冗余并联机构的精度分析
一种冗余并联机构的探讨

l84
合理的方法 ,才能使设计结果达到理想的程度。 2.1 建模
由于建 模 的方法 步 骤各 种 各样 ,并 且 相 对 于机 构 来 说 ,由于各 组 成部 件 的基 本 结构 也 比较简 单 ,并 且 很 多 都 是标 准 零 件 ,如 导 轨 ,丝杠 ,很 多 公 司提 供 标 准部 件 模 型下 载 服务 ,这也 给 我 们 的建模 过 程 减 轻 了很 多工作 量 。可 以根据 设计 要求 ,选 用相 应公 司
Discussion on A Redundant Parallel M achine Tool
LI Bing
(Jiangsu Food Science College,Huaian Jiangsu 223003,China)
Abstract:This article designs a kind of laser cutting equipment which is connected in series and paralle1.The redundancy cutting machine tool is composed of parallel mechanism and series mechanism.Parallel mechanism using tripteron parallel robot structure.Parallel mechanism using tf ipteron parallel robot str u cture,by the column,linear guide,ball screw,sliding saddle,Ding Changda a rm ,f ixed length of small arm,moving platform ,laser cutting. Key words:series;parallel mechanism ;redundancy;cutting machine tool
冗余驱动并联机械手运动精度校准方法研究

冗余驱动并联机械手运动精度校准方法研究
张凯;孙德全;刘石林
【期刊名称】《机械设计与制造》
【年(卷),期】2024()4
【摘要】针对冗余驱动并联机械手(RAPM)的运动精度,以某三自由度主轴头为例,提出了一种基于最小误差模型的运动精度校准方法。
首先通过消除冗余几何源误差,建立包含最少几何源误差的最小误差模型,采用蒙特卡罗模拟进行几何源误差灵敏度分析,研究各几何源误差对终端精度的相对影响。
在此基础上提出了粗校准和精校准相结合的分层辨识策略,以实现冗余驱动并联机械手的精度校准。
最后通过校准实验测试表明,所提出的校准方法能够大幅降低冗余驱动并联机械手的终端误差,验证了所提校准方法的有效性。
【总页数】8页(P317-324)
【作者】张凯;孙德全;刘石林
【作者单位】郑州旅游职业学院机电工程学院;河南科技大学机电工程学院
【正文语种】中文
【中图分类】TH16
【相关文献】
1.采用冗余驱动提高并联机床精度的研究
2.采用过约束冗余驱动提高球面并联机构精度容错能力的研究
3.冗余驱动并联机械手的混合位置/力自适应控制
4.遗传算法
优化的运动冗余3-PRRR平面并联机械手控制研究5.采用混合算法优化的3⁃P RRR并联冗余机械手驱动力矩研究
因版权原因,仅展示原文概要,查看原文内容请购买。
冗余驱动并联机构运动学分析与驱动优化研究的开题报告

冗余驱动并联机构运动学分析与驱动优化研究的开题报告题目:冗余驱动并联机构运动学分析与驱动优化研究一、研究背景并联机构是一种重要的机构形式,具有很多优点,如结构简单、负载能力高、刚度大等。
但在实际工程应用中,由于平台姿态受到机构结构的限制,机构的运动空间和工作空间存在局限性。
为了解决这个问题,人们提出将冗余自由度引入并联机构中,能够扩展其运动自由度和工作空间,提高其性能和适用范围。
此外,在机构设计中驱动方式的选择也对机构性能和适用范围有着重要的影响。
因此,对冗余驱动并联机构的运动学分析和驱动优化进行研究,对于提高并联机构的性能和适用范围具有重要的理论意义和工程应用价值。
二、研究内容1.冗余驱动并联机构运动学分析:分析冗余驱动并联机构的运动学特性和数学模型,确定控制参数,分析驱动方式的影响,并建立数学模型。
