水准测量的内业计算演示教学
四等水准测量内业计算介绍课件

- HA + HB - a + b) / 2 水准测量精度公式:σ = ±(hAB
03
- HA + HB - a + b) / √2 水准测量距离公式:d = (hAB -
04
HA + HB - a + b) / 2
数据处理
01
数据采集: 使用水准仪 和水准尺进 行测量,获 取原始数据
02
数据整理: 将原始数据 整理成表格 形式,便于 后续处理
4
测量精度
四等水准测量的精 度等级为四等
测量精度要求较高, 需要精确到毫米级
测量精度受多种因 素影响,如仪器设 备、观测方法、环 境条件等
提高测量精度的方法 包括选择高精度仪器、 采用合理的观测方法、 控制环境条件等
01
02
03
04
计算公式
四等水准测量公式:hAB = HA -
01
HB + a - b 水准测量误差公式:m = ±(hAB
4
四等水准测量的 步骤包括:设置 测站、安置仪器、 观测、记录、计 算和校核。
测量方法
1
水准测量:利用水准 仪和水准尺,测量两 点之间的高差
3
角度测量:利用经纬仪, 测量两点之间的水平角 和垂直角
距离测量:利用钢尺或 光电测距仪,测量两点 之间的水平距离
2
高程计算:利用测量 数据,计算各点的高 程和坐标
03
使用正确的 计算公式和 算法,避免 因计算方法 错误导致的 计算错误
04
对计算结果 进行验证, 确保计算结 果的准确性
计算精度
计算精度是内业计算的重要指标,直接影响测量结果 的准确性
计算精度与观测数据、计算方法、计算软件等因素有 关
水准测量内业计算
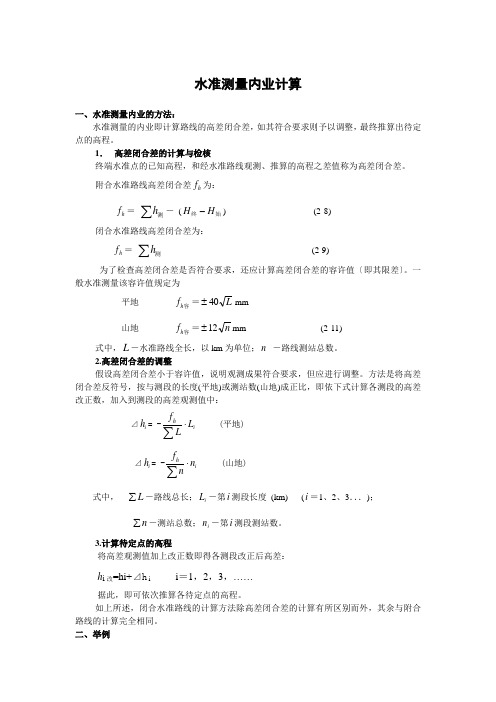
水准测量内业计算一、水准测量内业的方法:水准测量的内业即计算路线的高差闭合差,如其符合要求则予以调整,最终推算出待定点的高程。
1. 高差闭合差的计算与检核终端水准点的已知高程,和经水准路线观测、推算的高程之差值称为高差闭合差。
附合水准路线高差闭合差h f 为:h f =∑测h - (始终H H -) (2-8)闭合水准路线高差闭合差为: h f =∑测h(2-9)为了检查高差闭合差是否符合要求,还应计算高差闭合差的容许值〔即其限差〕。
一般水准测量该容许值规定为平地 容h f =L 40±mm山地 容h f =n 12±mm (2-11)式中,L ―水准路线全长,以km 为单位;n ―路线测站总数。
2.高差闭合差的调整假设高差闭合差小于容许值,说明观测成果符合要求,但应进行调整。
方法是将高差闭合差反符号,按与测段的长度(平地)或测站数(山地)成正比,即依下式计算各测段的高差改正数,加入到测段的高差观测值中:⊿i h = -i hL L f ⋅∑(平地) ⊿i h = -i hn nf ⋅∑ (山地) 式中, L ∑―路线总长;i L ―第i 测段长度 (km) (i =1、2、3...); n ∑―测站总数;i n ―第i 测段测站数。
3.计算待定点的高程将高差观测值加上改正数即得各测段改正后高差:h i 改=hi+⊿h i i =1,2,3,……据此,即可依次推算各待定点的高程。
