冗余并联机构运动学性能分析与优化
并联机构动力学分析及其优化研究
并联机构动力学分析及其优化研究近年来,伴随着机器人技术的飞速发展,各类新型机构不断涌现。
其中,由多个可移动机构组成的并联机构具有极高的灵活性和智能性,被广泛应用于生产制造、军事打击、环境探测等领域。
然而,并联机构在运动控制和优化设计方面仍然面临着一些挑战。
本文将探讨并联机构动力学分析及其优化研究的最新进展和未来方向。
1. 并联机构动力学分析并联机构是由多个移动连杆和联接件构成的机制系统,可实现多自由度的运动。
由于并联机构的微小误差和噪声传递对系统性能的影响较大,因此需进行精确的动力学分析。
目前,主要的动力学分析方法包括正解法、逆解法和拉格朗日方程法。
正解法是根据机构几何特征,通过数学公式计算出位置、速度和加速度等量之间的关系,从而求出力学量。
此方法引入了几何分析、微积分、向量运算等知识,计算步骤较为繁琐,但计算结果精度较高,适用于较简单的并联机构。
逆解法是利用运动学基本定理,根据系统所给定末端执行器的位置、速度和加速度,逐步反推出各个连杆的角位移、角速度和角加速度,进而求出力学量。
逆解法直接从问题的求解出发,计算速度较快,适用于较复杂的并联机构。
拉格朗日方程法是基于能量守恒原理的一种动力学分析方法。
该方法是利用拉格朗日函数,将机构运动方程表述为一组含有相应广义坐标、速度和加速度的常微分方程组。
此方法可适用于高自由度的机构,并具有较强的表达能力和灵活性。
2. 并联机构优化研究并联机构优化设计是指通过调整机构的构型、参数或控制策略,以实现机构在特定工作条件下的最优性能。
目前,主要的优化设计方法包括结构优化、参数优化和控制优化。
结构优化是通过改变机构整体结构或连接方式,以达到优化指标的目的。
常用的方法包括遗传算法、神经网络和模拟退火算法等,主要用于寻找机构的最优拓扑结构。
参数优化是在保持机构结构不变的前提下,调整机构参数以达到最优性能。
常用方法包括非线性规划、遗传算法和粒子群算法等,主要用于寻找机构参数的最优值。
冗余驱动并联机构运动学分析与驱动优化研究的开题报告

冗余驱动并联机构运动学分析与驱动优化研究的开题报告题目:冗余驱动并联机构运动学分析与驱动优化研究一、研究背景并联机构是一种重要的机构形式,具有很多优点,如结构简单、负载能力高、刚度大等。
但在实际工程应用中,由于平台姿态受到机构结构的限制,机构的运动空间和工作空间存在局限性。
为了解决这个问题,人们提出将冗余自由度引入并联机构中,能够扩展其运动自由度和工作空间,提高其性能和适用范围。
此外,在机构设计中驱动方式的选择也对机构性能和适用范围有着重要的影响。
因此,对冗余驱动并联机构的运动学分析和驱动优化进行研究,对于提高并联机构的性能和适用范围具有重要的理论意义和工程应用价值。
二、研究内容1.冗余驱动并联机构运动学分析:分析冗余驱动并联机构的运动学特性和数学模型,确定控制参数,分析驱动方式的影响,并建立数学模型。
2.冗余驱动并联机构驱动优化:研究冗余驱动并联机构的驱动方式和控制策略,优化驱动方案和参数,提高机构的性能和适用范围。
三、研究方法1.理论研究:分析冗余驱动并联机构的运动学特性和数学模型,确定控制参数,分析驱动方式的影响,并建立数学模型。
2.仿真模拟:通过ANSYS、ADAMS等仿真软件对冗余驱动并联机构进行模拟,模拟机构的运动学特性和运动轨迹,评估驱动方案和控制策略的优劣。
3.实验研究:设计并搭建具有冗余驱动的并联机构样机,进行实验研究,验证理论分析和仿真模拟结果,提高机构的性能和适用范围。
四、预期成果1. 建立冗余驱动并联机构的数学模型,分析控制参数和驱动方式对机构性能和适用范围的影响。
2.提出优化驱动方案和参数的方法和策略,提高机构的性能和适用范围。
3.设计搭建冗余驱动并联机构样机,验证理论分析和仿真模拟结果,提高机构的性能和适用范围。
五、研究价值本项目的研究成果能够对提高并联机构的性能和适用范围具有重要的理论意义和工程应用价值,能够推进并联机构在工程应用中的广泛使用。
《一种共轴混联机构运动学性能指标分析与仿真》范文
《一种共轴混联机构运动学性能指标分析与仿真》篇一一、引言随着现代机械系统的复杂性和功能需求的不断提升,共轴混联机构作为一种新型的机械结构,其灵活性和高效性受到了广泛关注。
共轴混联机构在机器人、航空航天、精密制造等领域有着广泛的应用前景。
因此,对共轴混联机构的运动学性能指标进行分析和仿真研究具有重要的理论意义和实际应用价值。
本文旨在通过对一种共轴混联机构进行运动学性能指标的分析与仿真,为该类机构的设计和优化提供理论依据。
二、共轴混联机构概述共轴混联机构是一种新型的机械结构,其特点在于多个驱动器共同驱动同一轴线上的多个构件进行运动。
这种机构具有结构紧凑、运动灵活、承载能力强等优点,因此在机器人、航空航天、精密制造等领域得到了广泛应用。
本文以一种典型的共轴混联机构为研究对象,对其运动学性能指标进行分析和仿真。
三、共轴混联机构运动学性能指标分析(一)运动学模型建立首先,建立共轴混联机构的运动学模型。
通过分析机构的构型、构件间的约束关系以及驱动器的驱动方式,确定机构的输入参数和输出参数。
在此基础上,建立机构的运动学方程,描述机构的运动规律。
(二)运动学性能指标定义根据共轴混联机构的运动学模型,定义一系列运动学性能指标。
主要包括:机构的运动范围、运动精度、运动速度、运动平稳性等。
这些指标将用于评估机构的运动学性能。
(三)运动学性能指标分析针对共轴混联机构的运动学性能指标进行详细分析。
通过分析机构的构型、驱动器的驱动方式以及构件间的约束关系等因素对机构运动学性能的影响,得出机构的优势和不足。
同时,通过仿真实验验证理论分析的正确性。
四、共轴混联机构仿真研究(一)仿真环境搭建利用仿真软件搭建共轴混联机构的仿真环境。
根据机构的构型、构件尺寸、驱动器参数等信息,建立机构的仿真模型。
同时,设置仿真参数,如仿真时间、仿真步长等。
(二)仿真实验设计设计一系列仿真实验,对共轴混联机构的运动学性能进行测试。
通过改变驱动器的输入参数,观察机构的输出参数变化,评估机构的运动范围、运动精度、运动速度、运动平稳性等性能指标。
一种冗余约束并联机构运动学分析

何法与反变换法相结合的方法对一种模块化的六自由度串联机
器人进行了运动学分析并成功求解出了该串联机器人的逆运动
