基于麦克风阵列声源定位系统的FPGA实现
《基于麦克风阵列的声源定向系统的研究与实现》范文
《基于麦克风阵列的声源定向系统的研究与实现》篇一一、引言随着人工智能技术的飞速发展,声源定向系统在众多领域中扮演着越来越重要的角色。
麦克风阵列技术作为一种有效的声源定位手段,已广泛应用于安防监控、智能家居、机器人等领域。
本文旨在研究和实现基于麦克风阵列的声源定向系统,以提高声源定位的准确性和实时性。
二、麦克风阵列技术概述麦克风阵列是指将多个麦克风按照一定的几何布局排列,通过分析麦克风接收到的声波信号的时差、相位差和振幅差等信息,实现声源定位的技术。
根据阵列中麦克风的数量、排列方式和信号处理方法的不同,麦克风阵列技术可分为多种类型。
本文将采用常见的均匀线阵列技术进行研究和实现。
三、声源定向系统设计(一)系统架构设计基于麦克风阵列的声源定向系统主要包括信号采集、信号预处理、声源定位和结果输出四个部分。
其中,信号采集部分负责获取多个麦克风的音频信号;信号预处理部分对音频信号进行滤波、增强等处理;声源定位部分根据处理后的信号计算声源位置;结果输出部分将声源位置信息以可视化方式呈现。
(二)麦克风阵列布局与选型麦克风阵列的布局和选型对声源定位的准确性具有重要影响。
本文采用均匀线阵列布局,将多个同型号的高灵敏度麦克风按照一定间隔排列。
同时,为了降低环境噪声的干扰,选用具有较好抗噪性能的麦克风。
(三)信号处理方法针对麦克风阵列接收到的音频信号,本文采用时延估计和到达角度估计两种方法进行声源定位。
时延估计是通过对不同麦克风接收到的信号进行时间差分析,从而确定声源的方向;到达角度估计则是根据信号的相位差或振幅差计算声源的到达角度。
此外,为了进一步提高定位精度,本文还采用了多普勒效应等高级算法进行优化。
四、系统实现与实验分析(一)系统实现根据上述设计,我们开发了基于麦克风阵列的声源定向系统。
系统采用C++编程语言实现,并利用OpenCV等开源库进行图像处理和可视化展示。
同时,为了方便用户使用,我们还开发了友好的图形界面。
《基于麦克风阵列的声源定位技术研究》
《基于麦克风阵列的声源定位技术研究》一、引言随着科技的不断发展,声源定位技术在众多领域中得到了广泛的应用,如智能监控、语音交互、机器人导航等。
麦克风阵列技术作为一种有效的声源定位手段,因其能通过多个麦克风的协同作用实现高精度的声源定位,逐渐成为了研究热点。
本文将重点研究基于麦克风阵列的声源定位技术,探讨其原理、方法及应用。
二、麦克风阵列技术原理麦克风阵列是由多个麦克风按照一定的几何排列组成的系统,通过收集声波的相位差和强度差等信息,实现对声源的定位。
其基本原理包括波束形成、时延估计和到达角度估计等。
1. 波束形成波束形成是麦克风阵列技术中常用的一种方法,通过加权求和的方式将多个麦克风的信号合并成一个指向性较强的波束,从而提高信噪比并实现对声源的定向侦测。
2. 时延估计时延估计是基于声波传播速度恒定的原理,通过测量不同麦克风间接收声波的时间差,估计出声源与麦克风阵列之间的距离和方向。
3. 到达角度估计到达角度估计是利用声波的传播特性,通过分析声波到达不同麦克风的先后顺序和强度差异,估计出声源的方位角或俯仰角。
三、声源定位方法基于麦克风阵列的声源定位方法主要包括基于传统算法的方法和基于机器学习的方法。
1. 基于传统算法的方法传统算法主要包括基于时延估计的方法、基于到达角度估计的方法以及二者结合的方法。
这些方法通常需要预先设定一定的假设条件,如声源位于近场或远场等,然后通过计算和分析声波的传播特性,实现声源定位。
2. 基于机器学习的方法随着机器学习和人工智能的发展,基于机器学习的声源定位方法逐渐成为研究热点。
该方法通过训练神经网络等模型,学习声波的传播特性和环境噪声等因素对声源定位的影响,从而实现高精度的声源定位。
四、应用领域麦克风阵列的声源定位技术在众多领域中得到了广泛的应用。
1. 智能监控在智能监控系统中,通过布置麦克风阵列,可以实现对监控区域内声源的实时定位和追踪,从而提高监控效率和准确性。
2. 语音交互在语音交互系统中,麦克风阵列技术可以实现对多个说话人的识别和定位,从而实现多人都好、智能问答等功能。
毕业设计论文基于麦克风阵列的声源定位技术

毕业设计论文基于麦克风阵列的声源定位技术声源定位是指通过一定的算法和技术手段,利用麦克风阵列精确确定声源在三维空间中的位置。
在现实生活中,声源定位技术具有广泛的应用领域,如视频会议、无线通信、智能机器人等。
本文将重点研究基于麦克风阵列的声源定位技术,并探讨其原理和实现方式。
