轴承沟道形状误差的最小二乘评定
轴承的公差等级及公差等级知识讲解学习

轴承的公差等级及公差等级知识轴承的公差等级及公差等级知识2009-1-7 16:56:05一,确定公差的两个基本要素轴承公差带是由标准公差和基本偏差两个基本要素确定的,标准公差确定公差带的大小;基本偏差确定公差带相对于零钱的位置。
1)标准公差:标准公差是由国家标准规定的,用于确定公差带大小的任一公差。
公差等级确定尺寸的精确程度,国家标准把公差等组分为20个等级,分别用IT01、IT0、IT1~IT18表示,称为标准公差,IT (International Tolerance)表示标准公差。
当基本尺寸一定时,公差等级愈高,标准公差值愈小,尺寸的精确度就愈高。
基本尺寸和公差等级相同的孔与轴,它们的标准公差相等。
为了使用方便,国家标准把≤500的基本尺寸范围分为 13尺寸段,按不同的公差等级对应各个尺寸分段规定出公差值,并用表的形式列出。
2)基本偏差;国家标排规定用来确定公差带相对于零线位置的上偏差或下偏差;一般为最靠近零线的那个偏差为基水偏差。
当公差带位于零线的上方时,基本偏差为下偏差;当公差带位于零钱的下方时,基本偏差为上偏差,如图2 所示。
二,公差等级表(GB/T1804-2000)线形尺寸的极限偏差数值公差等级基本尺寸分段0.5~3 >3~6 >6~30 >30~120 >120~400 >400~1000 >1000~2000 >2000~4000精密f ±0.05 ±0.05 ±0.1 ±0.15 ±0.2 ±0.3 ±0.5中等m ±0.1 ±0.1 ±0.2 ±0.3 ±0.5 ±0.8 ±1.2 ±2粗糙c ±0.2 ±0.3 ±0.5 ±0.8 ±1.2 ±2 ±3 ±4最粗v ±0.5 ±1 ±1.5 ±2.5 ±4 ±6 ±8(GB/T1804-2000)倒圆半径和倒角高度尺寸的极限偏差数值公差等级基本尺寸分段0.5~3 >3~6 >6~30 >30精密f ±0.2 ±0.5 ±1 ±2中等m粗糙c ±0.4 ±1 ±2 ±4最粗v注:倒圆半径和倒角高度的含义参见GB/T6403.4(GB/1804-2000)角度尺寸的极限偏差数值公差等级长度分段~10 >10~50 >50~120 >120~400 >400精密f ±1° ±30′ ±20′ ±10′ ±5′中等m粗糙c ±1°30′ ±1° ±30′ ±15′ ±10′最粗v ±3° ±2° ±1° ±30′ ±20′(GB/T1184-1996)直线度和平面度的未注公差值公差等级基本长度范围≤10 >10~30 >30~100 >100~300 >300~1000 >1000~3000 H 0.02 0.05 0.1 0.2 0.3 0.4K 0.05 0.1 0.2 0.4 0.6 0.8L 0.1 0.2 0.4 0.8 1.2 1.6(GB/T1184-1996)垂直度未注公差值轴承公差等级基本长度范围≤100 >100~300 >300~1000 >1000~3000H 0.2 0.3 0.4 0.5K 0.4 0.6 0.8 1L 0.6 1 1.5 2(GB/T1184-1996)对称度未注公差值公差等级基本长度范围≤100 >100~300 >300~1000 >1000~3000H 0.5K 0.6 0.8 1L 0.6 1 1.5 2(GB/T1184-1996)圆跳动的未注公差值公差等级圆跳动公差值H 0.1K 0.2L 0.5三,轴承滚子的公差等级圆柱和圆锥滚子公差分为四级:0、Ⅰ、Ⅱ、Ⅲ级,公差等级依次降低。
基于最小二乘法的电主轴回转精度评价

DoI:10.19287/j.cnki.1005-2402.2018.02.011