如上所述,闭合水准路线的计算方法除高差闭合差的计算有所区别而外,其余与附合路线的计算完全相同。
二、举例1.附合水准路线算例下列图1所示附合水准路线为例,已知水准点A 、B 和待定点1、2、3将整个路线分为四个测段。
图1 附合水准路线测量成果示意图测段号 点 名 测站 数 观测高差/m 改正数 /m 改正后 高差/m 高 程 /m 备注 1 2 3 4 5 6 7 8 1 BM1 8+8.364-0.014+8.350 39.833 148.183 23-1.433-0.005-1.438 246.745 34-2.745-0.007-2.752 343.993 45+4.661-0.008+4.653BM248.646∑20+ 8.847-0.034+8.813辅助 计算h f =+ 0.034m 容h f =2012±= ±54mm1〕将点名、各测段测站数、各测段的观测高差i h 、已知高程数填入表2-2内相应栏目2、3、4、7(如系平地测量,则将测站数栏改为公里数栏,填入各测段公里数;表内加粗字为已知数据)。
水准测量原理演示图
水准测量原理演示图
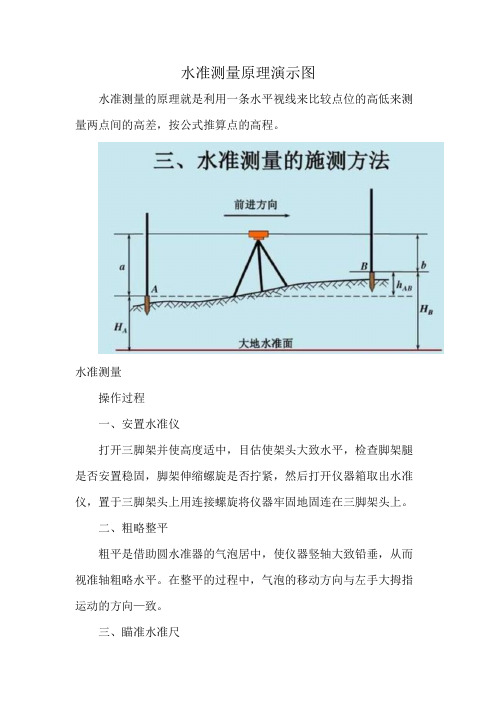
水准测量的原理就是利用一条水平视线来比较点位的高低来测量两点间的高差,按公式推算点的高程。
水准测量
操作过程
一、安置水准仪
打开三脚架并使高度适中,目估使架头大致水平,检查脚架腿是否安置稳固,脚架伸缩螺旋是否拧紧,然后打开仪器箱取出水准仪,置于三脚架头上用连接螺旋将仪器牢固地固连在三脚架头上。
二、粗略整平
粗平是借助圆水准器的气泡居中,使仪器竖轴大致铅垂,从而视准轴粗略水平。
在整平的过程中,气泡的移动方向与左手大拇指运动的方向—致。
三、瞄准水准尺
首先进行目镜对光,即把望远镜对着明亮的背景,转动目镜对光螺旋,使十字丝清晰。
然后从望远镜中观察;转动物镜对光螺旋进行对光,使目标清晰,再转动微动螺旋,使竖丝对准水准尺。
四、精平与读数
眼睛通过位于目镜左方的符合气泡观察窗看水准管气泡,右手转动微倾螺旋,使气泡两端的像吻合,即表示水准仪的视准轴已精确水平。
这是才可以读数。
水准测量 测量测绘 教学PPT课件

实际上: h观测与 h理论无法比较
BM1 1
令: fh h往测 h返测
有: fh fh容,观测成果合格;
fh fh容,观测不合格,重测。
2 3
✓结论:支水准路线往返观测具有严密性。
附合水准线路: ∑h理论= HB - HA
闭合水准线路:
∑h理论= HA - HA = 0
支水准线路:
实际上:
h观测 HBM 2 HBM1
令: fh h观测 ( HBM 2 HBM1 )
有: fh fh容,观测成果合格; BM2
fh fh容,观测不合格,重测。
2 3
✓结论:附合水准路线具有严密的检核条件。
支水准路线
支线水准路线分析: 支线水准路
线不严密,
理论上:
h理论必须? 作往返
BMA BMC
1 4 3
多 节 点 独 2立 网
2.水准点
● 用水准测量方法建立的高程控制点 (Bench Mark) 。常以BM 表示,其顶部通常为凸起的半球面, 用于放置水准尺。
● 永久性:国家、城市等级水准点 ● 临时点:工程用水准点
点之记
3.观测步骤:一个测站上的观测程序