声源定位技术的核心问题是如何从麦克风阵列得到的多个音频信号中准确地估计声源的位置。
传统的声源定位方法主要依赖于声音在不同麦克风之间的时间差或幅度差来进行计算,并通过几何分析得出声源的位置。
然而,这种方法受到了环境噪声、声音衰减和多路径效应等因素的影响,导致定位结果不够准确。
为了提高声源定位的准确性和稳定性,近年来提出了一些基于信号处理和机器学习的方法。
其中,基于信号处理的方法主要通过对音频信号进行频谱分析和时频变换,提取声源的特征信息,并利用定位算法将这些信息转化为声源的位置。
这类方法通常需要对环境噪声和多路径效应进行建模和去除,以提高定位的准确性。
然而,由于环境复杂性和信号处理的复杂性,这类方法在实际应用中往往存在一定的限制。
与此同时,基于机器学习的方法也逐渐得到了广泛应用。
这类方法主要通过训练算法模型,从大量的声源位置数据中学习到声源的定位规律,并在实时定位中进行预测。
与传统的方法相比,基于机器学习的方法能够更好地适应不同环境和条件下的声源定位需求,并具有较高的准确性和稳定性。
然而,这类方法需要大量的训练数据和复杂的计算过程,对硬件设备和计算资源的要求较高。
在本文中,我们将提出一种基于麦克风阵列的声源定位方法,并探讨其实现过程和效果评估。
该方法将结合信号处理和机器学习的技术手段,通过对音频信号的预处理和特征提取,提高声源定位的准确性和稳定性。
同时,我们将设计实验并收集大量的声源位置数据,利用机器学习算法训练模型,并对其进行评估和优化。
最终,我们将在实际的应用场景中验证该方法,并与传统的方法进行对比分析。
本文的研究内容对于声源定位技术的发展和应用具有一定的指导意义。
基于麦克风相位阵列的声源定位系统设计与开发
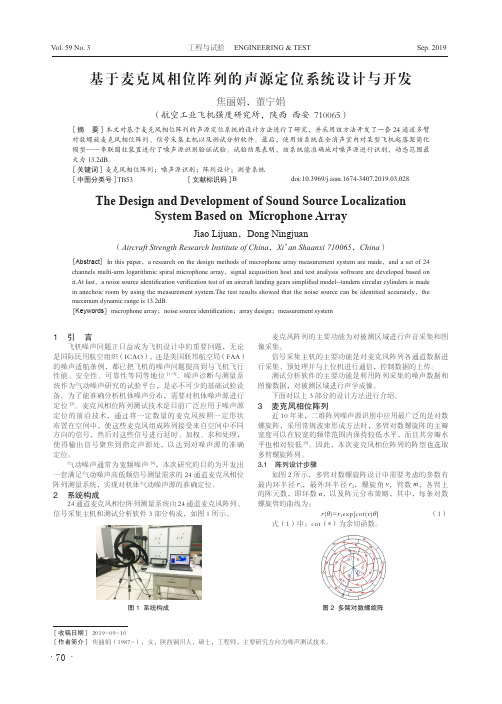
2 系统构成
24 通道麦克风相位阵列测量系统由 24 通道麦克风阵列、 信号采集主机和测试分析软件 3 部分构成,如图 1 所示。
麦克风阵列的主要功能为对被测区域进行声音采集和图
(Aircraft Strength Research Institute of China,Xi’an Shaanxi 710065,China)
[Abstract] In this paper,a research on the design methods of microphone array measurement system are made,and a set of 24 channels multi-arm logarithmic spiral microphone array,signal acquisition host and test analysis software are developed based on it.At last,a noise source identification verification test of an aircraft landing gears simplified model--tandem circular cylinders is made in anechoic room by using the measurement system.The test results showed that the noise source can be identitied accurately,the maximum dynamic range is 13.2dB. [Keywords] microphone array;noise source identification;array design;measurement system
基于麦克风阵列声源定位系统的FPGA实现

2 利用 时 延 估 计 进 行 方 位 估计 ,主 要 方 法 有 角 度距 ) 离 定位法 、球形 插值 法 、线 性插 值法 和 目标 函数 空 间 搜 索定位法 。与其他 几种方 法相 比,基 于广 义互 相关 函数 的方法 计算 量小 、计算 效率 高。优 点 明显 ,故 时 延估计 采用 此方法 。方 位估计 则采用 精度 适 中 、易 于 实现 的角度 距离定 位法 。
于这种 方法原 理简 单 ,计 算量较 小 ,且易 于实 现 ,在 声 源定位 系统 中得到 了广泛 应用 。根据 以上 介绍 ,本
1 系统 的 基本 原 理 及 流 程 图