Rotation accuracy evaluation of electric spindle based on least square m ethod W ANG Liping,ZHANG Binbin,W U Jun
201 8年 第 2期
基 于 最 小 二 乘 法 的 电主 轴 回转 精 度评 价 冰
王 立 平 张彬 彬 吴 军
(清 华大 学机械 工 程 系 ,北 京 100084)
摘 要 :以应 用 于五 轴加 工 中心上 的 高速 电主轴 为研 究对 象 ,研 究基 于最小 二乘 法 的 电主轴 回转 精度 评 价 。 首 先建 立 电主轴 回转 误差 模型 ,对 电主 轴 的常量 信号 、偏 心信 号等 相关信 号 进 行研 究 和分 离 。针 对 电主轴 回转 精度 的最 小二 乘 法评定 方 法 。分 析对 比了最小 二乘 牛 顿迭代 算 法 、最 小 二 乘近 似 算 法和 平均值 算 法。基 于标 准球 、高精密 电容 位移 传 感器等 组成 的测量 系统 。采集 电主轴 高 速 转动 下 的径 向跳动 信号 。并分 别 采用 3种 算法对 信 号进 行处 理与 分析 ,验证 了 3种算 法 的 有效 性 。最 后 在分 析 对 比 3种算 法结 果后 ,设计 了不 同应 用 背景 下 的 电主 轴 回转精 度 评价 策略 ,并 提 出 了一 种兼 顾 计 算 精度和计算效率的电主轴 回转精度快速评价算法。
K eywords:electric spindle;rotation accuracy;least square circle;newton iterative method
面向轴孔类零件圆度误差评定的改进式最小区域圆法
最小区域线的概 念,并 将 其 作 为 最 小 区 域 圆 的 控
[ ]
制线;
GADELMAWLA 12 通过建 立 凸 包,利 用 圆
弧半径的 大 小 关 系 依 次 去 除 测 量 点 集 中 的 无 效
点,在剩余的点集 中 循 环 搜 索,搜 索 出 了 MZC 的
[ ]
最小区域圆法以测量点集的最小区域圆的圆
凸包点集,那么所 作 外 接 圆 为 测 量 点 集 的 最 小 外
心来评定圆度误差.测量点集的最小区域圆指满
解最长边两侧与其 相 距 最 远 的 两 点,与 最 长 边 构
足以下条件的两个同心 圆:① 所 有 测 量 点 都 在 两
成四边形. 在 四 边 形 中,依 次 计 算 过 相 邻 三 点 的
MIC 控制点 的 求 解 分 别 需 要 构 造 外 凸 包 点 集 和
内凸包点集 [8],以简化计算量、获取符合要求的测
量点.但该构造 过 程 极 其 复 杂,特 别 是 内 凸 包 点
集的“不唯一性”会对评定结果造成很大的不确定
性.本文所提出的方法以测量点间的距离为判定
依据,遵循多边形去除法则,在无需求解凸包点集
之间的关系 [15],最小区域圆的控 制 点 可 通 过 最 小
外接圆与最大内接圆的控制点进行求解.
最小外接圆和最大内接圆的构建过程遵循锐
角三角形或对径准则,即:在求解圆上有三点与测
量点集接触,该三点组成锐角三角形;或只有两点
与测量点集接触,此 时 两 Fra bibliotek 的 中 点 为 求 解 圆 的 圆
心.因此,最 小 区 域 圆 的 两 个 外 控 制 点 可 以 从 最
轴承内径偏差测量结果的不确定度评定-6205-1

轴承内径偏差测量结果的不确定度评定一:概述1:目的评定轴承内径偏差测量结果的不确定度2:依据JJF1059-1999 《测量不确定度评定与表示》JJG471-2003 《轴承内、外径检查仪检定规程》JJG118-1996 《扭簧式比较仪检定规程》GB/T307.2-2005《滚动轴承测量和检验的原则和方法》3: 方法概要在轴承内径测量仪D923A上测量,用标准环规φ20作为参考基准,测量NCL204EV/C3轴承内径1 套,在重复条件下连续测量十次。