● 距离起点A大约100米处,选定转点TP1的位置 ● 安置仪器于A、TP1中间,距离A、TP1等距离处 ● 立水准尺于后视A点、前视TP1点上 ● 观测后视尺、前视尺读数:粗平、瞄准、精平、读数,(后视读数
后视 前视
1 A 1134
1011
TP.1
1677
1554
2 TP.1 1444
1624
TP.2
1324
1508
高 差 平 均 高 改正后 高 程
(h) 差
第二讲水准测量的方法与成果计算PPT培训课件
TP3
B
TP1
TP2
BMA
测 站
转点
水准尺读数
后视(a)
前视(b)
Ⅰ
BMA TP1
2.036
1.118
Ⅱ
TP1 TP2
0.869
1.187
Ⅲ
TP2 TP3
1.495
1.078
Ⅳ
TP3 B
1.256
1.831
计算检核
∑5.656 -5.214
+0.442
∑5.214
高差(m)
+
-ቤተ መጻሕፍቲ ባይዱ
0.918
0.318
0.417
4、观测要求
(1)水准仪安置在离前、后视距离大致相等之处。 (2)为及时发现错误,通常采用“两次仪器高法”或 “双面尺法”。
两次仪器高法:高差之差h-h5mm
5、路线水准测量记录水准测量
H1=+0.918 2.036 1.118
前进方向
h1=-0.318
H1=+0.417
h1=-0.575
0.869 1.187 1.495 1.078 1.256 1.831
操作简图以组为单位,画出仪高法和高差法 进行简单水准测量的示意图????
数据记录??????
(三)路线水准测量
1、适用情景即采取路线水准测量原因:当高程待定点 离开已知点较远或高差较大时,仅安置一次仪器进行一个 测站的工作就不能测出两点之间的高差。这时需要在两点 间加设若干个临时立尺点,分段连续多次安置仪器来求得 两点间的高差。这些临时加设的立尺点是作为传递高程用 的,称为转点,一般用符号TP表示。
为了确保观测高差正确无误,须对各测站的观测高差进行检核,这种检
水准测量计算ppt课件
BMA h =+2.336m
n1=6
4
1 h=-8.653m
h=+7.357m
2ቤተ መጻሕፍቲ ባይዱ
n2=10
n3=8
3 h=+3.456m
n4=6
BMB
资金是运动的价值,资金的价值是随 时间变 化而变 化的, 是时间 的函数 ,随时 间的推 移而增 值,其 增值的 这部分 资金就 是原有 资金的 时间价 值
BMA1.hn==填+62.3写36m 观1测h数=n-=据81.6053和m 已2 h=n知+=7.38数57m 据3 1
BMA Ⅰ
TP1
2.036
1.547
0.489
48.145
TP1 Ⅱ
TP2
1.743
1.436
0.307
前进方向
后视读数 1.743
前视读数 前视点
1.436 TP2
h2
后视点 TP1
Ⅱ
A
h1
Ⅰ
HA 大地水准面
B hAB HB
资金是运动的价值,资金的价值是随 时间变 化而变 化的, 是时间 的函数 ,随时 间的推 移而增 值,其 增值的 这部分 资金就 是原有 资金的 时间价 值
前进方向
1.676
1.743
1.436 TP2
2.036
1.547
h2
TP1
Ⅱ
A