算法 的结 构流 程 如图 1 示 ,首先 由麦 克 1和 2 所 获得说 话人 的语 音 信 号 ,再经 过 A D采 样 和 低 通 滤 / 波器 ,最 后得 到待 处理输 入语 音信 号 ,可 以分别 记 为
丧a 叶哉 2 1 第 4 第 期 0 年 2卷 4 1
Elct i i& Te h. e r c Sc. on c /Ap .1 r 5. 2 0 01
基 于 麦 克 风 阵 列 声 源 定 位 系 统 的 F GA实 现 P
任 勇 ,胡 方 明 ,李 自学
( 安 电 子科 技 大学 电子 工 程 学 院 ,陕 西 西 安 西 摘 要 707) 10 1 论述 了基 于 麦 克风 阵列 的 声 源 定 位 技 术 的基 本 原 理 ,给 出 了利 用 F G 实现 系统 各 模 块 的 设 计 方 法 。 重 PA
一种基于FPGA麦克风阵列室内声源定位系统[实用新型专利]
![一种基于FPGA麦克风阵列室内声源定位系统[实用新型专利]](https://img.taocdn.com/s3/m/301f44f59fc3d5bbfd0a79563c1ec5da50e2d61f.png)
(10)授权公告号(45)授权公告日 (21)申请号 201520691578.6(22)申请日 2015.09.09G01S 5/20(2006.01)(73)专利权人燕山大学地址066004 河北省秦皇岛市海港区河北大街438号(72)发明人吴希军 孙梦菲 杜德琴 赵彦鹏(54)实用新型名称一种基于FPGA 麦克风阵列室内声源定位系统(57)摘要本实用新型涉及一种基于FPGA 麦克风阵列室内声源定位系统,其中包括麦克风阵列结构模块、语音信号预处理、时延定位算法实现、FPGA 控制系统、摄像头五部分;六个麦克风固定在直角坐标系中组成锥形麦克风阵列,麦克风采集声音信号,经过A/D 采样和带通滤波,生成六路待处理的输入语音信号,用广义互相关算法完成每一坐标轴上的一对麦克风采集语音信号的时延估计,得到3对麦克风的时延后由六元麦克风阵列几何定位算法,可以确定声源的方位角和俯仰角,FPGA作为控制器控制摄像头的转动,使其朝向发言人的方向。
(51)Int.Cl.(19)中华人民共和国国家知识产权局(12)实用新型专利权利要求书1页 说明书2页 附图2页CN 205139359 U 2016.04.06C N 205139359U1.一种基于FPGA麦克风阵列室内声源定位系统,其特征在于:包括麦克风阵列结构模块、语音信号预处理模块、FPGA控制系统、摄像头四部分,语音信号预处理模块包括A/D转换模块和采样处理模块,麦克风阵列与A/D转换模块连接,FPGA控制系统与摄像头相连。
2.根据权利要求1所述的一种基于FPGA麦克风阵列室内声源定位系统,其特征在于:A/D转换模块与采样处理模块组成语音信号预处理模块。
3.根据权利要求1所述的一种基于FPGA麦克风阵列室内声源定位系统,其特征在于:用六个麦克风固定在三维直角坐标系中组成锥形麦克风阵列,由时延值就可得到声源位置的方位角和俯仰角。
4.根据权利要求1所述的一种基于FPGA麦克风阵列室内声源定位系统,其特征在于:FPGA作为控制器,控制摄像头转向发言人的方向。
两麦克风信号的时延估计算法研究及其在FPGA上的实现
两麦克风信号的时延估计算法研究及其在FPGA上的实现摘要在声源定位技术中,时延估计法具有计算量小、开发成本低的优点,因此得到广泛应用,但此方法大多基于DSP或DSP+FPGA实现,而此种实现方式需要大量的功耗,限制了声源定位在便携式设备中的实现。
随着FPGA的发展,基于FPGA的数字信号处理技术也快速发展。
FPGA 具有高速、并行、低功耗等优点,适合在便携式设备中进行麦克风阵列信号的处理。
本文利用Quartus II 开发环境,使用VHDL语言,设计了一对麦克风的时延估计算法。
算法中所有的操作均在时域中完成,通过波形匹配的思想,找到最匹配的偏移量,进一步得到时延估计。
利用Modelsim软件对此设计进行了功能仿真,根据对仿真结果的分析,确定了此时延估计算法的正确性,并进一步分析了此算法的抗噪能力。
最后,总结了本论文在整个声源定位系统设计中的作用及进一步工作计划。
