交点法计算坐标
交点法线路平曲线坐标计算 [新方法]
![交点法线路平曲线坐标计算 [新方法]](https://img.taocdn.com/s3/m/4eaa9513964bcf84b9d57bf7.png)
线路线路工程工程工程[[交点法交点法]]平曲线坐标计算[新方法]作者作者::刘宗远 联系方式QQ :63453673 2013年10月[简述]:在网上看了很多网友的线路交点法计算程序,平曲线小坐标大多采用的是切线支距法切线支距法切线支距法。
经本人结合线路工程的施工特点和相关资料,总结归纳出一套全新的全新的全新的线路坐标编程线路坐标编程线路坐标编程解算方法解算方法解算方法(弦线偏弦线偏角支距法角支距法——————也叫极坐标法也叫极坐标法也叫极坐标法)。
计算精度满足线路主线要求。
第一部分第一部分::基本公式基本公式一、圆曲线圆曲线::1、偏角:2、弦长:式中: —偏角—弧长所对应的圆心角—待求点到zy 点的距离 二、缓和曲线缓和曲线:: 1、切线角:(1)缓和曲线上任意一点切线角:(2)曲线上任一点偏角:(3)弦切角:(hy(yh)点处弦线与切线的交角)2、弦长:22590Lsr l l c i ××−= 式中:zh ki l −= 缓和曲线一点到zh 点的距离 —前(或后)缓和曲线总长第二部分第二部分::程序分步公式程序分步公式一、交点参数计算:(非对称缓和曲线型)1、内移值P :前缓和曲线内移值:341212688241R L R L P S s −= 后缓和曲线内移值:342222688242RL R L P S S −= 2、切线增长值q :前缓和曲线切增值:231124021R L L q s s −=后缓和曲线切增值:232224022RL L q s s −= 3、切线角β:前缓和曲线切线角: R L S 1901=β 后缓和曲线切线角: RL s 2902=β 4、切线长T :前切线长:ααsin 2112tan)1(1p p q P R T −−++=后切线长:ααsin 2122tan )2(2p p q P R T −+++=5、曲线总长:)(5.018021S S L L RL +×+=πα二、主点计算主点计算::1、桩号计算桩号计算::ZH=交点桩号-T1 HZ=ZH+L HY=ZH+L S1 YH=HZ-L S22、坐标计算坐标计算::1)ZH 点坐标点坐标:: 方位角:F 前=前直线方位角前直线方位角(或前切线方位角) X zh =X J D -T 1×cosF 前 Y zh =Y J D -T 1×sinF 前2)HZ 点坐标点坐标::方位角:F 后=F 前+ξα(交点转角) 注:ξ—交点转角偏向符,左偏-1 右偏+1 X hz =X J D +T 2×cosF 后 Y hz =Y J D +T 2×sinF 后3)HY 点坐标点坐标::前缓曲线终点偏角:前缓曲线终点弦长:212511901S S S L r L L C ××−=方位角:F=F 前+ξδ0 (缓曲线终点偏角) X hy =X zh +C 1×cosF Y hy =Y zh +C 1×sinF 4)HY 点坐标点坐标::后缓曲线终点偏角:后缓曲线终点弦长:222522902S S S L r L L C ××−=方位角:F=F 后+180-ξδ0 (缓曲线终点偏角) X yh =X hz +C 2×cosF Y yh =Y hz +C 2×sinF三、各线元段坐标计算 1、前直线段 Ki<ZH待求点到ZH 点的距离:Li=Ki-ZH方位角:F 前=前直线方位角(或前切线方位角) X=X ZH +Li ×cosF 前 Y=Y ZH +Li ×sinF 前2、前缓曲线段前缓曲线段 ZH ZH ≤Ki ≤HY HY待求点到ZH 点的距离:Li=Ki-ZH前缓曲线任意点偏角:1230S L R Li ××=πδ前缓曲线任意点弦长:212590S ii L r L L Ci ××−=中桩弦线弦线弦线方位角:F 中=F 前+ξδ 注:ξ—交点转角偏向符,左偏-1 右偏+1 中桩切线切线切线方位角:F 切=F 中+2 δ—缓曲线偏角 X=X zh +C i ×cosF 中+B×cos(F 切+θ) 注:θ—中线与中桩至边桩连线的夹角 Y=Y zh +C i ×sinF 中+B×sin(F 切+θ) B—中桩至边桩的距离3、圆曲线段HY HY<Ki<<Ki<<Ki<YH YH YH待求点到HY 