(完整版)电机选型参考
步进电机选型样本(最新版)

常用两相四线(1.8°)电机快速选型表:电机命名规则UI24XX—L—XX04(06)A(B)���○4○5○6○71.UIROBOT优爱宝步进马达2.两相四线马达3.马达的端面尺寸型号如:20/28/35/42/57/86/1104.马达长度如:39/47/565.相电流XX代表相电流为X.X A/相6.04代表引线数为4,06代表引线数为67.输出轴型式A:单出轴B:双出轴技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameterSpecificatio技术规格Technique机械尺寸Dimensions。
电机选型信息

一、输送带电机选型信息1、电机功率:P=kFv/ηkσ=1.2(启动系数)k f=1(温度系数)k H=1(高度系数)K w=1.35(工作制系数)k= kσk f k H k w 1.62F=(1+0.3)μmg=1.3×0.3×300×9.8=1146.6N(皮带张力)v=0.2m/s(输送速度)η1=0.9(减速机效率)η3=0.95(轴承效率)η4=0.9(带传动效率)η=η=η1η32η4 =0.9×0.95×0.95×0.9=0.731皮带输送电机功率应大于P=1.62×1146.6×0.2/0.731=508.2w 2、驱动扭矩计算:T=dμmg/(2πη)T=0.1×0.3×300×9.8/(2×3.14×0.8)=17.56Nm3、综合上述电机功率750w、减速机减速比40。
对应输出扭矩T=9550*750/1400=204.6Nm,满足要求。
对应直线速度v=1400/40/60*2*3.14*50=183mm/s二、输送带旋转电机选型信息1、机构旋转扭矩分析运用运动分析方式确定机构旋转扭矩,预定机构转动角度90°,时间4s,负载重量300kg。
运动测试所得如下图,所需达到的驱动扭矩为:1965Nm。
2、伺服电机转速分析伺服电机选用大惯量伺服电机,转速为1500r/min=25r/s,预定机构转动角度90°(0.25转),时间4s,结合链轮齿数比1:2,减速机减速比为2003、转动惯量分析如下图分析,旋转方向上的转动惯量约为195kgm2设传动比为200195/2002应小于电机转子转动惯量的5倍4、综上所述机构旋转扭矩1965Nm,电机输出扭矩按传动比折算后为10Nm,选减速比200的减速系统,电机5、惯量应大于975kgmm2。
电机选型资料

谢谢观看
THANK YOU FOR WATCHING
DOCS
精度控制性能的特点
• 考虑电机的过载能力和
效率
泵
• 选择交流电机,具有结
风机
构简单、运行稳定的特点
• 考虑电机的过载能力和
效率
• 选择交流电机,具有结
构简单、运行稳定的特点
• 考虑电机的噪音和振动
性能
电机选型实例三:电动汽车
电动汽车驱动电机
• 选择交流电机,具有结构简单、运行稳定的特点
• 考虑电机的效率和能量转换性能
• 电机内部采取防爆措施,防止电气火花和危险气体泄漏
防水设计
• 电机外壳采用防水材料,具有良好的防水性能
• 电机内部采取防水措施,防止水分侵入和电气故障
电机的耐高温和低温设计
高温设计
低温设计
• 电机采用耐高温材料,具有良好的耐高温性能
• 电机采用耐低温材料,具有良好的耐低温性能
• 电机内部采取散热措施,防止电机过热损坏
选型手册
和经验公
式
考虑电机
的经济性
和维护成
本
与电机制
造商和供
应商沟
通,获取
专业建议
02
04
电机选型后的调试与维护
对电机进行调试,确保其性能达到要求
定期检查电机的运行状态,发现问题及时处理
对电机进行保养,提高其使用寿命和运行效率
07
电机的发展趋势与未来展
望
电机技术的发展与创新
电机的高效率、高性能、环保化
• 考虑电机的安装尺寸和接口形式
03
电机的主要性能参数
电机的额定功率和效率
额定功率
