人形机器人编辑器说明书v2.0
机器人可编程动作说明书

机器人可编程动作说明书一、简介本说明书为机器人的可编程动作指南,旨在帮助用户了解机器人的动作程序以及如何进行编程。
通过按照以下步骤执行编程,用户可以使机器人实现各种不同的动作。
二、动作编程步骤以下是机器人动作编程的基本步骤:1. 创建动作程序首先,打开机器人控制软件,并选择“新建动作程序”选项。
在新建的动作程序中,用户可以为机器人定义一个独特的名称,并开始编写机器人的动作。
2. 选择动作在动作程序中,用户可以选择机器人现有的基本动作,如行走、伸展、旋转等。
每个动作都会有一个对应的编号和名称,用户可以根据需求选择适当的动作。
3. 参数调整对于每个选择的动作,用户可以根据需要进行参数的调整。
例如,可以调整机器人的速度、幅度、角度等参数,以适应不同的场景和要求。
4. 组合动作除了使用单个动作外,用户还可以将多个动作组合在一起,形成一个完整的动作序列。
通过添加、删除和调整顺序,用户可以定制机器人的动作序列,并实现更加复杂的动作表演。
5. 添加条件控制对于特殊需要,用户还可以通过添加条件控制来精确控制机器人的动作。
条件控制可以根据外部传感器的信号或用户的指令,使机器人按照特定的条件执行相应的动作。
6. 调试和测试在完成动作程序的编写之后,用户可以通过调试和测试来验证程序的有效性。
用户可以选择在虚拟环境中进行测试,或将动作程序上传到机器人设备上进行实际执行。
7. 保存和使用一旦动作程序经过测试没有问题,用户可以将其保存,并在需要时随时加载和使用。
用户还可以将动作程序导出为文件,以便与其他用户共享和交流。
三、常见问题解答以下是一些常见问题的解答,可以帮助用户更好地理解和应用机器人的可编程动作功能:1. 动作程序是否可以重复使用?是的,一旦用户创建并保存了动作程序,可以随时重新加载和使用。
用户还可以根据需要对动作程序进行修改和优化。
2. 是否可以同时执行多个动作程序?是的,机器人可以同时执行多个动作程序,并按照设定的顺序逐个进行。
2023年家用机器人操作与维护使用说明书

2023年家用机器人操作与维护使用说明书使用说明书2023年家用机器人操作与维护一、机器人简介2023年家用机器人是一款智能家居助手,具备多种功能和特性,能够为您提供便捷的家庭生活服务。
本使用说明书将详细介绍机器人的操作方法和维护要点,以帮助您充分了解和使用本机器人。
二、安全须知1. 在使用机器人之前,请仔细阅读本使用说明书,并按照说明操作。
2. 请确保机器人周围的环境安全,避免机器人碰撞到家具、墙壁等物体。
3. 请勿将机器人暴露在高温、潮湿或有明火的环境中,以免损坏机器人。
4. 儿童在使用机器人时,应在成人监护下进行操作,避免安全事故发生。
三、操作指南1. 启动机器人按下机器人上的电源按钮,待机器人完成自检后,即可启动。
2. 语音交互与机器人进行语音交互,可以使用指令控制机器人的行动,例如: - "机器人,打开窗帘":机器人将协助您打开窗帘。
- "机器人,播放音乐":机器人将为您播放您喜爱的音乐。
- "机器人,帮我查天气":机器人将为您查询当天的天气情况。
3. 家务协助机器人具备清扫、烹饪、洗衣等家务助手功能,您可以通过语音指令或通过手机App进行操作。
4. 安防监控机器人配备智能摄像头和传感器,可以实时监控您的家庭安全状况,并在发现异常时及时通知您。
四、维护指南1. 保持清洁定期清洁机器人的表面和传感器,避免灰尘和污渍影响机器人的正常运行。
2. 更新软件定期更新机器人的软件版本,以获得更好的功能和用户体验。
3. 充电与电池管理当机器人电池电量低时,将其连接至充电器进行充电。
请勿长时间让机器人处于低电量状态,以免影响电池寿命。
4. 故障排除当机器人出现故障或异常时,请先检查是否符合使用条件,并尝试重新启动机器人。
若问题仍未解决,请联系售后服务中心。
五、注意事项1. 本机器人仅适用于家庭环境,禁止将其用于商业、非法等其他领域。
2. 请勿将机器人浸泡于水中,以免发生电气故障。
机器人示教器操作说明
—-可编辑修改,可打印——别找了你想要的都有!精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务——全力满足教学需求,真实规划教学环节最新全面教学资源,打造完美教学模式一.示教操作盘面板介绍示教操作盘是主管应用工具软件与用户之间的接口的操作装置。
示教操作盘经由电缆与控制装置内部的主CPU印刷电路板和机器人控制印刷电路板连接。
示教操作盘在进行如下操作时使用。