2.冗余驱动并联机构驱动优化:研究冗余驱动并联机构的驱动方式和控制策略,优化驱动方案和参数,提高机构的性能和适用范围。
三、研究方法1.理论研究:分析冗余驱动并联机构的运动学特性和数学模型,确定控制参数,分析驱动方式的影响,并建立数学模型。
2.仿真模拟:通过ANSYS、ADAMS等仿真软件对冗余驱动并联机构进行模拟,模拟机构的运动学特性和运动轨迹,评估驱动方案和控制策略的优劣。
3.实验研究:设计并搭建具有冗余驱动的并联机构样机,进行实验研究,验证理论分析和仿真模拟结果,提高机构的性能和适用范围。
四、预期成果1. 建立冗余驱动并联机构的数学模型,分析控制参数和驱动方式对机构性能和适用范围的影响。
2.提出优化驱动方案和参数的方法和策略,提高机构的性能和适用范围。
3.设计搭建冗余驱动并联机构样机,验证理论分析和仿真模拟结果,提高机构的性能和适用范围。
五、研究价值本项目的研究成果能够对提高并联机构的性能和适用范围具有重要的理论意义和工程应用价值,能够推进并联机构在工程应用中的广泛使用。
《6PUS-UPU冗余驱动并联机器人的冗余力控制实验研究》范文

《6PUS-UPU冗余驱动并联机器人的冗余力控制实验研究》篇一一、引言随着机器人技术的快速发展,并联机器人因其在高精度、高速度和高负载能力方面的优势,被广泛应用于各个领域。
然而,如何有效地控制并联机器人的运动和力成为了一个重要的问题。
本论文旨在通过实验研究,对6PUS-UPU冗余驱动并联机器人进行冗余力控制,以期实现更高的操作精度和稳定性。
二、6PUS-UPU冗余驱动并联机器人概述6PUS-UPU冗余驱动并联机器人是一种新型的并联机器人,具有六个独立的运动驱动装置和一个额外独立位置的调节器(即“UPU”单元)。
这种结构使得该机器人具有更高的灵活性和更强的冗余性,能够更好地应对各种复杂的工作环境。
三、冗余力控制方法在并联机器人的控制中,冗余力控制是一种重要的方法。
该方法通过引入额外的力控制量,使得机器人在运动过程中能够根据需要调整各个驱动器的输出力,以达到优化性能和增强稳定性的目的。
在6PUS-UPU冗余驱动并联机器人的控制中,我们采用了基于优化算法的冗余力控制方法。
四、实验设计与实施为了验证冗余力控制方法的有效性,我们设计了一系列实验。
首先,我们建立了机器人的数学模型,并利用仿真软件对冗余力控制方法进行了初步验证。
然后,我们设计了一个实验平台,用于实际测试机器人的性能。
在实验中,我们采用了多种不同的任务和场景,以检验机器人在不同条件下的表现。
五、实验结果与分析通过实验数据,我们可以看到采用冗余力控制方法的6PUS-UPU冗余驱动并联机器人在各种任务和场景下均表现出了较高的精度和稳定性。
与传统的并联机器人相比,该机器人在面对复杂的工作环境和任务时,能够更好地调整自身的输出力,以适应不同的需求。
此外,我们还发现,在采用优化算法的情况下,机器人的运动轨迹更加平滑,速度和加速度的波动也得到了有效控制。
六、结论本论文通过实验研究,对6PUS-UPU冗余驱动并联机器人的冗余力控制进行了深入探讨。
实验结果表明,采用冗余力控制方法的机器人具有更高的精度和稳定性,能够更好地适应各种复杂的工作环境和任务。
一种冗余约束并联机构运动学分析

何法与反变换法相结合的方法对一种模块化的六自由度串联机
器人进行了运动学分析并成功求解出了该串联机器人的逆运动
学解析解遥 相对于数值求解方法袁由封闭解法求出的解析解精度
高尧 求解速度快袁 所以封闭解法是机器人运动学求解的常用方
法袁 只有在无法求出解析解的情况下才会采用数值方法对机器
人进行运动学分析遥
针对并联机构的运动学分析袁其难点在于正运动学求解遥 本
38
一种冗余约束并联机构运动学分析
一种冗余约束并联机构运动学分析
运蚤灶藻皂葬贼蚤糟泽 粤灶葬造赠泽蚤泽 燥枣 葬 砸藻凿怎灶凿葬灶贼 悦燥灶泽贼则葬蚤灶藻凿 孕葬则葬造造藻造 酝藻糟澡葬灶蚤泽皂
沈南燕 禹 壮 李 静 叶 飞 耿 亮 王梓睿
渊上海大学上海市智能制造及机器人重点实验室袁上海 圆园园源源源冤
由上述并联机构的结构约束条件可知院
则员 越则圆 越怎员圆 越怎圆圆 越咱怎曾 怎赠 怎扎 暂
扇缮设怎员员 越怎圆员 越咱园 员 园暂
