周转轮系混合轮系传动比计算例题
传动比计算

传动比计算一、已知轮系中各齿轮的齿数分别为Z 1=20、Z 2=18、 Z 3=56。
求传动比i 1H 。
解:1-3为太阳轮,2为行星轮,H 为行星架8.22056133113-=-=-=--=z z n n n n i H HH03=n 8.31=∴H i1、如图所示轮系中,已知241=z ,482=z ,302='z ,903=z ,403='z ,204=z ,805=z ,求传动比i H 1。
又当 n 1=1450r/min时,n H =?(15分)2、 图示轮系,已知:Z 1=20,Z 2=40,Z 3=80,Z 4=Z 5=30,Z 6=90。
求i 16=n3=n4(n4/n6)=(z6/z4)=3 nH=n6(n1-n6)/(n3-n6)=-(z3/z1)=-4i16=-7解:1、2、3、H 为周转轮系,()()63024904821323113-=⨯⨯=-=--='Z Z Z Z n n n n i H H H3/、4、5为定轴轮系23535353-====''H n nn n n n i 得H n n 23-=联立以上二式得 ()()()()62131-=---=--H H H H H n n n n n n n n所以1911==HH n n i min /3.76191r n n H ==2、Z 1=15,Z 2=25,Z 3=20,Z 4=60。
n 1 =200r/min (顺时针)n 4=50r/min (顺时针)试求H 的转速。
解:1、4为太阳轮,2、3为行星轮,H 为行星架52015602531424114-=⨯⨯-=-=--=z z zz n n n n i H H Hmin/75550200r n n n H H H=-=-- H 的转速为75r/min ,顺时针方向。
步骤:1. 先看准图,看清图!2. 拆分!3. 按照拆分的结果进行组合!4. 1、 图示为滚齿机滚刀与工件间的传动简图,以知各轮的齿数为:Z 1=35,z 2=10,Z 3=30,z 4=70,Z 5=40,Z 6=90,Z 7=1,Z 8=84.求毛坯回转一转时滚刀轴的转数。
轮系的分类、传动比、及相关计算
定轴轮系+周转轮系
周转轮系+周转轮系
混合轮系传动比计算步骤
问题:能否通过对整个轮系 加上一个公共角速度 (-ωH) 来计算轮系的传动比?
1)首先将各个基本轮系正确的区分出来;
2)分别列出计算各个基本轮系传动比的方程式;
3)找出各个基本轮系之间的联系; 4)将各基本轮系传动比方程式联立求解。
内啮合,齿轮1、 齿轮2转向相同
外啮合,齿轮 1、齿轮2转向 相反
外啮合
内啮合
3、定轴轮系传动比的确定
n2 n2' z3 n1 z2 i23 i12 n3 n3 z2' n2 z1
z5 n4 n3 n3’ z4 i45 i34 n5 z4 n4 n4 z‘ 3
n3
n n
H 1
H 3
n4
n4 z z 3 ( 1 )2 5 6 n4 450 rpm n6 z4 z5 4 n4 nH
n4的转向与n1相同。
1250 450 ( ) 17 n3 450 ( ) 9
空间周转轮系
定轴轮系
得:n3=26.47 与n1、n6同向
