E88新能源汽车网关软件设计方案
车辆管理系统设计方案
车辆管理系统设计方案济南蓝鹏电子有限公司二零零九年八月目录1、企业概况 (2)1.1济南蓝鹏电子有限公司简介 (2)1.2济南蓝鹏电子有限公司组织机构 (2)1.3部分工程业绩.........................................................................................错误!未定义书签。
2、方案设计的目标、依据及原则 (2)2.1方案设计依据 (2)2.2方案设计目标 (3)2.3方案设计原则 (3)3、BlueRoc智能停车场管理系统的基本组成及硬件介绍 (4)3.1系统的基本组成及平面示意图 (4)3.2停车场功能特点 (5)3.3自动道闸 (6)3.4车辆检测器 (7)3.5出入口控制机 (8)3.6、远距离读卡器 (10)3.6.1 读卡器的先进性 (10)3.7有源卡片感应卡 (11)4、BlueRoc智能停车场管理软件 (12)4.1卡片管理 (12)4.1.1 发行 (12)4.1.2 挂失 (12)4.2报表 (12)4.3数据备份、恢复及整理 (12)4.4停车场管理人员的权限管理 (13)5、停车场管理系统需求分析及流程简介 (13)5.1需求分析 (13)5.2车辆进出工作流程 (14)5.2.1 进场过程 (14)5.2.2 出场过程 (15)5.2.3 值班人员工作程序 (15)5.2.4 管理人员工作程序 (16)6、系统培训计划 (16)7、售后服务 (17)8、系统配置及价格 (17)1、企业概况1.1 济南蓝鹏电子有限公司简介济南蓝鹏电子有限公司成立于1995年,是一家集产品研发、市场推广、技术服务为一体的高新技术企业。
十余年来,我们陆续研制成功包含门禁、停车场、考勤、消费、巡更、电梯控制等智能卡一卡通系统在内的数十种产品,主要产品均已获得权威部门的检测认证,公司也已获得ISO9001全面质量管理体系认证。
汽车智能网联化解决方案

主动降噪,汽车音频增强, A2B技术
Wide Audio Design and
testing solutions
AVAS Engineering
Service A2B
ANC
Active Noise Cancellation Engine Order Cancellation Road Noise Cancellation
基于信号及报文的时序分析
- 包含发送方,多网段,接收方,网关 的“End to End”的基于功能的时 序模型
- 报文自动打包 - ID手动及自动分配 - 网络时序分析
Vehicle Sound Enhancement
ESS, AVAS etc.
Audio Engineering Linux & Embedded Audio
A2B® Solutions
IP Porting Integration Services
IP Algorithm Development Implementation Services
-自动驾驶,编队行驶,辅助驾驶 -远程诊断,远程控制,远程下载 -驾驶习惯分析 -智能手机互联(C养,保险,理赔,租赁,贷款管理
-加油站,充电桩查找;停车场,餐饮娱乐等引导
-音视频娱乐信息推送
Source: Designed around You - Volvo‘s all new EE Architecture and Development Process Dr. Thomas M. Müller, Vice President, Electrical & Electronic Systems Engineering,Volvo Car Group Automobil Elektronik Kongress, July 2013, Ludwigsburg, Germany
新能源汽车控制器解决方案 1

新能源汽车控制器解决方案上海革路电子科技有限公司April目录公司介绍VCU样机硬件方案软件方案附录020304050101革路公司介绍革路电子介绍革路电子是定位于汽车电子解决方案及产品化服务的提供商,基于对汽车电子及嵌入式软件系统的深入理解,能够根据客户不同需求,围绕汽车电子产品研发周期中的多个环节提供个性化工程技术服务。