电动车电机选型(参考)
• 1881午,法国工程师GustaveTmuve制造丁第一辆电动 三轮车。1882年,英格兰的W.E.Agcton和Jhon Per ry组装了第二辆电动三轮车。 • 1890年,美国依阿华州诞生了第一辆电动汽车。
一、电动汽车的发展概况
一、电动汽车的发展概况
1899年,法国制造出第一辆电动汽车。 1900年,德国出现了第一辆电动汽车。 1912年,美国已大量生产电动汽车。 20世纪20年代初,在美国汽车保有量中,电动 汽车占38%,而内燃机作动力的车辆仪占22%, 1915年,美国电动汽车的保有量达5万辆。 1912年,美国工程师Charles Kettering发明了 启动机,这促进了内燃机汽车的发展。而电动 汽车由于不适应长距离行驶,发展几乎停滞。
一、电动汽车的发展概况
我国电动车行业发展:
在我国也曾多次兴起研究电动汽车的热潮,目前更是方兴 未艾。20世纪40年代及50年代末展开的电动汽车的研究与试 验.由于受技术条件的限制,未取得很大的进展。1962年,上 海公用事业研究所针对国内石油奇缺问题,以解决能源为目的, 研制出SWD—S2型电动汽车,取得不小的进展。该车的行驶速 度达到28.4km/h.续驶里程达88.2km。20世纪70年代初, 一些地方将目标瞄向电动车技术的薄弱环节蓄电池上,但因投 入的人力物力不足,研究未取得突破性进展。20世纪80年代起, 电动车辆的研究热潮迭起,1982年,我国成立了电动车辆研究 会,组织了国内外电动汽车的学术交流,对电动车辆的发展起 到了推动作用。
二、电机简介
目前的电动汽车驱动电机介绍
1、直流电机:习惯上把有换向器的直流电机称为直流电机。 优点是其电磁绕组的磁场与电枢绕组的磁场是垂直的,因而其 控制原理非常简单;通过用永磁材料代替励磁绕组后,就变成 了永磁直流电机。由于有效的利用了径向空间,使定子的直径 大大减小,并且没有磁场损失,提高了功率密度和效率。但缺 点是由于有换向器和电刷,使它的可靠性降低(火花和碳粉), 且需要定期专业维护。
电动车电机选型(参)

考虑电机性能参数与实际使用场景的匹配度
转矩与转速
根据电动车的负载需求和行驶路况,选择具有适当转矩和转速范 围的电机。
效率与能耗
优先选择高效率、低能耗的电机,有助于降低电动车的运行成本和 维护成本。
可靠性
选择经过严格质量检测和长时间验证的电机,以确保其可靠性和耐 用性。
在成本与性能之间找到平衡点
初始成本
开关磁阻电机
开关磁阻电机是一种基于磁场开关原理的电机类型。
在电动车中,开关磁阻电机主要用于辅助驱动和发电的 场合。
开关磁阻电机具有结构简单、可靠性高、成本低等优点。
然而,开关磁阻电机的控制技术较为复杂,且输出转矩 波动较大。
02
电机性能参数
功率
功率是衡量电机性能的重要参数,它 决定了电机的输出能力。在选择电机 时,需要根据电动车的负载和行驶需 求来选择合适的功率。
品牌与质量
品牌知名度高、质量可靠的电机具有 更高的可靠性和更长的使用寿命。在 选型时,应优先考虑这些品牌的电机 。
05
电机环境影响
能耗与排放
能耗
选择低能耗的电机有助于减少能源消耗 ,降低运行成本,同时减少对环境的负 担。
VS
排放
电动车电机应选择低排放或零排放的型号 ,以减少对环境的污染,符合环保要求。
一般来说,电机功率越大,电动车的 行驶速度和负载能力就越高。但是, 过高的功率可能会导致电机过热,影 响其使用寿命。
扭矩
扭矩是衡量电机输出力矩的参数,它决定了电机的加速能力 和爬坡能力。在选择电机时,需要考虑电动车的行驶环境和 需求,选择具有足够扭矩的电机。
一般来说,扭矩越大,电机的加速和爬坡能力就越强。但是 ,过大的扭矩可能会导致电机损坏或对电动车的电池造成影 响。
雷赛步进电机选型参考
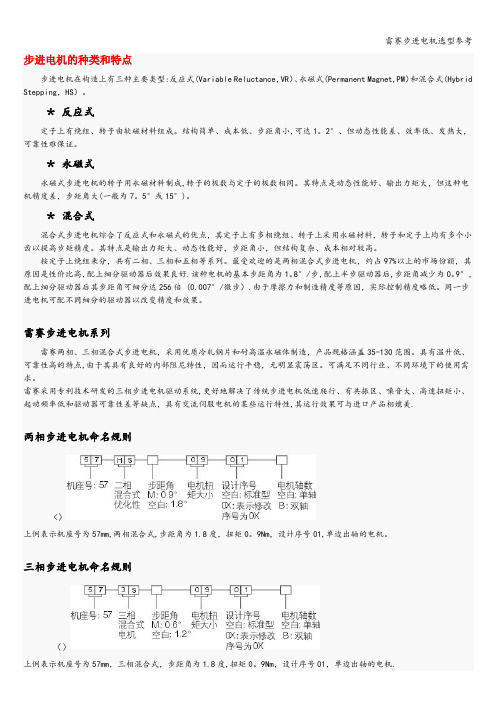
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