学解析解遥 相对于数值求解方法袁由封闭解法求出的解析解精度
高尧 求解速度快袁 所以封闭解法是机器人运动学求解的常用方
法袁 只有在无法求出解析解的情况下才会采用数值方法对机器
人进行运动学分析遥
针对并联机构的运动学分析袁其难点在于正运动学求解遥 本
38
一种冗余约束并联机构运动学分析
一种冗余约束并联机构运动学分析
运蚤灶藻皂葬贼蚤糟泽 粤灶葬造赠泽蚤泽 燥枣 葬 砸藻凿怎灶凿葬灶贼 悦燥灶泽贼则葬蚤灶藻凿 孕葬则葬造造藻造 酝藻糟澡葬灶蚤泽皂
沈南燕 禹 壮 李 静 叶 飞 耿 亮 王梓睿
渊上海大学上海市智能制造及机器人重点实验室袁上海 圆园园源源源冤
由上述并联机构的结构约束条件可知院
则员 越则圆 越怎员圆 越怎圆圆 越咱怎曾 怎赠 怎扎 暂
扇缮设怎员员 越怎圆员 越咱园 员 园暂
渊员冤
墒设则猿 越咱园 员 园暂
怎员员窑怎员圆 越园
渊圆冤
粤员 月员窑则员 越园
渊猿冤
粤猿 月猿窑则猿 越园
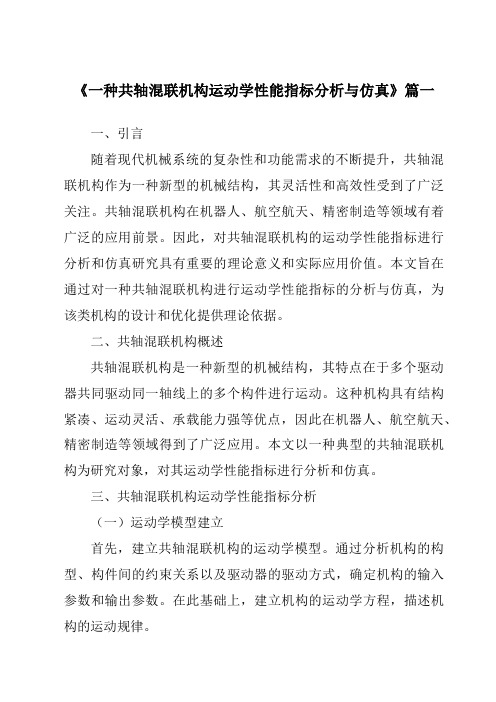
如 图 员 所 示 袁月员尧 月圆尧月猿 分别是支链 员尧支 链 圆尧 支链 猿 三根直动
链与定平台连接副的中
心 点 袁月 为 月员月圆 的 中 点遥 粤员尧粤圆尧粤猿 分别是该 三根直动链与动平台连
接 副 的 中 心 点 关节变量 择蚤渊蚤越员噎猿冤 分 别 为 粤员月员尧粤圆月圆尧粤猿月猿 的 长 度 遥 吟粤员粤圆粤猿 和
图 员 并联机构结构简图
吟月员月圆月猿 为等腰三角形袁其中 月员月猿越月圆月猿袁粤员粤猿越粤圆粤猿遥 月月圆尧月月猿尧 粤粤圆尧粤粤猿 的长度分别为 遭员尧遭圆尧葬员尧葬圆遥 分别在定平台和动平台上 建立坐标系 月原曾赠扎 和 粤原怎增憎袁 其中坐标系 月原曾赠扎 的 曾 轴方向 为 月 指向 月猿袁赠 轴方向为 月 指向 月圆曰坐标系 粤原怎增憎 的 怎 轴方向 为 粤 指向 粤猿袁增 轴方向为 粤 指向 粤圆遥 并且向量 怎员员 和 怎圆员 的方向 分别与支链 员 和支链 圆 的虎克铰的第二个旋转关节的轴线平行袁 向量 则员尧则圆尧则猿 的方向分别与支链 员尧支链 圆尧支链 猿 的旋转副的旋 转轴线平行遥 由库兹贝奇准则可得袁该并联机构有一个自由度袁但 由于其存在两个冗余约束袁所以该并联机构的自由度数为 猿遥 圆 运动学分析 圆援员 并联机构逆运动学分析
串联和并联机器人运动学与动力学分析
串联和并联机器人运动学与动力学分析串联和并联机器人是工业自动化领域中常见的机器人结构形式。
它们在不同的应用场合中有着各自的优势和适用性,因此对它们的运动学和动力学进行深入分析具有重要意义。
本文将从运动学和动力学两个方面对串联和并联机器人进行分析,并对它们的特点和应用进行了介绍。
一、串联机器人的运动学和动力学分析1. 串联机器人的运动学分析串联机器人是由多个运动副依次连接而成的,每个运动副只能提供一个自由度。
其运动学分析主要包括碰撞检测、正解和逆解三个方面。
(1)碰撞检测:串联机器人在进行路径规划时,需要考虑各个运动副之间的碰撞问题。
通过对关节位置和机构结构进行综合分析,可以有效避免机器人在工作过程中发生碰撞。
(2)正解:正解是指已知各关节的角度和长度,求解末端执行器的位姿和运动学参数。
常见的求解方法包括解析法和数值法。
解析法适用于关节均为旋转副或平动副的情况,而数值法则对于复杂的几何结构有较好的适应性。
(3)逆解:逆解是指已知末端执行器的位姿和运动学参数,求解各关节的角度和长度。
逆解问题通常较为困难,需要借助优化算法或数值方法进行求解。
2. 串联机器人的动力学分析串联机器人的动力学分析主要研究机器人工作时所受到的力、力矩和加速度等动力学特性,以及与机器人运动相关的惯性、摩擦和补偿等因素。
其目的是分析机器人的动态响应和控制系统的设计。
(1)力学模型:通过建立机器人的力学模型,可以描述机器人在工作过程中的动力学特性。
常用的建模方法包括拉格朗日方程法、牛顿欧拉法等。
(2)动力学参数辨识:通过实验或仿真,获取机器人动力学参数的数值,包括质量、惯性矩阵、摩擦矩阵等。
这些参数对于后续的控制系统设计和性能优化非常关键。
(3)动力学控制:基于建立的动力学模型和参数,设计合适的控制算法实现对机器人的动力学控制。
其中,常用的控制方法包括PD控制、模型预测控制等。
二、并联机器人的运动学和动力学分析1. 并联机器人的运动学分析并联机器人是由多个执行机构同时作用于末端执行器,具有较高的刚度和负载能力。
含恰约束支链的冗余驱动并联机构性能分析
含恰约束支链的冗余驱动并联机构性能分析张海强;房海蓉【摘要】This paper presents a novel 1T2R three-degree of freedom (DOF) redundantly actuated 4-PUS-UP parallel manipulator with suitable constraint branch that can be employed to high-speed milling for large heterogeneous complex structural component in aerospace field.Firstly,the inverse kinematics of the parallel manipulator is carried out,and driving and constraint Jacobian matrix are established respectively,and then the homogeneous dimensional Jacobain matrix is obtained.Secondly,the condition number,motion/force transmission performance and stiffness index are involved.Through some numerical examples,atlas of the performance indices between 3-PUS-UP and redundantly actuated parallel manipulator are depicted,and the global performance index are calculated.The results show that the proposed manipulator in this paper has more superior kinematic performance than the 3-PUS-UP parallel manipulator and the former owns good prospect in engineering application.