ZSG-18型排爆机器人使用说明书
18工业机器人培训课件焊接机器人基本操作及应用

高频点火器
割炬
教材(图18-3)机器人切割系统
第18章 焊ቤተ መጻሕፍቲ ባይዱ机器人应用(5)
教材(图18-5)装载机驱动桥体的机器人焊接系统
第18章 焊接机器人应用(6)
(后桥总成图片)
教材(图18-7)帕萨特后桥总成双机器人焊接工作站
第18章 焊接机器人应用(7)
控制柜 机器人1
外部轴1
工位1
机器人2
外部轴 变位器
第18章 焊接机器人应用(3)
机器人 控制柜
安全围栏
第一工位
外部轴变 位装置
第二工位 (装卸工位)
教材(图18-2)三轴垂直翻转双工位机器人工作站
第18章 焊接机器人应用(4)
配气装置 控制装置
切割机器人系 统主要由由以下
四部分组成: 1.机器人部分
2.控制部分 3.配气部分 4.割炬部分
机器人本体
遮光栅
观察窗
触摸屏
数量 1 1 1 1 1 1 2 2 1
1
1
1
型号
350GR3
BRS-CC TA1400 500KG 高2100mm
焊接机器人基本操作及应用
2019年7月
焊接机器人基本操作及应用
2019年7月
第18章 焊接机器人应用(1)
教材(图18-9)自行车 三角架工装(焊前示教)
教材(图18-10)自行车 三角架鱼鳞纹焊接效果
第18章 焊接机器人应用(2)
维修入口门 第二工位
第一工位 回转台
教材(图18-1)水平回转台式双工位机器人系统图
外部轴2 工位2
工件装 卸位置
操作盒
教材(图18-8)三轴垂直翻转双机器人平面布置图
排爆机器人
排爆机器人
品牌:浦喆
指标:
一、行走装置
1.仰角履带式行走,仰角33°
2.四轮双驱动
3.具有前进、后退、转弯、爬坡、爬楼梯等功能,可以在各种地形环境中工作,包括楼宇、户外、建筑工地,会场内、机舱内、甚至坑道、废墟。
4.运动灵活,行走速度:37米/分钟
二、工作装置
1.二臂杆4+1自由度
2.机械手360°无卡阻旋转,开合距离 230毫米
3.腰转(水平旋转)±120°
4.手臂伸展长度1.1米,最大抓重10公斤以轻松处置藏于汽车底部的可疑物品。
机械手上直接架设水炮枪,任务处置更灵活。
三、视频系统
1.一个两自由度(水平360°无卡阻,上下-45°~+120°)云台彩色调焦摄像机,二个低光(彩转黑)定焦摄像机
2.12.1″彩色液晶显视器
3.单画面切换
四、控制系统
1.上位机控制箱面板操作
2.无线和有线控制,两种方式可选。
3.操控距离100米,有线电缆卷筒手动收放线
五、水炮枪(选配)
1.口径38毫米
2.双路激光瞄准
3.双路减震器
4.电起火操控
六、外形尺寸:长1050毫米×宽520毫米×高720毫米
七、电源:DC24V、锂电池、配充电器。
灭火机器人使用说明
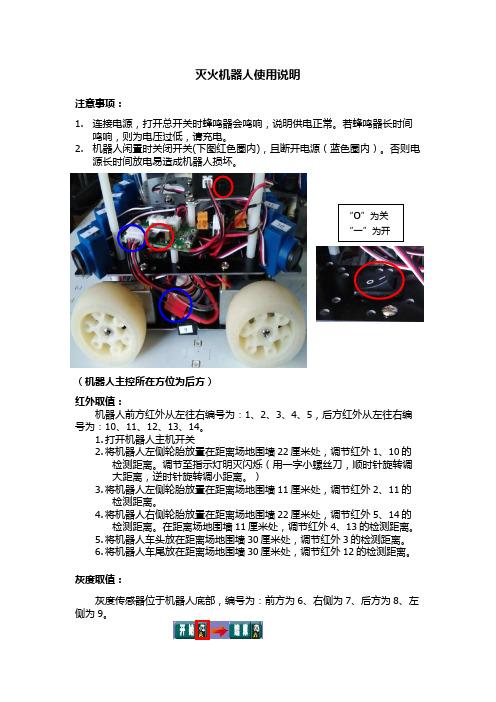
灭火机器人使用说明注意事项:1. 连接电源,打开总开关时蜂鸣器会鸣响,说明供电正常。
若蜂鸣器长时间鸣响,则为电压过低,请充电。
2. 机器人闲置时关闭开关(下图红色圈内),且断开电源(蓝色圈内)。
否则电源长时间放电易造成机器人损坏。
(机器人主控所在方位为后方)红外取值:机器人前方红外从左往右编号为:1、2、3、4、5,后方红外从左往右编号为:10、11、12、13、14。
1. 打开机器人主机开关2. 将机器人左侧轮胎放置在距离场地围墙22厘米处,调节红外1、10的检测距离。
调节至指示灯明灭闪烁(用一字小螺丝刀,顺时针旋转调大距离,逆时针旋转调小距离。
)3. 将机器人左侧轮胎放置在距离场地围墙11厘米处,调节红外2、11的检测距离。
4. 将机器人右侧轮胎放置在距离场地围墙22厘米处,调节红外5、14的检测距离。
在距离场地围墙11厘米处,调节红外4、13的检测距离。
5. 将机器人车头放在距离场地围墙30厘米处,调节红外3的检测距离。
6. 将机器人车尾放在距离场地围墙30厘米处,调节红外12的检测距离。
灰度取值:灰度传感器位于机器人底部,编号为:前方为6、右侧为7、后方为8、左侧为9。
新建文件,鼠标双击上图中开始图标右半部分方框区域,弹出编辑框:根据机器人自身的测试值进行修改上图中方框内的B1,B2的值。
灰度黑色分界值B1为机器人底部灰度在场地黑色部分的值,取4个灰度的最大值再加200;灰度白色分界值B2为机器人底部灰度在场地白色部分的值,取4个灰度的最小值再减200。
点击“保存模板”,再保存。
灰度取值方法为:1.打开机器人主机开关;2.按主控左下方按钮进行选择,选定“TEST”选项,按右上方按钮确定;3.选择“Analog”选项,查看通道口6、7、8、9的数值。
如:黑色值,1309、1200、1102、1211,则将B1的数值改为1500 白色值,2601、2722、2655、2695,则将B2的数值改为2400函数说明:新建文件,点击左下方“任务”按键,跳转至任务功能模块。
救生消防设备操作规程汇总

9L手提式泡沫灭火器操作说明PROCEDURE FOR PORTABLE FOAM EXTINGUISH 1.拔下安全销Pull out safety--pin2.把控制杆压到底Press the control lever all the way down3.对着火根部进行灭火Direct at the base of flame and squeeze the trigger抛绳枪操作规程PROCEDURE FOR LINE-THROWING APPLIANCE 1.将抛射绳后端系固在船上,将抛射体细钢索与抛射绳连接在一起,注意抛射绳不要扭缠或打结。
