喷雾机悬架的优化设计_张际先
抽油机支架的优化设计

车” 的情况更 为严 重 , 符合 经济 高效 的原 则_ ]电机 换 向抽油 机 正是 以其 机 电技术 的有 机集 合 , 不 _ . 】 较好 地解
架 进行 以下 简 化 : 1 将 各型钢 之 间 的焊接 均视 为理 想焊 接 , 各结点 为钢 结 点 ; 2 以直杆 代 替微 弯或 微 折 () 即 ()
的杆件 , 以实 体杆 件 代替各 截 面形 状 的杆件 ;3 模 型 中以直线 代 表各 实体 杆件 , 键点 设 在截 面 中 间 , () 关 并且
收 稿 日期 : 0 7 0 — 6 2 0 —42
基金 项 目: 苏省教 育厅 自然科 学基 金 资 助 项 目(4 B 6 1 8 ; 州 市 ~ 扬 州 大 学科 技 合 作 基 金 项 目( Z 0 4 4 - 9 江 OKJ 4 O 6 ) 扬 Y 2002 )
作 者 简介 : 曾励 ( 9 7) 男 , 1 5一 , 四川 威 远 人 , 授 , 要从 事 机 电 一体 化 技 术 、 悬 浮 技 术 、 电 系统控 制 技 术 研 究 . 教 主 磁 机
选用 空 间梁单元 ( em4 和空 间杆 单元 ( ik ) 离散 支架 . Ba ) Ln 8来
根据 抽油 机使用 时 的实 际情 况 , 模 型加位 移 约束 : 给 4条大 腿 下部 由螺 栓 固定 在 基 础上 , 固接边 界 , 为 即 6个方 向 自由度 全 约束 . 荷考 虑平 台、 架 自重 、 动系 统 的重 力 和外 载 , 载 支 传 外载 为悬 点 载荷 、 衡重 重 量 以 平 及风 载. 当悬 点 载荷及 平衡重 重 量均为 1 0 N, 压为 8 0 a时 , 以下原则 给模 型加 载 : 电机 、 2k 风 0P 按 将 减速 器 、 摩 擦轮 等 的 自重 平均 加到 各 自的支 承板 所在 的 4个 节点 上 ; 平 台 自重及 支架 自重平 均加 到各 自包含 的节 点 将
高地隙喷雾机主动空气悬架减振控制与实验

高地隙喷雾机主动空气悬架减振控制与实验武秀恒;秦嘉浩;杜岳峰;宋正河;陈雨;谢斌【期刊名称】《农业机械学报》【年(卷),期】2018(49)6【摘要】高地隙自走式喷雾机在接近于系统固有频率的地面条件下工作时,由于车身重心高、喷杆质量大且展开后较长,导致工作时车身与喷杆大幅剧烈摆动,影响作业质量甚至危及安全.针对此,本文提出适时开启的主动空气悬架减振方案.方案实施过程中,一方面需要解决空气弹簧充放气过程中的非线性控制问题,另一方面则需面对车身加速度与位移多变量同时控制以及最大控制力和悬架行程受限的传统问题.为此,制定了一种空气悬架H∞状态反馈与时频非线性联合减振控制策略.首先求解系统在约束条件下的H∞状态反馈控制器增益,基于此控制器可计算系统在地面扰动下的空气弹簧所应实施的目标压力;然后设计时频非线性控制器,依靠该控制器实时调节比例电磁阀开度进而控制空气弹簧压力使其跟随目标.基于室内台架实验,在模拟地面条件接近于系统固有频率以及田间随机路面激励两种工况下,对所提策略进行了验证.