公司依托国家可信嵌入式软件工程技术研究中心/上海工业控制系统安全创新功能性平台,与上海汽车,徐工集团等国内知名整车厂,Bosch,Continental等国际知名零部件厂商有长期业务合作。
合作伙伴与ST意法半导体/文晔集团合作,打造汽车电子领域专业的IDH设计团队员工数量研发团队30余人,核心研发人员均具备硕士及以上学历聚焦产品聚焦新能源汽车控制器及功能安全应用领域公司描述02 VCU 样件Demo Car ---GELU VCU InsidePedal BMSMCU Gateway PT CAN DC-DC VCU OBCBrakeGear ShiftChargingPlugCharger Dash BoardIVICooling FANVCU 样件关键指标功能安全设计目标:ASIL-C 关键器件安全等级:ASIL-D 微处理器安全措施存储器安全措施外围器件安全措施安全工作电压:9~16V工作温度:-40~105ºC机械尺寸:205mm X 150mm X 30mm内部PCB 164*120mm 环境额定功率:15W承受24V过压60s待机电流<1mA功耗功能安全支持硬件开发支持软件开发支持系统集成支持支持03控制器硬件解决方案MCUSPC574K72E7U-Chip L9788H-BridgeL9960THSD VQN7050LSD/HSD L9305LSD/HSD L9301CAN FD-PHY1路点火钥匙信号(KL.15)3路唤醒信号(ACC,DC 充电, AC 充电) 2路持续电源电压2路非持续电源电压3路外部5V电压(一共6个PIN脚)3组CAN通讯接口2路LIN通讯17路模拟信号输入口20路数字信号输入口11路频率信号输入口20路低边输出(PWM或DO)2路H桥驱动输出4路高边驱动大电流输出4路VFS 电流阀驱动输出2路高压继电器低边驱动输出2路高边小信号输出4路低边小信号输出6路传感器地3路功率地1路内部环境压力信号采集121 PIN 连接器U-Chip--L9788MCU--SPC574K72Hardware Reference01 GV1完成模高和图高的作业争取尽快做好不能再拖02GPF1辅助软件可以为幻灯片提供很好的辅助等有必要去学习03GPF2形成思路风格仔细考量细节把每一步做好04GX2PDCU Block Diagram (VCU+BMC 二合一)SBC L9788 带高低边输出TQFP100SPC58NG84E7LQFP176 ASIL D ASIL D3x LIN 2.1L9960T高压隔离采样光耦继电器+隔离ADC4xCAN FDPT-CAN BMCAN CG-CANDG-CAN◆SBC L9788MSC 接口与MCU 通信,带监控的电源WatchDog 看门狗,20多路高低边驱动◆MCU SPC58NG双核或三核芯,6M Flash ,180MHz 主频,ASIL D◆4路CAN动力CAN ,BMS 内部CAN ,充电CAN ,诊断CAN◆高压采集隔离TLX9175,光耦隔离继电器◆针对CMC 的CAN 或者菊花链接口◆外部RTC ◆外部存储器◆充电枪锁止RTC低压模拟输入20ch 开关输入20chPWM 输入12chEEPROM/SPI FlashL9301 LSDBMS CMC 电池管理系统从控框图SPC584B60LQFP100 ASIL BSBC L9396电压温度均衡AFE 模拟前端L9963电压温度均衡AFE 模拟前端L9963电压温度均衡AFE 模拟前端L9963Battery PackCAN FDERROR电压温度均衡AFE 模拟前端L9963◆SBC L9396功能安全等级ASIL-D ,SPI 接口与MCU 通信WatchDog 看门狗多路电源输出,6.5V Buck,5V LDO, 3.3V◆MCU SPC58功能安全ASIL B ,高性价比◆AFE 模拟前端L9963,符合功能安全ASIL-D ,4颗组成一组◆CANFD与内部BMS CAN 通信◆可选内外部均衡MOS◆可配置为主从一体,小型BMS可选外部均衡MOS为客户提供硬件设计工程服务0201030506系统功能设计和器件选型PCBA 