Tie the end of line to the steady parts of the ship , connect the line and the steel line on the throwing part, ensure the line no twist, tangle and overlapping.2.将底火装入发射筒底部拧紧。
Fit cartridge into firing tube on the bottom side using screw driver until the end of cartridge come to the rear surface of firing tube and stop .3.将保险栓后拉至“f”位置时再扳向右侧,到“s”位置,上好保险。
Pull the handle of firing gun to "F" Position ,then turn right to the position marked with " S"4.将发射筒和发射器组装在一起。
Fix together the prepared firing gun and firing tube5.将抛射体放入抛射筒内。
全部整合排爆机器人使用说明

全部整合排爆机器人使用说明关键信息:1、排爆机器人型号:____________________________2、操作权限:____________________________3、适用场景:____________________________4、维护周期:____________________________5、故障处理流程:____________________________11 引言本协议旨在为用户提供关于全部整合排爆机器人的详细使用说明,以确保其安全、有效地执行排爆任务。
111 排爆机器人概述排爆机器人是一种专门设计用于处理危险爆炸物的高科技设备,具备先进的传感器、机械臂和控制系统。
112 主要功能包括但不限于探测爆炸物、抓取和转移爆炸物、远程操控等。
12 操作前准备121 操作人员培训操作人员必须经过专业培训,熟悉机器人的操作流程和应急处理方法。
122 环境评估在使用前,对操作环境进行全面评估,确保无干扰因素影响机器人工作。
13 启动与连接131 电源接入按照正确的方式接入电源,并检查电源指示灯是否正常。
132 通信连接建立稳定的通信连接,确保操作人员与机器人之间的数据传输流畅。
14 操作界面介绍141 主控制界面详细说明各个控制按钮、参数显示区域的功能和含义。
142 监控画面解释监控画面中不同图像和数据的代表意义。
15 移动控制151 前进、后退、转弯操作明确操作指令对应的移动动作和速度控制方法。
152 越障能力及应对策略介绍机器人在遇到不同障碍物时的处理方式。
16 探测功能使用161 传感器类型及工作原理阐述机器人所配备的各类传感器,如红外、化学等传感器的工作原理。
162 探测模式选择根据不同的任务场景,选择合适的探测模式。
17 机械臂操作171 抓取动作控制精准控制机械臂的抓取力度和角度。
172 精细操作技巧如何进行微小物品的抓取和操作。
18 排爆流程181 发现爆炸物如何确认爆炸物的位置和类型。
排爆机器人操作手册
目录第一章上位机遥控箱介绍 (3)1.1 面板介绍 (3)1.2 界面介绍 (4)第二章排爆机器人操作说明 (6)2.1 监视及显示查看 (6)2.1.1 指示灯显示 (6)2.1.2 视频显示 (6)2.1.3 报警错误消息提示 (7)2.1.4 设置的速度显示 (7)2.1.5 各轴位置及使能情况显示 (8)2.1.6 机械臂末端速度显示 (10)2.2 初始化与清错操作 (10)2.3 上下使能操作 (11)2.4 模式切换操作 (12)2.5 暂停、急停及复位操作 (13)2.6 机器人运动全局速度设置 (13)2.7 车体运动操作 (14)2.7.1 单轴运动操作 (14)2.7.2 车体行进转向操作 (14)2.8 摆臂运动操作 (15)2.8.1 单轴运动操作 (15)2.8.2 分组控制操作 (15)2.8.3 耦合控制操作 (16)2.9 机械臂运动操作 (16)2.9.1 机械臂点动操作 (16)2.9.2 末端平动控制 (17)第三章日常故障及处理 (18)3.1 网络通讯故障 (18)3.2 电压不足 (18)第四章技术参数 (18)4.1主要技术指标 (18)第一章上位机遥控箱介绍1.1面板介绍总电源开关:通过该开关控制排爆箱总电源的开和关。
电脑启动按钮:通过该按钮来启动和关闭排爆箱电脑。
有线无线开关:通过该开关来切换排爆机器人为有线或无线控制方式。
紧停旋钮:通过选择紧停按钮来停止和恢复下位机运行。
手控制摇杆:控制机械臂手末端运动。
车控制摇杆:控制车体行进转向。
1.2界面介绍清错、配置及模式切换区域:进行异常处理、机器人上下使能、机器人暂停、急停及复位和模式切换。
视频切换区域:进行视频显示控制。
云台控制区域:进行云台运动控制。
报警错误及消息提示区域:实时显示下位机当前错误信息。
指示灯区域:显示网络通讯、使能、错误和抱闸状态信息。
机器人模型显示区域:通过机器人模型实时显示机器人摆臂及机械臂位置。
FC18-操作手册