例题07
n1 nH 18 70 1.875 0 nH 28 24
n1 1 1.875 nH
i1H
n1 1 1.875 2.875 nH
例2、周转轮系及其传动比
图示差动轮系中,设已知各轮齿数为Z1=15,Z2=25, Z2'=20,Z3=60;又n1=200r/min,n3=50r/min,当:(1)n1 与n3转向相同时;(2)n1与n3转向相反时,求系杆H的转速 nH的大小和方向。 H
iMH i9 12
《机械原理》 轮系的传动比
原周转轮系角速度
1 2
3
H
转化轮系中的角速度
1H 1 H 2H 2 H
3H 3 H
HH H H 0
2.传动比计算的基本思路与方法
根据定轴轮系传动比的公式,可写出转化轮系传动比
iH
13
i1H3
1H 3H
1 H 3 H
z2z3 z1 z 2
z3 z1
“-”号表示在转化机构中1H
z3 z1
2.2 周转轮系传动比的计算
1.周转轮系的组成与类型 2.传动比计算的基本思路与方法 3.注意事项 4.计算实例
例1 已知:双排外啮合行星轮系
z1 100, z2 101, z2 100, z3 99
求:传动比 iH1
解:
i1H3
1H
H 3
1 3
H H
z2 z3 z1 z2
第7章 轮系
1 轮系的类型 2 轮系的传动比 3 轮系的功能 4 轮系的设计 5 其他类型的行星传动简介
第7章 轮系
2 轮系的传动比
2.1 定轴轮系传动比的计算 2.2 周转轮系传动比的计算 2.3 混合轮系传动比的计算
2.1 定轴轮系传动比的计算
1.传动比大小的计算 2.主、从动轮转向关系的确定
只起改变方向作用
称为惰轮
定 轴 轮 系 的 传 动 比
所 有 从 动 轮 齿 数 的 连 乘积 所 有 主 动 轮 齿 数 的 连 乘积
2.1 定轴轮系传动比的计算
2 .传动比方向的确定
平面定轴轮系 所有齿轮均为直齿或斜齿圆柱齿轮,
可用(-1)m 来确定从动轮的转动方向。
m —— 外啮合的对数。
传动比为正,说明主、从动轮转向
轮系考研真题
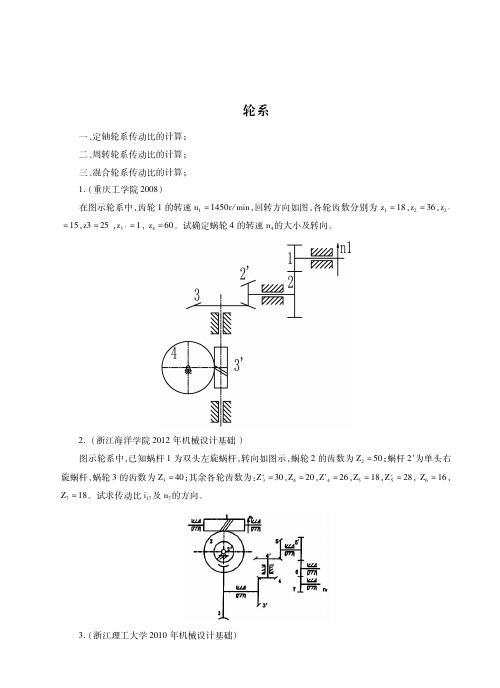
8.(山东轻工业学院 2010年) 在如图所示轮系中,已知运动由齿轮 1输入,其转速 n1=3549r/min。z1=36,z2=60,z3=23,z4 =49,z4’ =69,z5=31,z6=131,z7=94,z8=36,z9=167。 (1)分析轮系的组成,划分出各个单一的周转轮系和定轴轮系; (2)求 nH =?
2.(浙江海洋学院 2012年机械设计基础 ) 图示轮系中,已知蜗杆 1为双头左旋蜗杆,转向如图示,蜗轮 2的齿数为 Z2=50;蜗杆 2′为单头右 旋蜗杆,蜗轮 3的齿数为 Z3=40;其余各轮齿数为:Z'3=30,Z4=20,Z′4=26,Z5=18,Z'5=28,Z6=16, Z7=18。试求传动比 i17及 n7的方向。
3.(浙江理工大学 2010年机械设计基础)
在图所示差动轮系中,已知各轮的齿数 z1=30,z2=50,z2′=20,z3=75,齿轮 1的转速为 200r/min (箭头向上),齿轮 3的转速为 50r/min(箭头向下),求行星架转速 nH的大小和方向?