结果表明,系统在一阶共振频率的激励下,被动悬架簧载质量最大加速度达8.5 m/s2左右,半主动悬架的最大加速度约为7 m/s2,而主动空气悬架的最大加速度降低至2.5 m/s2,并在主动控制过程中,悬架位移始终保持在限制范围内,激振结束后悬架位移逐渐恢复至零初始位置;在随机田间路面激励工况下,主动控制悬架的车身加速度亦显著降低,证明了主动减振方案的有效性.【总页数】8页(P60-67)【作者】武秀恒;秦嘉浩;杜岳峰;宋正河;陈雨;谢斌【作者单位】中国农业大学工学院,北京100083;现代农业装备优化设计北京市重点实验室,北京100083;中国农业大学工学院,北京100083;现代农业装备优化设计北京市重点实验室,北京100083;中国农业大学工学院,北京100083;现代农业装备优化设计北京市重点实验室,北京100083;中国农业大学工学院,北京100083;现代农业装备优化设计北京市重点实验室,北京100083;西北农林科技大学机械与电子工程学院,陕西杨凌712100;中国农业大学工学院,北京100083;现代农业装备优化设计北京市重点实验室,北京100083【正文语种】中文【中图分类】U463.33+4.2;S49【相关文献】1.大型高地隙喷雾机喷杆主动悬架自适应模糊滑模控制 [J], 薛涛;李伟;杜岳峰;毛恩荣;温浩军2.高地隙喷雾机自动导航驾驶管理系统 [J], 张健;郑成玉;杨然兵;员玉良3.基于机器视觉的高地隙喷雾机自动导航系统设计 [J], 谭文豪;桑永英;胡敏英;申锴;张文卿;宋洋洋4.高地隙自走式喷杆喷雾机研究现状及展望 [J], 张国彬;孙立伟;鲍清校;王守峰;刘江涛;胡敏英;王锦轩5.高效智能超高地隙自走式喷杆喷雾机设计与研究 [J], 张国彬;孙德郁;杨胜南;卢静昌;刘江涛;胡敏英因版权原因,仅展示原文概要,查看原文内容请购买。
喷浆机器人大臂结构的多目标优化设计

slt n n be e n te r m v o gte et a l eap oi ae hc e ed m n i oui a lsh do h m o e n rc n rxm tl w i met t e a dn o oe t e f a l a hv i i p l y h sh gf Ke r s Mut o jcie Opi l ein R b t ywo d : l- bet ; t s ; o o i v ma d g 中 图分 类号 : P 4 文献 标识 码 : T. 2 A
( : 即 令 F 广/ C I O ( 1 ,, ) _B E> , = , 3…, 。 _ 2 H2 ) , 0 以上这 些要求 的实现 , 极大地简化 了控制过 程和伺服控 制
Y, f_ ) ,Ⅲ
10 1
0 0
1 0
0 1
的关节数 ,只需适 时控制一个关节的运动就可实现要求 的运动 轨迹 , 从而使 喷枪 口始终保 持与受喷面垂直 、 等距 的关 系 , 满足 喷浆工艺要求 。
10 0 l l O0 sn 3 0 0 l S3 i 0 l  ̄ 0 1 十 2 Js 0 C S 3 0 0 0H1 -i 3 O 0 日 J n 0 1 0 0