点的距离:Li=Ki-HY 圆曲线任意点弦长:2243rL L Ci i i ×−= 前缓曲终点切线角:RL S 1901=β 圆曲线偏角RLi×=πδ90 中桩弦线弦线弦线方位角:F 中=F 前+ξ(+)中桩切线切线切线方位角:F 切= F 前+ξ(+2) 注:圆曲线偏角为圆心角的一半X=X HY +C i ×cosF 中+B×cos(F 切+θ) 注:θ—中线与中桩至边桩连线的夹角 Y=Y HY +C i ×sinF 中+B×sin(F 切+θ) B—中桩至边桩的距离 4、后缓曲线段后缓曲线段 YH YH ≤Ki ≤HZ待求点到HZ 点的距离:Li= ZH -Ki 后缓曲线任意点偏角:2230S L R Li ××=πδ后缓曲线任意点弦长:222590S ii L r L L Ci ××−=中桩弦线弦线弦线方位角:F 中=F 后+180-ξδ 注: ξ—交点转角偏向符,左偏-1 右偏+1 中桩切线切线切线方位角:F 切=F 中-2 δ—缓曲线偏角 X=X HZ +C i ×cosF 中-B×cos(F 切+θ) 注:θ—中线与中桩至边桩连线的夹角 Y=Y HZ +C i ×sinF 中-B×sin(F 切+θ) B—中桩至边桩的距离 5、后直线段后直线段 Ki>HZ Ki>HZ Ki>HZ待求点到HZ 点的距离:Li=H Z-Ki 方位角:F 后= F 前+ξα(交点转角) 注:ξ—交点转角偏向符,左偏-1 右偏+1 X=X HZ +Li ×cosF 后 Y=Y HZ +Li ×sinF 后工程实例工程实例表一表一 直曲表直曲表逐桩坐标表桩坐标表第三部分第三部分 [TI [TI 计算器计算器]]线路综合线路综合程序代码程序代码程序代码((坐标计算部分坐标计算部分))程序显示界面:一、主程序代码程序子程序二、坐标正算坐标正算子交点数据库子程序三、交点数据库子程序数据库子程序四、桩号桩位显示字符转换子程序 线元段、、桩位显示字符转换子程序桩号、、线元段。
交点法、线元法坐标计算
3、交点法、线元法坐标计算坐标计算是根据图纸中“直线及曲线转角一览表”提供的数据计算道路中桩坐标,然后和图纸提供的“逐桩坐标表”比对,如果一样则说明输入平曲线参数输入正确,可以计算边桩坐标和其他结构物坐标了;如果中桩坐标不一样,一般是平曲线参数输入有误,需要重新检查输入,另一种结果是图纸有错,这种情况少见,但不代表没有。
“直线及曲线转角一览表”和“逐桩坐标表”见附件1、附件2。
线元法是以路线的起点坐标、方位角、起终点桩号等节点元素来计算出要求的坐标;交点法是以路线的交点要素和路线的主要要素来求得坐标。
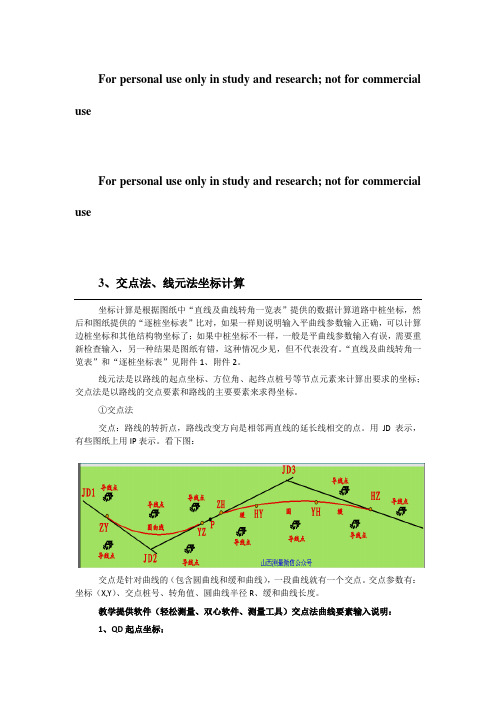
①交点法交点:路线的转折点,路线改变方向是相邻两直线的延长线相交的点。
用JD表示,有些图纸上用IP 表示。
看下图:交点是针对曲线的(包含圆曲线和缓和曲线),一段曲线就有一个交点。
交点参数有:坐标(X,Y)、交点桩号、转角值、圆曲线半径R、缓和曲线长度。
教学提供软件(轻松测量、双心软件、测量工具)交点法曲线要素输入说明:1、QD起点坐标:起点坐标必须在直线段上,或填写前一交点的坐标。
2、JD交点曲线要素:(1)交点桩号(2)交点坐标(X,Y)(3)曲线半径R(4)第一缓和曲线长度LS1,若为0,输入0,不能为空。
(5)第二缓和曲线长度LS2,若为0,输入0,不能为空。
3、ZD终点坐标:终点坐标也必须在直线段上,或填写后一交点的坐标。
检核数据是否输入正确的方法:软件生成的圆曲线要素中切线长、外距、交点里程:注意校正起点里程、等与设计图纸是否一致。
如果上述数据和图纸不一样,请认真检查有错误的交点处的数据输入是否正确,如果输入没有错误,请考虑是否包含不完整缓和曲线,使用公式A2=R*Ls检查是否包含不完整缓和曲线。
如果包含不完整缓和曲线,那就需要用线元法也叫积木法计算了。
有的设计院给出的直曲表是整条设计线路的直曲表的一部分,以其中某个交点作为起始点的话,起始里程有时候需要校正,当然,并不是每个图纸给出的起点里程都需要校正,大多数图纸的起点里程已经被设计院校正过,我们输入平曲线的时候需要验证一下。
交点法坐标计算
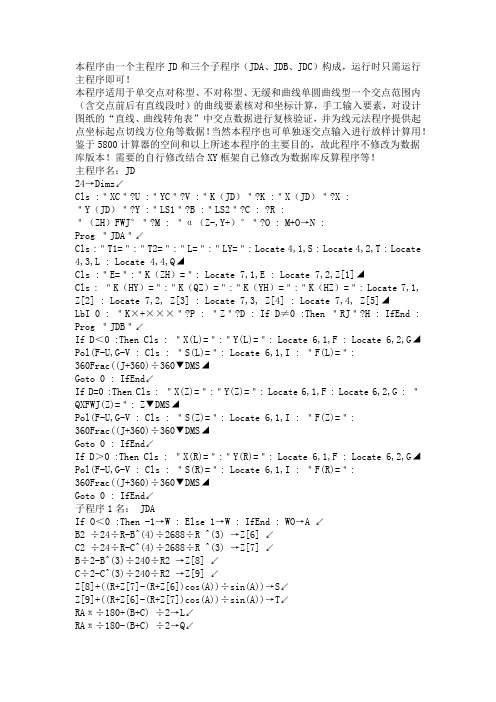