4.(浙江理工大学 2010年机械设计基础) 在图所示的轮系中,已知,z1=z4=40,z2=z5=30,z3=z6=100,的大小和方向。
7.(昆明理工大学 2010年机械原理考研真题) 图示的轮系中,已知各轮齿数为 z1=32,z2=34,z2’ =36,z3=64,z4=32,z5=17,z6=24,若轴 A按 图示方向以 1250r/min的转速回转,轴 B按图示方向以 600r/min的转速回转,试确定轴 C的转速大小 和方向。
9.(深圳大学 2011年机械设计基础)
图示为传动装置。1为单头右旋蜗杆,2为蜗轮,其齿数 z2=100,其余各轮的齿数分别为 z2’ =z4, z6=z8,z4’ =80,z5=20,运动由蜗杆 1和齿轮 5同时输入,由齿轮 6输出,若 n1 =n5 =1000r/min,转向 如图所示,求齿轮 6输出的运动 n6的大小和方向。
轮系的传动比计算

构件
原来的转速 转化轮系中的转速
1
n1
n1H=n1-nH
2
n2
n2H=n2-nH
3
n3
n3H=n3-nH
H
nH
nHH=nH-nH=0
转化轮系中,轮1、3间的传动比可以按定轴齿轮系传动比求解:
iH
13
n1H
n
H 3
n1 nH n3 nH
Z2Z3 Z1Z2
Z3 Z1
新能源汽车技术教学资源库
新能源汽车技术教学资源库
定轴轮系:行星架的转速为0。
n2
2
2
2
n3
23
O2
O2
O2
H
H
H
H
nH
O3
O1
OH
O3 O1
OH
O3 O1
OH
1
1
1
1
n1
3
3
3
F=2
差动轮系
F=1
行星轮系
F=1
定轴轮系
2.周转轮系的传动比计算
新能源汽车技术教学资源库
新能源汽车技术教学资源库
用“反转法”,给整个轮系加上一个(-nH),各构件间的相对 运动不变。
(2)空间定轴轮系的传动比计算
新能源汽车技术教学资源库
解:由公式
i16
n1 n6
z2 z3 z4 z5 z6 z1z2 z3 z4 z5
z2 z4 z5 z6 z1z2 z4 z5
因为齿轮1转动方向向下,所以齿轮6的转动方向向左。
三、周转轮系的传动比计算
新能源汽车技术教学资源库
1.周转轮系的组成
(1)对于圆柱齿轮组成的定轴轮系确定传动比正负的方法: a.外啮合的次数; b.画箭头。
轮系的传动比计算
轮系的传动比计算1源自新能源汽车技术教学资源库一、轮系的传动比
轮系中首末两轮的转速之比称为轮系的传动比,用iab表
示。
iab na / nb
轮系的传动比计算,包括计算传动比的大小和确定转向两 个内容。
新能源汽车技术教学资源库
二、定轴轮系的传动比计算
z5 n4 i45 n5 z4
z 2 z3 z 5 n1 3 z 2 z 3 z 4 z5 i15 (1) n5 z1 z2 z3 z4 z1 z 2 z3
新能源汽车技术教学资源库
轮系传动比的一般表达式:
n表示外啮合的次数。
n主 n 各从动轮齿数的乘积 i ( 1 ) n从 各主动轮齿数的乘积
新能源汽车技术教学资源库
例4-7
图示轮系中,已知各轮齿数z1=20,z2=40,z2’=20,z3=30,
解: (1)分解轮系 定轴轮系:轮1,2 周转轮系:轮2’,3 ,H,4 (2)分别计算各轮系传动比 定轴轮系传动比:
z4=80。计算传动比i1H。
i12
(3)联立以上两式,得
n1 z2 2 n2 z1
齿轮4既是从动轮,又是主动轮,其存在不影响传动比,但改
变了外啮合的次数,称为过桥齿轮或惰轮。
(1)对于圆柱齿轮组成的定轴轮系确定传动比正负的方法: a.外啮合的次数; b.画箭头。 (2)当轮系中包含圆锥齿轮、蜗杆蜗轮时,传动比的计算仍用上 式计算,但各轮的转向必须画箭头确定。 a.当首末两轮轴线平行时,仍用正负表示两轮之间的关系。 b.当首末两轮轴线不平行时,不能用正负表示,只能依次画箭
解得
iH1 10000
新能源汽车技术教学资源库
轮系的分类传动比及相关计算

n3H n1H
n1 ? nH n3 ? nH
??
z2 z3 z1 z'2
根据画箭头的 结果,添加负
号
此处负号表示n1H、 n3H转向相反!