() B E ( 4 / C 见图 1 _ )应 随大臂前 端的 升起呈单 调增趋 势
l 结构方 案的确定
为 了解决喷浆机械手存在 的问题 , 在对多种 方案进行反 复 筛选 之后 , 确定了机器人手臂的结构方案 。 机器人 手臂部分 由机械手 、 液压系统 、 控制系统 、 操作 器等
组成, 具有 6 个自由度, 即大臂俯仰, 小臂摆动, 水平伸缩臂纵向
进给 , 手腕转动 , 喷枪摆动和喷枪转动 。 为 了满足喷浆工 艺与控制 上的需要 。 对本机 器人 大臂 的结
高地隙自走式喷雾机转向传动系统的优化设计

理想状况下四轮转向系统的内外转角关系:
cotαi
-cotβi
=
2K L
要实现实现车轮的纯滚动,使内外轮转角尽可能地满足
阿克曼转向原理,需要对四轮转向系统中的转向传动机构进
行优化计算,当然在实际转向过程中,难免会因为一些不确定
因素造成一定的误差,将外轮转向角理论值与实际转向角之
间的偏差作为目标函数,因此,因此得到目标函数为:
名称
长度(mm)
轮距(K)
1460
轴距(L)
2375.5
主销之间间距(M)
1048.288
活塞安装距离(h)
74.5
活塞运动距离(e)
160
梯形臂长(L1)
120
连杆长(L2)
168.109
梯形底角(θ)
75°
表 3 运动副添加位置设置
基础部件
约束类型
车桥与地面
固定副
梯形臂与车桥
固定副
主销与梯形臂
固定副
107 2018 年第 1 期
机电设计与研究
称,可以将四轮转向等效为分析前轮转向,以 XY 平面为主界 面设定关键点,将前车桥中心点坐标定义为坐标原点 (0,0,0),这样便于在建模过程中设置相应关键点的坐标,并 对关键点之间添加相应的构件,得到如图 3 所示的模型。
湿喷机五边箱型伸缩臂优化设计

21 伸缩 臂的计算 工况 .. 2 箱 形 伸缩 臂 的计算 工况 应 由起 重 机 的起重 特 性 曲
线 选 取。 该特 性 曲线是 由臂 架 强 度 曲线 和起 重 稳定 曲
基本臂 图1 伸缩臂 简图
二 节臂
线 的包 络线 来描述 。 吊臂在小 幅度 时决定 于强度 曲线, 在 大幅度 时决 定于 稳定 曲线。 因此 通常选 择 起 重特 性
■中铁一局集 团有 限公司 倪平利/ igi NI n l P
成都市新筑 路桥机 械股份有 限公 司 周和 勇/ H e o g z 0u H y n
摘 要: 五边 箱型伸 缩臂 架结构设计首先确定重要影响因数作为变量 进行设计, 重要影响 因数包括 设计 载荷 、 材料
强度、 稳定条件、 强度条件、 使用工况及寿命等 , 求得伸缩臂最优截面尺寸, 作为减少其质量 的优化路径。 关键词 : 湿喷机 五 边箱型 伸缩臂架 目标函数 影响因数
优 解处在多个 约束的交集 上时,这 种情况更 易出现 。
者 部 分 全 埋 的情况下启 动,瞬 时 负载很 大 ,液 压 系 统 冲击很大 ,不仅消耗 的发动机 的功率 ,而且 会使得发动
机 转 速 下降 ,影响其 他 系统 工作。 因此对 螺旋 分 料器