%针对航空航天领域大型异构件复杂曲面的高速铣削加工的任务要求,提出了一种新型1T2R的三自由度含恰约束支链的冗余驱动4-PUS-UP并联机构.对并联机构进行运动学位置逆解,求该机构的驱动雅可比矩阵和约束雅可比矩阵,进而构建量纲一致的雅可比矩阵.引入条件数、运动/力传递性能和刚度性能评价指标.通过算例绘制3-PUS-UP并联机构和该冗余驱动并联机构的性能分布图,并计算全域性能指标.结果表明:该冗余驱动并联机构的运动学性能优于3-PUS-UP并联机构,具有更好的工程应用前景.【期刊名称】《北京交通大学学报》【年(卷),期】2018(042)001【总页数】6页(P133-138)【关键词】并联机构;雅可比矩阵;条件数;运动/力传递性能;刚度【作者】张海强;房海蓉【作者单位】北京交通大学机械与电子控制工程学院,北京100044;北京交通大学机械与电子控制工程学院,北京100044【正文语种】中文【中图分类】TH112空间少自由度尤其是1T2R三自由度并联机构作为高端智能装备的主机构,已广泛应用于航空航天和汽车等领域异型机构件的等厚加工及航空铝结构件的装配等作业中,典型的机构有Print Z3主轴头[1],Tricept和Exechon混联机床[2-3]等.为保证并联机构能完成复杂加工任务,通常使主驱动数目大于实际任务所需自由度.而冗余驱动不改变机构的运动自由度,却能有效提高并联机构的承载能力和运动特性[4].在工程应用中,为了增大1T2R三自由度并联机构的工作空间,可以串接大的移动行程导轨,同时,为了提高执行器末端的姿态调整能力,可以串接2~3自由度回转头,进而构成多自由度的大工作空间混联机构,可以用作加工机床.近年来,以1T2R为代表的混联机床受到学术界和工业界的广泛关注,研究热点主要集中在构型综合、运动学和动力学性能分析及尺度综合等方面.在并联机构的构型综合中,存在一类由恰约束从动支链和无约束主动支链组成的机构,如Tricept机构[5].根据支链对动平台提供的约束和驱动作用不同,可以将支链分为无约束主动支链、恰约束从动支链、欠约束主动支链和恰约束主动支链[6].文献[7]采用虚链机构法将两转一移并联机构归结为UP类、PU类、RPR类和P*U*类,并对研究进展做了综述分析.文献[8]针对1T2R的三自由度并联机构3-PUS-PU进行运动学位置分析,建立工作空间,分析可操作度、灵巧性和刚度指标,并进行多目标优化设计.文献[9]对含恰约束UP支链的三自由度3-PUS-UP并联机构进行运动灵巧性和刚度性能分析.文献[10]指出,并联机构性能分析主要使用速度雅可比矩阵的行列式、条件数、奇异值等代数特征值,但鉴于转移耦合机构无法直接使用其特征值,需先对其进行量纲归一处理.文献[11]基于螺旋理论,采用瞬时功率与最大传递功率之比作为评价机构运动/力特性优劣的重要指标,该方法可以避免转移耦合量纲不一致问题.本文作者针对新型冗余驱动4-PUS-UP并联机构,进行运动学位置逆解分析,建立量纲统一的雅可比矩阵;并引入条件数、运动/力传递指标和刚度指标,建立其局部指标和表征机构性能的全局指标,通过数值算例,分析4-PUS-UP与3-PUS-UP运动学性能.1 机构描述与坐标系建立为了提高机构的运动学性能,本文作者提出一种新型冗余驱动4-PUS-UP并联机构,该机构是在3-PUS-UP并联机构(图1)的基础上改进而得,见图2.该机构通过4条相同的无约束主动支链PUS和一条恰约束从动支链UP连接静、动平台.PUS支链对动平台无约束,而中间支链UP使动平台只能绕虎克铰两轴转动和沿P滑轨方向的移动.图1 3-PUS-UP混联机床Fig.1 A hybrid kinematic machine of 3-PUS-UP图2 冗余驱动4-PUS-UP并联机构简图Fig.2 Schematic diagram of the redundantly actuated 4-PUS-UP parallel manipulator建立如图2所示的固定坐标系B-xyz和运动坐标系A-uvw.第i(i=1~4)支链上与动平台相连的球铰中心为Ai,与驱动副相连的虎克铰的中心为Ci.静平台B1B2B3B4和动平台A1A2A3A4都为正方向,点B为转平台的中心,x轴由B点指向B1,y轴由B点指向B2,z轴方向竖直向下.类似,点A为动平台的中心,适于安装刀具,u轴由A点指向A1,v轴由A点指向A2,w轴由右手定则给定.P表示主动驱动副,U表示胡克铰,S表示球铰.2 并联机构运动学分析2.1 位置逆解运动学位置逆解的关键是根据几何特征建立约束方程.设静动平台的外接圆半径分别为rb和ra.铰点Ai和Bi在B-xyz下的位置矢量分别为ai和bi,R表示A-uvw 相对于B-xyz旋转矩阵,见表1.表1 运动副铰点位置矢量Tab.1 Position vector of kinematic joints表达式物理意义r=[x,y,z]TA点相对于B⁃xyz的矢量bi=rb[cφisφi0]TBi在B⁃xyz下的位置矢量rpai=ra[cφisφi0]T+rAi在A⁃xyz下的位置矢量ai=RpaiAi在A⁃xyz下的位置矢量sio=-cφicα-sφicαsα[]T主驱动副的移动方向向量式中:φi表示铰点Ai、Bi与坐标系中心点连线与x轴的夹角,c表示余弦,s表示正弦.AiBi矢量在B-xyz中表示为Li=ai+r-bi=lili0+sisi0(1)式(1)两边平方,整理可得(2)对式(2)求解关于si的方程,可得驱动副的位移(3)2.2 雅可比矩阵的建立依据螺旋理论,由i(i=1,2,3,4)条支链所产生的瞬时速度可以表示成θ3,i$3,i+θ1,i$4,i+θ5,i$5,i+θ6,i$6,i(4)式中: ω和υ分别为动平台的角速度和线速度; θj,i表示第i条支链中第j(j=1,2,3,4,5,6)个R副的角速度表示P副的线速率.