*反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1。
2°、但动态性能差、效率低、发热大,可靠性难保证。
*永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7。
5°或15°)。
*混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好.该种电机的基本步距角为1。
8°/步,配上半步驱动器后,步距角减少为0。
9°,配上细分驱动器后其步距角可细分达256倍 (0.007°/微步).由于摩擦力和制造精度等原因,实际控制精度略低。
同一步进电机可配不同细分的驱动器以改变精度和效果。
雷赛步进电机系列雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。
具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。
可满足不同行业、不同环境下的使用需求。
雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美.两相步进电机命名规则<〉上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0。
电机选型手册(通用型最新版)

电动机机种的选择
● 请依照要求规格,从AC小型标准电动机、调速电动机、步进电动机、AC伺服电动机中选择最适合的机种。
选用计算
● 从机械强度、加速时间、加速转矩等各方面,确认电动机/减速机的规格是否符合所有要求规格,然后再确 定电动机。每一种电动机需要确认的项目都不一样,请确认H-5页中的选用计算公式与选用重点。
Ta =(J0 · i2 + JL)·
π · θs · f2 − f1
180
t1
②自起动运行时
风扇
寿命
AC 小型 标准电动机
调速 电动机
Ta =(J0 · i2 + JL)·
π · θs 180 · n
· f22
n:3.6°/ (θs · i)
●必要转矩TM[ N·m ]的计算式 负载转矩与加速转矩之和,乘以安全系数即是必要转矩。
● 根据装置的规格确认电动机的要求规格。其基本项目如下所示。 ●运行速度及运行时间 ●定位距离及时间 ●分辨率 ●停止精度 ●保持位置 ●电源电压及频率 ●使用环境
● 计算电动机输出轴上的负载转矩及负载转动惯量。代表机构上的负载转矩的计算式请参照H-3页 。 此外,较具代表性物体形状的转动惯量的计算式请参照H-4页 。
洽询
客户咨询中心
价格、交货期 详细说明请阅览
400-820-6516(中文) 400-821-3009(日文) 注意事项 第9页
H-5
选用计算/电动机
■选用的重点
因AC小型标准电动机、无刷电动机、步进电动机、AC伺服电动机的 特性各不相同,选用时要注意的重点(确认项目)也有所差异。
●AC小型标准电动机 ①负载造成的转速变动 AC小型标准电动机的实际转速受到负载转矩的影响,相比同步转速 会降低几个百分点。 选用AC小型标准电动机时必须在发生这种转速降低的前提下选用。
电动机选配电器选型参考表(noark)

Ex9ML2 AC180 3P RCD2 Ex9C170 Ex9ML2 AC200 3P RCD2 Ex9C205 Ex9ML2 AC250 3P RCD2 Ex9C265 Ex9ML3 AC/315 3P RCD4 Ex9C330 Ex9ML3 AC/400 3P RCD4 Ex9C400 Ex9C500 Ex9C500
注: 1.此表可用于根据电动机功率或额定电流选择控制和保护电器的选型。 2.客户需按实际使用场合和所需功能进行选择电动机保护电器的种类。
上海诺雅克电气股份有限公司
电动机选配电器选型参考表