FC18-操作手册JB-TGZL-FC18R 型火灾报警控制器(联动型)操作说明书目录第一章 系统简介···········································································································································3 1. 特点 ·····················································································································································3 2. 性能参数················································································································································4 3. 外形尺寸················································································································································5 4. 兼容设备目录··········································································································································5 5. 系统结构················································································································································6第二章 安 装··············································································································································8 1. 安装过程················································································································································8 2. 接线图···················································································································································9 3. 拨码开关设置········································································································································13第三章 操 作·············································································································································14 1. 界面显示··············································································································································14 2. 液晶窗口显示········································································································································16 3. 用户级别··············································································································································18 3.1 登录 ··············································································································································19 3.2 退出 ··············································································································································19 4. 状态类型··············································································································································20 5. 火警事件处理········································································································································22 6. 故障事件处理········································································································································23 7. 监管事件处理········································································································································24 8. 启动/反馈事件处理·································································································································25 9. 实时事件查询········································································································································26 10. 设备属性查询········································································································································27 11. 历史记录查询········································································································································28 12. 如何进行屏蔽/开放·································································································································29 13. 如何进行启动/停止·································································································································30 14. 如何进行测试/移动测试···························································································································31 15. 如何进行定位测试/定位恢复·····················································································································32 16. 如何设置蜂鸣器音量·······························································································································33 17. 如何设置登录时间··································································································································34 18. 如何设置移动测试时间····························································································································35 19. 如何设置 LCD 关闭时间 ··························································································································36 20. 如何设置时间········································································································································37 21. 如何进行系统检测··································································································································38 22. 如何保存配置········································································································································39 23. 