提供样机调试与匹配原理图设计PCB 设计样品制作硬件开发0404软件解决方案OSEK Based Solution01 HW Driver包括MCU 片内外设驱动,SBC 驱动,LSD/HSD 驱动等,各部分的诊断功能支持02 OSEK OS实时性,可移植性,可扩展性03COM NM Others基于CAN FD / Ethernet(*),链路层,网络层,交互层,网络管理等,向上可支持UDS ,FLB ,CCP/xCP 等COMOSEK OSDriverHardware(HW)IOAutoSar Based Solution 201 MCAL 集成/复杂驱动开发包括MCU MCAL 集成,SBC/其他外部复杂驱动开发集成,包括各部分的诊断功能支持02 Autosar OS 集成集成面向SPC574/SPC58的Autosar OS03革路整合完毕商用BSW 和完成应用层革路根据客户要求,整合Etas/Vector 的商用BSW ,客户开发完成ASW ,负责整车测试与验证AUTOSAR BSWCDDMCALHardware(HW)IORTEAutosar SupportMCAL Config→VCU BMS ApplicationDirect Test Code ReferenceBased on EBBSWEtas RTA BSW RTE CAN COM J1939 DIAG SAFE XCP Config→VCU BMS Application Driver & Abstraction L9788 Complex DriverL9788 ECU Abstraction Layer Adapt L9305 L9301 Complex DriverSystem ASWSWC Model →VCU BMSINCA Calibration Support(XCP) HIL Validation04 Function SafetyU-Chip L9788VCU 安全架构设计SPC574K72 / SPC58NG84Core 1 PeripheralCore 0 Main5V Supply & TrackerWatchDogChecker CoreBrake Pedal Acce PedalGearCharging PlugKL15BMSBISTLSD/HSDDiagnosisBattery PowerMRD LSDMain RelayExt RelayCAN FD PHYLIN PHYVCU 功能安全设计点◆硬件设计整体满足ASIL C,核心IC按照ASIL D规格选择。
新能源汽车动力系统控制器硬件在环测试解决方案

新能源汽车动力系统控制器硬件在环测试解决方案相比较传统汽车,新能源电动汽车(包括纯电动汽车与混合动力电动汽车)动力系统增加了电机驱动系统、电池及其管理系统、整车控制器等关键零部件。
如图1所示,为一种常见的插电式混合动力汽车拓扑结构,与传统汽车相比,动力系统复杂程度增加,控制器数量增多,控制器测试的工作量与难度也相应增加。
图1 一种常见的插电式混合动力汽车拓扑结构新能源电动汽车对动力系统的动力性、经济性、制动性、排放性、可靠性等方面都有很高要求,需要对动力系统进行全面的测试,主要包括:动力性测试:最大输出功率最大扭矩加速时间最大爬坡度最高车速经济性测试:燃油消耗率平均燃油消耗量1 / 6电池能量消耗率平均电池能量消耗量制动性测试制动能量回收功能制动加速度制动距离制动时方向稳定性其它测试相关排放物含量安全防护通信故障诊断在传统的电动汽车动力系统测试中,需要使用大功率直流电源、测功机、功率分析仪、电池检测、数据采集等设备,并需要专门的配套实验室。
即使有了测试环境与测试工具,传统的测试方法还存在以下问题:耗费大量电能并产生废旧电池测试过程繁琐,耗费大量人力物力电机、电池等在极端运行环境下有较大的安全风险测试重现性较差,无法进行自动化测试使用硬件在环(HIL)测试方法,结合传统测试方法,将新能源电动汽车动力系统测试分成两个关键步骤:1.各个控制器的HIL测试,包括电池管理系统的HIL测试,电机控制器的HIL测试、整车控制器的HIL测试以及多个控制器的集成HIL测试,经过这个步骤,可以发现各个控制器存在的大部分问题,大幅降低后续大功率测试的风险与成本;2.整车动力系统的联合测试,利用HIL设备与传统测试台架相结合的联合测试台,对整车动力系统进行联合测试,用于验证动力系统的动力性、经济性、制动性、排放性、可靠性等指标,同时,对动力系统的通信、安全防护、故障诊断等进行全面测试。
