基于Delta机构的冗余驱动三维平动并联机构研究
Delta型并联机构优化设计技术研究
东 北
大 学
2012 年 6 月
A Dissertation in Mechanical Design and Theory
Study on the Techniques of Optimization Design of Delta Parallel Mechanism
By Li Yanjie
学位论文作者签名: 签字日期:
导师签名: 签字日期:
-I-
东北大学硕士学位论文
摘要
Delta 型并联机构优化设计技术研究 摘 要
并联机构由固定平台、运动平台以及连接两者之间两个及两个以上的运动链 组成,驱动方式为并联,并且是一种闭环机构,它的自由度有两个或者两个以上。 它的结构稳定,承受载荷能力强,刚度大,无累积放大效应,运动的精度高。 随着对并联机构的研究的日趋深入,新型的并联机器人不断出现,1986 年发 明了 Delta 型并联机器人,并迅速在工业领域取得了成功。目前,国外在并联机 构领域的产业化方面已经取得了突破性进展,并且创造出了巨大的经济效益。而 在国内,由于起步晚,相关理论和关键技术的研究滞后,在生产实际中的并联机 构的应用情况并不理想。 本文以 Delta 型并联机构作为研究对象,围绕其尺寸参数的优化设计进行了 深入的研究,对它的工作空间指标、运动学灵巧度指标、刚度性能指标、动力学 性能指标进行了综合分析与优化设计,为解决这种多目标优化问题,提供了一种 切实可行的方法。具体的研究内容包括: (1)几何学,运动学和动力学的结构建模。 (2)对 Delta 型并联机构的各项性能指标进行了综合的分析。包括:工作空间 指标,运动学灵巧度性能指标,刚度性能指标,动力学性能指标等。 (3)针对不同性能指标下的最优尺寸参数,找到了一个切实可行的解决方法。 同时由于尺寸参数的数目较多,因此在最优化的过程中运用了遗传算法求解这一 问题。 (4)由于 Delta 型并联机器人有不同的性能指标,因此,如何综合这些性能指 标,选出一组能够体现并联机器人各项特性的尺寸参数是十分重要的。这就是并 联机构多目标的尺度综合问题。为解决这一尺度综合问题,运用多目标优化的概 念,通过使用遗传算法,对并联机器人的尺度综合问题进行了研究。 关键词:Delta 机构;并联机构;优化设计;遗传算法;多目标优化;尺度综合
冗余驱动并联机构运动学分析与驱动优化研究的开题报告

冗余驱动并联机构运动学分析与驱动优化研究的开题报告题目:冗余驱动并联机构运动学分析与驱动优化研究一、研究背景并联机构是一种重要的机构形式,具有很多优点,如结构简单、负载能力高、刚度大等。
但在实际工程应用中,由于平台姿态受到机构结构的限制,机构的运动空间和工作空间存在局限性。
为了解决这个问题,人们提出将冗余自由度引入并联机构中,能够扩展其运动自由度和工作空间,提高其性能和适用范围。
此外,在机构设计中驱动方式的选择也对机构性能和适用范围有着重要的影响。
因此,对冗余驱动并联机构的运动学分析和驱动优化进行研究,对于提高并联机构的性能和适用范围具有重要的理论意义和工程应用价值。
二、研究内容1.冗余驱动并联机构运动学分析:分析冗余驱动并联机构的运动学特性和数学模型,确定控制参数,分析驱动方式的影响,并建立数学模型。
2.冗余驱动并联机构驱动优化:研究冗余驱动并联机构的驱动方式和控制策略,优化驱动方案和参数,提高机构的性能和适用范围。
三、研究方法1.理论研究:分析冗余驱动并联机构的运动学特性和数学模型,确定控制参数,分析驱动方式的影响,并建立数学模型。
2.仿真模拟:通过ANSYS、ADAMS等仿真软件对冗余驱动并联机构进行模拟,模拟机构的运动学特性和运动轨迹,评估驱动方案和控制策略的优劣。
3.实验研究:设计并搭建具有冗余驱动的并联机构样机,进行实验研究,验证理论分析和仿真模拟结果,提高机构的性能和适用范围。
四、预期成果1. 建立冗余驱动并联机构的数学模型,分析控制参数和驱动方式对机构性能和适用范围的影响。
2.提出优化驱动方案和参数的方法和策略,提高机构的性能和适用范围。