的液压 冲击 问题 的研究是 很有必要 的。
到最佳 ; 合考虑机 械臂设 计 的各种 影响因数 , 综 针对某 约束区域 的边界上 ,而 圆整后 的解 很可能落在约束 区域 新型 湿喷机 的五边 箱型伸 缩臂架 结 构进 行 的优化分 析, 外面,而成 为 不可行 解 或 者不是 真正 的 最优 解 。 当最
为开发、生产湿喷机 的人 员提 供参 阅。
火箭发动机喷雾过程的数值模拟及其优化设计

火箭发动机喷雾过程的数值模拟及其优化设计作为现代科技和航空航天技术的重要组成部分,火箭发动机的性能和稳定性对于其实际应用以及成本和人员安全方面的考虑都非常重要。
其中火箭发动机的喷雾过程是一个非常重要的组成部分,对于火箭发动机的推力、燃料使用效率、喷射噪音等方面都有很大的影响。
因此,喷雾过程的数值模拟及其优化设计也是火箭发动机研究领域中的一个重要研究方向。
火箭发动机喷雾过程的数值模拟基于数值计算方法,通过对喷雾流场的计算和分析,可以得到喷雾过程中的流体动力学特性、液体和气体相互作用及燃料和氧化剂混合状态等相关信息。
这些信息对于评估火箭发动机的性能和稳定性非常重要,同时也对于火箭发动机的优化设计提供了科学依据。
目前,火箭发动机喷雾过程的数值模拟可以采用多种数值计算方法,如欧拉法、拉格朗日法、Vof法等。
其中,欧拉法是最常用的一种方法,它基于连续介质假设,将流场分为若干计算单元,并通过求解控制方程和边界条件,计算单元内各物理量的变化。
相比于拉格朗日法,欧拉法具有计算速度快、计算耗时短、易于实现等优点。
火箭发动机喷雾过程的数值模拟的基本步骤包括:建立数学模型、离散化和求解控制方程、计算流体的物理量、计算物理量的变化等。
其中,建立数学模型是整个数值模拟过程中最核心的部分,它需要根据实际的喷雾过程以及流动条件,选择和构建合适的数学模型。
与火箭发动机喷雾过程的数值模拟相比,喷雾过程的优化设计则更加依赖于实验研究和经验。
喷雾过程的优化设计主要包括燃料和氧化剂的比例和压力、喷嘴形状和大小、内部结构等方面。
在进行喷雾过程的优化设计时,需要综合考虑推力、燃料使用效率、喷射稳定性、噪音等方面的要求,在保证火箭发动机稳定工作的前提下,尽可能提高火箭发动机的性能。
总的来说,火箭发动机喷雾过程的数值模拟及其优化设计是现代航空航天技术中的重要研究方向之一,通过数值模拟和优化设计,可以提高火箭发动机的性能和稳定性,并为航空航天技术的发展和应用做出贡献。
基于ADAMS的全地面起重机油气悬架动力学优化设计
()悬架 缸压 缩过 程 :油液从 蓄能 器 4分 两路 1 进 入 油缸 ,一 路 为节 流 孔 ,另 一 路 为 单 向 阀 。将 单 向阀的开 启压力 设置 为 0 ,则油 缸 压缩 时从 蓄能 器 4进 入油 缸 的油液基 本就 只经过 单 向阀 。
计 变量 的对象 ,而 不 用考 虑 内部 之 间 的关 联 变 动 , 达 到对模 型优化 的 目的 。
1 单桥 油气 悬 架建 模
1 1 机械 系统建模 .
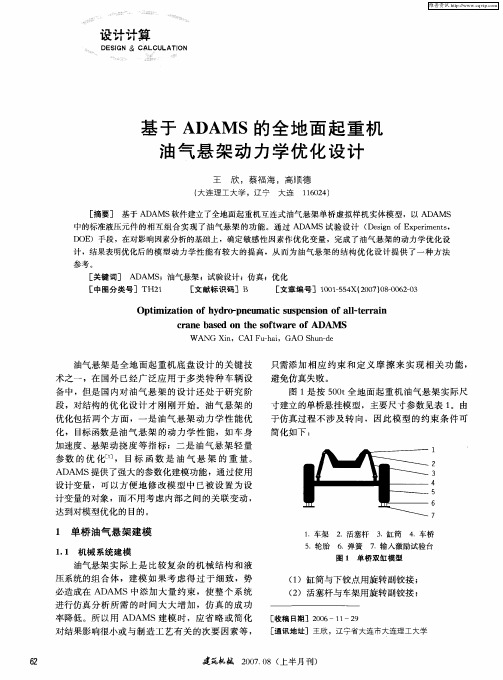
1 车架 .
5 .轮胎
2 活塞杆 .