相比较传统测试方法,联合测试方法可以更早地发现问题,降低风险与成本,使测试更加全面的同时缩短测试周期。
基于快速原型的新能源汽车网关控制器开发平台设计
基于快速原型的新能源汽车网关控制器开发平台设计郭海宇;张晓光【摘要】针对缩短新能源汽车网关控制器开发周期,并利用网关控制器对汽车全局信息的把控能力开发控制算法的需求,采用基于模型的嵌入式开发方法,利用The MathWorks公司的Simulink和Stateflow以及dSPACE公司的快速原型硬件平台MicroAutoboxII和实时管理软件Control Desk NG搭建网关控制器开发平台,并基于此平台设计了一款网关控制器软件.最终通过了台架测试和整车测试,实验结果表明,此平台不仅能够适应功能需求的频繁变化,在车辆开发初期快速响应实验验证的需要,同时能够为后续算法验证提供平台,具有很好的延展性.【期刊名称】《现代电子技术》【年(卷),期】2018(041)019【总页数】5页(P141-145)【关键词】电动车网关;基于模型的设计;快速原型;TargetLink;Simulink;Stateflow 【作者】郭海宇;张晓光【作者单位】沈阳工业大学,辽宁沈阳 110870;华晨汽车工程研究院,辽宁沈阳110141【正文语种】中文【中图分类】TN876-34;TP3110 引言当今社会普遍面临着能源枯竭、环境污染等问题。
预计到2020年交通用油占全球石油总消耗的62%以上,因此世界各国都在交通能源转型上加大了投入力度[1]。
新能源汽车具有排放低、综合能源利用效率高的特点,逐渐成为全球研究的重点方向[2],电动汽车、混合动力汽车得到了飞速的发展。
开发新能源汽车控制技术是今后汽车工业发展的必然方向[3]。
随着电子技术和通信技术的飞速发展,现如今的汽车电控系统普遍采用现场总线网络技术。
汽车通信方式的改变,解决了由于汽车电控单元不断增加带来的线路复杂和线束增加的问题,不仅极大地提高了通信效率,节约成本,满足汽车轻量化需求,同时也是汽车通信和控制的一个重要基础[4]。
由于技术不断创新,汽车网络具有多协议并存的发展趋势,因此网关将是汽车电子的重要组成部分[5]。
基于独立网关的汽车网络总线系统设计
非 法用 户 入侵 整 车 网络 ,提 高网络 的安 全 等级 , 从
而 提高 汽车 整体 的安全 性 。
3 独立 网关设计开发
独 立 网关 采 用 飞 思 卡 尔 公 司 MC S 2 D 5 2 9 1 X P 1
() 8 报文质量 : 网络传输报 文的速率 、 优先等
LBA A C R测 试 台 , 独 立 网关 进 行 物 理 层 、 讯 、 对 通 自
/ 确认
诊断和网络监听等 6 O多项专项测试 ,如终端电阻 、 C N线故障测试 、A A C N波特率 、 网络建环 、 网络管理 帧 的参数、 稳定建环 、 紧急操作模式和网络错误造成 的网络信号 的丢失 、u—f后 网络等待时间 、在线 b so 刷新等。
灵活 实现 系统 平 台化设 计 。
关 键词 : 车 网络 总线 汽
独 立 网关
V模 型
1 引 言
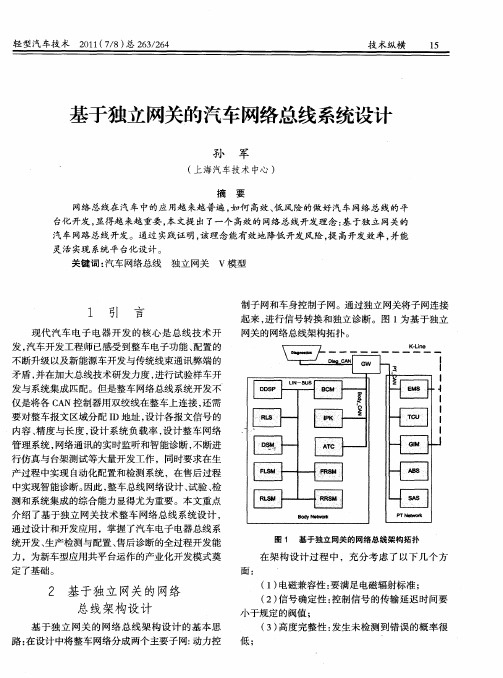
现 代 汽 车 电 子 电 器 开 发 的核 心 是 总 线 技 术 开 发 , 车开 发 工程 师 已感受 到整 车 电子 功能 、 置 的 汽 配
制子网和车身控制子网。通过独立网关将子网连接 起来 , 进行信号转换和独立诊断。图 1 为基 于独立 网关 的网络 总线架 构拓 扑 。
而言 , 车身控制子 网的控制器信息较少 , 实时性要求 也 不是 十分 严格 , 以采用 2 0 b s 中速 C N通 所 5K p 的 A 讯 速率 。同时考 虑到 目前 车身控 制 子 网范 畴 的控 制
器 件 比较 多 , 有扩展 的可能 , 多 的车 身 电子控 制 且 众
一
技术 :
31 时序 控 制 .