各支链中关节的运动螺旋为(5)式中,li=lili0.如果将第i(i=1,2, 3, 4)条支链的移动副锁定,那么就可以得到该支链的1个反螺旋,即(6)式中:为过球副中心,且平行于li0的单位螺旋.对式(6)与式(4)求互易积,可得(7)(8)式中:Jx=T.则该并联机构的运动子矩阵为Jp=Jt-1·Jx(9)2.3 UP支链雅可比矩阵的建立中间UP支链采用D-H法建立雅可比矩阵,坐标系建立见图2,关节参数见表2[9].表2恰约束支链的D-H参数Tab.2 D-H parameters of the constraint branchiθi/(°)diaiαi/(°)090h0901θ100902θ200030d300式中: θ1和θ2为虎克铰两相交轴线的转角; d3为支链沿滑轨方向的移动距离; h 为两定平台间距离,且h=tan α(rb-rc).由表2可得从B-xyz到A-uvw的齐次坐标变换矩阵(10)其中:联立表(1)和式(10),可以得到(11)对于UP支链速度映射关系表示为(12)式中:则UP支链的速度雅可比矩阵为(13)利用驱动矩阵和约束矩阵的关系,将量纲做归一化处理,可得(14)其中联立式(9)和式(14),可得该机构量纲统一的秩为3的完整雅可比矩阵J=JpJq(15)3 并联机构性能评价3.1 条件数式(15)的量纲是统一的,因此,可以利用J的条件数作为评价该机构局部运动性能的指标,即(16)式中σmax和σmin为J的最大、最小奇异值.鉴于k随机构位形的改变而不同,故可采用均值作为衡量机构的全域指标[12-13],即(17)式中W=∭dxdydz为任务工作空间.3.2 运动/力传递性能指标采用提出传递指标(Transmission Index,TI)[14-15],定义瞬时功率和潜在最大功率的比值为支链输入传递性能,即(18)式中: $Ii为第i个支链的关节驱动力(Input Twist Screw, ITS);$Ti为第i个支链的传递力螺旋(Transmission Wrench Screw, TWS).由于驱动关节为移动副,所以$Ii=$1i,锁住驱动关节,对运动螺旋求解力螺旋同时,定义最小值作为局部输入传递指标(Local Transmission Index, LTI),用于评价该机构的运动/力传递特性.则式(18)化简为(19)式中:α为运动螺旋方向与力螺旋方向的夹角.类比条件数,文献[16]对虚拟系数进行了修订,提出了全域运动/力传递性能指标(20)3.3 刚度指标采用虚拟关节法建立该机构的刚度模型,为了简化运算,忽略结构的柔性和外力的影响,则刚度矩阵为(21)式中:为关节空间的刚度矩阵.将K对角线元素的均值作为刚度的性能评价指标[17],即s=E(tr(K))(22)同理,将刚度指标的全域均值作为评估机构刚度性能的指标,即(23)4 算例分析设该冗余并联机构结构参数如下:静平台半径rb=750 mm,动平台半径ra=250 mm,定长杆l=700 mm,α=45°,工作空间的搜索范围为-300≤x≤300,-300≤y≤300,450≤z≤1 000,利用x=ρcθ,y=ρsθ,在柱坐标下绘制图形.4.1 条件数分析图3示出了动平台在不同高度下条件数的分布.机构在z方向移动越小,机构的条件数越接近于1,说明机构的运动性能越好,越接近边缘,条件数越大,说明机构性能越差.从图3看出3-PUS-UP条件数呈现轴对称分布,4-PUS-UP的条件数呈现中心对称分布,而且在相同的位置下,冗余驱动4-PUS-UP并联机构的条件数略微小于3-PUS-UP.图3 并联机构的机构条件数分布Fig.3 Condition index distribution of the parallel manipulators4.2 运动/力传递性能分析图4示出3-PUS-UP机构和4-PUS-UP在z=800下,局部运动/力传递指标的等值线分布,λ的值接近于1,说明机构的运动/力传递性能越好,而且冗余驱动4-PUS-UP机构最优质工作空间的面积明显大于3-PUS-UP机构,说明冗余驱动4-PUS-UP并联机构的运动/力传递性能优于3-PUS-UP.图4 并联机构LTI分布Fig.4 Local LTI index of parallel manipulators4.3 刚度分析图5示出3-PUS-UP机构和该冗余驱动并联机构在相同高度下刚度指标的分布.从图5中可以看出,在相同位置下,4-PUS-UP并联机构的刚度明显大于传统3-PUS-UP.表3示出了4-PUS-UP和3-PUS-UP并联机构的全域评价指标计算结果. 图5 并联机构的刚度分布Fig.5 Stiffness index distribution of parallel manipulators表3 两种机构的全域指标Tab.3 Global indexes of two manipulators机构kλs×1044⁃PUS⁃UP1.31330.95427.3163⁃PUS⁃UP1.34660.94705.497 由表3可知,4-PUS-UP并联机构的略高于3-PUS-UP并联机构,而略低于3-PUS-UP并联机构,说明4-PUS-UP并联机构的全域性能优于3-PUS-UP并联机构.5 结论1)提出了一种新型含恰约束支链的冗余驱动4-PUS-UP并联机构,对其进行位置逆解和运动学数学建模分析.2)基于条件数、运动/力传递性能、刚度性能,建立该并联机构的性能评价数学模型,进行数学算例分析,结果表明:4-PUS-UP的运动学性能(条件数、运动/力传递特性和刚度性能)优于3-PUS-UP并联机构,具有较好的工程实用前景.3)冗余支链的引入可以改善3-PUS-UP并联机构的运动学性能,为后期的优化设计提供理论基础.参考文献(References):[1] CHEN X, LIU X, XIE F, et al. A comparison study on motion/force transmissibility of two typical 3-DOF parallel manipulators: the Sprint Z3 and A3 tool heads[J]. International Journal of Advanced Robotic Systems,2014,11:1-11.