进行设计;5.编写课程设计说明书。
二、功能分解由运动示意图可知此机构可分解为俩个运动,凸轮机构控制运输爪的升降,导杆机构控制往复运动,俩者的配合及凸轮的设计可以达到abcde的轨迹。
如图4.1中1、2为主动件,2、3、4和5的导杆机构,可以完成a、b、c间或c、d 间的往复运动,1的凸轮与4机构的平底接触,可以使整个4机构上下往复运动,从而有abc与cd间的高度差,通过设计凸轮的参数,配合导杆机构完成整个abcde的运动轨迹。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理课程设计
设计说明书
设计题目:块状物品推送机的机构综合与机构设计
班级:11机械本2
姓名:
学号:
指导教师:
完成时间:2013年07月03日
一 .设计题目:
块状物品推送机的机构综合与机构设计
在自动包裹机的包装作业过程中,经常需要将物品从前一工序转送到下一工序。
现要求设计一用于糖果、香皂等包裹机中的物品推送机,将块状物品从一位置向上推送到所需的另一位置。
1.1设计数据和要求:
1.推送的距离H=120mm,生产率为每分钟推送物品120件。
2.推送机的原动件为同步转速为3000r/min的三相交流电动机,通过减速装置带动执行机构主动件等速转动。
3.由物品处于最高位置是开始,当执行机构主动件转过150°时,推杆从最低位置运动到最高位置,当主动件再转过120°时,推杆从最高位置又回到最低位置,最后当主动件再转过90°时,推杆在最低位置保持静止。
4.设推杆在上升过程中所受到的物品中立和摩擦力为常数,其大小为500N,推杆在下降过程中所受到的摩擦力为常数,大小为100N。
5.使用寿命为10年,每年工作300个工作日,每个工作日工作16小时。
6.在满足行程的条件下,要求推送机的效率较高(推诚的最大压力角应小于35°),结构紧凑,震动噪音小。
二 .实现推送机推送要求的执行机构方案选定
2.1实现推送机推送要求的执行机构设计方案
方案一
凸轮-连杆组合机构如上图所示的凸轮-连杆组合机构也可以实现行程放大功能,在水平面得推送任务中,优势较明显,但在垂直面中就会与机架产生摩擦,加上凸轮与摆杆和摆杆与齿条的摩擦,积累起来,摩擦会很大,然后就是其结构较为复杂,非标准件较多,加工难度比较大,从而生产成本也比较大,连杆机构上端加工难度大,而且选材时,难以找到合适的材料,使其既能满足强度刚度条件又廉价,因此不宜选择该机构来实现我们的设计目的。
方案二
如上图所示的凸轮机构,凸轮以等角速度回转,它的轮廓驱使从动件,可使推杆实现任意的运动规律,但是使用凸轮机构磨损较为严重,滚子不能很好的紧贴凸轮,容易振动,运行时稳定性能差,由于摩擦较大,动力使用效率不高,造成能源浪费,不能到达环保节能的目的,不能满足设计要求。
方案三
如上图所示,方案存在有一定缺点,首先存在磨损问题,运动链较长,进而需要更多能量来驱动,其次是加工难度较大,但是结构简单紧凑,噪音小,运用蜗轮蜗杆传递动力,采用了带传动,凸轮机构回转运动,易于完成小范围内的物料推送任务,效率较高并且运动精确稳定效应迅速,动力使用率较高,满足环保节能的目的,可使推杆有确定的运动,完全符合设计目标。
三.机械运动方案选型及最终方案构件尺寸
3.1最终确定方案的构件尺寸
四.所选方案的机构运动学分析
4.1推杆位移公式
2
212/s h δδ
= 1(0,/2]δδ∈
22112()/s h h δδδ=-- 11(/2,]δδδ∈
21
[1
cos(
)]/2
s h πδδδ=+-
12(,]
δδδ∈
其中
1δ=150°,2δ=270°
分析:
由曲线可知,在一个周期内推杆位移先增加(0°-150°)后减小(150°-270°)后不变(270°-360°),符合推杆先上升后下降再停顿。
4.2推杆速度公式
2
14/v h δδ=
1(0,/2)δδ∈
2
114()/v h δδδ
=--
11(/2,)δδδ∈
21
21
sin(
)
v ππδδδδδ=-
--
12(,)
δδδ∈
其中1δ=150°,2δ=270°
分析:
凸轮的推程(0°-150°)选择的是等加速等减速运动规律,由上图可知在150°之前,无速度突变即无刚性冲击,推杆速度先均匀增大后均匀较小至零。
回程时(150°-270°)选择的是五次多项式运动规律,先增加后减小至零,曲线完全符合,无速度突变亦即无刚性冲击。
近休时(270°-360°),速度为零,无刚性冲击。
4.3推杆加速度公式
2
14/a h δ
= 1(0,/2)δδ∈
2
14/a h δ
= 11(/2,)δδδ∈
2
21
21
(
)cos(
)
a ππδδδδδ=---
12(,)
δδδ∈
其中1δ=150°,2δ=270°
分析:
凸轮的推程(0°-150°)选择的是等加速等减速运动规律,在开始时(0°)、
(75°-80°)、(150°)加速度有突变,但是突变有限,因而引起的冲击较小,故只存在柔性冲击。
回程时(150°-270°)选择的是五次多项式运动规律,由曲线可知加速度无突变,即无柔性冲击。
综合分析:
有速度、加速度曲线可知,推杆的推程只存在柔性冲击,推杆回程既无刚性冲击也无柔性冲击。
凸轮廓线
4.4所选方案的运动角度变化:
凸轮转角0~150°150~270°270~360°推杆上升下降停止
凸轮从最低点运动到最高点作推程运动时,推杆推送物品作上升运动,同时压缩弹簧。
凸轮从最高点作回程运动时,推杆在自身重力和弹簧弹力的作用下作下降运动。
电动机不断地提供电能带动整个装置的传动,完成构件上下往复运动,把一个物品从一个位置推送到另一个位置。
五总结与建议
通过本次大作业我学会了很多。
首先是在设计方面,我学会了综合考虑,对比选择最优机构,学会了发现问题并及时解决问题,当然我也学会了多种查阅资料的方法,比如图书馆的相关文献、googel文献引索、中知网。
当然也发现了自身的很多不足,所以决定在假期里来填补自己的不足,以便今后完成更多,更复杂的设计,为自己的专业服务。
像这种能够锻炼自己的机会并不多,我建议在日后的学习中可以多一些这样的机会,让我们更牢固的掌握我们所学到的专业知识。