渊员冤
墒设则猿 越咱园 员 园暂
怎员员窑怎员圆 越园
渊圆冤
粤员 月员窑则员 越园
渊猿冤
粤猿 月猿窑则猿 越园
如 图 员 所 示 袁月员尧 月圆尧月猿 分别是支链 员尧支 链 圆尧 支链 猿 三根直动
链与定平台连接副的中
心 点 袁月 为 月员月圆 的 中 点遥 粤员尧粤圆尧粤猿 分别是该 三根直动链与动平台连
接 副 的 中 心 点 关节变量 择蚤渊蚤越员噎猿冤 分 别 为 粤员月员尧粤圆月圆尧粤猿月猿 的 长 度 遥 吟粤员粤圆粤猿 和
图 员 并联机构结构简图
吟月员月圆月猿 为等腰三角形袁其中 月员月猿越月圆月猿袁粤员粤猿越粤圆粤猿遥 月月圆尧月月猿尧 粤粤圆尧粤粤猿 的长度分别为 遭员尧遭圆尧葬员尧葬圆遥 分别在定平台和动平台上 建立坐标系 月原曾赠扎 和 粤原怎增憎袁 其中坐标系 月原曾赠扎 的 曾 轴方向 为 月 指向 月猿袁赠 轴方向为 月 指向 月圆曰坐标系 粤原怎增憎 的 怎 轴方向 为 粤 指向 粤猿袁增 轴方向为 粤 指向 粤圆遥 并且向量 怎员员 和 怎圆员 的方向 分别与支链 员 和支链 圆 的虎克铰的第二个旋转关节的轴线平行袁 向量 则员尧则圆尧则猿 的方向分别与支链 员尧支链 圆尧支链 猿 的旋转副的旋 转轴线平行遥 由库兹贝奇准则可得袁该并联机构有一个自由度袁但 由于其存在两个冗余约束袁所以该并联机构的自由度数为 猿遥 圆 运动学分析 圆援员 并联机构逆运动学分析
并联机器人的雅可比,可操作性,条件数和精度

并联机器人的雅可比,可操作性,条件数和精度(翻译论文)虽然在最早的机器人研究中就已经有了雅可比矩阵的概念、可操纵性、条件数的概念,但是它们的真正意义并不是很好理解。
在本文中,我们重新审视这些作为并联机器人优化设计精度指标的概念。
首先,我们指出,通常的雅可比矩阵的输入—输入方程可能不足以分析平台的定位误差。
然后我们检验可操纵性的概念,表明其经典的解释是错误的。
我们考虑各种常见的局部灵巧指数,其中大部分是基于雅可比矩阵的条件数。
值得注意的是,即使对于一个给定的机器人,在一个特定的姿态也会有各种各样的条件数,这些条件数之间都不一致,和我们想得到的精度指标也不一致。
然后考虑了全局调节指数。
除了存在基于错误的局部准确性指数的问题外,还有一个忽略了大部分时间而进行计算的计算问题。
最后,我们检验了其他哪些指标可用于优化设计,并且介绍了计算它们的难度。
1 引言我们将使用一个相对通用的非冗余并联机构的定义。
当一个机构用至少两个运动链来控制自由度n<6的末端执行器时,我们定义它为并联机构,而其他的6-n 个自由度是一个恒定值通过单自由度驱动关节控制。
此外,如果将驱动器锁定,则末端执行器的自由度为0,非驱动关节有一个单自由度。
这样的定义涵盖了经典的六自由度机器人,比如Gough 和Hexa 平台,还有少于六自由度的机构,如Delta 和3-UPU 机构。
如今,并联机构的应用领域越来越广,如望远镜、精定位装置、包装速度快、机床、医疗。
对尺寸非常的敏感是并联机构优化设计的一个关键问题。
最优设计的方法有静力学性能指标。
精度显然是许多应用中的一个关键问题。
并联机构也有串联机构的一些关键问题,因此,针对这些问题做了很多广泛的研究,定义除了很多准确性指标,这些结果已经应用到并联机构上。
本文的目的是检验这些指标是否适用于并联机构。
雅可比矩阵和逆雅可比矩阵用于研究末端执行器的定位精度的,为了这个目的,很有必要研究它们的概念。
冗余并联机构的精度分析
冗余并联机构的精度分析作者:殷小龙来源:《科技资讯》 2015年第11期殷小龙(大连大学机械工程学院辽宁大连 116622)摘要:精度和误差是并联机构的重要评价指标,在实际工程中,对并联机构都有很高的精度和误差的要求。
在理论上,并联机构应该比串联机构的精度更高,但由于并联机构具有奇异位形,因此并联机构的精度甚至还没有串联机构高。
该文求出了2自由度非冗余并联机构和冗余并联机构的精度和误差表达式,分析了一类奇异点和二类奇异点在精度方面的差别。
同时指出,要想部分甚至于完全消除机构的奇异位形,引入驱动冗余这一概念是个非常好的方法。
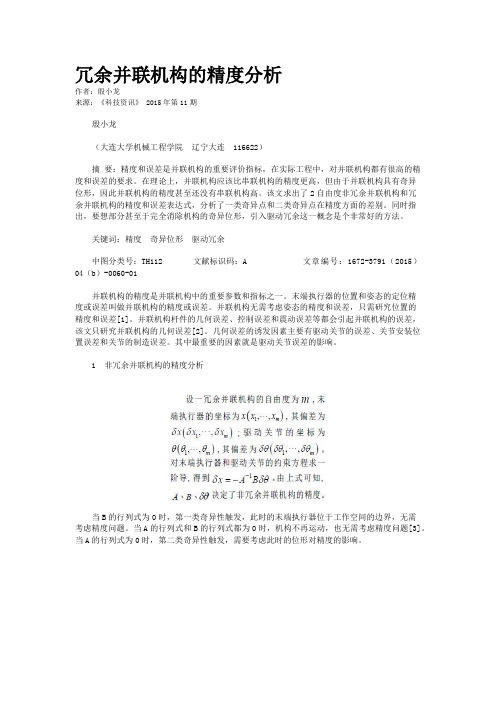