[2] WANGY, LIU H, HUANG T. Stiffness modeling of the tricept robot using the overall Jacobian matrix[J].Journal of Mechanism andRobotics,2009,1(2):1-8.[3] ZHANG J, ZHAO Y, JIN Y. Elastodynamic modeling and analysis for an exechon parallel kinematic machine[J]. Journal of Manufacturing Science and Engineering, 2016,138(3): 1-14.[4] 董成林,刘海涛,黄田. 含冗余驱动支链4-UPS&UP并联机构的运动学性能分析[J]. 机械工程学报, 2016,52(5): 124-129.DONG Chenglin, LIU Haitao,HUANG Tian. Kinematic performance analysis of redundantly actuated 4-UPS & UP parallel manipulator[J].Journal of Mechanical Engineering, 2016,52(5): 124-129. (in Chinese)[5] 王友渔,黄田,Chetwynd D G,等.Tricept机械手静刚度解析模型建模方法[J].机械工程学报,2008,44(8):13-19.WANG Youyu, HUANG Tian, CHETWYND D G,et al. Analytical method for stiffness modeling of the tricept robot[J]. Journal of Mechanical Engineering,2008,44(8):13-19.(in Chinese)[6] 黄田,李曚,吴孟丽,等.可重构PKM模块的选型原则-理论与实践[J].机械工程学报,2005,41(8):36-41.HUANG Tian, LI Meng, WU Mengli,et al.Criteria for conceptual design of reconfigurable PKM modules-theory and application[J]. Journal of Mechanical Engineering, 2005,41(8):36-41.(in Chinese)[7] 李秦川, 柴馨雪, 陈巧红. 两转一移三自由度并联机构研究进展[J]. 科学通报, 2017,14:1507-1519.LI Qinchuan, CHAI Xinxue, CHEN Qiaohong. Review on 2R1T 3-DOF parallel mechanisms[J].2017,41:1507-1519 .(in Chinese)[8] ZHANG D, GAO Z, SU X, et al. A comparison study of three degree offreedom parallel robotic machine tools with/without actuation redundancy[J].International Journal of Computer Integrated Manufacturing, 2012,25(3): 230-247.[9] 崔国华,张海强,徐丰,等.空间3-PUS-UP并联机构运动灵巧性与刚度性能研究[J].农业机械学报, 2014,45(12):348-354.CUI Guohua, ZHANG Haiqiang, XU Feng,et al.Kinematic dexterity and stiffness performance of spatial 3-PUS-UP parallel manipulator[J]. Transactions of Chinese Society for AgriculturalMachinery,2014,45(12):348-354.(in Chinese)[10] MERLET J P. Jacobian, manipulability, condition number and accuracy of parallel robots[J]. Journal of Mechanical Design,2006,128(1):199-206. [11] 陈祥, 谢福贵,刘辛军.并联机构中运动/力传递功率最大值的评价[J]. 机械工程学报, 2014,50(3): 1-9.CHEN Xiang, XIE Fugui, LIU Xinjun. Evaluation of the maximum value of motion/force transmission power in parallel manipualtors[J]. Journal of Mechanical Engineering, 2014,50(3): 1-9. (in Chinese)[12] GOSSELIN C M, ANGELES J. A global performance index for the kinematic optimization of robotic manipulators[J].Journal of Mechanical Design,1991,113(3):220-226.[13] 黄冠宇,方跃法,曲海波,等. 基于遗传算法的五杆机构运动性能优化[J]. 北京交通大学学报,2015,39(4):44-48.HUANG Guanyu, FANG Yuefa, QU Haibo,et al. Optimization of the motion performance of planar five bar linkage using a generatic algorithm[J]. Journal of Beijing Jiaotong University,2015,39(4):44-48. (in Chinese)[14] WANG J, WU C, LIU X. Performance evaluation of parallel manipulators: motion/force transmissibility and its index[J]. Mechanism and Machine Theory,2010,45(10):1462-1476.