在整车网络架构中,独立 网关作为各个子网的
电动汽车充电网关控制器开发
电动汽车充电网关控制器开发王鸣;张振东【摘要】外接充电是纯电动车获取能量的唯一途径,而各国充电标准存在较大差异,导致按照不同标准设计的充电桩之间不匹配.为了快速解决该问题,对两个完全不同的充电标准进行了对比分析,并对一款成熟的发动机控制器的硬件结构进行了优化配置,开发了一款充电网关控制器.通过模拟北美标准(SAE)中的局域网络信号,并将其转换为国家标准(GB)中的局域网络信号,实现了不同充电标准协议之间的转换.通过试验验证了设计该控制器的合理性,并使一款符合北美标准的电动汽车在符合国家标准的充电桩上实现了快速直流充电.【期刊名称】《能源研究与信息》【年(卷),期】2018(034)003【总页数】5页(P159-163)【关键词】电动汽车;充电标准;网关控制器;协议转换【作者】王鸣;张振东【作者单位】上海理工大学机械工程学院,上海 200093;上海汽车集团股份有限公司技术中心,上海 201805;上海理工大学机械工程学院,上海 200093【正文语种】中文【中图分类】U469.72随着石油资源紧缺和汽车污染问题的加剧,电动汽车的发展成为必然趋势,我国也将以电动汽车为主的新能源汽车列为战略性新兴产业之一[1-3]。
对于纯电动车来说,外接充电是其获取能量的唯一途径,而各国快速充电标准存在较大差异。
目前电动车的充电方式主要有快充(直流充电)和慢充(交流充电)两种,各国家和地区对快充都有各自的标准。
主流的快速充电接口标准有北美标准(SAE)[4]、欧洲标准(IEC)[5]和中国国家标准(GB)[6-9]等。
近年来,随着国家充电标准,尤其是快充标准的完善和推广,在中国销售的车型须符合国家快充标准。
因此,很多国外电动车在国内都遇到充电标准不匹配的问题,从而影响国外电动车在国内的销售和使用。
因此,如何利用国家标准充电桩对国外电动车进行快速充电成为急需解决的问题。
实现对国外电动车的快充功能,关键是要在国家标准充电桩与国外生产的电动车的电池管理系统之间建立正常的通讯联系。
车辆智能网关升级方案设计

车辆智能网关升级方案设计随着智能化和信息化的发展,车联网技术已经成为汽车行业的重要发展趋势。
而车辆智能网关作为车联网系统中数据传输的核心组件,也需要不断进行升级以满足不断增长的数据量和更高的安全性需求。
本文将介绍一种车辆智能网关升级方案设计,以提高车辆智能网关的性能和安全性。
现状分析目前,车辆智能网关主要通过传统的有线或无线协议进行通信,包括CAN、LIN、Flexray、Ethernet、Wi-Fi、Bluetooth等。
在传输过程中,数据可能会受到干扰或攻击,进而导致信息泄露和系统故障。
为了提高车辆智能网关的性能和安全性,需要进行升级。
升级方案设计1. 多协议通信采用多协议通信可以满足不同业务场景的需求,同时也可以增加系统的灵活性和可扩展性。
在传输数据时,可以结合不同协议的优势,进行快速高效的数据传输。
例如,将CAN和Ethernet协议结合使用,可以实现高速传输、大数据量传输和安全性传输。
2. 数据压缩和加密为了解决大数据量和传输安全性问题,可以采用数据压缩和加密技术对数据进行处理。
采用数据压缩可以将数据量缩小,降低传输成本,提高传输速度;采用数据加密技术可以保证数据在传输过程中的安全性,防止数据被窃取和篡改。
3. 安全认证车辆智能网关需要有严格的安全认证机制,以保证系统的安全性和可靠性。
在升级后,可以加强客户端认证和服务端认证,确保只有经过认证的客户端和服务端才能进行数据传输和访问,保障系统的安全性。
此外,还可以采用数字证书、消息摘要等技术对数据进行安全验证。