本程序由一个主程序JD和三个子程序(JDA、JDB、JDC)构成,运行时只需运行主程序即可!本程序适用于单交点对称型、不对称型、无缓和曲线单圆曲线型一个交点范围内(含交点前后有直线段时)的曲线要素核对和坐标计算,手工输入要素,对设计图纸的“直线、曲线转角表”中交点数据进行复核验证,并为线元法程序提供起点坐标起点切线方位角等数据!当然本程序也可单独逐交点输入进行放样计算用!鉴于5800计算器的空间和以上所述本程序的主要目的,故此程序不修改为数据库版本!需要的自行修改结合XY框架自己修改为数据库反算程序等!主程序名:JD24→Dimz↙Cls :"XC"?U :"YC"?V :"K(JD)"?K :"X(JD)"?X :"Y(JD)"?Y :"LS1"?B :"LS2"?C : ?R :"(ZH)FWJ°"?M : "α(Z-,Y+)°"?O : M+O→N :Prog "JDA"↙Cls :"T1=":"T2=":"L=":"LY=": Locate 4,1,S : Locate 4,2,T : Locate 4,3,L : Locate 4,4,Q◢Cls :"E=":"K(ZH)=": Locate 7,1,E : Locate 7,2,Z[1]◢Cls : "K(HY)=":"K(QZ)=":"K(YH)=":"K(HZ)=": Locate 7,1, Z[2] : Locate 7,2, Z[3] : Locate 7,3, Z[4] : Locate 7,4, Z[5]◢LbI 0 : "K×+×××"?P : "Z"?D : If D≠0 :Then "RJ"?H : IfEnd : Prog "JDB"↙If D<0 :Then Cls : "X(L)=":"Y(L)=": Locate 6,1,F : Locate 6,2,G◢Pol(F-U,G-V : Cls : "S(L)=": Locate 6,1,I : "F(L)=":360Frac((J+360)÷360▼DMS◢Goto 0 : IfEnd↙If D=0 :Then Cls : "X(Z)=":"Y(Z)=": Locate 6,1,F : Locate 6,2,G : "QXFWJ(Z)=": Z▼DMS◢Pol(F-U,G-V : Cls : "S(Z)=": Locate 6,1,I : "F(Z)=":360Frac((J+360)÷360▼DMS◢Goto 0 : IfEnd↙If D>0 :Then Cls : "X(R)=":"Y(R)=": Locate 6,1,F : Locate 6,2,G◢Pol(F-U,G-V : Cls : "S(R)=": Locate 6,1,I : "F(R)=":360Frac((J+360)÷360▼DMS◢Goto 0 : IfEnd↙子程序1名: JDAIf O<0 :Then -1→W : Else 1→W : IfEnd : WO→A ↙B2 ÷24÷R-B^(4)÷2688÷R ^(3) →Z[6] ↙C2 ÷24÷R-C^(4)÷2688÷R ^(3) →Z[7] ↙B÷2-B^(3)÷240÷R2 →Z[8] ↙C÷2-C^(3)÷240÷R2 →Z[9] ↙Z[8]+((R+Z[7]-(R+Z[6])cos(A))÷sin(A))→S↙Z[9]+((R+Z[6]-(R+Z[7])cos(A))÷sin(A))→T↙RAπ÷180+(B+C) ÷2→L↙RAπ÷180-(B+C) ÷2→Q↙(R+(Z[6]+Z[7])÷2)÷cos(A÷2)-R→E↙K-S→Z[1] ↙↙Z[1]+B→Z[2] ↙↙Z[2]+Q÷2→Z[3]↙Z[1]+L-C→Z[4]↙Z[4]+C→Z[5]↙子程序2名: JDBX-Scos(M)→Z[19]:Y-Ssin(M)→Z[20]↙X+Tcos(N)→Z[21]:Y+Tsin(N)→Z[22]↙If P>Z[1]:Then Goto 1 :IfEnd↙Z[1]-P→L↙X-(S+L)cos(M)+Dcos(Z+H)→F↙Y-(S+L)s in(M)+Dsin(Z+H)→G↙M→Z : Goto 5↙LbI 1 : If P>Z[2]:Then Goto 2 :IfEnd↙P-Z[1]→L→Z[12]:B→Z[13]rog"JDC"↙Z[19]+Z[14]cos(M)-WZ[15]sin(M)+Dcos(Z+H)→F↙Z[20]+Z[14]sin(M)+WZ[15]cos(M)+Dsin(Z+H)→G↙M+90WL2 ÷(BRπ)→Z↙Goto 5↙LbI 2 : If P>Z[4]:Then Goto 3 :IfEnd↙P-Z[1]→L:90(2L-B)÷R÷π→Z[11]↙Rsin(Z[11])+Z[8]→Z[14]:R(1-cos(Z[11]))+Z[6]→Z[15]↙Z[19]+Z[14]cos(M)-WZ[15]sin(M)+Dcos(Z+H)→F↙Z[20]+Z[14]sin(M)+WZ[15]cos(M)+Dsin(Z+H)→G↙M+WZ[11]→Z↙Goto 5↙LbI 3 : If P>Z[5]:Then Goto 4 :IfEnd↙Z[5]-P→L→Z[12]:C→Z[13]rog"JDC"↙Z[21]-Z[14]cos(N)-WZ[15]sin(N)+Dcos(Z+H)→F↙Z[22]-Z[14]sin(N)+WZ[15]cos(N)+Dsin(Z+H)→G↙N-90WL2 ÷(CRπ)→Z↙Goto 5↙LbI 4 : P-Z[5]→L↙X+(T+L)cos(N)+Dcos(Z+H)→F↙Y+(T+L)sin(N)+Dsin(Z+H)→G↙N→Z↙Goto 5↙LbI 5 : 360Frac((Z+360)÷360→Z↙子程序3名: JDCIf Z[12]=0 :T hen 0→Z[14]: 0→Z[15]:Else↙Z[12]- Z[12]^(5)÷40÷(RZ[13])2+ Z[12]^(9)÷3456÷(RZ[13])^(4)→Z[14]↙Z[12]^(3)÷6÷(RZ[13])-Z[12]^(7)÷336÷(RZ[13])^(3)+ Z[12]^(11) ÷42240÷(RZ[13])^(5)→Z[15] ↙IfEnd↙程序说明:已知数据输入:XC ? 测站X坐标YC ? 测站Y坐标K(JD)?交点桩号X(JD)?交点X坐标交点法线路坐标计算Y(JD)?交点Y坐标LS1 ?第一缓和曲线长度LS2 ?第二缓和曲线长度R ? 圆曲线半径(ZH)FWJ°?交点前(即前交点至本交点也即ZH点)的正切线方位角α(Z-,Y+)?本交点处线路转角(左转为负,右转为正,度分秒输入)K×+×××? 待求桩号Z ?待求桩号距中距离(左负值,右正值,中为0)RJ ?斜交右角(线路切线前进方向与边桩右侧夹角)计算结果显示:T1=第一切线长T2=第二切线长L=曲线总长LY=圆曲线长E=曲线外距K(ZH)=直缓点桩号K(HY)=缓圆点桩号K(QZ)=曲中点桩号K(YH)=圆缓点桩号K(HZ)=缓直点桩号X= Y=待求点的坐标(其中:L-左 Z-中 R-右)QXFWJ(Z)=待求点的中桩切线方位角(当求中桩坐标时显示)S= F=测站至待求点的水平距离、方位角(其中L-左 Z-中 R-右)。
交点法、线元法坐标计算
For personal use only in study and research; not for commercial useFor personal use only in study and research; not for commercial use3、交点法、线元法坐标计算坐标计算是根据图纸中“直线及曲线转角一览表”提供的数据计算道路中桩坐标,然后和图纸提供的“逐桩坐标表”比对,如果一样则说明输入平曲线参数输入正确,可以计算边桩坐标和其他结构物坐标了;如果中桩坐标不一样,一般是平曲线参数输入有误,需要重新检查输入,另一种结果是图纸有错,这种情况少见,但不代表没有。
“直线及曲线转角一览表”和“逐桩坐标表”见附件1、附件2。
线元法是以路线的起点坐标、方位角、起终点桩号等节点元素来计算出要求的坐标;交点法是以路线的交点要素和路线的主要要素来求得坐标。
①交点法交点:路线的转折点,路线改变方向是相邻两直线的延长线相交的点。
用JD表示,有些图纸上用IP表示。
看下图:交点是针对曲线的(包含圆曲线和缓和曲线),一段曲线就有一个交点。
交点参数有:坐标(X,Y)、交点桩号、转角值、圆曲线半径R、缓和曲线长度。
教学提供软件(轻松测量、双心软件、测量工具)交点法曲线要素输入说明:1、QD起点坐标:起点坐标必须在直线段上,或填写前一交点的坐标。
2、JD交点曲线要素:(1)交点桩号(2)交点坐标(X,Y)(3)曲线半径R(4)第一缓和曲线长度LS1,若为0,输入0,不能为空。
(5)第二缓和曲线长度LS2,若为0,输入0,不能为空。
3、ZD终点坐标:终点坐标也必须在直线段上,或填写后一交点的坐标。