如何修改参数········································································································································40 24. 如何新建/查看联动关系···························································································································41 25. 如何编辑/删除联动关系···························································································································42 26. 如何进行组分配/FRT 分配 ·······················································································································44 27. 如何查看帮助信息··································································································································45 28. 如何操作联动盘·····································································································································45 29. 如何打开/关闭打印机······························································································································46 30. 如何替换设备········································································································································48页码:1/60。
如果你是消防大队指导员请编写消防机器人操作手册
如果你是消防大队指导员请编写消防机器人操作手册
1、红外摄像头:观察机器人本体周围的环境,实现路画面(车体前、后、水炮喷射口、车体云台)无线图像传输功能。
2、消防水炮:80L每秒流量水炮,水、泡沫两用,射程75m。
3、气体采集(选配):机器人本体周围五种气体的采集(O2、CO、H2S、C12、CH4)。
4、照明:LED大功率强光照明灯。
5、声光报警:机器人本体运行状态下发出声光报警。
6、自动避障:在行进时时时检测前方障碍物,避免碰撞。
7、喷淋降温:双重水幕喷淋降温。
8、可实时的显示机器人本体电池内部的各种信息;实时显示机器人状态、机器人内外温度、有毒有害气体浓度报警信息等;控制机器人前进、后退、转向等运动;控制水炮做上、下、左、右、直流、雾化、自摆动等动作。
排爆机器人
排爆机器人品牌:浦喆排爆机器人主要是用来处理爆炸物相关工作的排爆式机器人,也可用于侦察人难以达到的地形的一种机器人。
6自由度排爆机械手能实现任意角度旋转,可以抓举30KG的重物,机械臂装载爆炸物销毁器,可现场摧毁爆炸物,底盘采用履带结构,能适应各种地形快速作战部署。
排爆机器人可与多种配件一同使用,包括销毁器,X射线,爆炸物的远程引爆控制系统等。
机器人主体参数:1、摄像头像素:1080P2、抓举力:最大≦30Kg。
展开抓取≤10kg3、排爆弹外径:29mm4、轮胎直径:320mm5、爬坡能力:≤30°6、爬楼梯能力:≤30°7、越障高度:300mm8、最大速度:≥1.4m/s9、转弯半径:原地旋转10、有线控制:100m11、无线控制:500m12、尺寸:1200*1030*1000mm(包含云台)13、重量:220KG14、电压:48V15、工作时间:≥12h机械臂参数1、主臂旋转:0-90°2、主臂伸缩:0-450mm3、小臂:-90°-120°4、底座:左90°右60°5、爪转:360°(连续)6、爪张合尺寸:0-245mm爆炸物销毁器(选配):1、重量:3.2KG2、发射器外径:53mm3、发射器口径:22mm4、击穿能力:木板70mm;钢板3mmX光机参数(选配)1、成像板外形尺寸:383mmx480mmx15mm2、成像板厚度小于:15mm3、成像板重量小于:3.2kg4、像素尺寸小于:160μm5、射线源尺寸:310mmx50mm6、X 射线穿透力:可穿透50mm 铝板。
7、光源:光源有线和无线控制8、同步方式:手动控制(13)有线通信:兼容百兆、千兆以太网. 系统组成:MK6排爆机器人 1台遥控箱 1台车体充电器(54.6.2V) 1个遥控充电器(12.6V) 1个有线通讯电缆 1卷。
多功能模块化排爆机器人设计使用说明
第一届xxx机械创新设计大赛作品说明书多功能模块化排爆机器人参赛学校xxxx参赛学员 xxxx指导教员 xxxx摘要:地面无人作战平台在现代战争中已经开始扮演着重要的角色,国内外都在对此进行研究。