h1
Ⅰ
1.244
1.034 TP3 h3
Ⅲ
HA 大地水准面
1.418
1.765 TP4
1.889
h4
Ⅳ
h5
Ⅴ
B
hAB
HB
资金是运动的价值,资金的价值是随 时间变 化而变 化的, 是时间 的函数 ,随时 间的推 移而增 值,其 增值的 这部分 资金就 是原有 资金的 时间价 值
水准测量的内业计算步骤
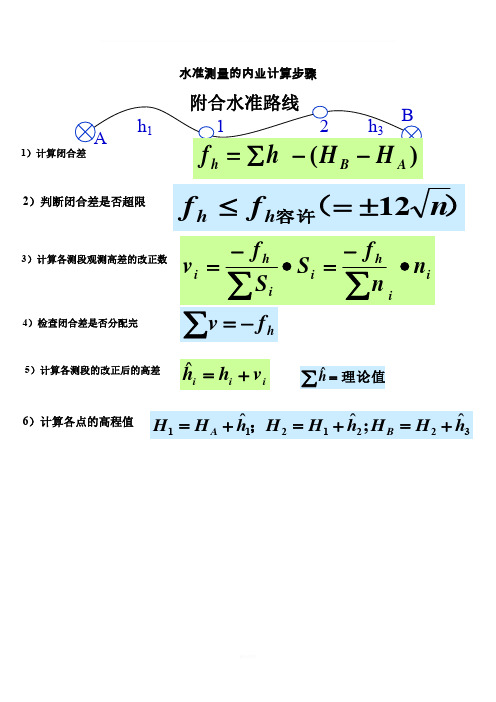
水准测量的内业计算步骤5)计算各测段的改正后的高差 6)计算各点的高程值4)检查闭合差是否分配完12)判断闭合差是否超限3)计算各测段观测高差的改正数ii i v h h +=ˆ3221211ˆ;ˆˆh H H h H H h H H B A +=+=+=;理论值=∑h ˆ导线内业计算步骤1. 闭合导线内业计算1)、绘制计算草图,在图上填写已知数据和观测数据。
2)、角度闭合差(angle closing error)的计算与调整。
(1)计算角度闭合差: ƒβ=∑β测-∑β理 = ∑β测-(n-2)⨯180o (2)计算限差:当f β≤f β容时,可将闭合差反号平均分配到各观测角中,每个角度的改正值检核: 改正后角值调整后的内角总和应等于∑β理 , 即检核: 3)、按新的角值,推算各边坐标方位角。
检核: 4)、按坐标正算公式,计算各边坐标增量。
5)、坐标增量闭合差计算与调整 (1)计算坐标增量闭合差: 因为闭合导线:∑△X 理=0 ∑△Y 理=0)("40图根级允n f ±=βnf V i /β-=βf V -=∑iV ˆ+=测ββ() 1802ˆ⨯-=∑n β右后前左后前βααβααˆ180ˆ180-+=+-= 理论值推算值αα=⎩⎨⎧⋅=∆⋅=∆ii i i i i D y D x ααsin cos ∑∑∑∑∑∑∆=∆-∆=∆=∆-∆=测理测测理测y yy f x x x f y x导线全长闭合差:导线全长相对闭合差 (2)分配坐标增量闭合差若K<1/2000(图根级),则将fx 、fy 以相反符号,按边长成正比分配到各坐标增量上去。
并计算改正后的坐标增量检核:改正后坐标增量为 检核:6)、坐标计算 检核:2.附合导线内业计算附合导线与闭合导线的计算步骤基本相同。
但由于几何条件不同,只是角度闭合差和坐标增量闭合差的计算方法有所不同,现叙述如下。
以下图为例说明:22yx D ff f +=200011/1≤=∑=∑=N f D Df K D D i x X D Df V i ∑-=∆iy Y D Df V i ∑-=∆YY X X f V f V -=∑-=∑∆∆YiiiXii i V Y YV X X ∆∆+∆=∆+∆=∆ˆˆ0ˆ0ˆ=∆∑=∆∑iiYX i i i i i i Y Y Y X X X ˆˆ∆+=∆+=后前后前理论值推算值理论值推算值Y Y X ==X(1) 计算角度闭合差: (2)(2)附合导线坐标增量闭合差为fx = Σ△X 测- Σ△X 理=Σ△X 测 - (X 终-X 始)fy = Σ△Y 测 - Σ△Y 理 =Σ△Y 测 -(Y 终- Y 始)AD()()∑∑⨯---=⨯---=180180n f n f 终始右测始终左测ααβααβββWelcome To Download !!!欢迎您的下载,资料仅供参考!。