6 簧 .弹
3 .缸筒
4 车桥 .Leabharlann 7 入 激 励试 验 台 .输
油 气悬架 实 际 上 是 比较 复 杂 的 机 械 结 构 和 液 压 系统 的组 合 体 ,建 模 如 果 考 虑 得 过 于 细致 ,势
设 计变 量 ,可 以 方 便 地 修 改 模 型 中 已 被 设 置 为 设
避免仿真失败 。
图 1 按 50 全 地 面起 重 机油 气 悬 架 实 际尺 是 0t
寸建立的单桥悬挂模型 ,主要尺寸参数见表 1 。由 于仿真过程不涉 及转 向,因此 模型的约束 条件可 简化 如下 :
必 造成 在 ADA MS中添 加 大 量 约 束 ,使 整 个 系 统
图 1 单 桥 双 缸 模 型
()缸筒 与下铰 点用 旋转 副铰接 ; 1 ()活塞杆 与车 架用 旋转 副铰接 ; 2
[ 收稿 日期]2 0 —1 —2 06 1 9 [ 通讯地址]王欣 ,辽宁省大连市大连理工大学
维普资讯
设计计算
ON DE I S GN & cJ CULATI AL
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
年月农业机械学报第卷第期喷雾机悬架的优化设计张际先
摘要以lrr型机动喷雾机为例应用DADS动态分析及设计程序建立喷雾机悬架的动态模型并根据正交设计方法选取悬架参数的试验组合计算机身的稳定过程及机器以一定速度越过路面突起时机身不同位置加速度的变化以及喷臂高度的变化来选取悬架参数
的优化组合这种方法也可以用于机动型农业机械悬架参数的优化设计叙词喷雾机悬架优化设计
机动型农业机械的悬架对机器性能有很大影响农业机械在田间作业时行走速度一般低于20kmh/在道路上行走时又要求有较高的速度对于喷雾机械在工作过程中由于药箱中药量的变化机器重量也在变化要求悬架有较宽的适应性悬架的性能不但影响驾驶人员对机器的操纵及舒适性更重要的是减轻由于地面不平所引起的机身及喷臂的振动以保证喷雾质量及延长喷臂寿命车辆悬架的设计主要靠经验设计及试验改进近年来越来越多的研究者建立了计算机模型来模拟车辆悬架的工作性能以改进悬架的设计仁,一’〕在此以Tyle:PatriotMT型机动喷雾机为例应用动态分析及设计软件DADS对喷雾机悬架进行优
化
设计提出机动型农业机械悬架参数的优化设计方法
1DADs及Ty一erPatroitT
M
型喷雾机动态模型
11DADS的
理论基础
DADs是美国计算机辅助设计软件公司编制的动态分析和设计系统软件它将整个机械
系统分成不同的元素包括机体元素限制元素力元素等建立牛顿运动微分方程求解计
算系统内各部分的位移速度加速度以及所受的力和力矩DADS的主要理论基
础
如下
:
设系统的加速度方程为仁`
〕
,1
酬IJ
JA了F一A厂|阮l一,11|J一陌卜腼|
以
ó
严
…。夕
…电叭。oJ叭
式中M为组合质量矩阵J为惯性矩矩阵中为位移限制矩阵中为转动限制矩阵于为
厂O一10]
加速度矢量。一「0o中]T为角速度矩阵山一1100}中为角速度转换矩阵F”为所OL00」
此文有关的研究工作是在美国明尼苏达大学农工系JChavil教授及博士研究生蒋登峰协助下完成的在此表示感谢张际先江苏理工大学农机学院副教授212013江苏省镇江市第1期喷雾机悬架的优化设计施加的力犷为所施加的力矩y一中矛+中山几为拉格朗日乘数矢量DADS根据输入的动态分析模型首先检查装配误差及系统的自由度和冗余然后根据各
元素的初始值及模拟终止时间逐步求解所建立的微分方程
12TylerpatroitTM喷雾机理论模型
图1为喷雾机简图由于主要分析悬架性能将喷臂与机身视为一体机身通过前后支撑臂由四组弹簧和减振器支撑在轮轴上支撑臂弹簧与减振器
组成了悬架系统当机器前进时悬架系统与车轮吸收路面振动使机身保持平稳
机器的动态模型由五种元素组成
:
①机体元素表示机器中相关的各部件由机
丁币}
咒
KD门叮
车企
KDZ
后轮一
黯承