●机器人的JOG进给●程序创建●程序的测试执行●操作执行●状态确认示教操作盘由如下构件构成。
●横向40字符、纵向16行的液晶画面显示屏●61个键控开关●示教操作盘有效开关●Deadman开关●急停按钮1.示教操作盘有效开关在盘左上角,如右图所示:其将示教操作盘置于有效状态。
示教操作盘处在无效状态下,不能进行JOG进给、程序创建和测试执行等操作。
2.Deadman开关在盘背面,如右图所示两黄色键:示教操作盘处在有效状态下松开此开关时,机器人将进入急停状态。
3.急停按钮在盘右上角,如右图所示红色键:不管示教操作盘有效开关的状态如何,都会使执行中的程序停止,机器人伺服电源被切断,使得机器人进入急停状态。
示教操作盘的键控开关,由如下开关构成。
●与菜单相关的键控开关●与JOG相关的键控开关●与执行相关的键控开关●与编辑相关的键控开关1.与菜单相关的键控开关:1.)、、、、功能( F )键,用来选择液晶画面最下行的功能键菜单。
2.)翻页键将功能键菜单切换到下一页。
3.)、MENU(画面选择)键,按下,显示出画面菜单。
FCTN(辅助)键用来显示辅助菜单。
4.)、、、、、、、、SELECT(一览)键用来显示程序一览画面。
EDIT(编辑)键用来显示程序编辑画面。
DATA(数据)键用来显示寄存器等数据画面。
OTF键用来显示焊接微调整画面。
STATUS(状态显示)键用来显示状态画面。
I/O(输入/输出)键用来显示I/O画面。
POSN(位置显示)键用来显示当前位置画面。
智能机器人软件使用说明书

图形化编程平台Robot精简版使用手册紫光机器人编程软件Robot精简版采用流程图模式编程。
流程图由基本模块来构建,基本模块包括输出执行模块、信号输入模块、流程控制模块三部分,每一个图形模块都可以完成一定的功能,只要按逻辑连接这些模块可以很快的完成一个程序的编写,通过画流程图的方式,实现对某一特定机器人的编程。
从而使机器人根据周围的环境执行相应的动作,如:前进、后退、拐弯、加速、减速等。
流程图支持全局变量、简单表达式、复合条件判断、循环等。
软件采用了面向对象的程序设计方法,每种控件作为一个类对象,描述了此控件的类型、位置、连接属性、节点的设置属性等信息以及对各种属性改变的方法。
利用这些方法,可以方便的对每个节点对象的属性更新和对象位置的移动等各种操作。
软件特点:☆ 图形化编程,直观、易于学习和操作;☆ 编辑、编译、程序下载到主控芯片的集成开发环境;☆ 屏蔽软硬件接口部分,降低偏向于硬件的嵌入式系统开发难度;☆ 可扩展性强。
Robot精简版软件使用说明一、软件安装:二、启动程序:首先,点击“开始”→“程序”→“南京紫光教育机器人开发平台”→“Robot PC精简版本”。
出现如下界面:大约5秒钟左右,程序界面跳转,进入软件界面,如下图(在出现上图后,点击此图,可迅速进入软件界面,无需等待)。
三、新建程序:点击“文件”→“ 新建”(如下左图)或直接点击工具栏上的“新建”图标(下右图),创建一个新程序。
界面转换进入程序编写,各区域功能如下图所示。
四、系统设置:系统设置包括传感器设置和串口设置。
串口的设置用于程序的下载,请正切选择与下载线连接的电脑串口号。
传感器设置用于配置通道号和传感器的对应关系。
编程中如需使用传感器,必须首先在系统设置中设置相应传感器的通道和类型。
五、加载图形控件:首先从控件库中选择所要的控件类型,然后单击所要使用的某个控件,此时鼠标将变成一个“+”形状,然后在工作区单击就可以生成一个该控件类型的节点,同时在其下方显示一个红色的小方框,表示另一个节点可以和它相连,当一个节点移动到它附近(上或下)时,就可以将他们连接起来(连线不需要用户自己画,而由程序自动生成并调整他们的相对位置),如图所示。
机器人软件升级的说明书
机器人软件升级的说明书尊敬的用户:感谢您选择使用我们的机器人软件,并允许我们为您提供最优质的服务。
为了提升用户体验和优化机器人的功能,我们将对软件进行升级。
本说明书将介绍升级的详细内容以及操作步骤。
请您仔细阅读以下内容,以确保您能顺利完成升级。
1. 升级内容本次升级主要包括以下几方面的改进:- 新增功能:我们将为机器人软件添加一些全新的功能,如语音识别、人脸识别等,以更好地满足用户的需求。
- 优化性能:通过改进算法和增加运算能力,提升机器人软件的响应速度和处理能力,使其更加智能高效。
- 修复bug:我们将修复软件中已知的一些问题和漏洞,以增强软件的稳定性和安全性。
2. 升级步骤为确保升级的顺利进行,请您按照以下步骤进行操作:步骤一:准备工作在开始升级之前,请确保机器人已连接至稳定的网络,以便能顺利下载和安装升级包。