水准测量内业计算

水准测量内业计算一、水准测量内业的方法:水准测量的内业即计算路线的高差闭合差,如其符合要求则予以调整,最终推算出待定点的高程。
1. 高差闭合差的计算与检核终端水准点的已知高程,和经水准路线观测、推算的高程之差值称为高差闭合差。
附合水准路线高差闭合差h f 为:h f =∑测h- (始终H H -) (2-8)闭合水准路线高差闭合差为:h f =∑测h(2-9)为了检查高差闭合差是否符合要求,还应计算高差闭合差的容许值〔即其限差〕。
一般水准测量该容许值规定为平地 容h f =L 40±mm山地 容h f =n 12±mm (2-11)式中,L ―水准路线全长,以km 为单位;n ―路线测站总数。
2.高差闭合差的调整若高差闭合差小于容许值,说明观测成果符合要求,但应进行调整。
方法是将高差闭合差反符号,按与测段的长度(平地)或测站数(山地)成正比,即依下式计算各测段的高差改正数,加入到测段的高差观测值中:⊿i h = -i hL L f ⋅∑(平地) ⊿i h = -i hn nf ⋅∑ (山地) 式中, L ∑―路线总长;i L ―第i 测段长度 (km) (i =1、2、3...);n ∑―测站总数;i n ―第i 测段测站数。
3.计算待定点的高程将高差观测值加上改正数即得各测段改正后高差:h i 改=hi+⊿h i i =1,2,3,……据此,即可依次推算各待定点的高程。
如上所述,闭合水准路线的计算方法除高差闭合差的计算有所区别而外,其余与附合路线的计算完全相同。
二、举例1.附合水准路线算例下图1所示附合水准路线为例,已知水准点A 、B 和待定点1、2、3将整个路线分为四个测段。
图1 附合水准路线测量成果示意图测段号 点 名 测站 数 观测高差/m 改正数 /m 改正后 高差/m 高 程 /m 备注 1 2 3 4 5 67 8 1 BM1 8+8.364-0.014 +8.350 39.833 148.183 23-1.433-0.005-1.438 246.745 34-2.745-0.007-2.752 343.993 45+4.661-0.008+4.653 BM248.646 ∑20+ 8.847-0.034+8.813辅助 计算h f =+ 0.034m容h f =2012±= ±54mm1〕将点名、各测段测站数、各测段的观测高差i h 、已知高程数填入表2-2内相应栏目2、3、4、7(如系平地测量,则将测站数栏改为公里数栏,填入各测段公里数;表内加粗字为已知数据)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(4) 每千米的测站数超过16时为山地, 否则为平地;
(5) fh容计算至整数。 3、计算观测高差的改正数vi
► 高差闭合差fh的分配原则:
将高差闭合差fh反号后按路线长度 或测站数成正比例地分配到各观测高差 中去,即得各观测高差的改正数vi 。
►观测高差改正数vi的计算公式为:
4、计算改正后高差hi改 hi改=hi+vi
说明:用 ∑ hi改 = ∑ h理 作为检核!