取十次实测值的平均值作为测量结果。
4:测量标准三级标准环规:φ255: 环境条件温度(20±2)℃温度梯度0.5℃6: 被测对象NCL204EV/C3轴承1套二:评定1:A类不确定度:在轴承内径测量仪D923A上测量,用标准环规φ20作为参考基准,测量NCL204EV/C3轴承内径1 套。
在重复条件下连续测量十次,得到测量列(单位为μm):按A类评定贝塞尔公式可得单次实验标准差:沈志峰:si =0.21μm ua= s i =0.21μm顾宇杰: si =0.37μm ua= s i =0.37μm第 1页 /共 3页2: B 类不确定度:2.1由工作标准环规引入的不确定度:✧ 直线度误差实测(如图一):△L1= 0.4237μmu 轴向=2×△L1/23=0.24μm ✧ 周向测点不一致引起的不确定度误差由于标准环规圆度值很小且定点对表,计算值在此忽略不计。
✧ 标准件直接引入的不确定度u 标其数值直接因引用滚动轴承内径标准器标准不确定度的研究,Φ20mm 标准件 U 95=0.60μm ,k=2,由此:u 标=U 95/k=0.60/2=0.30μm2.2 由内径测量仪器引入的不确定度u 仪采用仪器示值时的情况,根据JJG471-2003,规定1μm 分度值的内径测量仪按新制出厂精度,示值误差为±1μm ,因仪器示值误差服从正态分布,故u 仪=0.33μm2.3:指示表头误差引入的不确定度u 表由JJG118-1996,分度值1μm 的扭簧比较仪±30分度内最大极限误差±0.4μm,所以,以正态分布计u 表 =0.4/3=0.13 μm2.4:支点与测点高度引起的不确定度u 高u 高=c Dwp t .Δ321⨯=15001.0×1321 ⨯=0.02μm2.5: 由温度差(室温变化)引入的不确定度u 温轴承钢线性膨胀系数α=11.2×10-6/℃,温度差为0.5℃Δ=d α·δθ=25×11.2×10-6×0.5=0.14μm第 2页 /共 3页 u 温=Δ/32=0.04μm3: 合成不确定度:u C = 沈志峰 = = 0.57μm (采用仪器示值时)顾宇杰 = = 0.63μm (采用仪器示值时)4: 扩展不确定度:沈志峰:U 95=k ×u C =2×0.57=1.14μm(k=2)综上,本次测试结果表示: 样件NCL204EV/C3 内径单一平面平均内径偏差-3.4μm U 95=1.14μm (k=2)顾宇杰:U 95=k ×u C =2×0.63=1.26μm(k=2)综上,本次测试结果表示: 样件NCL204EV/C3 内径单一平面平均内径偏差-3.45μm U 95=1.26μm (k=2)2222222温高表仪标轴u u u u u u u l a ++++++222222204.002.013.033.030.024.021.0++++++222222204.002.013.033.030.024.037.0++++++。
滚动轴承圆度和波纹度误差测量

滚动轴承圆度和波纹度误差测量1 范围本标准规定了用接触式圆度测量仪以半径变化量来确定滚动轴承零件在规定部位的圆度和波纹度误差的测量及评定方法。
本标准适用于公称外径3mm~1000mm的各类滚动轴承零件的圆度和波纹度误差的测量和评定。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅所注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 7234 产品几何量技术规范(GPS) 圆度测量术语、定义及参数3 术语和定义GB/T 7234界定的以及下列术语和定义适用于本文件。