此处负号表示n1、n3 转向相反
表明系杆H转向与 齿轮1转向相同,
250 ? nH ? ? 28 ? 24 ? 100 ? nH 48 ? 18
n ? 50r / min H
空间周转轮系 定轴轮系 得:n3=26.47 与n1、n6同向
例题07
如图所示为滚齿机差动传动机构。已知齿轮1、2、3的齿
数为Z1=Z2=Z3=30,蜗杆4为单头(左旋),蜗轮5的齿数为
Z5=30。当离合器M1、M2接合时,齿轮3的转向如图所示 (分齿运动),转速n3=100rpm;蜗杆4顺时针方向回转(附 加运动),转速n4=2rpm。试求此时齿轮1传给工作台的转速 n1。
此处正负号表示在转化 轮系(定轴轮系)中齿 轮G与齿轮K的转向关
系。
例1、周转轮系及其传动比
如图轮系中,已知各轮齿数 z1=28,z2=18, z2' =24,z3=70。求传动比 i1H。
解:i1H3
?
n1H n3H
?
n1 ? nH n3 ? nH
? ( ?1 )1
z2 z3 z1 z'2
n1 ? nH ? ? 18 ? 70 ? ? 1.875 0 ? nH 28 ? 24
nH的大小和方向。
解:i1H3
?
n1H n3H
?
n1 ? nH n3 ? nH
?
( ?1 )1
z2 z3 z1 z'2
① 当n1与n3转向相同时,有
200 ? nH ? ? 25 ? 60 得:nH=75 r/min ,
机械设计基础简答题计算题(附答案)
1、一对正常齿标准直齿圆柱齿轮传动。
小齿轮因遗失需配制。
已测得大齿轮的齿顶圆直径,4082mm d a =齿数1002=Z ,压力角︒=20α,两轴的中心距mm a 310=,试确定小齿轮的:①模数m 、齿数1Z ;②计算分度圆直径1d ; ③齿顶圆直径1a d ④基节b P 。
解:(1)模数m 与1z (6分)m h z d a a )2(22*+=将mm d a 4082=,2z =100带入解得:m=4 )(21)(212121mz mz d d a +=+=将m=4,2z =100,a=310mm 带入求得:551=z(2)分度圆直径:mm mz d 22055411=⨯== (3分)(3)齿顶圆直径:11(2)(552)4228a a d z h m mm *=+=+⨯=(3分)(4)基节:mm m p p b 8.1120cos 414.3cos cos =⨯⨯=== απα(3分)2、V 带传动传递的功率P=7.5kW ,平均带速v=10m/s ,紧边拉力是松边拉力的两倍(F 1=2F 2)。
试求紧边拉力F 1,有效圆周力Fe 和预紧力F 0。
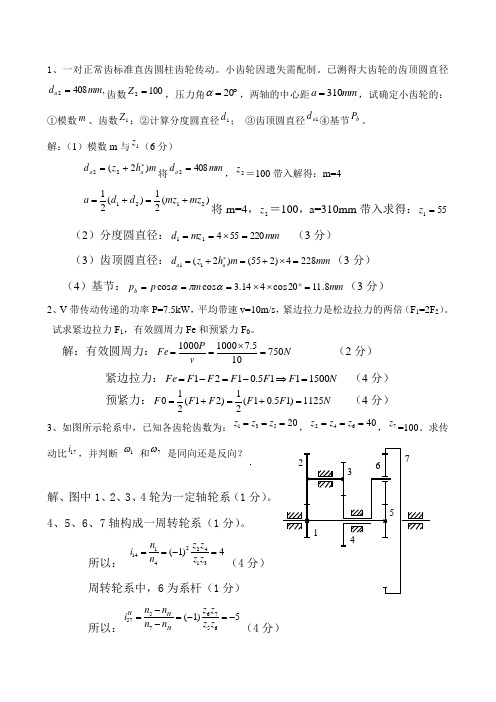
解:有效圆周力:N v P Fe 750105.710001000=⨯== (2分) 紧边拉力:N F F F F F Fe 1500115.0121=⇒-=-= (4分) 预紧力:N F F F F F 1125)15.01(21)21(210=+=+= (4分) 3、如图所示轮系中,已知各齿轮齿数为:13520z z z ===,24640z z z ===,7z =100。
求传动比17i ,并判断 1ω 和7ω 是同向还是反向?解、图中1、2、3、4轮为一定轴轮系(1分)。
4、5、6、7轴构成一周转轮系(1分)。