5、计算各未知点高程Hi
Hi =Hi-1+ hi改 说明:终点计算出的高程一定要等于其
已知高程,即H终(算)=H终(已) ! 【例题1】如下图所示,为一附合水准路
线测量成果,已知数据和观测数据均 列于图中,试求各未知点的高程Hi。
= =
v站∙ v站∙
n2= n3=
+0.5×8=+4(mm) +0.5×6=+3(mm)
v4 = v站∙ n4= +0.5×7≈+4(mm)
检核: ∑vi=-fh=+0.017m 。
无需作强制分配。
4、计算改正后高差 hi改 h1改=h1+v1=-1.352+0.006=-1.346(m) h2改=h2+v2=+2.158+0.004=+2.162(m) h3改=h3+v3=+2.574+0.003=+2.577(m) h4改=h4+v4=-3.397+0.004=-3.393(m) 检核:∑hi改=0。如不相等,说明计算 中有错误存在。
2、计算容许高差闭合差 fh容 fh容=±40 L =±40√5.8≈±96mm
因为│fh│<│fh容│ ,故其精度符合要 可做下一步计算。
求,
3、计算高差改正数vi vi=(-fh/∑L)∙Li = vkm∙ Li vkm=-fh/∑L = -0.068/5.8=-0.0117m v1 = vkm ∙ L1 =(-0.0117m)×1.0
8站
+2.158m
1
2
11站 -1.352m
+2.574m 6站
3 -3.397 m
HA=51.732m
BMA
7站
闭合水准路线的计算步骤与附合水准路线
基本相同,计算时应当注意高差闭合差的公式为: fh =∑h测。
计算步骤如下:
1、高差闭合差 fh= ∑h测=-0.017m =-17mm 2、高差闭合差的容许值
16
+1.446 -0.026 +1.420
50
+3.315 -0.068 +3.247
每千米测站数=50/5.8<16,因此为平地。 fh=+68mm L=5.8km -fh/L.376
66.939 68.961 67.203
68.623
【例题2】如下图所示,为一闭合水准路线测量成果,已知数 据和观测数据均列于图中,试求各未知点的高程Hi。
测段 编号
1
点名 2
距离L 测站数 (km)
3
4
实测高差 (m)
5
改正数 (m)
6
改正后高 差(m)
7
高程 (m)
8
1 2
3 4
∑ 辅助 计算
BMA 1.0 1 1.2
8
+1.575 -0.012 +1.563
12
+2.036 -0.014 +2.022
2 1.4
3 2.2
BMB
5.8
14
-1.742 -0.016 -1.758
fh容=±12√n=±12√32=±68mm 因为│fh│<│fh容│ ,故其精度符合要求,可做下 一步计算。
3、计算高差改正数vi vi=(-fh/∑n) ∙ ni= v站∙ ni
v站= -fh/∑n= +17/32≈+0.5(mm)
v1 = v站∙n1 = +0.5×11≈+6(mm)
v2 v3
vi=(-fh/∑n) ∙ ni
或 : vi=(-fh/∑L) ∙ Li
令v:i=v站v站=∙-nfhi/∑;n ,叫每测站改正数,因此,
又改令正:数vk,m=因-f此h/∑,L
,叫每千米(单位长度) vi= vkm∙ Li 。
►观测高差改正数vi的计算说明:
(1) 中间量v站、 vkm计算至0.0001m (0.1mm); (2) 最后改正数vi计算至0.001m(1mm) ; (3) ∑vi一定要等于-fh ,否则,强制分 配使其相等。
5、各待定点高程计算 H1=HA+h1改=51.732+(-1.346)=50.386m H2=H1+h2改=50.386+2.162=52.548m H3=H2+ h3改=52.548+2.577=55.125m
检核:
∑hi改=HB-HA=+3.247m
5、计算各未知点高程Hi 计算公式为:Hi =Hi-1+ hi改
H1=HA+h1改=65.376+1.563=66.939m H2=H1+h2改=66.939+2.022=68.961m H3=H2+h3改=68.961+(-1.758)=67.203m HB(算)=H3+h4改=67.203+1.420=68.623m HB (算) =HB(已知) = 68.623m (检核) 表格计算如下:
≈-0.012m = -12mm v2= vkm ∙ L2
=(-0.0117m)×1.2
≈-0.014m = -14mm
v3 = vkm ∙ L3 =(-0.0117m)×1.4
≈-0.016m = -16mm v4= vkm ∙ L4
=(-0.0117m)×2.2
≈-0.026m = -26mm 分检配核。: ∑vi = -fh = -68mm ,无需作强制
4、计算改正后高差hi改
各测段观测高差hi分别加上相应
的改正数vi,即得改正后高差hi改 。
h1改=h1+v1=+1.575-0.012=+1.563m
h2改=h2+v2=+2.036-0.014=+2.022m h3改=h3+v3=-1.742-0.016=-1.758m
h4改=h4+v4=+1.446-0.026=+1.420m
附合水准路线测量成果:
h1=+1.575 BMA
n1=8 L1=1.0km
1 h2=+2.036 h3=-1.742 3 h4=+1.446
2
n2=12 L2=1.2km
n3=14 L3=1.4km
n4=16 BMB
L4=2.2km
HA=65.376m HB=68.623m
计算步骤如下:
1、计算高差闭合差fh fh= ∑h测 –( HB-HA) =+3.315-(68.623-65.376)=+0.068(m)