3.设计搭建冗余驱动并联机构样机,验证理论分析和仿真模拟结果,提高机构的性能和适用范围。
五、研究价值本项目的研究成果能够对提高并联机构的性能和适用范围具有重要的理论意义和工程应用价值,能够推进并联机构在工程应用中的广泛使用。
具有冗余驱动的平面三自由度对称并联机器人机构[实用新型专利]
![具有冗余驱动的平面三自由度对称并联机器人机构[实用新型专利]](https://img.taocdn.com/s3/m/85695848b0717fd5370cdc84.png)
专利名称:具有冗余驱动的平面三自由度对称并联机器人机构专利类型:实用新型专利
发明人:王冰,李东阳,刘健,康会峰
申请号:CN201120389889.9
申请日:20111014
公开号:CN202292761U
公开日:
20120704
专利内容由知识产权出版社提供
摘要:本实用新型涉及一种具有冗余驱动的平面三自由度对称并联机器人机构,其特征是:运动平台通过四个相同的支链与固定平台相连接,固定平台的四个转动副呈正方形布置,运动平台的四个转动副也呈正方形布置,每个支链含两个连杆,两连杆间、连杆与固定平台及运动平台间都通过转动副连接。
当选取四个固定平台转动副作为机器人机构的四个输入,则运动平台具有三个自由度。
本实用新型具有结构和驱动分布对称、工作空间内无奇异位形、刚度大、承载能力强、容易制造和装配等优点。
申请人:北华航天工业学院
地址:065000 河北省廊坊市爱民东道133号
国籍:CN
更多信息请下载全文后查看。
3自由度Delta并联机构的特性分析与运动仿真

AbstractParallelrobothasmoreadvantagesthanserialrobots.3degreeoffreedomparallelrobotisanimportantpartinthefamilyofparallelrobot.DeltaParallelRobotwithitshighspeed,highrigidity,highprecision,hastheadvantagesoflargeworkingspace.Itisintheindustrial,medicalandotherfieldsareplayinganimportantrole.Itisalsoincreasinglysubjecttopeople’Sattention.Inthispaper,byusingthedeltarobotastheresearchobject,analysesitscharacteristicsandmotionparallelsimulation.Theresearchcontentmainlyincludesmechanismcharacteristicmatrix.workspace,motionreliability.Parallelmechanismconfigurationandvariouspartsofthemotoroutputarethebasiccharacteristicsoftheparallelmechanism.FirstIobtainabranched(SOCS)featurematrixoftheparallelmechanism.ThenIthroughthestudyofparalleltheorem,synthesisofthebranchedmotion,Igetthewholecharacteristicmatrixofparallelmechanism.Theworkspaceisanimportantstandardtomeasurethequalityofparallelrobot.ItiSalsoanimportantcharacteristicofparallelmechanism.Accordingtothehelixstructureofdeltaparallelmechanism,lsetupthespacecoordinatesystem.Therelationbetweeninputsandoutputs.IestablishtheconstraintequationsandtheJacobimatrix.1establishequationaccordingtotheinfluenceofdexterityofparallelmechanism.1makethesizeparametersofthemechanismiSbetter.Imakethesizeparametersofthemechanismisbetter.Igettheworkingspaceofparallelmechanismbysurfaceenvelopeprinciple.Istudyontheeffectofdifferentparameterstotheworkspace,fmdthemethodtOoptimizetheworkingspace.Sincetheoriginalerrorsofdifferentinstitutionshavedifferentsources.MotionreliabilityisanimportantcharacteristicofDeltaparallelmechanism.1setupthemechanismpositionerrorcontainsthedimensionerror,mechanismofrotatingiointclearanceerroranderrorcalculationmodel.Igetthemotionreliabilityofmechanism.MotionreliabilityanalysisiSameasureofthestandardMotionaccuracyofthemechanism,andmotionreliabilityanalysisisabasicofmechanismoptimizationdesignanderrorcompensation.Finally,lcarriedonthemovementsimulationoftheDeltaParallelmechanism.Iestablishedthemodelof3DmodelingsoftwarewithSolidWbrks.inaccordancewiththeanalysisonthemechanismofconfiguration.ThroughtheestablishmentofSolidW|orksinterfacewithMatlab/SimLink.1willentitymodelintotheparallelmechanisminMatlab.GetconnectionmoduleintheMatlab/SimlinktoolboxinSireMechanics.1wereaddedtoactivememberandthemovingplatformmoduleandsensor.Getwiththeforwardsolutionofparallelmechanismdirectly.Andthecorrectnessofverificationmechanismmotionoutput,workingspace,motionreliabilityanalysisonthemechanismofpositivesolution.Keywords:DeltaParallelmechanism;Characteristicmatrix;Workspace;MotionReliability河北工程大学硕士学位论文厂(s)=五万丽(4.11)应用矩法(数理统计中的算法)可以近似的求得f(S)的均值和方差并通过蒙特卡罗法【381(是一种计算机化的数学方法)确定总位置误差的分布。
三维平动并联机床的运动分析

度计 算公 式 _ 4 ] 。黄 真 等 用 螺 旋 理 论 重 新 定 义 公 共 约 束 ,
给 出阶 的计算 方法 , 从 而 确 定 机 构 的 自 由度 。