3.1圆度误差 roundness deviation以基准圆的圆心得出的被测零件轮廓的最大半径和最小半径之差来确定被测截面的圆度误差。
3.2波纹度误差 waviness deviation随机或周期性偏离理想圆的表面不平度,取高于圆度波数的一个范围内的波数集合的峰谷幅值作为波纹度误差。
4 测量要求4.1 仪器4.1.1 测量仪器类型测量仪器为接触式圆度测量仪,可为传感器旋转式或工作台旋转式。
4.1.2 测量结果输出方式测量结果有两种输出方式,即图形记录式或参数直接显示式。
同一台仪器可具有一种或两种输出方式。
4.1.3 频率响应、滤波特性对于公称外径3mm~350mm的滚动轴承零件,被测轮廓频率响应范围为(2~500)upr(upr即undulations per revolution 波数/转)。
对于公称外径350mm~1000mm的滚动轴承零件,被测轮廓频率响应范围为(2~1500)upr。
圆度测量时的频率响应范围为(2~15) upr及(2~50) upr,滤波器通带名义截止端的传输率为75%。
推荐采用(2~15)upr的频率响应范围。
波纹度测量时的频率响应范围为(15~150)upr及(15~250)upr,滤波器通带名义截止端的传输率为75%。
形状误差及其评定

2
2.有配合性质要求的要素,
一般采用包容要求(ER);
3.对于保证可装配性、无配合性质要求的要素,一般采用最大实体要求(MMR);
4.对于保证临界值的设计,以控制最小壁厚保证最低强度,一般采用最小实体要求(LMR)。
三、基准要素的选用 根据零件的安装、作用、结构特点以及加工和检测要求等来选用; 但应尽量遵循设计、工艺、测量和工作等基准统一原则。
作业: P118-120 思考题 2、4,作业题 3、 6、7、 8
16
17
18
19
20
谢谢
高-低-高 和 低-高-低准则
(2)近似法: 两端点连线法 图4.59
7
图4.58
例4.4 用框式水平仪测量导轨的直线度误差,测得数据( µm)如下:
8
测点 读数值 累积值
0
1
2
3
4
5
6
7
8
0
+20
-10
+40
-20
-10
-10
+20
+20
0
+20
+10
+50
+30
+20
+10
+30
+50
解:根据累积值绘图见P114 图4.60
两个平行平面间的距离为平面度误差。
(3) 用旋转法进行转换:
评定平面度误差时,需将被测平面上各点对测量基准的坐标值转换为各测点对评定基准(理想平面)的坐 标值。
图4.62
11
例4.5 用打表法测得某一平面,相对其测量基准面的坐标值如图4.63所示( µm )。试求该平面的平 面度误差。
轴承精度和公差等级[精华]
![轴承精度和公差等级[精华]](https://img.taocdn.com/s3/m/3a12c38d5901020206409c84.png)
轴承精度和公差等级[精华]轴承的公差和等级对照轴承的公差和等级对照表摘要:轴承精度GB国家规范分为公差ISOJIS规范详细公役ABEC内圈单位um外圈单位umEABEC内圈单位um外圈单位umDABEC内圈单位um外圈单位umBABEC内圈单位um外圈单位umimgsrchttpwwwcnbearingcomhydtpic3.9jpgborder 液体动态压轴承常用轴壳配轴承轴承的密封类型精细轴承工序间防锈新工艺轴承寿数强化实验偏心轴的一种加工详解并联机床的设计理论与关键技术无油轴承股动模具职业革新我国轴承寿数强化实验方兴未已(一)我国轴承寿数强化实验方兴未已(二)轴承精度依照GB/T307-94>的国家规范能够分为G E D C B.。
这些公役和ISO、JIS等规范对照如下:B级/ABEC7级内圈单位: um轴承精度按照GB/T307-94>的国家标准可以分为G E D C B.。