所以: 212414413(1)4n z z i n z z ==-=(4分) 周转轮系中,6为系杆(1分) 所以:56757756(1)5H H H n n z z i n n z z -==-=--(4分) 2314657又因为4H n n =,15n n =(1分)联立方程可以得到:117710n i n ==(2分)1ω与7ω方向相同(1分)5、在下图所示铰链四杆机构中,各杆的长度分别为: l AB = 25 mm , l BC = 55 mm , l CD = 40 mm , l AD = 50 mm , AD 为机架。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3反.对。于差动轮系,必须给定n 1 、 n k 、n H中任意两个(F=2,
两个原动件),运动就可以确定。对于简单周转轮系,有一太
阳轮固定(n k=0),在n 1 、n H只需要给定一个(F=1,需要一
个原动件),运动就可以确定。
例4:如图所示的周转轮系中,已知各 轮齿数为Z1=100, Z2=99, Z3=100, Z4=101 ,行星架H为原动件,试求传 动比iH1=?
Z2 Z4 Z1 Z3
n H = - 50/6 r/min 负号表示行星架与齿轮1转向相反。
2.求n3
:(n3
i1H2
=
nn21)- n H
n
-
2
n
H
Z2 Z1
n 2 = - 133 r/min = n3
负号表示轮3与齿轮1转向相反。
混合轮系传动比的计算
先将混合轮系分解成基本周转轮系和定轴轮系, 然后分别列出传动比计算式,最后联立求解。
周转轮系传动比的计算
+ i 1 H k n n 1 k n n H H ( 1 ) m 轮 轮 1 1 至 至 轮 轮 k k 之 之 间 间 各 各 对 对 齿 齿 轮 轮 的 的 主 从 动 动 轮 轮 齿 齿 数 数 连 连 乘 乘 积 积
注意:
1.公式只适用于平面周转轮系。正、负号可按画箭头的方法来 确定,也可根据外啮合次数还确定(-1)m。对于空间周转轮 系,当两太阳轮和行星架的轴线互相平行时,仍可用转化轮系 法来建立转速关系式,但正、负号应按画箭头的方法来确定。
用画箭头法标出转化轮系中各构件的转向关系,如图所示。
例5: 如图所示周转轮系。已知Z1=15, Z2=25, Z3=20, Z4=60,n1=200r/min, n4=50r/min,且两太阳轮1、4转向相反。试 求行星架转速n H及行星轮转速n3。
解:
1.求n H i1H4
n
-
1
n
H
n 4- n H
例6:如图所示轮系中,已知各轮
齿数Z1=20, Z2=40, Z2 ` =20 Z3=30,
Z4=80。计算传动比i1H 。
解:分解轮系
周转轮系:轮2`,3,H 定轴轮系:轮1,2
周转轮系传动比:
iH
2/4
nn24H H
n2 n4
nH nH
z4 =0 ,n2= n2 `
i12
n1 n2
z2 z1
=-2
i1H = n1 /nH = -10 负号说明行星架H与齿轮1转向相反。
解: iH1=n H / n 1 i1H4=(n 1 - n H )/ (n 4 - n H ) =1- n 1 / n H =-Z2Z4/Z1Z3
=1- i1H
i1H =-(1-99x101/100x100)=-1/10000 iH1=n H / n 1 =1/i1H =-10000
传动比为负,表示行星架H与齿轮1的转向相反。