检核数据是否输入正确的方法:软件生成的圆曲线要素中切线长、外距、交点里程:注意校正起点里程、等与设计图纸是否一致。
如果上述数据和图纸不一样,请认真检查有错误的交点处的数据输入是否正确,如果输入没有错误,请考虑是否包含不完整缓和曲线,使用公式A²=R*Ls检查是否包含不完整缓和曲线。
两直线的交点坐标和距离公式
两直线的交点坐标和距离公式直线是平面几何中最基本的图形之一,计算两条直线的交点坐标和距离是解决许多几何问题的基础。
在本文中,我们将详细介绍如何计算两条直线的交点坐标和距离的公式和方法。
首先,我们需要了解什么是直线。
在平面几何中,直线是由一组点组成的,这些点在同一条直线上,且直线上的任意两点可以确定直线的一条直线是由两个不同的点定义。
那么,如何计算两条直线的交点坐标呢?要计算两条直线的交点,我们需要利用直线的方程。
在平面几何中,直线可以由一般方程、点斜式方程和两点式方程表示。
1.一般方程:Ax+By+C=0。
其中A、B、C是常数。
2.点斜式方程:y-y1=m(x-x1)。
其中m是斜率,(x1,y1)是直线上的一个点。
3.两点式方程:(y-y1)/(x-x1)=(y2-y1)/(x2-x1)。
其中(x1,y1)和(x2,y2)是直线上的两个点。
像这样,当我们有两条直线的方程时,我们可以通过求解方程组,找到两条直线的交点坐标。
解方程组的方法有多种,比如代入法、消元法和克莱姆法则等。
让我们通过一个具体的例子来说明如何计算两条直线的交点坐标。
例1:已知直线L1的方程为y=2x-1,直线L2的方程为y=-x+3,求两条直线的交点坐标。
解:将L1和L2的方程联立起来,得到方程组:y=2x-1y=-x+3通过消元法,我们可以先将方程组中的y消去。
将L1中的y代入L2的方程中,得到:2x-1=-x+3整理方程,得到:3x=4解方程,得到:x=4/3将x的值代入L1的方程中,得到:y=2*(4/3)-1y=8/3-1y=5/3所以,两条直线的交点坐标为(4/3,5/3)。
接下来,我们将介绍如何计算两条直线的距离。
两条直线的距离是两条直线之间最短的直线距离,也就是垂直于两条直线的连线段的长度。
计算两条直线的距离,我们可以利用点到直线的距离公式来求解。
点到直线的距离公式:d=,Ax+By+C,/√(A^2+B^2)其中,A、B、C是直线的方程中的常数。
交点法路线计算程序(王中伟 老师作品) - 副本

右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
边 桩 坐 标 E(Y)
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
两直线交点坐标怎么求
两直线交点坐标怎么求引言在几何学中,直线是一种基本的图形元素,往往与其他直线或者曲线相交。
当两条直线相交时,我们往往希望能够求得它们的交点坐标,因为交点的坐标可以帮助我们解决很多与直线相关的问题。
本文将介绍两种常见的方法来求解两直线的交点坐标。
方法一:解方程法步骤1.确定两条直线的方程:通过确定直线上的两个点或者直线的斜率和截距,我们可以得到两条直线的方程。
2.将两条直线的方程联立:将两条直线的方程联立,构成一个方程组。
3.解方程组:通过解方程组,求解出交点的坐标。
示例假设有直线L1和直线L2,它们的方程分别为:L1: 2x + 3y = 8 L2: -4x + y = 5将这两条直线的方程联立,得到方程组:2x + 3y = 8 -4x + y = 5我们可以通过消元或代入等方法解方程组,求解出交点的坐标。
结果通过解方程组,我们可以求解出交点的坐标为(1,2)。
方法二:向量叉积法步骤1.确定两条直线上的两个点:分别从每条直线上选取两个点,记为A、B和C、D。
2.计算向量:根据选取的点,计算向量AB和向量CD。
3.计算向量叉积:计算向量AB和向量CD的叉积,得到向量E。
4.计算交点坐标:利用向量叉积的性质,可以得到交点的坐标。
示例假设有直线L1和直线L2,它们通过如下两个点确定:L1: A(1,2) B(3,4) L2: C(5,6) D(7,8)通过计算向量AB和向量CD的叉积,得到向量E的数值为(-4,4)。
根据向量叉积的性质,我们可以得到交点的坐标为(1,2)。
结果通过计算向量叉积,我们可以求解出交点的坐标为(1,2)。
总结本文介绍了两种常见的方法来求解两直线的交点坐标:解方程法和向量叉积法。