这些公差和ISO、JIS等标准对照如下:标准精度GB/T307-94 B C D E GISO CLASS2 CALSS4 CLASS5 CLASS6 NORMAL CLASSDIN P2 P4 P5 P6 P0ANSI ABEC9 ABEC7 ABEC5 ABEC3 ABEC1JIS JIS2 JIS4 JIS5 JIS6 JIS0轴承精度轴承的精度等级与划分标准滚动轴承的精度分(主要)尺寸精度与旋转精度。
精度等级已标准化,分为0级、6X级、6级、5级、4级、2级六个等级。
精度从0级起依次提高,对于一般用途0级已足够,但在用于其他条件或场合时,需要5级或更高的精度。
以上的精度等级虽然是以ISO标准为基准制定的,但其称呼在各国标准中有所不同。
尺寸精度(与轴及外壳安装有关的项目)1、内径、外径、宽度及装配宽度的允许偏差2、滚子组内复圆直径及外复圆直径的允许偏差3、倒角尺寸的允许界限值4、宽度的允许变动量旋转精度(与旋转体跳动有关的项目)1、内圈及外圈的允许径向跳动和轴向跳动2、内圈的允许横向跳动3、外径面倾斜度的允许变动量4、推力轴承滚道厚度的允许变动量5、圆锥孔的允许偏差和允许变动量轴承类型与适用精度等级轴承分类适用标准适用精度等级深沟球轴承 0级?6级5级4级 2级角接触球轴承 0级?6级5级4级 2级 GB307 调心球轴承 0级圆柱滚子轴承 0级?6级5级4级 2级公制系列(单列) GB3070级6级6级5级4级圆锥滚子轴公制系列(双列、四列) SB/T53419940级承英制系列 SB/CO/T1089Class4Class2Class3Class0 Class00 调心滚子轴承 0级推力球轴承 GB307 0级?6级5级4级推力调心滚子轴承 0级GB/T30794标准将轴承等级划分为GEDCB,ISO、JIS等标准对照标准精度GB/T30794 BCDE G ISO CLASS2CALSS4CLASS5CLASS6 NORMAL CLASSDIN P2P4P5P6 ANSI ABEC9ABEC7ABEC5ABEC3 ABEC1 JIS JIS2JIS4JIS5JIS6 JIS0轴承精度等级的选择性能要求用例适用精度等级音响、影像机器主轴(录像机、录音机) P4雷达、抛物面天线转轴 P5、P4、P2、要求放置体具机床主轴 ABEC9电子计算机、磁盘主轴有高跳动精度 P5、P4、P2、铝箔辊颈 ABEC9多级轧钢机支承轴承 P5P4P5、P4 增压器 P5、P4 喷气式发动机主轴、辅机 P5、P4 离心分离机 P5 高速旋转液化天然气泵 P5、P4 涡轮分子泵主轴、保护轴承 P5、P4、P2、机床主轴ABEC9 涨紧轮 P5、P4P4、ABMA 7P 控制机器(同步马达、伺服马达、陀螺万向架) 要求摩擦及摩P5 计量仪表擦变化小 P5、P4、P2、机床主轴 ABEC9小型马达、齿轮传动装置、凸轮传动装置、发电器、低感应同步伺一般精度P0、P6 服电机、压力转子、打印机、复印机、检测仪器轴承公差等级公制轴承普通组间隙P6P5P4P4ASPUPPA9A英制轴承普通组间隙轴承游隙所谓内部游隙是轴承外轮、内轮、钢球间的游隙量。
轴承检验规范 (2)
为了严格控制轴承产品质量,规范轴承检验标准,为采购该产品的验收工作提供指导依据。
2. 适用范围本规范适用于运用最为广泛的深沟球轴承的检验验收。
其余的例如:圆锥滚子轴承、圆柱滚子轴承、推力球轴承、角接触球轴承、四点接触球轴承、调心球轴承等不在本检验规范内。
3. 引用标准GBT307.1-2005滚动轴承、公差。
GBT307.2-2005滚动轴承、公差的测量方法。
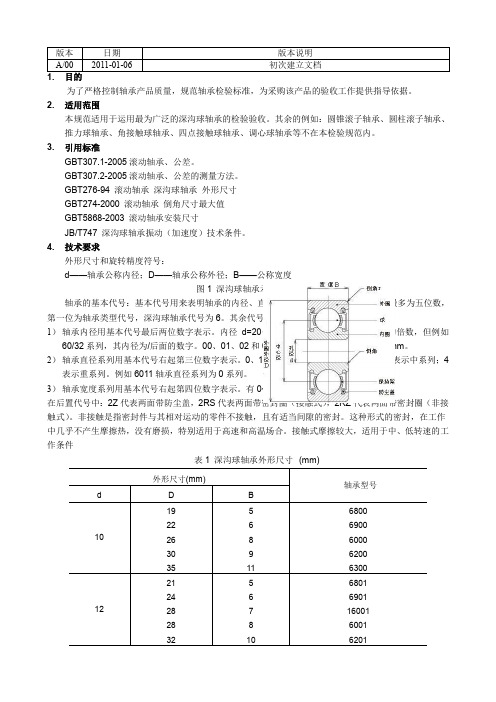
GBT276-94 滚动轴承深沟球轴承外形尺寸GBT274-2000 滚动轴承倒角尺寸最大值GBT5868-2003 滚动轴承安装尺寸JB/T747 深沟球轴承振动(加速度)技术条件。