4. 系统监控和维护在升级后需要进行系统的监控和维护工作,以发现系统中的问题并及时修复。
在系统的实时监测上,可以采用物联网和云计算等技术,对系统进行实时监控,并收集数据信息和系统状态,以便在出现故障时能够及时排查故障点并进行修复。
结论车辆智能网关升级方案设计可以提高车辆智能网关的性能和安全性,同时也可以增加系统的灵活性和可扩展性。
通过多协议通信、数据压缩和加密、安全认证和系统监控和维护等方面的升级,可以保障车辆智能网关的正常运行和数据安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
密级:E88新能源汽车网关软件设计方案长春启阳信息技术股份有限公司目录1引言(INTRODUCTION) (3)1.1网关软件设计 (5)1.2网关路由功能设计 (5)1.2.1 接收中断处理 (5)1.2.2接收处理任务 (7)1.3报文周期发送报警处理 (7)1.3.1采用操作系统提供的报警 (7)1.3.2 发送定时器更新模块 (9)1.3.3路由过程中发送定时器处理模块 (9)1.4报文发送任务 (10)1.5报文处理 (10)2网关直接网络管理功能设计及实现 (12)2.1OSEK/VDX直接网络管理介绍 (12)2.1.1直接网络管理概念 (12)2.1.2直接网络管理的内部状态 (12)2.1.3直接网络管理的通信消息 (12)2.2.1任务总体设计 (14)2.2.2定时器总体设计 (16)2.2.3NMPDU到CAN报文的映射 (17)3网关间接网络管理功能设计及实现 (18)3.1OSEK/VDX间接网络管理介绍 (18)3.2间接网络管理功能设计 (19)3.2.1 报文接收状态配置表 (19)3.2.2接收定时器 (19)3.2.3报文接收过滤及处理模块 (21)3.2.4接收定时器更新模块 (22)3.2.5接收超时处理模块 (23)1引言(Introduction)针对电动汽车车身网络平台而言,作为网络交通枢纽的中央网关控制器需要将接收到的报文存入数据缓冲区,同时还需要将转发的数据重新拆分打包,进行协议转换出来,因此在网关控制器的选择上要求其具有较高的内存容量和较快的处理速度。
随着全球汽车电子行业的迅猛发展,从C51单片机到ARM9微处理器,车内控制器的性能一直不断提高。
目前32位RISC内核微处理器不但占据了高端控制器市场,同时也向低端控制器领域发展,凭借其低功耗、高性价比等提点,在汽车控制网络中得到广泛应用是可以预见的,因此本方案选取了NXP公司汽车专用的V850ES/FK3的32位RISC内核微处理器,其丰富的外设接口和强大性能有利于后续网络的扩展功能。
本文档介绍网关的基本工作原理和系统结构,提出基于CAN/LIN总线的车身网关功能定义和整体设计方案,针对电动汽车特点制定了基于SAEJ1939的CAN应用层协议。
CAN/LIN网关在硬件架构上采用了NEC基于RISC 内核内核的32位控制器V850ES/FK3和容错低速CAN接收器(TJA1054)。
CAN节点采用V850ES/FK3系列单片机,完成了电动机控制节点和状态显示节点的电路板制作和程序设计。
最后将各节点与网关组合起来,借助硬件节点与仿真软件相结合的方法对整个通信网络的关键性能进行测试分析,在调试过程中对设计中存在的不足进行优化和改善。
实验结果表明CAN、LIN节点与网关软硬件工作稳定,实现了网关的报文转发和模拟电动机控制、车身控制台和门锁控制节点的功能,对车身控制中的其他部分有着借鉴意义,为整车控制网络平台和其他功能节点提供了参考模型1.1网关软件设计网关软件整体结构包括三部分,分别是操作系统,底层驱动程序和应用软件,其中应用软件部分包括路由功能模块和网络管理模块。
网关软件整体结构如下图1所示。