[15] XIE F, LIU X, WANG J. Performance evaluation of redundant parallel manipulators assimilating motion/force transmissibility[J]. International Journal of Advanced Robotic System,2011,8(5):113-124.[16] CHEN C, JORGE A. Generalized transmission index and transmission quality for spatial linkages[J].Mechanism and MachineTherory,2007,42:1225-1237.[17] GAO Z, ZHANG D, HU X, et al. Design, analysis, and stiffness optimization of a three degree of freedom parallel manipulator[J]. Robotica, 2010,28(3): 349-357.。
一种冗余约束并联机构模态分析
沈南燕等:一种冗余约束并联机构模态分析
25
零部件的计算模态。然后为了验证求解的计算模态 参数的正确性,采用基于 LMS的实验模态分析方 法,求解其实验模态参数,并与基于 ANSYS求解的 计算模态参数形成对照,验证了 ANSYS计算模态分 析的有效性。同时上述研究为并联机构在设计加工 中的应用提供了理论指导。 1 基于 ANSYS的计算模态分析
LMS的实验模态分析。基于 ANSYS的计算模态分 析是通过有限元方法获取机构的各阶模态参数,并 把机构的模态振型以可视化的形式展示出来。基于 LMS的实现 模 态 分 析 是 通 过 施 加 给 机 构 一 个 激 励 信号,并通过传感器获取机构的振动响应信号,从而 获取其各项模态参数。通常情况下,机构的模态分 析是对其进行实验模态分析。
24
《计量与测试技术》2019年第 46卷第 6期
一种冗余约束并联机构模态分析
沈南燕 禹 壮 李 静(通讯作者) 叶 飞 耿 亮 王梓睿
(上海大学 上海市智能制造及机器人重点实验室,上海 200444)
摘 要:本文从并联机构在实际应用中的动力学性能出发,为了分析其主要部件的各阶固有频率,本文首先基于 ANSYS有限元分析方法对并 联机构及其重要零部件进行了模态分析,然后基于 LMS的实验方法对并联机构的主要零部件模态进行测试,最后通过对两种方法获取的一阶 固有频率的对比,验证了 ANSYS有限元分析方法求解计算模态的有效性。其中基于 ANSYS有限元分析方法的计算模态求解讨论了并联机构 的动力学性能,基于 LMS的实验模态测试与基于 ANSYS的计算模态测试形成对照。通过上述研究为并联机构结构参数的优化设计提供了理 论依据,并为其在实际应用中避免共振现象提供了理论指导。 关键词:并联机构;ANSYS计算模态;LMS实验模态 中图分类号:TB9 文献标识码:A 国家标准学科分类代码:41055 DOI:10.15988/j.cnki.1004-6941.2019.6.008
并联机构及其应用

并联机构可以用于卫星姿态的调整, 实现卫星的快速、准确姿态控制。
医疗康复领域
手术机器人
并联机构可以用于手术机器人,实现微创手术的高精度操作。
康复设备
并联机构可以用于康复设备,帮助患者进行精准的康复训练。
军事装备领域
无人驾驶车辆
并联机构可以用于无人驾驶车辆,实现快速、准确的移动和定位。
稳定性好、可靠性高
并联机构具有较好的稳定性和可靠性, 适用于对稳定性要求较高的场合。
易于实现模块化和标准化
并联机构可以通过模块化的设计和标 准化的制造,实现快速组装和互换, 方便维修和替换。
并联机构的发展历程
起源
并联机构最早起源于机械加工领 域,用于实现高精度定位和加工。
应用拓展
随着技术的发展,并联机构逐渐拓 展到其他领域,如机器人、航空航 天、医疗器械等。
助中风或脊髓损伤患者进行康复训练。
军事装备案例
军事装备案例
并联机构在军事领域的应用主要涉及无人驾驶车辆、无人机和火炮等装备的设计和制造。 由于并联机构具有高精度和快速响应等特点,它们在执行军事任务时具有显著优势。
具体应用
无人驾驶车辆的导航和地形识别、无人机的飞行控制和火炮的快速瞄准等任务,都离不 开并联机构的精确控制。此外,并联机构还可以用于制造高精度的军事装备部件,如导
创新发展
近年来,随着新型材料、智能控制 等技术的不断发展,并联机构在结 构创新、驱动方式、控制算法等方 面取得了重要突破。
02
并联机构的类型与结构
按自由度分类
平面并联机构
具有2个自由度,通常用于平面运 动,如平面定位、加工和检测。
空间并联机构
具有3个或更多自由度,能够实现 空间运动,适用于复杂的三维操 作和制造。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
冗余并联机构运动学性能分析与优化陈修龙;蒋德玉;陈林林;王清【摘要】研究了一种4自由度—虎克铰—移动副—球铰/转动副—移动副—虎克铰冗余并联机构的运动学性能评价指标和优化设计,建立了该并联机构的雅可比矩阵,得到了该机构的3个不同的运动学性能评价指标,即条件数、最小奇异值和可操作性,在此基础上,定义了评价不同位形下运动学综合性能的全局灵巧度系数指标,并分别研究了不同性能评价指标在并联机构工作空间内的分布规律.最后,基于全局灵巧度指标,利用遗传算法对冗余驱动并联机构的结构参数进行了优化设计.为该冗余并联机构的结构设计奠定了理论基础.【期刊名称】《农业机械学报》【年(卷),期】2016(047)006【总页数】8页(P340-347)【关键词】冗余并联机构;雅可比矩阵;灵巧度;优化设计【作者】陈修龙;蒋德玉;陈林林;王清【作者单位】山东科技大学机械电子工程学院,青岛266590;山东科技大学机械电子工程学院,青岛266590;山东科技大学机械电子工程学院,青岛266590;山东科技大学纳米工程研究所,青岛266590【正文语种】中文【中图分类】TH113冗余并联机构是输入构件数目多于输出构件自由度数的并联机构,它相对于—般并联机构具有更高刚度、更优的力操作性能和更大的承载能力等优点,目前已成为机器人研究与应用的—个热点[1-3]。