本文依据自主设计并制作的多功能模块化排爆机器人(样机)和相关的战场适应性能试验,主要研究了模块化设计理念在我军未来无人作战装备中的具体实现方案和采用模块化理念设计的无人作战平台对战场、战争环境的适应性。
为未来我军无人化装备的设计和生产提供了有益的借鉴。
关键词:模块化、多功能、排爆、机器人、无人化一、设计背景目前国内外恐怖主义猖獗,活动类型多样,在很多地区还存在着大量恐怖分子遗留的爆炸物。
由于人工排爆存在巨大危险性,排爆机器人已成为反恐作战的重要装备之一。
在国外,美军提出并实施了“联合机器人计划”(JRP),国防高级研究计划局提出了“战术移动机器人”(TMR)、“未来战斗系统”(FCS)、无人地面战车等项目,目前有100多项战斗任务可由机器人承担,如机器人弹药装填手、机器人排雷车、火力支援机器人等。
美、英、德、法及日本等国均已经研制出多种型号的地面无人作战平台,有的已在波黑战争和伊拉克战争中使用。
除上述国家外,其他国家也在开展地面无人作战平台的研制工作,如加拿大的“改进型地雷探测计划”,意大利、法国和西班牙联合开展的“先进移动机器人”项目,瑞士的Pemex轮式地面无人平台项目,比利时的HUDEM项目,西班牙的“罗德”轮式地面无人平台以及俄罗斯的“越野车”-M3超轻型移动式机器人等。
排爆机器人是目前较具研究价值的机器人产品,在反恐怖斗争领域可用来执行诸如反恐排爆的任务,战场上排爆机器人则用以执行诸如排除爆炸物,战场信息收集的任务;稍加改造,即可加装单兵武器用于武装巡逻、战斗值勤等高危险任务。
基于军用机器人产品系列化、通用化的需要,在小型移动平台基础上,提出并制作了多功能模块化排爆机器人,其包括履带式底盘、机械手臂、控制系统、侦察系统等,集模块化、多功能、自动控制于一体,可用于各种复杂、危险情况下的可疑危险物品的清理作业,以及代替现场安检人员实地勘察,实时传输现场图像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SDHT-18型排爆机器人
使
用
说
明
书
北京斯达恒通科技有限公司----------------------------------------------
中国*北京
名称:18型排爆机器人
品牌:斯达恒通
一、产品概述:
ZSG-18型排爆机器人结构由行走机器人主体及控制系统组成。
行走机器人主体由箱体、电机、驱动系统、机械臂、云台支架、监视系统、照明灯、爆炸物销毁器底座、充电电池、牵引环等组成。
机械臂由大臂、伸缩臂、小臂、机械手抓组成,机械臂安装在腰盘上,腰盘直径220mm,大臂上安装有双电动撑杆和双气动撑杆;云台支架可折叠,其上安装有气动撑杆、摄像机、天线;监视系统由摄像机、监视器、天线等组成;在主体前、后部各安装有1组LED照明灯;系统使用DC24V 铅酸充电电池供电;控制系统由中央控制系统、控制箱等组成。
排爆机器人可选装配件:爆炸物销毁器、尾翼、无线发射天线、五金工具(含刀具、钩子、耙子、钻头、剪子)。
排爆机器人折叠后外形尺寸:宽650mm*长910mm(不含尾翼)*高500mm。
排爆机器人质量为:90kg(不含附件、包装、控制箱)。
二、应用环境
公共场所(地铁、机场、火车站、商场、会议中心等)可疑物品转移、销毁。
哑弹排除、路边炸弹排除、地雷排除等应用环境。
危险生化及有毒环境内物品抓取、转移。
灾后废墟环境内侦察、探测,物品抓取、转移。
核辐射环境内物品抓取、转移,简单探测、维修作业。
三、技术参数
1 移动速
度检验
排爆机器人最高移动速度≥1.5m/s
2 爬坡能
力检验
在与水平面夹角为45°的斜坡上,
操纵排爆机器人爬至坡顶;将爬坡
行走中的排爆机器人在中间任意位
置停机1次,机器人能稳定在坡面
上。
3 爬楼梯
能力检
验
排爆机器人无需外力辅助爬上、爬
下角度为45°楼梯。
4 平地越
过障碍
检验
在水平面上横向放置截面
320mm*320mm、长度>800mm木方或
水泥方,操控排爆机器人能越过
5 通行宽
度检验
排爆机器人可通过宽度≤700mm的
路面
6 回转性
能检验
在水平水泥或沥青上,操纵机器人
可原地左右回转各360°
7 负载能
力检验
机器人负载能力≥140kg
8 拖拽能
力检验
排爆机器人拖拽能力不小于500N
9 手抓张
开尺寸
机械手手爪最大张开尺寸不小于
250mm
检验
1 0 举重能
力检验
操纵机械手夹紧质量≥40kg的试
样,然后启动机械手各关节的驱动
装置,手爪可达空间任意位置试样
不松动
1 1 机械手
自由度
检验
机械手自由度数量≥6
1 2 垂直高
度检验
机械臂垂直展开后至地面距离≥
1950mm
1 3 机械臂
旋转角
度及伸
缩长度
检验
排爆机器人机械臂手爪能顺时针、
逆时针旋转360°、小臂应可顺时针
旋转150°、逆时针旋转110°,中
臂伸缩应长度不小于450mm,大臂应
可顺时针、逆时针旋转90°,腰盘
应能逆时针旋转45°、顺时针旋转
180°
1 4 摄像机
检验
排爆机器人上安装有不同位置的监
视摄像机,摄像机图像应能实时传
输至监视器,图像无延时
1 5 照明灯
检验
排爆机器人机体上有工作照明灯
1 6 控制距
离检验
排爆机器人在无遮挡的空旷地区工
作时,无线控制距离不小于150米;
排爆机器人的有线控制距离不小于100m
1 7 控制箱
检验
操纵控制箱的按键和手柄能便捷、
准确的控制视频切换/变焦、行走、
云台旋转、灯光、中臂伸缩、手爪
开合、小臂旋转动作、大臂起落、
腰盘旋转、手腕旋转等功能,且控
制系统配备触摸屏,适合初学者使
用。
《北京斯达恒通科技有限公司》
主营产品:环境安全检测仪器、消防救护破拆装备、应急救援器材、食品安全检测仪器、通风测绘仪表、粉尘测量及效验仪器、堵漏器材、安防安检防护器材等,已广泛应用于煤矿、救护队、石油化工、学校、实验室、建筑、交通、民航、物流、政府机构,以及各种厂矿企业。