解方程法通过联立方程组,通过求解方程组的方法来求得交点的坐标。
向量叉积法则是通过计算向量的叉积,并利用叉积的性质来求得交点的坐标。
两种方法都可以有效地求解两直线的交点,选择哪种方法取决于问题的具体情况。
求直线交点坐标怎么求
求直线交点坐标的计算方法在几何学中,两条直线的交点是指两条直线在平面上的位置相交的点。
当我们遇到需要求解直线交点坐标的问题时,可以使用以下几种方法来计算。
方法一:代数法通过代数法,我们可以通过解线性方程组来求解直线交点坐标。
假设有两条直线L1和L2,可以将其表示为如下的一般方程:L1: ax + by + c1 = 0 L2: dx + ey + c2 = 0其中,a、b、c1、d、e和c2是已知的系数。
为了求解交点的坐标,我们可以按照以下步骤进行计算:1.计算行列式D:D = ae - bd2.如果D等于零,表示两条直线平行或重合,无交点;如果D不等于零,表示两条直线有且只有一个交点。
3.计算交点的x坐标:x = (ce - bf) / D4.计算交点的y坐标:y = (af - cd) / D通过以上计算,我们可以得到直线交点的坐标。
方法二:向量法向量法是另一种求解直线交点坐标的常用方法。
假设有两条直线L1和L2,可以将其表示为如下的对称式方程:L1: (x - x1) / m1 = (y - y1) / n1 L2: (x - x2) / m2 = (y - y2) / n2其中,(x1, y1)和(x2, y2)分别是两条直线上的已知点,m1、n1、m2和n2是已知的方向系数。
为了求解交点的坐标,我们可以按照以下步骤进行计算:1.计算参数t:t = ((x2 - x1) * n1 - (y2 - y1) * m1) / (m1 * n2 - m2 * n1)2.计算交点的x坐标:x = x1 + t * m13.计算交点的y坐标:y = y1 + t * n1通过以上计算,我们可以求得直线交点的坐标。
方法三:几何法除了代数法和向量法之外,我们还可以使用几何法来求解直线交点坐标。
假设有两条直线L1和L2,可以通过以下步骤进行计算:1.将直线L1和L2转化为斜率截距形式:y = k1 * x + b1, y = k2 * x +b22.计算两条直线的斜率之差:k = k2 - k13.计算两条直线的截距之差:b = b1 - b24.计算交点的x坐标:x = -b / k5.将x代入其中一条直线方程求得交点的y坐标通过以上计算,我们可以获得直线交点的坐标。
14高中数学:两条直线交点坐标全解析
高中数学:两条直线交点坐标全解析一、引言在解析几何中,两条直线的交点是一个重要的概念。
通过求解两条直线的交点坐标,我们可以了解两条直线的位置关系,进而解决一系列与直线相关的问题。
本文将详细解析高中数学中两条直线交点坐标的知识点,帮助学生更好地掌握这一内容。
二、基本概念与性质两条直线的交点是指同时满足这两条直线方程的点的坐标。
在平面上,两条直线可能有以下三种位置关系:相交、平行和重合。
当两条直线相交时,它们有且仅有一个交点;当两条直线平行时,它们没有交点;当两条直线重合时,它们有无穷多个交点。
三、求解两条直线交点的方法1.联立方程法:当两条直线的方程分别为l1:A1x+B1y+C1=0和l2:A2x+B2y+C2=0时,可以通过联立这两个方程来求解交点坐标。
即解方程组{A1x+B1y+C1=0A2x+B2y+C2=0,得到的解即为交点的坐标。
2.斜率截距法:当两条直线的方程分别为斜率截距式y=k1x+b1和y=k2x+b2时,可以直接比较斜率和截距来判断两直线的位置关系。
若k1=k2,则两直线相交,交点坐标为(k1−k2b2−b1,k1−k2k1b2−k2b1);若k1=k2且b1=b2,则两直线平行;若k1=k2且b1=b2,则两直线重合。
四、应用举例1.判断两条直线的位置关系:通过求解两条直线的交点坐标,可以判断这两条直线的位置关系。
如果求得一个交点,则两直线相交;如果无解,则两直线平行;如果有无穷多解,则两直线重合。
2.求解几何问题:在解决一些几何问题时,需要求解两条直线的交点坐标。
例如,在求两线段的中垂线交点、求三角形的外接圆等问题中,都需要求解直线的交点。
3.实际问题中的应用:在实际生活中,求解两条直线的交点坐标也有广泛的应用。
例如,在建筑设计中,可以利用交点坐标来确定建筑物的布局;在交通规划中,可以利用交点坐标来确定道路的交叉点等。