关键词:时延估计,麦克风,声源定位,可编程门阵列Rearch of time-delay estimation between two microphonesignalsABSTRACTIn the field of sound source location, time-delay estimation is widely used as the result of its small amount of calculatioin and the low-cost development. However, this method is mostly brought about with DSP or DSP+FPGA, while calls for high power consumption. Therefore, it is rarely used in PDA Device. With the development of FPGA, the technology of digital signal processing gains rapid development. FPGA enjoys the advantage of high-speed, parallel and low power consumption, which make FPGA suitable for the processing of MIC array signal based on portable devices. In this paper, a time-delay estimation algorithm is raised which is developed with VHDL on the platform of Quartus II. All operations in this algorithm are accomplished in time-domain. By comparing two ways of MIC signal, the most matching offset can be found, which is corresponding to a certain time-delay. Function simulation is accomplished in the software of Modelsim. By analyzing the simulation result, the corretness of this algorithm is shown which can also resists noise to a certain extent. By the end, the status of the design here in the whole sound source location is presented. On that basis, next step of work is put forward.Key words:Time-delay estimation, MIC, Sound source location, FPGA目 录1 绪论 (1)1.1声源定位技术的发展 (1)1.2 基于麦克风阵列声源定位技术 (1)1.3 时延估计定位现状分析 (2)1.3.1 理论现状 (2)1.3.2 声源定位具体实现 (2)1.4 本论文主要研究内容 (3)2 FPGA技术及硬件描述语言 (5)2.1 FPGA技术概述及其优点 (5)2.2 硬件描述语言及VHDL简介 (6)2.2.1 硬件描述语言HDL (6)2.2.2 VHDL产生和发展 (6)2.2.3 VHDL基本结构和特点 (6)2.2.4 VHDL设计步骤 (6)2.3 Quartus II开发软件简介 (7)2.4 本章小结 (7)3 时延估计的总体设计方案 (8)3.1 理论模型 (8)3.2 采样分析 (8)3.3 硬件电路分析模型 (10)3.3.1存储器 (10)3.3.2偏移量分析 (10)3.3.3查表法得到时延 (11)3.4 本章小结 (11)4 具体硬件描述方案 (12)4.1 存储器ROM模块 (12)4.2 find_min_offset模块 (13)4.2.1 程序包encpack (14)4.2.2LOOP_512进程 (14)4.2.3状态机控制 (14)4.2.4 地址控制 (15)4.3 offset_to_time模块 (16)4.4 并行优化处理 (16)4.5 总体设计 (16)4.6 本章小结 (17)5 系统仿真测试及分析 (18)5.1 资源利用情况 (18)5.2 运行速度分析 (19)5.3 Modelsim简介 (19)5.4 主要测试信号简介 (20)5.5 典型语音信号输入测试 (20)5.5.1 不考虑传输衰减 (20)5.5.2 考虑传播衰减 (21)5.6 影响算法准确度的因素 (22)5.6.1 环境噪声 (22)5.6.2 房间混响 (22)5.6.3 模型噪声 (22)5.6.4 算法的抗噪能力 (23)5.7 本章小结 (23)6 总结 (25)参考文献 (26)致 谢 (28)1 绪论1.1声源定位技术的发展目前声源定位技术是利用麦克风拾取语音信号,并用数字信号处理技术对其进行分析和处理,继而确定和跟踪声源(即说话人)的空间位置。