图1 网关软件整体结构操作系统采用符合OSEK/VDX标准的osCAN实现,由于osCAN硬件平台基于MPC555,因此该部分重点是针对网关所采用的控制器进行操作系统的移植。
OSEK操作系统在NEC32位硬件平台的移植工作已经完成,经过验证,目前操作系统在32位NEC单片机中可以正常运行。
单片机底层驱动程序的设计与实现中,重点针对网关的实际应用,对CAN模块、定时器模块以及中断模块等底层驱动程序进行了设计及实现。
CAN底层驱动程序包括CAN模块寄存器初始化、CAN报文发送、CAN报文接收、CAN中断设置以及总线睡眠与唤醒设置等。
应用软件是实现网关信息交互和网络管理功能的关键,本文档主要介绍网关应用软件的设计。
1.2网关路由功能设计1.2.1接收中断处理为了减少中断处理时间,在接收中断中只进行接收滤波工作,包括接收报文帧类型、报文ID以及报文数据长度滤波,然后将需要路由的报文存入接收队列缓冲区中,同时激活接收处理任务。
接收队列的结构设计如下:#define RX_FRM_QUEUE_LEN (GATEWAY_RX_FRM_CNT<<1)/*CAN Frame Rx Queue Definition*/typedef struct _RX_FRM{tRxFrmDescr * pRxFrmDescr; /*pointer to frame in rx table*/unsigned char aucData[8]; /*Msg Data*/}RX_FRM;typedef struct _RX_FRM_QUEUE{RX_FRM astrRxFrm[RX_FRM_QUEUE_LEN];unsigned char ucWriteIndex; /*write index of the queue*/unsigned char ucReadIndex; /*read index of the queue*/ }RX_FRM_QUEUE;接收中断处理程序流程图5如下:图5 接收中断处理程序流程图1.2.2接收处理任务接收处理任务主要负责对接收队列操作,将接收队列头部报文路由至目标发送缓冲区中,同时将目的报文放入发送队列中,激活报文发送任务,最后更新接收队列。
接收处理任务程序流程如下图6所示。
图6接收处理任务程序流程图1.3报文周期发送报警处理1.3.1采用操作系统提供的报警一、对于周期发送的报文,有些需要设置周期发送定时器。
在系统设计时,可以根据发送报文表对存在周期发送方式的每个报文均设定周期报警定时器。
1、对于报文转发的情形,根据源报文和目的报文的发送周期相同与否考虑是否需要设定发送定时器。
2、但是对于信号路由的报文,则需要使用周期发送定时器,因为仅依赖于事件触发方式时难以满足周期发送的要求!二、对于周期发送简要设计如下:在接收处理任务中,如果源报文ID与目的报文ID相同,则为报文转发,此时如果报文发送周期相同,则直接将报文按事件触发方式处理,不设置发送定时器;如果报文发送周期不相同,则需要设置发送定时器。
1、如果源报文ID与目的报文ID不相同时,则为信号路由。
此时如果目的报文支持事件触发,则直接将报文写入发送队列;如果目的报文支持周期发送,则同时激活发送定时器,定时时间为发送周期,而在发送定时中断中主要负责将待发送报文写入发送队列中。
2、对于信号路由的目的报文,网关在初始化后是否需要立即周期发送默认值需要考虑(还是某个信号更新之后再开始发送)。
三、对于周期报警发送的信号路由的报文:1、如果网关未接收到源报文,则网关自动以一定周期发送默认值;2、如果网关接收到源报文,但是不支持事件触发,那么网关仍然以原来的报警周期发送该报文;3、如果网关接收到源报文,并且支持事件触发方式,那么在将目的报文插入发送队列的同时,要将报警清零,重新设置报警,防止在较短时间内同时发送两帧报文的情形,目的报文以被插入发送队列时刻为新的周期起点进行周期发送。