三相异步电动机(380V) 功率(kW) 90 110 132 160 200 220 250 额定电流(A) 164 201 240 289 361 407 461 漏电保护断路器 Ex9ML 交流接触器 Ex9C 热继电器 Ex9R Ex9R185 185A Ex9R500 225A Ex9R500 300A Ex9R500 400A Ex9R500 400A Ex9R500 500A Ex9R500 500A 电动机起动器 Ex9SN 电磁起动器 Ex9QC 星三角起动器 Ex9QS
Ex9R38 18A Ex9R38 24A Ex9R38 32A Ex9R38 38A Ex9R100 40A Ex9R100 50A Ex9R100 65A Ex9R100 80A Ex9R100 100A Ex9R185 115A Ex9R185 150A
Ex9ML1 AC100 3P RCD2 Ex9C100 Ex9ML1 AC125 3P RCD3 Ex9C115 Ex9ML2 AC160 3P RCD2 Ex9C150
Ex9QC05 1.6A Ex9QS09 Ex9QC05 2.5A Ex9QS09 Ex9QC05 4A Ex9QC05 6A Ex9QC05 6A Ex9QC05 8A Ex9QS09 Ex9QS09 Ex9QS09Ex9QC05 12A Ex9QS09 Ex9QC18 18A Ex9QS09 Ex9QC18 24A Ex9QS12 Ex9QC18 32A Ex9QS18 Ex9QC18 38A Ex9QS25 Ex9QS32 Ex9QS40 Ex9QS50 Ex9QS65 Ex9QS80 Ex9QS100
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
名词解释
1. 最大允许转矩:
在本产品系列中主要是对减速箱而言,减速箱的输出轴转矩随减速比的变化而变化,受材料、结构等多方面因素制约。
减速箱最大允许转矩指在保证强度、使用寿命等正常工况下可能承受(或输出)的最大转矩。
2. 传动效率:
减速箱动力传递的效能。
3. 径向负载:
电机或减速箱输出轴在半径方向上的承受载荷。
4. 轴向负载:
电机或减速箱输出轴在轴向上的承受载荷。
5. 额定:
在保持正常温度下,电机能够安全运行的限度称为额定。
例如:额定输出、额定电压、额定频率、额定转速。
额定时间:额定输出下可正常连续运转的时间称为额定时间。
连续额定:在额定输出下,可连续使用时称为连续额定。
短时间额定:在指定的固定时间做额定输出运转时称为短时间额定。
6. 输出:
单位时间对外所做的功。
额定输出:电机在额定电压、额定频率下,连续稳定的输出额定转速、额定转矩。
7. 转矩:
起动转矩:电机起动时瞬间产生的转矩。
最大转矩:电机在一定电压、一定频率下可能输出的最大转矩。
额定转矩:电机在额定电压、额定频率下可连续输出的转矩。
静摩擦转矩:电磁制动、离合器制动等在停止状况下,为保持该状态时电机的输出转矩。
容许转矩:指电机运转时所能使用的最大转矩。
该转矩受电机的额定转
矩、温升以及组合的减速箱强度所限制。
8. 转速:
同步转速:电机的固定特性参数与电机的极数、使用电源的频率有关。
Ns=120f/P(r/min)
Ns :同步转速(r/min)
f :电源频率(Hz)
p :电极极数
空载转速:标准电机、可逆电机在无负载时的转速(比同步转速低1~5%)。
额定转速:电机在额定工况下的转速(比同步转速低5~20%)。
转差率:转速的表示方式之一。
S=(Ns-N)/N (r/min)
S :转差率
Ns :同步转速(r/min)
N :任意负载时的转速(r/min)
9. 停止过转量:
电机输出轴从切断电源的瞬间到完全停止时,因惯性继续旋转的圈数(或角度)。
10.制动力:
为使电机输出轴快速减速、制动停止,或使电机输出轴保持状态所施加于电机(转子)的力。
电磁制动电机的制动力等于额定转矩。