《2024年基于麦克风阵列的声源定向系统的研究与实现》范文

《基于麦克风阵列的声源定向系统的研究与实现》篇一一、引言声源定向技术是一种用于确定声波传播方向的技术。
随着现代科技的发展,麦克风阵列技术逐渐成为声源定向系统的重要手段。
本文将详细介绍基于麦克风阵列的声源定向系统的研究背景、目的及意义,并探讨其实现方法和应用前景。
二、麦克风阵列技术概述麦克风阵列是指将多个麦克风按照一定规则排列,通过分析声波在传播过程中到达不同麦克风的相位差和强度差,实现声源定向的技术。
麦克风阵列技术具有较高的定位精度和抗干扰能力,广泛应用于语音识别、机器人听觉、安全监控等领域。
三、声源定向系统研究(一)系统架构设计基于麦克风阵列的声源定向系统主要包括信号采集、预处理、特征提取、定位算法和输出五个部分。
信号采集阶段,麦克风阵列捕捉来自各个方向的声波信号;预处理阶段,对采集到的信号进行滤波、增益控制等处理;特征提取阶段,从预处理后的信号中提取出有用的信息,如时延、强度等;定位算法阶段,根据提取的特征信息,运用合适的算法进行声源定位;最后,输出阶段将定位结果以可视化的方式呈现出来。
(二)定位算法研究定位算法是声源定向系统的核心部分。
常见的定位算法包括基于时延估计的算法、基于到达角度的算法和基于声音强度比的算法等。
本文将重点研究基于时延估计的算法,通过分析声波在不同麦克风间的传播时延,实现声源定位。
同时,针对不同场景和需求,探讨其他定位算法的适用性和优化方法。
四、系统实现(一)硬件实现硬件部分主要包括麦克风阵列、信号处理器和显示器等。
麦克风阵列采用多个高灵敏度的麦克风,按照一定规则排列,以捕捉来自各个方向的声波信号。
信号处理器对采集到的信号进行预处理和特征提取,然后将处理后的数据传输至定位算法模块。
显示器用于呈现定位结果,方便用户观察和分析。
(二)软件实现软件部分主要包括信号处理、特征提取和定位算法等模块。
信号处理模块对采集到的声波信号进行滤波、增益控制等预处理操作。
特征提取模块从预处理后的信号中提取出有用的信息,如时延、强度等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
的互功率谱平滑, 得到
72
www d ian zik e ji o rg
任勇, 等: 基于麦克风阵列声源定位系 统的 FPGA 实现
电子 电路
图 1 系统原理流程图
am12 =
C112, m = 1
am 12
1
+
C 112,
m> 1
( 3)
其中, m 表示累加平滑的帧数。
接下来 am12对求傅里叶反变换, 即可以得到麦克 1
求得 x1 ( n )和 x 2 ( n)的互功率谱为
P12 ( k ) = X 1w ( k ) X*2w ( k )
( 1)
为了减弱噪声和 混响的影响, 可以进 行频域加
权。加权后功率谱为
C12 ( k ) = 12 ( k ) P12 ( k )
( 2)
为进一步突出峰值, 在频域加权后, 可对麦克信号间
基于到达 时间 差声 源定 位算 法包 括 2 个 步骤: 1) 先进行时延估计, 从中获得传声 器阵列中相应 阵 元对之间的声音到达时延。常用的方法有最小均方自 适应滤波法、互功率谱相位法和广义互相关函数法。
收稿日期: 2010 12 16 作者 简 介: 任 勇 ( 1986 - ), 男, 硕 士 研 究 生。 研 究 方 向: FPGA设计 与应 用。胡 方明 ( 1964- ), 男, 教授。研 究 方 向: 物联 网。李 自 学 ( 1985 - ), 男, 硕 士 研 究 生。 研 究 方 向: FPGA设计与应用。
1 /N 就可以用来计算反 FFT。为防止运算过程中发生
溢出, 可将 1 /N 分配 到 每 一级 蝶 形运 算 中。 由 于 1 /N = ( 1 / 2)M , 所以每级的每个蝶形输出支路均有一 相乘因子 1 /2, 即右移一位即可。
2 8 峰值检测模块