建 立 如 图 2所 示 的 分 支 坐 标 系 . 该 支 链 的 运 动 螺 旋 系为 :
1 机构 及 其 自 由度
收 稿 日期 : 2 0 1 3年 5月
近年来 。 由 于 并 联 机 器 人 相 对 于 串 联 机 器 人 具 有
刚度大、 精 度高 、 惯性小 、 负 载 大 及 动 力 学 性 能 好 等 优 点 。 在 工 业 生 产 及 其 它 领 域 有 着 广 泛 的 应 用 前 景 。 在
少 自 由度 并 联 机 构 中 . 三 自 由度 的 并 联 机 构 是 其 中 很 有 实 用 前 景 的 一 类 , 它 能 满 足 大 多 情 况 下 的 工 作 要
研 究 并 联 机 构 的 工作 空 间 。 利 用 S i mMe c h a n i c s 模 块 根 据 机 器人 的 结 构进 行 建 模 , 跟 踪 支链 末 端轨 迹 , 绘 制 并 计 算 并 联 机
构 的 工作 空 间 。 分析表明 , 该 机 床 具 有 工作 空 间 大 、 无 空 洞 以及 截 面形 状 规 则 等 优 点 , 适合长方体作业空间、 工 业搬 运 等 领
三 维 平 动 并 联 机 床 的 运 动 分 析
口 张 罪霏 口 吴洪 涛 口
南京
严
伟
1 . 南 京 航 空 航 天 大学 机 电学 院
2 1 0 0 1 6 2 2 5 0 0 0
2 . 扬 州 恒佳 机 械有 限公 司 江苏扬州
摘
三自由度Delta并联机器人的设计与仿真

目录摘要 (2)第1章引言 (6)1.1. 我国机器人研究现状 (8)1.2. 工业机器人概述: (9)1.3. 本论文研究的主要内容 (10)第2章机器人方案的设计 (15)2.1. 机器人机械设计的特点 (15)2.2. 与机器人有关的概念 (15)2.3. 工业机器人的组成及各部分关系概述 (16)2.4. 工业机器人的设计分析 (17)2.5. 方案设案 (18)2.6. 自由度分析 (18)2.7. 机械传动装置的选择 (20)2.7.1. 滚珠丝杠的选择 (20)第3章零部件设计与建模 (22)3.1. Croe软件介绍 (22)3.2. 关键零部件建模 (22)3.3. 各部分的装配关系 (36)第4章仿真分析 (39)第5章致谢 (43)参考文献 (44)摘要工业技术水平是工业用机器人现代化水平的重要指标,从研究和研究领域发展的结论,提高现代产业的要求,提高产业控制和控制任务的复杂性,提出了很高的要求。
理论上,我国末期输送能力和定位精确度高、小误差、惯性误差、反应速度快、工业工作并行、快速准确、现有工业工程预计会进一步增加,本文将研究并行研究、实用化并行以企业工学实用化为目标。
从摩擦接口、外乱和不确定性来看,如果没有连锁和动力学模型化的负担,传统的控制战略将难以得到基于控制有效性模型的预期。
通常,与一系列平行于更复杂的运动模型相比,动态测试和控制机制将更加复杂。
因此,有必要研究并联机构的动力学建模及其控制问题。
这是一个新的机器人,机器人的刚性。
承载能力高。
高精度。
小负荷的重量。
具有良好的性能和广泛的应用,是robotów.spokojnie系列的补充。
有一个固定的一部分,在特点和实验室条件下的动力学加速度(重力加速度),.终端控制机制,原来的三角洲是最有效的机制平行安装“电子项目机器人是机器人的控制和规划动力学研究的基础上,发挥着重要的作用,在“.badania kinematykę反向动力学和由简单到przodu.odwrotnie相对平行前进,kinematykę相对skomplikowane.na结构分析的基础上,建立了三角洲机器人模型,机器人的机器人。
基于大工作空间的三自由度并联机器人的机构研究
运 动副 等价替 换原理 、螺旋 理论 嘲分 析 了该 机 器人
的 自由度 、位置反 解和工 作空 间 。 1 菱形机构
图 1 多 菱 形连 接
根 据菱形 的几 何特 征 以及机 构 的概 念 ,可 以演 绎 出如 图 3所示 的菱 形机 构 。 根 据广义 运 动副 的概 念及机 构 的等价原 理 ,菱 形 机 构 的广义运 动 副如 图 4所 示 。