步骤二:升级操作打开机器人软件,在主界面上找到“设置”选项,点击进入设置页面。
在设置页面中,找到“软件升级”选项,点击进入升级页面。
在升级页面中,系统会自动检测是否有新的升级包。
如果检测到有新的升级包可用,您将看到一个“确认升级”按钮。
点击“确认升级”按钮,系统将自动下载升级包,并开始升级过程。
请耐心等待升级完成,升级过程中请不要关闭软件和断开网络连接。
一旦升级完成,您将收到升级成功的提示。
步骤三:功能体验升级完成后,您可以开始体验新功能以及改进后的性能。
如发现任何问题或有任何建议,请及时联系我们的客服团队。
3. 注意事项- 在升级过程中,请确保机器人的电池电量充足,以免因电量不足而影响升级的正常进行。
- 如在升级过程中遇到任何问题,请勿擅自进行操作,而是及时联系我们的客服团队寻求帮助。
- 在升级完成后,若发现任何异常状况或软件运行不稳定,请及时与我们联系,我们将尽快为您解决问题。
希望通过本次升级,我们的机器人软件能够为您提供更加智能、便捷的使用体验。
如有任何疑问或建议,请随时与我们联系。
Nikki 护理人形机器人产品说明书
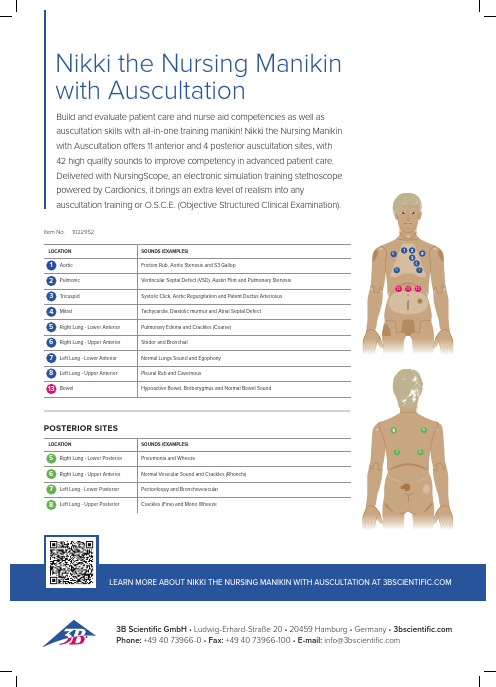
POSTERIOR SITES
LOCATION
5 Right Lung - Lower Posterior 6 Right Lung - Upper Anterior 7 Left Lung - Lower Posterior 8 Left Lung - Upper Posterior
SOUNDS EXAMPLES Pneumonia and Wheeze Normal Vesicular Sound and Crackles (Rhonchi) Pectoriloquy and Bronchovesicular Crackles (Fine) and Mono Wheeze
SOUNDS EXAMPLES Friction Rub, Aortic Stenosis and S3 Gallop Ventricular Septal Defect (VSD), Austin Flint and Pulmonary Stenosis Systolic Click, Aortic Regurgitation and Patent Ductus Arteriosus Tachycardia, Diastolic murmur and Atrial Septal Defect Pulmonary Edema and Crackles (Coarse) Stridor and Bronchial Normal Lungs Sound and Egophony Pleural Rub and Cavernous Hypoactive Bowel, Borborygmus and Normal Bowel Sound
Item No. 1022952
LOCATION
1 Aortic 2 Pulmonic 3 Tricuspid 4 Mitral 5 Right Lung - Lower Anterior 6 Right Lung - Upper Anterior 7 Left Lung - Lower Anterior 8 Left Lung - Upper Anterior 13 Bowel
XXX机器人基本操作说明书(3)
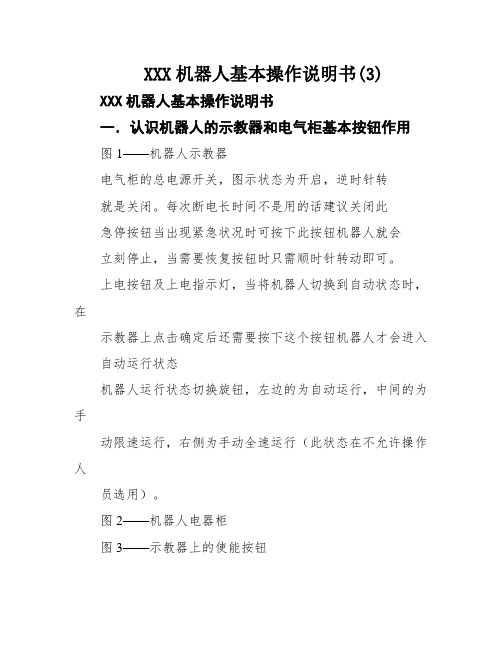
XXX机器人基本操作说明书(3) XXX机器人基本操作说明书一.认识机器人的示教器和电气柜基本按钮作用图1——机器人示教器电气柜的总电源开关,图示状态为开启,逆时针转就是关闭。
每次断电长时间不是用的话建议关闭此急停按钮当出现紧急状况时可按下此按钮机器人就会立刻停止,当需要恢复按钮时只需顺时针转动即可。
上电按钮及上电指示灯,当将机器人切换到自动状态时,在示教器上点击确定后还需要按下这个按钮机器人才会进入自动运行状态机器人运行状态切换旋钮,左边的为自动运行,中间的为手动限速运行,右侧为手动全速运行(此状态在不允许操作人员选用)。
图2——机器人电器柜图3——示教器上的使能按钮这个示教器侧面的使能按钮是在手动示教时需求机器人动作时要一直按住的。
它有三个档分别对应:不握住、适当力度握住、大力握住。
其中只有在适当力度握住时才会起作用,此时电器柜上的上电指示灯会常亮,否则会是闪灼状态。