对 FFT 结果求模即是求 R2 + I2的值, 然后求出
n+ 1 = n + 2dn tan- 1 2- n
( 14)
式 ( 10) 是迭代的初始条件, 式 ( 11) 是根据本次
和 2 间的广义互相关函数为
R12 ( ) = FFT - 1 ( am12 )
( 4)
其峰值就是麦克 1和 2之间的时延。得到多对麦克间
的时延后, 由角度距离定位法, 就可得到声源位置。
2 各模块设计实现
2 1 F IR 带通滤波模块 为了消除噪声和回声干扰的影响, 首先需要进行
滤波。语音信号的带宽是 0 3~ 3 4 kH z, 因而需要设 计一个带通滤波器滤除语音信号带宽之外的噪声。为 了使处理过的信号相位不发生变化即保持线性相位, 需要采用 F IR 滤波器。
本帧互功率谱乘 以存放在 ROM 中的 加权函数,
使互相关函数峰值更加突出。调用内部乘法器模块即
可完成。
2 6 功率谱平滑模块
对加权模块结果, 进行连续数帧的累加以平滑互
功率谱, 使峰值便于检测。调用内部加法器模块即可
完成。
2 7 反 FFT 模块
对平滑结果进行反 FFT 运算, 求得互相关函数。
根据 FFT 原理, 反 FFT 运算可借助于 FFT 模块计算。 即将 FFT 运算中旋转因子取倒数, 最后的输出乘 以
1 系统的基本原理及流程图
算法的结构流程如图 1所示, 首先由麦克 1和 2
获得说话人的语音信号, 再经过 A /D 采样和低通滤
波器, 最后得到待处理输入语音信号, 可以分别记为
x1 ( n )和 x2 ( n )。 经过 F IR 带 通 滤 波 器 后, 用 半 重 叠 汉明 窗 对
x1 ( n )和 x2 ( n )加窗可得 X 1w ( n)和 X 2w ( n ), 然后即可
即采用两个分别能存储一帧数据的双口 RAM, 第一 个 RAM 在存储新数据时, 第二个 RAM 进行 FFT 运
算, 并存储其结果。然后, 第一个 RAM 进行 FFT 运
算, 并存储其结果, 第二个 RAM 存储新的数据, 这
样就保证了信号处理的连续性。
转化为 CSD 编码以提高其运行效率, 最后由 V erilog 代码实现。
d a
( 9)
其中, a 是麦克之间的间距; d 是声源到麦克对的距 离差。
由上可知, 需要计算反余弦函数值确定出相应的
角度值。反余弦函数是超越函数, 可以用泰勒级数近
似计 算 这 个 函 数, 但 较 为 麻 烦 且 精 度 不 高, 而 CORD IC算法是由移位和加减运算组成, 所以比较适 合 FPGA 的实现, 速度较快且具有较高的迭代精度。 本系统使用高速 9级流水线结构实现 CORD IC 算法。 迭代关系如下
x0 = 1, y0 = 0, t0 = t, 0 = 0
( 10)
dn = sign( yn ), if xn tn; else- sign( yn )
xn+ 1
1
yn + 1 = dn 2- n
- dn 2- n 2 xn
1
yn
( 11) ( 12)
tn + 1 = tn + tn 2- 2n
( 13)
2 2 半重叠汉明窗模块
为了保证语音信号平稳性, 一帧信号的时间窗长
度选为 10~ 30 m s。而采样器频率为 10 kH z, 为了便 于 FFT 处理选择 25 6 m s即帧长为 256点。为了保证 统计特征的连续性和得到更好的语音处理效果, 各帧 之间进行 50% 的重叠, 即每次处理只更新 12 8 m s的 数据。这样, 一帧内的信号可以近似认为是平稳的。
其模值的峰值, 即相应的语音信号时延值。
2 9 定位算法模块 根据角度距 离定位法, 声 源相对原 点的水平 角
为 az im uth
= azimu th cos- 1
d 2a
( 8)
其中, a 是麦克之间的间距; d 是声源到麦克对的距
离差。
声源相对原点的仰角 为 elevation
elevation = cos- 1
任勇 , 等: 基于麦克风 阵列声源定位系统的 FPGA 实现
第二个结果, 产生下一级运算地址。 2 4 本帧互功率谱模块
第一路信号 FFT 结果与第二路信号 FFT 结果的
共轭相乘得到本帧互功率谱。
若第一路是 r1 + i1, 第二路是 r2 + i2, 其共轭 为 r2 - i2, 相乘时可用式 ( 6), 式 ( 7)所示的计算方法, 这样可以减少一次乘法运算, 节省内部资源
电子 电路
2011年第 24卷第 4期 E lectron ic Sc i& T ech /A pr 15, 2010