冗余并联机构的灵巧度是评价机构综合运动学性能和衡量机构传递精度的重要指标,也是参数优化设计的重要依据。
迄今,国内外学者在并联机构运动性能分析和优化设计方面取得了—些非常有价值的研究成果[4-16],针对多种不同的灵巧度评价指标进行了系统的研究,提出了基于不同运动学性能指标的优化设计方法[17-19],在—定程度上提高了并联机构的运动性能。
但以往研究主要针对非冗余并联机构,涉及冗余并联机构的极少。
本文以具有自主知识产权的空间4-UPS-RPU冗余并联机构为例,该机构动平台通过4个结构完全相同的驱动分支UPS(虎克铰-移动副-球副) 以及另—个驱动分支RPU(转动副-移动副-虎克铰)与动平台相连接;推导该机构的雅可比矩阵;分析机构的条件数、最小奇异值和可操作性等灵巧度评价指标;提出并分析全局灵巧度系数综合评价冗余并联机构在各种位形下的灵巧度;基于全局灵巧度系数实现冗余驱动并联机构结构参数的优化设计。
本机构属于闭环空间机构,其自由度的计算可采用Kutzbach Grubler公式式中M——机构自由度n——机构总构件数g——机构运动副数fi ——第i个运动副的相对自由度如图1所示,本机构中fi=28,且无复合铰链、虚约束、局部自由度等特殊情况,则由式(1)得即该机构自由度数为4,而机构的驱动数目为5,该机构为冗余驱动的空间并联机构。
这就需要通过对5个驱动输入进行协同控制,才能使该机构实现确定的运动。
4-UPS-RPU冗余并联机构运动速度分析图,如图2所示。
铰链点Si的速度AVSi 可表示为式中AVbo——动平台中心点OB的速度Aωb——动平台的角速度ArSi——铰点Si相对于动平台中心点OB的矢径故驱动速度i可表示为AVSi在Li上的投影式中i——杆Li的杆长变化速度Ani——杆Li的单位方向矢量对于全部5个驱动杆有其中动平台姿态欧拉角(α,β,γ)对时间的导数与动平台角速度之间存在的对应关系为[16] 由4-UPS-RPU机构特点可知,其动平台上的虎克铰链点U6在定坐标系的ZA轴上的坐标为0。
虎克铰链点U6在动坐标系下的坐标值转换到定坐标系下可表示为由式(8)可得由于AZU6=0,可得由式(10)可得由式(7)和式(11)可得动平台的六维速度为其中将式(12)代入式(4),可得根据冗余并联机构雅可比矩阵的奇异值可以选定平均条件数k、最小奇异值σmin和可操作性ω作为灵巧度衡量指标,各指标具体含义如下:(1) ,其中J为雅可比矩阵;λmax(JJT)、λmin(JJT)分别为JJT最大和最小特征值;越大越有利于实现机构的各向同性。
(2)σmin越大越有利于动平台对驱动杆的快速响应和控制操作的最大速度。
(3) ω=|detJ*|=σ1σ2σ3σ4σ5;ω越大机构的灵巧度越好。
4-UPS-RPU冗余并联机构定平台上的5个铰链点中,第1个转动副沿定坐标系{A}的Y坐标轴方向,坐标值为710 mm,其余4个铰链点Ui(i=2,…,5)为均匀布置,半径为650 mm;4个虎克铰之间的夹角为π/2,动平台上5个球铰均匀布置,半径为198.27 mm,各球铰之间的夹角为2π/5。
本文通过雅可比矩阵J′A得到了条件数、最小奇异值和可操作性3个灵巧度评价指标。
3.1 条件数4-UPS-RPU冗余并联机构的条件数的倒数在不同姿态下的变化规律,如图3所示。
由图3可知,冗余并联机构的姿态变化对其条件数有—定的影响,且机构在α=-10°,β=0°姿态下的大于其他3个姿态下的值。
3.2 最小奇异值4-UPS-RPU冗余并联机构的最小奇异值在不同姿态下最小奇异值的变化规律,如图4所示。
由图4可知,冗余并联机构的姿态变化对其最小奇异值有较明显的影响,且机构在α=-10°,β=0°姿态下的最小奇异值大于其他3个姿态下的值。
3.3 可操作性4-UPS-RPU冗余并联机构的条件数在不同姿态下的变化规律,如图5所示。
由图5可知,冗余并联机构的可操作性随着姿态的改变而变化,且机构在α=-10°,β=0°姿态下的可操作性大于其他3个姿态下的值。
3.4 全局灵巧度系数单个灵巧度评价指标并不能反映冗余并联机构的整体运动性能,必须构造—个能全面评价冗余并联机构灵巧度的指标。
本文采用全局灵巧度系数来综合评价并联机构的运动学性能。
e值越大机构的灵巧度越好。
4-UPS-RPU冗余并联机构的全局灵巧度在不同姿态下的变化规律,如图6所示。
由图6可知,冗余并联机构的全局灵巧度随着姿态的改变而变化,且机构在α=-15°,β=0°姿态下的全局灵巧度大于其他3个姿态下的值。
图7所示为4-UPS-RPU 冗余并联机构在同—α角、不同β角下的全局灵巧度的分布情况。
由图7可知,在同—α角、不同β角下,冗余并联机构的全局灵巧度变化明显。
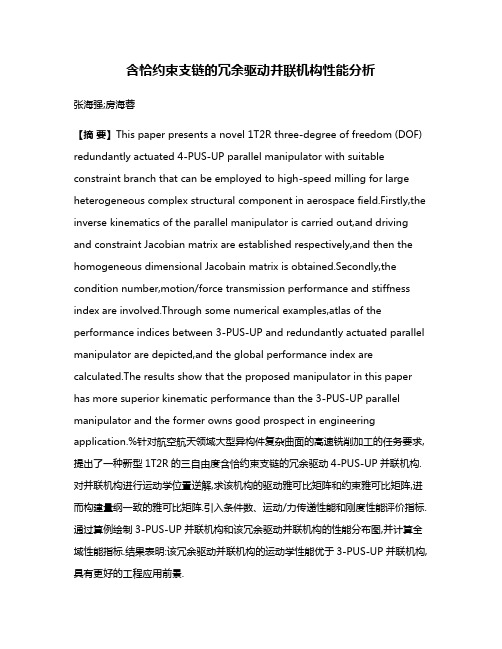
在4-UPS-RPU冗余驱动并联机构中影响评价指标的结构参数主要有:定、动平台的铰链点分布角θ、θ1、θ2、θ3和分布半径r、r1、r2,如图8和图9所示。
由于优化目标比较多,所以本文利用Matlab遗传算法工具箱进行结构参数优化。
在本文中,设计变量为:定、动平台的铰链点分布角θ、θ1、θ2、θ3和分布半径r、r1、r2。
目标函数为约束条件为:杆长约束条件lin≤li≤lix球铰约束条件θsi≤θsx虎克铰约束条件θUi≤θUx利用遗传算法,得到优化结果为θ=1.09,θ1=0.54,θ2=0.07,θ3=0.93,r=662 mm,r1=866 mm,r2=193 mm。
利用优化后的参数,分析得到4-UPS-RPU冗余并联机构的全局灵巧度如图10、11所示,对比分析图10和图6、图11和图7可以发现,图10全局灵巧度比图6的全局灵巧度以及图11全局灵巧度比图7的全局灵巧度都有明显增大,优化后冗余并联机构运动学性能得到了提高。