掌握这些应用有助于加深对相关知识的理解和记忆。
五、常见误区与注意事项1.误区一:误认为所有联立方程都能求出交点。
交点法坐标计算程序
1.主程序 JDFZBZFS17→DimZ: Norm 2:1→ A " XY=1,FS=2,GC=3,LJKD=4,BPFY=5,BZFY=6”?A:A=1=>Goto1:A=2=>Goto 2: A=3=>Goto 3:A=4=>Goto 4: A=5=>Goto 5: A=6=>Goto 6LbI 1:Prog "DX":LbI A:Prog"QX": 90→B: "PJ1"?B:B →C: "PJ2"?C:B→Z[1]:C→Z[8]:LbI B:1→F: "KM"?Z: Prog"X1":?D:Prog"THB":O→L: Z[2]+Z[1]-Z[8] →E:X+L cos(E) →X:Y+Lsin(E) →Y:Prog"XY":Prog"JS":Goto B LbI 2:2→F:90→Z[1] :Prog"QX":LbI C: "KM"?Z:Prog"X 1": "XO"?X: "Y0"?Y:Prog"THB":Fix 5:Prog"ZD":G oto CLbI 3:Prog"QX": 0→B: "H-B"?B:B→Z[9]:LbI D: "KM"? Z:?D:Prog"H":Fix 5: "H=": H-Z[9] →H◢"I=":I◢Goto DLbI 4:Prog"QX":LbI E: "KM"?Z:?D:Prog"GD":Fix 5:" SJGD=": Locate 6,4,L:Goto ELbI 5:Prog"QX":0.5→B:"TH-GD"?B:B→Z[19]:LbI F:2→F: 90→Z[1]:"KM"?Z:Prog "X1":"X0"?X: "Y0"?Y: "SJ GC"?H: 0→M: "M0(YDMGC) "?M: Prog"BP FY":Fix 3:S→O: "L0=":Locate 6,4,O:Prog"ZD":H-M→G:"TW=": Lcoate 6,4,G: Goto FLbI 6:Prog"DX":LbI G:Prog"QX":LbI H:1→F:90→Z[1]:"KM"?Z: Goto G:Prog"X1":?D:Prog"THB":Prog"XY":Prog"JS":Prog"H":0→M:"M0"?M:Fix 2:H-M→T:"TW=": 6,4,T◢ Goto H2. 坐标计算次程序(THB)LbI J: If F=1:Then Prog "Z":Goto 1:Else Prog "ZX":Goto 2: IfEnd: LbI 1:I+D×COS(Z[2]+Z[1]) →X: J+D×Sin(Z[2]+Z[1]) →Y: LbI 23.路基开挖边线及填方坡脚线放样程序程序名:BP FYLbI H: 13→L:H-M→G: Prog “W1”:If G <0:Then –G →G:G oto W:Else G →G:Goto TLbI W:Z[8]+Z[9]→A: If G >A:Then Goto 1:Else If G >Z[8]: Then Goto 2:Else Goto 3:IfEndLbI 1: L+Z[10]+Z[11]+Z[12]+( G -A-( Z[11]+Z[12])×0.03)×Z[7]+Z[9]×Z[6]+Z[8]×Z[5] →S:Goto ZLbI 2: L+Z[10]+Z[11]+( G -Z[8]- Z[11]×0.03)×Z[6]+Z[8]×Z[5] →S:Goto ZLbI 3: L+ G×Z[5]→S:Goto ZLbI T:Z[16]+Z[17] →B:If G >B:Then Goto 4:Else If G >Z [16]:Then Goto 5:Else Goto 6:IfEndLbI 4: L+Z[18] ×2+ (G -B-2×Z[18]×0.03)×Z[15]+ Z[17]×Z[14]+ Z[16]×Z[13]→S:Goto ZLbI 5: L+Z[18]+( G -Z[16]- Z[18]×0.03)×Z[14]+Z[16]×Z [13]→S:Goto ZLbI 6: L+ G×Z[13]→S:Goto ZLbI Z4.