关键词:精度奇异位形驱动冗余中图分类号:TH112 文献标识码:A 文章编号:1672-3791(2015)04(b)-0060-01并联机构的精度是并联机构中的重要参数和指标之一。
末端执行器的位置和姿态的定位精度或误差叫做并联机构的精度或误差。
并联机构无需考虑姿态的精度和误差,只需研究位置的精度和误差[1]。
并联机构杆件的几何误差、控制误差和震动误差等都会引起并联机构的误差,该文只研究并联机构的几何误差[2]。
几何误差的诱发因素主要有驱动关节的误差、关节安装位置误差和关节的制造误差。
其中最重要的因素就是驱动关节误差的影响。
1 非冗余并联机构的精度分析当B的行列式为0时,第一类奇异性触发,此时的末端执行器位于工作空间的边界,无需考虑精度问题。
当A的行列式和B的行列式都为0时,机构不再运动,也无需考虑精度问题[3]。
当A的行列式为0时,第二类奇异性触发,需要考虑此时的位形对精度的影响。
2 冗余并联机构的精度分析3 结语对于非冗余并联机构,误差最大值在第二类奇异曲线上。
在除去奇异曲线的其他区域内,越靠近奇异位形,机构的误差也就越大。
对于冗余并联机构,误差最小的地方在工作空间的中心,越接近工作边界误差越大。
参考文献[1] Y uefa Fang,Lung-Wen Tsai.Structure Snythesis of a Class of 4-DOF and 5-DOF parallel Manipulator with Identical Limb Sturctures[J].The International Journal of Robitcis Research,Vol.21 No.9, September 2014,pp 799-810.[2] X ianwen Kong,Clement M.Gosselin.Type Synthesis of 3T1R 4-DOF Parallel Manipulators Based on Screw Theory[J].IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION,VOL.20,NO.2,APRIL 2004.[3] 杨廷力.机器人机构拓扑机构学[M].北京:机械工业出版社,2004.[4] C leary K.et Arai T.A prototype parallel manipulator:kinematics construction,software, workspace results and singularity analysis[J].In IEEEInt.Conf.on Robotics and Automation, pages 566-571,Sacramento,11-14 Avril2013.。
《6PUS-UPU冗余驱动并联机器人的冗余力控制实验研究》范文

《6PUS-UPU冗余驱动并联机器人的冗余力控制实验研究》篇一一、引言随着机器人技术的不断发展,并联机器人因其高精度、高效率及高稳定性的特点,在工业、医疗、军事等领域得到了广泛应用。
6PUS-UPU冗余驱动并联机器人作为一种新型的机器人结构,具有更高的灵活性和适应性。
然而,其复杂的运动学和动力学特性使得其控制问题变得尤为复杂。
特别是其冗余力控制问题,已成为该类机器人研究的重要方向。
本文将针对6PUS-UPU冗余驱动并联机器人的冗余力控制进行实验研究,旨在为该类机器人的应用提供理论依据和技术支持。
二、6PUS-UPU冗余驱动并联机器人概述6PUS-UPU冗余驱动并联机器人是一种具有六个独立驱动的UPS(Universal Parallel Steering)腿和PU(Parallel Unscrewing)模块的机器人。
该机器人结构复杂,具有较高的灵活性和适应性,可广泛应用于各种复杂环境下的作业任务。
然而,其冗余驱动和冗余力控制问题使得其控制难度较大。
三、冗余力控制方法针对6PUS-UPU冗余驱动并联机器人的冗余力控制问题,本文采用了一种基于优化算法的冗余力控制方法。
该方法通过优化机器人的运动轨迹和驱动力分配,实现机器人在完成作业任务的同时,尽可能地减小机器人的能耗和应力。
具体而言,该方法首先建立机器人的动力学模型,然后根据作业任务的需求,设计出合适的优化目标函数。