基于麦克风阵列声源定位系统的 FPGA实现
任 勇, 胡方明, 李自学
(西安电子科技大学 电子工 程学院, 陕西 西安 710071) 摘 要 论述了基于麦克风 阵列的声源定位技术的基本原理, 给出了利 用 FPGA 实现 系统各模 块的设计方 法。重 点介绍了其原理和模块 的电路实现, 给出的基于 FPGA 设计实验 结果表明, 系 统最大限度 发挥了 FPGA 的优势、简 化 了系统设计、缩短了设计周期、符合设计 要求。 关键词 声源定位 ; 时延估 计; FFT; CORD IC 中图分类号 TN 912 文献 标识码 A 文章编号 1007- 7820( 2011) 04- 072- 03
R = ( r2 + i2 ) i1 + r2 ( r1 - i1 )
( 6)
I = ( r2 - i2 ) r1 - r2 ( r1 - i1 )
( 7)
其中, R 和 I 是本帧互功率谱的实部和虚部; r1 和 r2
是 FFT 结果的实部; i1 和 i2 是 FFT 结果的虚部。
2 5 频域加权模块
图 3 乒乓 FFT 原理流程图
乒乓存储时由倒序地址模块产生倒序存储地址, 使 RAM 中存储数据为倒序, 为 FFT 运算做准备。为 了加快运 算速度, 蝶形运算 旋转因 子, 先由 M at lab 软件生成, 量化为 12 位带符号数, 然后存储在内部
ROM 里面。
整个 FFT 运算单元由状态机设计完成, 共由 5个
与矩形窗, 汉明窗比矩形窗的平滑效果更好, 故选择
汉明窗, 其表达式如式 ( 5)所示
w [ n] = 0 54- 0
46 cos
2
N
n -
1
,
n = 0,
1,, N- 1源自( 5)其中, N 是帧长。
2 3 FFT 运算模块 由于语音信号是连续的实时采样, 为了能使传来
的语音信号连续不断的处理, 这里采用了乒乓结构,
声源定位, 即确定一个或多个声源在空间中的位 置, 是一个有广泛应用背景的研究课题。基于麦克风 阵列的声源定位技术在视频会议、声音检测及语音增 强等领域有重要的应用价值。
声源定位算法目前主要有 3类: 第一类算法是基 于波束形成的方法。这种算法能够用于多个声源的定 位, 但是它存在着需要声源和背景噪声先验知识以及 对初始值比较敏感等缺点; 第二类算法是基于高分辨 率谱估计的方法。这种算法理论上能够对声源方向进 行有效估计, 但是计算量较大, 且不适于处理人声等 宽带信号; 第三类算法是基于到达时间差的方法。由 于这种方法原理简单, 计算量较小, 且易于实现, 在 声源定位系统中得到了广泛应用。根据以上介绍, 本 文决定选择第三类即基于到达时间差的定位方法。
R ealization of the Sound Source Localization System U sing FPGA Based on the M icrophone A rray
Ren Yong, H u Fangm ing, L i Z ixue ( S chool of E lectron ic Eng ineering, X id ian U n ivers ity, X i an 710071, Ch ina) Abstract T he b as ic princip le of the sound source localization algorithm based on the m icrophone array is d is cussed. T he design m eth ods for system modu les us ing FPGA are presen ted. Em phas is is pu t on the p rincip le and re alization o f the circu its. Expermi ent resu lts b ased on FPGA design show s that th e system mak es fu ll use of the advan tages of FPGA, smi p lifies the system des ign, shorten s the design period and m eets the requ irem ents for d es ign. K eywords sound sou rce localizat ion; tmi e delay estmi ation; FFT; CORD IC