极坐放样计算程序(计算放样点至置仪点方位角及距离)程序名:JSX:Y:Z[11]→K:Z[12]→L:Pol(X-K, Y-L):IF J<0:Then J+360→J:IfEnd:Fix 4:” FWJ=”: J◢DMS◢Fix 5:” S=”: I◢程序名:ZDFix 3:"KM=":Locate 6,4,Z:"D=":Locate 6,4,D5.交点法正算子程序(Z)程序名:ZH2÷R÷24-H∧(4) ÷2688÷R∧(3)→A(圆曲线内移量H表示缓和曲线长)H÷2-H∧(3) ÷240÷R2→B(切垂距)((H2-N2)÷24÷R)÷Sin(Abs(P))-((H∧(4)-N∧(4))/2688/R∧(3)) ÷Sin(Abs(P))→E(R+A)tan(Abs(P) ÷2)+B-E→T:P÷Abs(P) →W0→M:H→CIf Z≤O-T:Then Z-O→S:G→Z[2]:Goto 2: IfEndIf Z≤O-T+H:Then Z-O+T→S:Prog “HX”:G+WK→Z[2]:Goto 4:IfEndIf Z≤O-T+ΠR×Abs(P) ÷180+H÷2-N÷2: Then 180(Z-O+T-0.5H) ÷R÷Π→S: A+R(1-Cos(S))→B H÷2-H∧(3) ÷240÷R2+Rsin(S)→A:R→M:G+WS→Z[2]:Goto 4: IfEnd:O-T+ΠR×Abs(P)÷180+H÷2+N÷2-Z→S:(R+N2÷R÷24-N∧(4)÷2688÷R∧(3))tan(Abs(P) ÷2)+N÷2-N∧(3) ÷240÷R2+E→T :N→H:Prog “HX”:G+P →S:S-WK→Z[2]:U+(T-A)Cos(S)-WBSin(S)→I:V+(T-A)Sin(S)+WBcos(S)→J:Goto 3:LbI 4:U+(A-T)cos(G)-WBsin(G)→I:V+(A-T)Sin(G)+WBcos(G) →J: Goto 3: LbI 2:U+Scos(Z[2])→I:V+Ssin(Z[2]) →J: LbI 3:C→H6. 交点法缓和段转化子程序(HX)程序名:HXS-S∧(5) ÷40÷R2÷H2+S∧(9)÷3456÷R∧(4) ÷H∧(4)→A:S∧(3) ÷6÷R÷H-S∧(7) ÷336÷R∧(3) ÷H∧(3)+S∧(11) ÷42240÷R∧(5) ÷H∧(5)→B:90S2÷Π÷R÷H→K:RS÷H→M7. 交点法反算子程序(ZX)程序名:ZXZ:0→D:LbI 0:Prog “Z”:Pol(X-I,Y-J):J-Z[2] →J:Isin(J) →S:Icos(J) →I:If Abs(I)<0.1:Then Z+I→Z:S→D:Goto 2:Else Goto 1: LbI 1:If M=0:Then Z+I→Z:Goto 0:Eles Pol(M-WS,I):(JMΠ)/180→I:Z+I→Z:Goto 0:IfEndLbI 28.路基标准半幅宽度计算程序程序名GD1→S: Prog “G1”:Z-C→E:(B-A)*E/S+A→L:9. 导线点子程序(DX)程序名:DX“X Z”?K:”YZ”?L:K→Z[11]:L→Z[12]10.高程计算子程序(H)程序名:HP rog “S1”:C-T→F:Z-F→S:C+T→E:G-TI→Q:If T=O:Then Q+SI→H:Goto 0:Else If Z<F:Then Q+SI→H:Goto 0:Else If Z≤E:Then Q+SI+S2÷2÷R→H:Goto 0:LbI 0:H:If D=0:Then Goto I:Else Prog “I”:H+V→H:Goto ILbI I11.高程超高计算程序(I)程序名:IIf Z[3]=1:Then Prog “I1”:Goto 1: IfEndLbI 1: If W=1:Then Goto Z:Else Goto X: IfEndLbI Z:If S=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×((N-M)×(Z-C)÷S+M)→V:Goto 2:IfEnd:LbI X:If S=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×(((3((Z-C)÷S)2-2((Z-C)÷S)∧(3))×(N-M))+M)→V:Goto 2:IfEndLbI 2:Abs(D)→E:V÷E→I:I(E-K)→V15.线路选择子程序(线路选择输0时。