4、如果网关之前正常接收源报文,但突然没有接收某个源报文,那么目的报文中的信号保持最后一次的值。
四、对于周期发送的报文转发方式的报文:1、直接按照事件触发处理,即如果接收到报文,则执行转发操作;2、如果接收不到源报文,则不发送任何报文。
3、对于报文路由但源报文和目的报文周期不相同时,采取与信号路由相同的方式,但是当接收不到源报文时,立即停止发送目的报文,同时目的报文的发送起始点是接收到第一帧源报文的时刻。
五、根据上述设计,需要对接收处理任务略做更改,同时增加发送定时报警处理。
在发送定时报警中,根据报警的类型将指定报文插入队列中,同时更新发送报警计数。
六、在实际整车网络协议中,如果接收报文ID和发送报文ID相同,那么必为报文路由,报文发送周期一定是相同的,因此对报文ID相同但发送周期不同的情况网关软件设计时目前不予考虑。
1.3.2发送定时器更新模块此模块负责在系统定时中断中更新发送定时器计数值,判断定时器是否溢出并调用报文发送程序将目的报文插入发送队列。
发送定时器更新流程如下图7所示。
图7 发送定时器更新流程1.3.3路由过程中发送定时器处理模块路由过程中发送定时器处理算法如下:1、如果目的报文为周期发送,并且发送定时器未启动,则启动发送定时器;2、如果目的报文为周期发送,并且为信号路由方式,则该目的报文只在自身周期定时器溢出时进行发送,在收到源报文时并不立即转发,防止短时间内发送两次目的报文;3、如果目的报文为周期发送,并且为报文转发方式,则该目的报文在接收到源报文时立即转发,并且设置报文立即转发标志位为1;在目的报文周期定时器溢出时,会检查报文立即转发标志位,如果为1则不发送报文,如果为0表示定时周期内未接收到任何源报文,发送上一次的目的报文;4、如果目的报文不是周期发送而是事件发送方式,比如诊断报文,则该目的报文在接收到源报文时立即转发,并且设置报文立即转发标志位为1。
1.4报文发送任务报文发送任务主要负责操作发送队列,基于FIFO或ID优先级机制选择待发送报文,然后将报文发送到目的总线。
程序流程图8如下所示。
图8报文发送任务处理流程1.5报文处理数据处理部分的程序流程图如图9:图9 数据处理部分的程序流程图2网关直接网络管理功能设计及实现2.1OSEK/VDX直接网络管理介绍直接网络管理概念、网络状态、节点操作模式、NMPDU的映射、网络管理消息类型、定时器;几点关键:网络启动、节点加入和退出、节点跳过、逻辑后继节点的更新2.1.1直接网络管理概念直接网络管理使用逻辑环来实现网络监控信息的同步。
在逻辑环内,每个节点有一个地址,通信顺序独立于网络结构,每个节点都指定一个逻辑后继节点,第一个节点是逻辑环中最后一个节点的逻辑后继。
直接网络管理要求网络实现广播类型的消息传输,以便于每个节点都能接收到网络上其它节点发送的消息。
通过在应用层实现站-站通信,并监控逻辑环上的消息传递来实现对ECU和整个网络的管理。
2.1.2直接网络管理的内部状态NM组件使用传输的消息信息来确定网络的状态和配置。
网络的状态提供网络管理当前工作阶段的信息。
网络管理的三个主要的状态为NMOff、NMOn和NMShutDown。
其中NMOn包括:NM初始化NMInit、NM的激活状态NMAwake、NM处于睡眠模式NMBusSleep、使能NM通信NMActive和禁止NM通信NMPassive。
其中NMAwake包括:确定节点自身可操作的状态NMReset、直接监控处理NMNormal、节点自身故障处理NMLimpHome状态。