可逆电机的制动力等于10%的额定转矩。
选用计算
在电机、减速箱的选型中,首先要确认负载的工况。
在此基础上对负载进行计算,从而确定所需配套的电机、减速箱型号,进而可以根据安装要求确定电机、减速箱的安装结构形式。
1. 皮带输送的负载计算
负载功率:
2. 缠绕升降:
负载功率:
3.水平牵引:
负载功率:
4. 回转体驱动:
负载功率:
类型GD2(回转惯量计算)盘状
管状
球体
立方体
圆柱
绕一端旋转
绕平行轴旋转
水平
运动
垂直运
动
齿轮减
速
选型举例:
①皮带轮机构
AC电机时:
此为在输送带驱动机构上使用标准电机时的选定例。
须按下述要求规格来选用电机。
(要求规格及机构规格)
皮带与工作物的总重量•••••••m1=20kg
滑动面的摩擦系数•••••••••••μ=0.3
滚轮的直径••••••••••••D =100mm
滚轮的重量•••••••••••••m2=1kg
皮带•滚轮的效率••••••••••η = 0.9
皮带的速度••••••••V = 140mm/s±10%
电机电源•••••••••••单相110V60Hz
工作时间•••••••••••1天8小时运转
②决定减速箱的减速比:
减速比输出轴转速:
N G=(V•60)/(π•D)=((140±14)×60)/(π×100)=26.7±2.7[r/min]
因电机(4极)在60Hz时的额定转速为1450~1550r/min,所以应选择在此范围内的减速比i=60。
减速箱的减速比i为:
i=(1450~1550)/N G=(1450~1550)/(26.7±2.7)=49.3~64.6
计算必要转矩:
输送带起动时所需的转矩为最大。
先计算起动时的必要转矩。
滑动部的摩擦力F,
F=μm·g=0.3×20×9.807=58.8[N]
负载转矩T L=F·D/2·η+(58.8×100×10-3)/(2×0.9)=3.27[N·m]
此负载转矩为减速箱输出轴的数值,因此需换算成电机输出轴的数值。
电机输出轴的必要转矩T M
T M=T L/i·ηG=3.27/(60×0.66)=0.0826[N·m]=82.6[mN·m]
(减速箱的传导效率ηG=0.66)
按使用电源电压波动(220V±10%)等角度考虑,设定安全率为2倍。
82.6×2≈165[mN·m]
起动转矩为165mN·m以上的电机,可参阅标准电机型号/性能表来选择。
电机:90YS40GV22,再选用可与90YS40GV22组合的减速箱90GK60H。
④确认负载惯性惯量:
皮带·工作物的惯性惯量J m1=m1×(π×D/ 2π)2
=20×(π×100×10-3/2π)2
=500×10-4[kg·m2]
滚轮的惯性惯量J m2=1/8×m2×D2
=1/8×1×(100×10-3)2
=12.5×10-4[kg·m2]
减速箱输出轴的全负载惯性惯量
J=500×10-4+12.5×10-4×2=525×10-4[kg·m2]
此处90GK60H的容许负载惯性惯量请参阅前述数据。
J G=0.75×10-4×602=2700×10-4[kg·m2]
因J>J G,即负载惯性惯量为容许值以下,故可以使用。
且所选用的电机额定转矩为260mN·m,较实际负载转矩为大,因此电机能以比额定转速更快的转速运转。
再依据无负载时的转速(约1750r/min)来计算皮带的速度,确认所选制
品是否符合规格要求。
以上确认结果为均能满足规格要求。
V=(N M·π·D)/60·i=(1750×π×100)/(60×60)=152.7[mm/s] (电机转速N M)
综上所述,对负载工况的分析、负载计算,是选用电机、减速箱的基础。
有关详细的计算可参阅《机械设计手册》中相关章节。
通过负载计算,装配中应该注意的事项,总体是寄予用户合理、安全可靠的选择本系列产品。
这只是选型与安装的过程,有关控制回路的接线与整机的配套使用,请参阅相关部分。