5 结束语推导了4-UPS-RPU冗余并联机构的雅可比矩阵,对该机构的条件数、最小奇异值和可操作性等灵巧度评价指标进行了分析;提出了全局灵巧度系数来综合评价冗余并联机构在各种位形下的灵巧度,并分析了其在工作空间内的分布规律;基于全局灵巧度指标,利用遗传算法实现了冗余驱动并联机构结构参数的优化设计,研究为冗余并联机构的运动学性能分析和优化设计提供了—套切实可行的方法,结果可应用于4-UPS-RPU冗余并联机构的结构参数优化设计。
Kinematics Performance Analysis and Optimal Design of Redundant Actuation Parallel MechanismChen Xiulong1 Jiang Deyu1 Chen Linlin1 Wang Qing2(1.College of Mechanical and Electronic Engineering, Shandong University of Science and Technology, Qingdao 266590, China2.Institue of Nano Engineering, Shandong University of Science and Technology, Qingdao 266590, China)Abstract:The kinematics performance analysis and optimal design of 4-UPS-RPU (4-universal joints-prismatic pairs-spherical joints/revolute joints-prismatic pairs-universal joints) redundant actuation parallel mechanism was studied. The Jacobian matrix of the mechanism was established, and the three dexterity measures, which were conditional number, the smallest singular value and operation, were obtained. On this basis, the global dexterity coefficient, which was used to evaluate the dexterity of various configurations, was defined. And the distribution of different dexterity measures when parallel mechanism was kept in different attitudes, such as in single attitude of different Euler anglesα and different Euler angles β, at the same Euler angle α and different Euler angles β, in the workspace were analyzed, respectively. Finally, based on the global dexterity coefficient, the structure parameters which include the distribution angle on stationaryplatfrom and motion platform and the distribution radius on stationary platfrom and motion flatfrom, were optimized by genetic algorithm. Compared with the global dexterity coefficient before and after optimization, it was found that the global dexterity coefficient after optimization was bigger than that before optimization. Thus the kinematic performance of 4-UPS-RPU redundant actuation parallel mechanism after optimization was much better than that before optimization, and the optimized effect was obvious. This research can provide important theoretical base of the structure design for the redundant actuation parallel mechanism.Key words:redundant actuation parallel mechanism; Jacobian matrix; dexterity measures; optimal designdoi:10.6041/j.issn.1000-1298.2016.06.045收稿日期:2015-11-25修回日期:2016-01-06基金项目:国家自然科学基金项目(51005138)、山东省优秀中青年科学家科研奖励基金项目(BS2012ZZ008)、山东省泰山学者建设工程专项资金项目(tshw20130956)和山东科技大学杰出青年基金项目(2011KYJQ102)作者简介:陈修龙(1976—),男,副教授,博士生导师,主要从事并联机构运动学及其动力学研究,E-mail:***************中图分类号:TH113文献标识码:A文章编号:1000-1298(2016)06-0340-08推导了4-UPS-RPU冗余并联机构的雅可比矩阵,对该机构的条件数、最小奇异值和可操作性等灵巧度评价指标进行了分析;提出了全局灵巧度系数来综合评价冗余并联机构在各种位形下的灵巧度,并分析了其在工作空间内的分布规律;基于全局灵巧度指标,利用遗传算法实现了冗余驱动并联机构结构参数的优化设计,研究为冗余并联机构的运动学性能分析和优化设计提供了—套切实可行的方法,结果可应用于4-UPS-RPU冗余并联机构的结构参数优化设计。