作 者 简 介 :陈 江 红 (9 2) 男 , 庆 人 , 读硕 士 研 究 生 , 要 研 究方 向为 并 联 机 器 人 结 构 设计 及 应用 。 18 一 , 重 在 主
2 1 第 1期 0 0年
陈 江红 ,等 :基 于 大 工 作 空 间 的 三 自 由度 并 联 机 器 人 的 机 构 研 究
中 图分 类 号 :T 2 2 P 4 文 献 标 识 码 :A
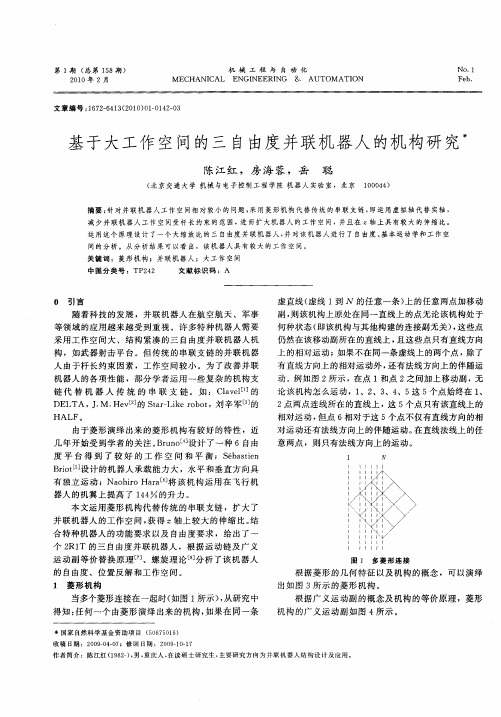
0 引 言
虚直线 ( 虚线 1到 Ⅳ 的任意一条 ) 上的 任意两点加移动 副 , 该机构上原处在 同一直线 上的点无论 该机构处 于 则 何种状 态 ( 即该机构 与其 他构建 的连 接副无关 ) 这些点 , 仍然在该 移动副所在 的直线 上 , 且这 些点只有直线方 向 上 的相对运 动 ; 如果 不在同一条虚线上 的两个点 , 了 除 有直线 方向上 的相对运 动外 , 有法线方 向上 的伴随运 还 动 。例如图 2 所示 ,在点 1 和点 2之间加上移 动副 , 无 论 该机构怎么运动 ,1 、3 、5这 5 、2 、4 个点始终 在 1 、 2点两点连线所在 的直线上 , 5个点只有该直线上 的 这 相对运 动 , 但点 6相对于这 5 个点不 仅有直线方 向的相 对运动还 有法线方 向上 的伴 随运动 。 在直线法线上的任 意两点 ,则 只有法线 方向上的运动 。
Delta系列并联机器人研究进展与现状

二、现状
目前,Delta系列并联机器人的研究主要集中在机构设计、运动学和动力学 分析、控制策略和实验研究等方面。在机构设计方面,研究人员通过对Delta机 器人的结构和运动特点进行分析和优化,提出了多种新型的Delta机器人机构。 在运动学和动力学分析方面,研究人员利用计算机进行模拟和仿真,对Delta机 器人的运动性能和动力学特性进行了深入探讨。
一、研究背景
并联机器人的研究可以追溯到20世纪60年代,当时美国科学家 J.C.Mckinstry提出了一种基于并联机构的机器人设计方法。到了20世纪90年代, 随着计算机技术和机械制造技术的不断发展,并联机器人的研究和应用开始受到 广泛。Delta系列并联机器人作为一种常见的并联机器人,具有高速度、高精度 和高效率等特点,因此在现代工业中得到了广泛应用。
在控制策略方面,研究人员采用各种先进的控制方法,如PID控制、鲁棒控 制和自适应控制等,以提高Delta机器人的控制精度和稳定性。在实验研究方面, 研究人员对Delta机器人的各种性能指标进行测试和评估,以验证其在实际应用 中的效果。
此外,Delta系列并联机器人还在许多领域得到了应用,如装配、搬运、包 装和检测等。由于Delta机器人具有高速度和高精度等特点,因此在生产线上可 以大大提高生产效率和产品质量。例如,在电子制造领域,Delta机器人可以快 速准确地装配和搬运电子部件,从而提高生产效率和质量。在食品包装领域, Delta机器人可以高效地包装各种食品,从而提高生产效率和市场竞争力。
此外,Delta机器人的成本较高,对于一些中小型企业来说,引入Delta机器 人可能会增加生产成本。最后,Delta机器人的应用领域还需要进一步拓展,以 适应更多的生产环境和生产需求。
四、展望
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Delta机构的冗余驱动三维平动并联机构研究
吕有界;欧哲铭;谭文才
【摘要】结合Delta机构的优缺点提出了一种新型的基于Delta机构的冗余驱动三维平动并联机构,该机构在成熟的Delta机构上增加X、Y方向两个平动自由度,从而在充分利用Delta机构高速高精度的特点的基础上,扩大机构的工作空间,扩大Delta机构在工业领域的应用范围,包括PCB插件、货物堆垛、3D打印等.通过样机初步试验表明该机构整体运动平稳,机构末端元件运动速度高,但在运动过程中出现了一定程度的振动,这在一定程度上影响机构末端元件运动精度.