通过求解该目标函数,得到机器人的最优运动轨迹和驱动力分配。
四、实验设计为了验证上述冗余力控制方法的有效性,我们设计了一系列的实验。
首先,我们搭建了6PUS-UPU冗余驱动并联机器人的实验平台,并对其进行了详细的参数标定和性能测试。
然后,我们设计了多种不同的作业任务,包括搬运、装配、打磨等。
在每种任务中,我们分别采用传统的力控制方法和基于优化算法的冗余力控制方法进行实验。
五、实验结果与分析通过对比实验结果,我们发现,基于优化算法的冗余力控制方法在6PUS-UPU冗余驱动并联机器人的控制中具有显著的优越性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
冗余并联机构的精度分析
作者:殷小龙
来源:《科技资讯》 2015年第11期
殷小龙
(大连大学机械工程学院辽宁大连 116622)
摘要:精度和误差是并联机构的重要评价指标,在实际工程中,对并联机构都有很高的精度和误差的要求。
在理论上,并联机构应该比串联机构的精度更高,但由于并联机构具有奇异
位形,因此并联机构的精度甚至还没有串联机构高。
该文求出了2自由度非冗余并联机构和冗
余并联机构的精度和误差表达式,分析了一类奇异点和二类奇异点在精度方面的差别。
同时指出,要想部分甚至于完全消除机构的奇异位形,引入驱动冗余这一概念是个非常好的方法。
关键词:精度奇异位形驱动冗余
中图分类号:TH112 文献标识码:A 文章编号:1672-3791(2015)04(b)-0060-01
并联机构的精度是并联机构中的重要参数和指标之一。
末端执行器的位置和姿态的定位精
度或误差叫做并联机构的精度或误差。
并联机构无需考虑姿态的精度和误差,只需研究位置的
精度和误差[1]。
并联机构杆件的几何误差、控制误差和震动误差等都会引起并联机构的误差,该文只研究并联机构的几何误差[2]。
几何误差的诱发因素主要有驱动关节的误差、关节安装位置误差和关节的制造误差。
其中最重要的因素就是驱动关节误差的影响。
1 非冗余并联机构的精度分析
当B的行列式为0时,第一类奇异性触发,此时的末端执行器位于工作空间的边界,无需
考虑精度问题。
当A的行列式和B的行列式都为0时,机构不再运动,也无需考虑精度问题[3]。
当A的行列式为0时,第二类奇异性触发,需要考虑此时的位形对精度的影响。
2 冗余并联机构的精度分析
3 结语
对于非冗余并联机构,误差最大值在第二类奇异曲线上。
在除去奇异曲线的其他区域内,越靠近奇异位形,机构的误差也就越大。
对于冗余并联机构,误差最小的地方在工作空间的中心,越接近工作边界误差越大。
参考文献
[1] Y uefa Fang,Lung-Wen Tsai.Structure Snythesis of a Class of 4-DOF and 5-DOF parallel Manipulator with Identical Limb Sturctures[J].The International Journal of Robitcis Research,Vol.21 No.9, September 2014,pp 799-810.
[2] X ianwen Kong,Clement M.Gosselin.Type Synthesis of 3T1R 4-DOF Parallel Manipulators Based on Screw Theory[J].IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION,VOL.20,NO.2,APRIL 2004.
[3] 杨廷力.机器人机构拓扑机构学[M].北京:机械工业出版社,2004.
[4] C leary K.et Arai T.A prototype parallel manipulator:kinematics construction,software, workspace results and singularity analysis[J].In IEEE
Int.Conf.on Robotics and Automation, pages 566-571,Sacramento,11-14 Avril2013.。