图1Patorit喷雾机悬架及路面突起身前左右支撑后左右支撑前左右轮后左右轮及地面10个元素组成其中地面为不动体车轮沿地面转动
②连接元素表示各机体元素间的连接关系由机身和支撑支撑和轮轴8个铰链元素
组成③力元素表示各机体元素间的受力关系假设各铰链元素中的阻尼及弹性系数为零
则力元素为4个车轮的刚度与阻尼以及悬架所包括的4组弹簧与减振器的刚度与阻尼若轮
胎充气不同刚度与阻尼将发生变化在此设轮胎对地面的滚动阻力系数为002摩擦系数为
02阻尼系数为3kNs/m垂直刚度系数为275kN/m侧向刚度系数为250k
N
/m
川前悬
架的刚度与阻尼系数为Kl和Dl后悬架为K:和D:这4个参数主要影响悬架系统的性能
④驱动元素表示机器的运动情况为了模拟机器前进时悬架的习性设机身以Zms/的
速度运动其它各部分将根据连接关系随机身运动在计算机身稳定过程中设机身在前进
方向上的速度为
零
⑤路面元素
表示机器运动时的路面状况为了比较机器前进时机身沿高度方向加速
度的变化设路面上有一突起其外形如图1所示当车轮越过突起时机身将升起然后落下因此车身将在前后轮越过突起时受到两次冲击000O092悬架参数的优化设计方法
21稳定过程的比
较
由于悬架的存在当机器受外界干扰时系统的总能量
将发生变化只有系统的总能量处于最低状态机器才是稳
定的悬架的作用应使机器在受外界干扰时尽快恢复稳定状态假设机器静止不动给定机身高度的初始值如果这个初始值不是使系统能量最低的稳定值机身将在重力和
悬架作用下振动最终达到稳定值机器总势能的变化如图2所示应用DADS程序模拟在相同初始条件下采
用不同
悬架参数时系统的稳定过程用达到稳定条件所需要的
时
间来评价悬架的性能
稳定时间23
模拟时问/
机器在稳定过程中
总势能的变化
片“比日队|ì冲
明l|耐
c图
工\公搜农业机械学报1
995
年
改1加速度
点2加速度
一
、点“月
04
一
三\侧驾口只
0一一-I
.22运动过程的比较
假设机器以Zm/s的速度向前运动当越过所设
路
面突起时机身各点加速度将发生变化在高度方向上的加速度曲线如图3所示加速度曲线可分为3部分:第一部分从机器开始运动到前轮遇到突起这时由于路
面高度不变加速度变化说明了机器自身的稳定过程;
第二部分为前轮越过突起机身各点加速度的变化;第三部分为后轮越过突起时加速度的变化
当车轮遇到路面突起时垂直方向加速度出现正的峰值称为最大加速度车轮越过突起垂直方向加速
度出现负的峰值称为最小加速度以两个峰值间的
加
速度变化作为评价悬架性能的一个指标当机器以同一速度越过相同路面突起时认为加速度变化较小的悬架性能较好根据正交设计方法困选取K,K:D,DZ四
因素的不同组合用DADS求出机身在两点上的加速度变化点1选在驾驶座位处其加速度变化反映了驾驶
员的操纵舒适性点2选在机身与喷臂连接处机身的加速度变化将由此点通过喷臂悬挂机构传递给喷臂此点加速度的变化影响喷臂受力状态及喷臂的工作性能采用不同的悬架参数当车辆越过突起时喷臂连接点高度的变化也不同如图4所示为了保证良好的喷雾质量应使喷雾机工作时喷臂高度变化尽可能小
23模拟时间
/
图3驾驶座位及喷臂中心处的
加速度
曲线
高度变化量
已\侧
健
模拟时
问/
图4喷臂中心高度的变化
3模拟结果与路面试验的比
较
50-5
任\ǎ牵擎à剑用具Z彭十一
模拟时间22模拟时间s/
三\ǎ汀ù擎ù到侧ǔ一只阶若
4三\ǎ
ō彩详à娜圳吕
n010-一
图5为计算机模拟结果与
喷雾机路面实测加速度值的
比较机器前进速度为36ms/实测时设置路面突起与模拟路面值相同悬架参数的实测值为K,=K
:
一180kN/m
D,一D:一15kNs/m机器
重量实测值和模拟值都以储药桶药量为一半时计算图中点3为前轮轮毅处点2为喷臂中心处实测时由于难以保证左右两轮同时越过路面
突起以及轮胎越过突起时的
变形实测加速度曲线出现双
2模拟“寸介
1,
吴一4
50巧-UI
三\ǎ夏祛à目俐=之巴
2模拟时间/
图5模拟值与实测值的比较