【期刊名称】《机电工程技术》
【年(卷),期】2016(045)012
【总页数】3页(P31-32,46)
【关键词】Delta机构;冗余驱动;并联机构
【作者】吕有界;欧哲铭;谭文才
【作者单位】广州航海学院,广东广州 510725;广州航海学院,广东广州 510725;广州航海学院,广东广州 510725
【正文语种】中文
【中图分类】TH112
目前常见的工业机器人机构多为串联机构,由于此种机构是运动开链的,因而有诸如刚度小、承载能力差、误差积累大等缺点。
并联机器人因采用机械闭环的结构,使机器人运动部分的惯量降低、刚度提高,故较之串联机器人而言,具有定位精度
高、承载能力强等优点。
美国Clavel博士发明的Delta并联机构,可实现高速的
三维平动,具有结构简单、运动速度快、定位精度高等优点[1]。
但相对串联机构
来说,Delta并联机构存在工作空间小、结构尺寸偏大等缺点。
国内外学者对Delta机构的研究相对成熟,包括运动学分析[2]、动力学分析[3]、性能评估[4]、
奇异点分析[5]以及其控制[6]等。
目前,Delta并联机器人己经广泛应用于化妆品、食品和药品的包装和电子产品的装配[7]。
为了进一步提高Delta机构的工作空间,扩大其应用范围,本研究拟在水平X、Y方向增加两个平动自由度,形成高速高精度冗余驱动并联机构,进而为为工作空间大,只需平动的高速高精度工业机器人的研究提供基础。
冗余驱动三维平动自由度并联机构[8]主要由直角坐标轴进给装置1、支架2、Delta机构3三大部分组成,如图1所示。
其中直角坐标轴进给装置由第一移动电机4、第二移动电机15、第一联轴器19、第二联轴器16、第一滚珠丝杠螺母副7、第二滚珠丝杠螺母副9、第一前轴承座12、第一后轴承座5、第二前轴承座8、第二后轴承座17、第一固定导轨副18、第二固定导轨副10、第一移动导轨副6、
第二移动导轨副13、导轨固定板11以及支座14组成。
Delta机构参照文献[2]进行设计,支架由标准铝材结构通过螺栓连接而成。
在具体连接方式方面,第一固定导轨副18、第二固定导轨副10通过螺栓与支架2连接;所述第二移动电机15与第二滚珠丝杠螺母副9通过第二联轴器16连接,
并固定在支架2上;所述第一移动导轨副6、第二移动导轨副13通过螺栓与导轨固定板11连接;所述第一移动电机4与第一滚珠丝杠螺母副7通过第一联轴器
19连接,并固定在导轨固定板11的端部。
而整个Delta机构通过连接装置与直
角坐标轴进给装置上的第一滚珠丝杠螺母副7连接,从而实现整个Delta机构在XY方向的整体平动。
冗余驱动三维平动自由度并联机构电气控制系统如图3所示。
直角坐标轴进给装
置采用的是步进电机,使用PLC作为控制单元;而DELTA机构是采用的是伺服电机,通过运动控制卡进行监控。
为了使两种控制单元之间的联系更紧密,便于监控,使用一台工业控制机作为上位机,将PLC和运动控制卡集成到一个软件系统中。
PLC编程口直接与工控机的232接口连接,利用MSCOMM串口通信控件,实现了上位机对PLC的实时监控。
运动控制卡插在工控机主板上的PCI插槽中,通过gts函数库[6]实现对伺服电机的实时监控。
在整个机构轨迹规划采用超椭圆轨迹规划算法与直线规划算法。
通过设计与改进,试制了一台冗余驱动三维平动自由度并联机构样机。
通过参数设置与调试,并充分考虑机器的安全性与性能稳定性。
在直线轨迹模式下85%的速
度运行,末端元件以直线轨迹规划算法方式下按照如图4所示的轨迹循环一次所
需时间为2 153 ms,表明机构运动速度快。
另观察运动过程,机构在运动过程中出现一定振动,这需在以后的研究中进一步改进。