图4——示教器的正确握法示教器界面上操作人员需要用到的几个按钮紧急停止按钮,同图2示教器旋钮切换到线性或重定位状态(回原点必须用线性)切换到单轴运动时在1-3轴和4-6轴间来回切换增量开关按钮手动操作时一定要打开增量手动运行步伐时这些按钮分别为上一步、下一步、暂停、自动运行。
图5——示教器按钮界面右下角指示的寄义线性增量开1-3轴增量开4-6轴增量开重定位增量开增量开增量关图6——示教器右下角图示如何选择工具坐标工件坐标1、翻开手动操作界面如下2、点击坐标系3、选择要用的坐标点击确认若何调解增量大小和手动状态下的机器人速度1、点击下图箭头标志处2、点击箭头处设置增量大小3、点击箭头处进行手动运行速度设置如何进入想要调试的程序1、翻开步伐编辑器2、点击调试选择pp移至例行步伐3、选择需求进入的步伐然后确认机器人意外停止后如何回原点1、机器人打得手动状态。
2、打开增量选择合适的增量大小(建议选择中),再打开手动运行速度选项选择25%。
塔米机器人116EM 用户手册V0.2
危险 操作时注意安全。 错误组装,机器人将不能正常工作甚至损坏。
警告
远离小孩。在无人照看的情况下,可能会对小孩造成伤害。 如有异常,请立即关闭电源。如电池破裂,暴露在液体,火或其他热源面前,可能导致电击。 不要拆开或修改充电器和其电缆。 当不充电时,请把充电器从电源上拔下。 不要拆卸或修改电机里面的电路板。 不要在热,潮湿或寒冷的环境下使用,因为该产品包含精密的元件。如果处在一个极端的条 件下,可能工作异常。
注意 紧急处理
电池处理:不要拆开或修改电池的连接或更改连线。 不要让物体进入电池接头,或导体裸露。 不要在高温和极端的环境下使用,把电池置于阴凉,干燥的环境中。 在运输或存储时,让电池远离其他导体。 当电池的导线变破旧或磨损时,请更换电池。 如果电池造破坏导致电解材料溅到皮肤上或眼睛里,立即用水冲洗皮 肤或眼睛。如果 电解材料溅到眼睛里面,请尽快就医。 电池里的电解材料是有毒物质,可能对人和家庭环境、家具等造成污染和危害。 如果 NiMH 不能充电,请按照垃圾的处理方法或本国家的规则妥善处理;不要通过焚烧来 处理报废的电池。
116EM(Metal-Fighter)
——人形机器人用户手册
(版本 0.1)
塔米智能科技(北京)有限公司 (科教事业部)
116EM(Metal-Fighter)人形机器人
目录
目录 ........................................................................................................................................................1 前 言 ....................................................................................................................................................2 1.产品介绍 .....................................................................................................................................................3 1.1 116EM(Metal-Fighter)简介......................................................................................................3 1.2 产品规格 .......................................................................................................................................3 1.3 性能参数 .......................................................................................................................................3 1.4 技术参数 .......................................................................................................................................3 2 产品特点 ....................................................................................................................................................4 2.1 容易组装 .......................................................................................................................................4 2.2 伺服电机 .....................................................................................................................ห้องสมุดไป่ตู้.................4 2.3 控制板 MR-C3024 .......................................................................................................................5 2.4 金属框架 .......................................................................................................................................7 2.5 电池和充电 ...................................................................................................................................7 2.6 关键——容易操纵........................................................................................................................7 3 PC 端的开发配置 PC 软件安装.............................................................................................................7 3.1 RoboScript 介绍 ...........................................................................................................................8 3.2 RoboBasic 介绍 ............................................................................................................................9 3.2.1 启动 roboBasic 软件 .....................................................................................................................9 3.2.2 “欢呼”程序基本程序逻辑.....................................................................................................10 3.2.3 新建程序文件,添加初始化代码:.......................................................................................11 3.2.4 添加 MAIN 程序端: ..............................................................................................................11 3.2.5 添加 cheer_up 段,表示欢呼动作 ..........................................................................................12 3.2.6 添加“standard_pos”段,执行标准位姿动态。....................................................................12 3.2.7 编译下载 ....................................................................................................................................13
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
人形机器人编辑器使用说明书
目录
一、软件说明 (3)
二、软件安装 (4)
三、功能概述 (8)
1、主界面 (8)
2、上方工具栏 (9)
3、左侧工具栏 (9)
4、右键菜单 (10)
四、基本操作 (14)
一、软件说明
人形机器人编程软件针对使用了51STC 芯片(产品型号SHPCB-35F-5V )的控制板的图形化编程软件,该软件需要最固件的支持。
软件环境: Windows XP 及以上操作系统,针对Silverlight 的.net Framework 3.5 版本以上的支持;硬件环境: Intel P4 以上级别CPU ;512MB 以上内存;70MB 空闲硬盘空间。
二、软件安装
1、解压缩安装光盘中的“人形机器人图形编缉器.rar”文件并运行压缩文件中的包
Setup.exe 。
2、运行Setup.exe 文件,如图
点击”下一步”
点击”下一步”
如果是WIN7系统,则进入如下界面;若是XP系统,会进入.net安装界面,按照提示进行安装即可,安装完.net后也会进入如下界面。
若想更改安装目录则点击”更改”按钮,在弹出的对框中选择软件要安装的目录,再点”下一步”
点击”下一步”
点击”下一步”,软件自行安装
点击”完成”即可完成软件的安装。
3、安装完成后会在开始菜单中生成“机器人编辑器”文件夹,用户可选择
“WPFRobotX”启动程序。
应用程序启动位置
三、功能概述
1、主界面
主界面
如图所示,主界面分为四个功能区:工作区、工作区缩略图、上方工具栏展开按钮和左侧工具栏展开按钮。
工作区:展示用户于某一位置上编辑的动作。
工作区缩略图:展示工作区的缩略图。
上方工具栏展开按钮:展开/关闭上方工具栏。
左侧工具栏展开按钮:展开/关闭左侧工具栏。
2、上方工具栏
工具栏中包含了与文件操作以及在线调试相关的功能按钮,外观如下:
如图所示上方工具栏所包含按钮自左至右依次为:新建shr 文件按钮、打开shr 文件按钮、保存shr 文件按钮、连接机器人按钮、断开连接按钮、下载数据按钮、上传数据按钮、设置初始位置按钮、擦除数据按钮以及设置编号按钮。
新建shr 文件按钮:新建shr 文件,这个操作会清除当前工作区的全部内容。
打开shr 文件按钮:打开shr 文件,并将动作数据展示到工作区。
保存shr 文件按钮:保存工作区当前内容为shr 文件。
连接机器人按钮:建立与机器人的连接,联接完成后可以使用其它联机功能。
断开连接按钮:断开与机器人的连接,断开连接后不可使用联机功能。
下载数据按钮:联机状态下将动作数据下载到机器人中。
上传数据按钮:联机状态下将机器人保存的动作数据全部上传到编辑器。
擦除数据按钮:联机状态下擦除机器人全部动作数据。
设置编号按钮:联机状态下为机器人设置编号*。
*: 编号设置是针对机器人在集体舞蹈中的编号进行设置的功能。
3、左侧工具栏
左侧工具栏包含了与动作数据编辑相关的功能按钮,外观如下:
左侧工具栏
添加动作块按钮:在工作区添加一个未编辑的动作块。
添加循环块按钮:在工作区添加一个未编辑的循环块。
添加连接线按钮:单击按钮后点击任意两个数据块可将两个数据块连接起来。
按键设置:设置与遥控器对应的按键。
4、右键菜单
在工作区内单击右键会打开右键菜单,如图所示:
菜单工作区右键:
动作块右键菜单:
循环块右键菜单:
循环内动作块右键菜单:
右键菜单具有如下功能:设为开始、设置循环次数、编辑动作、添加动作、添加循环、添加特殊动作、删除模块、连接模块、清除连接、复制和粘贴。
设为开始:将动作块设为开始动作块,程序将从开始动作块执行,没有开始动作块的程序将不被编译保存。
开始动作块
设置循环次数:打开循环设置窗口,设置循环块的循环次数。
循环设置窗
编辑动作:打开动作编辑窗口,编辑动作块数据。
动作编辑窗
添加动作:在指针当前位置添加动作块。
添加循环:在指针当前位置添加循环块。
添加特殊动作:在指针当前位置添加特殊动作块*。
删除模块:删除指针所指模块。
连接模块:开始从当前模块进行连接模块的操作。
清除连接:清除指针所指模块的全部连接线。
复制:复制当前所选一个或多个模块。
粘贴:粘贴复制过的一个或多个模块。
四、基本操作
连接模块通过添加连接线按钮连接,点击左侧工具栏的添加连接线按钮后,在想要连接的源模块上按住鼠标左键,将连接线拖拽到目标模块上后,松开左键完成连接。
通过右键菜单连接模块功能连接在工作区任意位置单击右键,打开右键菜单,选择“连接模快”,在想要连接的源模块上按住鼠标左键,将连接线拖拽到目标模块上后,松开左键完成连接。
编辑循环块添加循环块内动作将工作区内的动作块拖拽到循环块中即可将其添加入循环块内,未编辑过的动作块在编译的时候不会被保留下来。
移除循环块内动作将循环块内动作拖拽出循环块或通过右键菜单中的“删除模块”项都可以将循环块内的动作块移除。
设置循环次数单击循环块上的设置循环按钮,或右键点击循环块,在弹出的菜单中选择“设置循环次数”,打开设置循环窗口进行设置。
五、实例操作
使用该软件需要将固件程序(*.hex),烧写到机器人控制器中,所在机器人在出货
前均已烧写些程序,也可自行烧写(慎用!),方法请参考程序烧写说明书或其视频说明。
使用此软件需要PC机带串口,如使用笔记本则需要USB转TTL/RS232模块(此模块需要安装驱动程序),具体硬件连接及驱动程序安装请参考机器人说明书。
正确连接机器人,保持机器人电源处于关闭状态,并要将机器人模式开关设成
图形化运行模式。
开始菜单中找到“机器人编辑器”文件夹,选择“WPFRobotX”
启动程序,
点击“上方工具栏展开按钮“
显示出上方工具栏内容,点击“连接机器人按钮”
弹出选择端口对话框如下图
在列表中选择端口号(),点击“连接”按钮,然后马上打开机器人电源,机器人蜂鸣器连续两声,等待2-3秒,若机器人连续响三声说明软件没有和机器人连接上, 这时需要点击“取消”按钮,关闭机器人电源,得新上面的操作(在列表中选择端口号(),点击“连接”按钮,然后马上打开机器人电源)
软件出现如下界面,说明软件与机器人成功连接,此时机器人将各舵机的位置上传给软件
舵机初始位置上传完成后,软件出现如下界面, 同时机器人蜂鸣器发出响声(响一声或两声),点击“确定”按钮即可
下面来编辑机器人动作,点击“左侧工具栏展开按钮”
显示出左侧工具栏内容,选择遥控器按键号,当前选择为“1”,那么可以用遥控器1键控制要编写的动作
点击“添加动作块”按钮
在工作区会出现一个工作块,继续单击还可以添加更多的动作块,由于动作块在软件中出现的第一次出现的位置是相同的,所以添加完一个动作块后,将其移动到其它的位置,
这里依次添加四个动作块(也可以添加更好的动作块),移动将其它排好顺序,
右击最上面的动作块,选择“设为开始“
最上面的动作块出现小旗
右击带有小旗的动作块,选择“编辑动作”
弹出如下界面,然后点击“初始位置”,将第一个动作设为机器人的初始位置,再点击“确定”回到工作区
同样设置最后的动作为机器人的初始位置,然后编辑第二个动作,在弹出的界面里,点击右侧机器人关节,对应关节会变为灰色,同时左侧对应关节名称变为红色,此时滚动鼠标滚轴、点击滚动条上的箭头或点击滚动条可调整对应关节的舵机位置(不要太快,以免舵机动作幅度太大卡住舵机甚至烧坏舵机,否则后果自负),3D 图与实物机器人对应关节同时动作,方向相同,还可以调整该动作的速度和进行下一动作的间隔时间(延时),然后点击“确定”按钮。
同样设置第三个动作块。
点击左侧工具栏中的“添加连线”按钮,将两个动作块连接起来,同样将所有的动作连接起来
点击“上方工具栏展开”按钮,点击“下载动作数据”按钮
选择“从编辑器下载”,点击“下载”按钮“
编辑器将数据下载给机器人,同时机器人蜂鸣器会发出响声
下载完成后,点击“确定”按钮
点击上方工具栏中的“断开连接“按钮
关闭机器人电源,插掉下载线,重新打开机器人电源,机器人连续响两声,2-3秒后,响一声或两声,按下遥控器1键,机器人执行刚才编辑的动作。