4. 技术要求外形尺寸和旋转精度符号:d——轴承公称内径;D——轴承公称外径;B——公称宽度图1 深沟球轴承示意图轴承的基本代号:基本代号用来表明轴承的内径、直径系列、宽度系列和类型,一般最多为五位数,第一位为轴承类型代号,深沟球轴承代号为6。
其余代号分述如下:1)轴承内径用基本代号最后两位数字表示。
内径d=20~480mm的轴承内径一般为5的倍数,但例如60/32系列,其内径为/后面的数字。
00、01、02和03对应内径为10、12、15和17mm。
2)轴承直径系列用基本代号右起第三位数字表示。
0、1代表特轻系列;2表示轻系列;3表示中系列;4表示重系列。
例如6011轴承直径系列为0系列。
3)轴承宽度系列用基本代号右起第四位数字表示。
有0~6七种,表示宽度尺寸依次变宽。
在后置代号中:2Z代表两面带防尘盖,2RS代表两面带密封圈(接触式),2RZ代表两面带密封圈(非接触式)。
非接触是指密封件与其相对运动的零件不接触,且有适当间隙的密封。
这种形式的密封,在工作中几乎不产生摩擦热,没有磨损,特别适用于高速和高温场合。
接触式摩擦较大,适用于中、低转速的工作条件表1 深沟球轴承外形尺寸(mm)5.5.1 包装及外观检验5.1.1 检查质量合格证、外包装上标识、精度等级与包装内产品是否相符,包装上有高温轴承标识的产品,应验证厂家出厂检测报告上使用的油脂及耐热温度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
·1 2 4· 廓效果最佳 。 令 :
N
机 械 工 程 与 自 动 化 2 0 1 2 年第 6 期
依据求最小值的 方 法 , 对 系 数a ′ b ′ c求偏导数 i、 i、 ) ′ -2 a ′ b ′ z ′+ c ′ +z ′-2 y y ∑(
2 i j 2 i j 2
第 6期( 总第 1 7 5期) 2 0 1 2年1 2月
机 械 工 程 与 自 动 化 ME CHAN I C A L E NG I N E E R I NG & AUT OMA T I ON
N o . 6 D e c .
( ) 文章编号 : 1 6 7 2 4 1 3 2 0 1 2 0 6 1 2 3 3 -6 -0 -0
) 乘拟合方程见图 1。 对式 ( 展开并整理得 : 1
2 2 2 2 2 ) z - 2 a ′ 2 b ′ z+( a ′ b ′ r = 0。 … ( 2 y+ y- i i i + i - i) 2 2 2 ) 令c= 由式 ( 得: a ′ b ′ r 2 i + i - i, 2 2 ) z -2 a ′ b ′ z+ c=0 。 …………… ( 3 y+ y-2 i i , 以每条线轮廓上测点坐标 ( 代入式( 方 ′ z ′ 3) y i i j, j) 程式明显不等于零 , 而为 : 2 2 ) ′ z ′ a ′ ′ b ′ z ′ c 。 …… ( 4 Δ y y i i i i i i i j= j+ j -2 j -2 j+ 其中 : Δ i j 为实际线轮廓 上 各 点 与 理 论 线 轮 廓 上 对 应 点
在空间坐标系中 , 直接用最小二乘法求每条线轮 廓的中心点比较复杂 , 为了便于计算 , 将空间内的线轮 廓绕 z 轴转θ o z 平面 。 其中 : i 角度至y
y i j 。 r c t a n θ i=a x i j 空间线轮廓上各点坐标通过坐标 ( 变换 x z y i i i j, j, j)
的函数偏差值 。 设 :
N j = ∑Δi
2
N
j=1
j=1
′ y ∑(
2 i j
2 2 ) 。 ′ a ′ ′ b ′ z ′ c +z y i i i i i j -2 j-2 j+
) ……………………………………………………… ( 5 当偏差值为最小 值 时 , 理论线轮廓逼近实际线轮
) ; 河南省教育厅自然科学研究计划项目 ( ) ; 河南科技大学博士科研启动基金项目 5 0 8 7 5 0 7 6 2 0 0 8 A 4 6 0 0 0 7 櫜 国家自然科学基金资助项目 ( ; 修回日期 :2 收稿日期 :2 0 1 2 5 7 0 1 2 6 0 -0 -1 -0 -3 , 男 , 河南洛阳人 , 在读硕士研究生 , 主要研究方向为机械制造过程监控及检测技术 。 作者简介 : 周佳 ( 1 9 8 5 -)
)= F( a ′ b ′ c i, i,
i i j
i i j
。
后得出 :
j=1
) ……………………………………………………… ( 6
N
2 2 F ( ) ·( ′ a ′ 0 b ′ z ′ c ′ ′ ′ -2 =0 y y y i i i i i i i j+z j-2 j -2 j+ j) 烄 =0 烄 ∑ 1 j= a ′ i
0 引言 轴承主要用于确 定 旋 转 件 与 固 定 件 相 对 运 动 , 是 在机器及各类机械 起支承或导向作用的 典 型 零 部 件 , 研究轴承沟道形状误差评定 中占有重要地位 。 因 此 , 对提高轴承的精度及整个机器或机械的性能有重要的 意义 。 目前多使用圆 度 、 线轮廓度来评价轴承沟道形 状误差 , 即用一条线 轮 廓 和 底 圆 形 成 的 几 何 要 素 的 误 而对轴承沟道整 差对轴承沟道的形状 误 差 进 行 评 定 , 体形状误差的评定国内外很少报道 。 本文依据最小二 提出了轴承沟道形状误差的最小 乘形状误差的定义 , 二乘评定 。 1 最小二乘算法过程及步骤 1. 1 提 取 测 量 点 坐标 将工件水平放置在工作台上 , 利用三坐标测量机对 轴承沟道的每条线轮廓进行采样取点 , 从中取得的测量 ( , , …, 点为 P x z i表 示 测 量 线 轮 廓 数, i=1 2 y i i i i j( j, j, j) , , …, 。 M; = 1 2 N) j 表示每条线轮廓上的测量点数 , j 1. 2 求 空 间每 条 线轮廓 的 中 心 点 通过三坐标测量机对轴承沟道每条线轮廓进行测 量并得到采样点 , 用最小二乘法对每条线轮廓求其半 径及圆心的位置 , 但轴承沟道轮廓是非整圆 , 不能直接 需要坐标变换求空间每条 用整圆的最小二乘法 公 式 , 线轮廓的中心点 。 1. 2. 1 坐标变换
轴承沟道形状误差的最小二乘评定
周 佳 , 雷贤卿
( ) 河南科技要 : 结合轴承沟道形状误差的几何特性 , 提出了轴承沟道形状误差的最小二乘评定 , 详细阐述了利用 最 小 二乘算法求解轴承沟道形状误差的过程和步骤 。 该算法采用最小二乘法拟合每条线轮廓的中心 , 得到一 个 空 间圆及方程 ; 求解空间圆与每条线轮廓所在平面的交点坐标 ; 计算每条线轮廓上测点至所对应的每个交 点 的 距离中最大值和最小值之差 , 从中找到最大极差值 , 即得到包容整个轴承沟道的最小二乘形状误差值 。 该 算 法简单明确 , 具有精度高 、 易于计算机程序实现 、 易于推广应用等特点 。 关键词 : 最小二乘 ; 轴承沟道 ; 形状误差 中图分类号 :TH 1 3 3.3 文献标识码 :A
2 2 ( 。 至y x z ′ z o z 平面上的新坐标为 : ′ y y i i i i i j= 槡 j+ j, j= j)
1. 2. 2 求所有平面线轮廓的圆心 设平面线轮廓的最小二乘拟合方程为 :
2 2 2 ) ( a ′ z- b ′ r 1 y- i)+ ( i)= i 。 ………………… ( , 其圆心为 ( 半 径 为r 平面线轮廓最小二 a ′ b ′ i, i) i,