PWM对齐方式
STM32 TIM的PMW模式
STM32 TIM的PMW模式STM32开发板学习日记-[5]TIM的PMW模式脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。
在TIMx_CCMRx寄存器中的OCxM位写入’110’(PWM模式1)或’111’(PWM模式2),能够独立地设置每个OCx输出通道产生一路PWM。
必须设置TIMx_CCMRx寄存器OCxPE位以使能相应的预装载寄存器,最后还要设置TIMx_CR1寄存器的ARPE位使能自动重装载的预装载寄存器(在向上计数或中心对称模式中)。
因为仅当发生一个更新事件的时候,预装载寄存器才能被传送到影子寄存器,因此在计数器开始计数之前,必须通过设置TIMx_EGR寄存器中的UG位来初始化所有的寄存器。
OCx的极性可以通过软件在TIMx_CCER寄存器中的CCxP 位设置,它可以设置为高电平有效活或低电平有效。
TIMx_CCER寄存器中的CCxE位控制OCx输出使能。
在PWM模式(模式1或模式2)下,TIMx_CNT和TIM1_CCRx 始终在进行比较,(依据计数器的计数方向)以确定是否符合TIM1_CCRx≤TIM1_CNT或者TIM1_CNT≤TIM1_CCRx。
然而为了与OCREF_CLR的功能(在下一个PWM周期之前,ETR信号上的一个外部事件能够清除OCxREF)一致,OCxREF信号只能在下述条件下产生:●当比较的结果改变●当输出比较模式(TIMx_CCMRx寄存器中的OCxM位)从“冻结”(无比较,OCxM=’000’)切换到某个PWM模式(OCxM=’110’或’111’)。
PWM方式
PWM调制方式的谐波含量评价指标:
a)总谐波畸变系数(THD):THD表征了实际波形与其基波分量差异的
9对锯齿波、对称规则采样而
言,调制过程造成的相位滞后为
1/2个载波周期;
9对不对称规则采样而言,调制
t
过程造成的相位滞后为1/4个载
波周期;
9这种固定的相位滞后可以通过 ΔT
将参考指令波形提前相应的相位
来进行补偿;
规则采样PWM则比较容易
t
数字控制实现;
ΔT
锯齿波调制的规则采样PWM
比较锯齿波调制的规则采样和自然采样PWM方式,可以发现,二者 之间差异比较大。锯齿波调制的规则采样PWM方式一方面存在基波边带 谐波,另一方面载波边带也有些偏移。
∑ DF 2
=
1 V1
⎜⎛ ⎜⎝
∞ n=2,3
⎜⎛ ⎝
Vn n2
⎟⎞ 2 ⎠
⎟⎞1/ 2 ⎟⎠
2.单相逆变器的PWM方式
2.1自然采样PWM
自然采样PWM:是在参考信号与载波信号的交点处进行开关切 换的PWM方式。
载波有锯齿波和三角波,
1.0
t
−1.0
自然采样PWM难以用数字控制实现,因为调制波与载波交 点的求解通常需要解超越方程。
( ) vbc∗ = vbz∗ − vcz∗ = m 3Vdc cos ωot − π / 2
( ) vca∗ = vcz∗ − vaz∗ = m 3Vdc cos ωot + 5π / 6
四种pwm控制技术的原理
四种pwm控制技术的原理
PWM(Pulse Width Modulation,脉宽调制)是一种常用的数字控制技术,用于实现模拟信号的精确控制。
它通过改变信号的脉冲宽度来控制信号的平均电压或电流。
下面是四种常见的PWM控制技术及其原理:
1. 占空比控制:占空比是PWM信号高电平与周期之比。
通过改变占空比可以控制输出信号的平均电压或电流。
占空比越大,输出信号的平均电压或电流越大;占空比越小,输出信号的平均电压或电流越小。
这种方法简单易行,适用于许多应用场合。
2. 脉冲数改变:这种方法通过改变PWM信号每个周期中的脉冲数来控制输出信号的平均电压或电流。
脉冲数越多,输出信号的平均电压或电流越大;脉冲数越少,输出信号的平均电压或电流越小。
脉冲数改变时,周期保持不变。
这种方法常用于需要精确控制输出信号的平均电压或电流的应用。
3. 频率调制:这种方法通过改变PWM信号的频率来控制输出信号的平均电压或电流。
频率越高,输出信号的平均电压或电流越大;频率越低,输出信号的平均电压或电流越小。
输出的平均功率受频率的影响最小,可以实现高效的能量转换。
频率调制一般使用较高的固定占空比。
4. 相位移控制:这种方法通过改变PWM信号相位来控制输出信号的平均电压或电流。
相位移正比于输出信号的平均电压或电流。
相位移控制可以实现交流电源的电压或电流控制,广泛应用于电网有功功率控制和无功功率控制。
这四种PWM控制技术可以根据具体应用的需要选择合适的方式,以实现对输出信号的精确控制。
SVPMW占空比计算(五段式七段式)
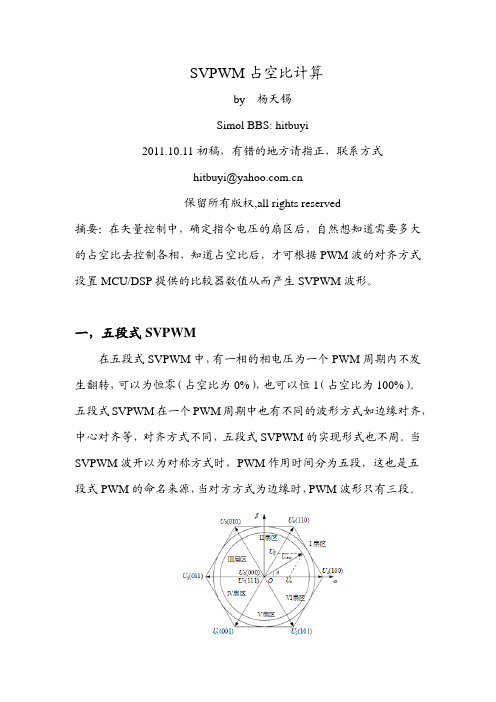
一,五段式 SVPWM
在五段式 SVPWM 中, 有一相的相电压为一个 PWM 周期内不发 生翻转, 可以为恒零 (占空比为 0%) , 也可以恒 1 (占空比为 100%) 。 五段式 SVPWM 在一个 PWM 周期中也有不同的波形方式如边缘对齐, 中心对齐等,对齐方式不同,五段式 SVPWM 的实现形式也不周。当 SVPWM 波开以为对称方式时,PWM 作用时间分为五段,这也是五 段式 PWM 的命名来源, 当对方方式为边缘时, PWM 波形只有三段。
(1-18)
4. U ref 位置第四扇区 根据式(1-4)有
第 8 页 共 30 页
π = T3 mTS sin(θ − ) 3 = T1 mTS sin(θ − π )
(1-19)
(1). 如果选 C 相电压在一个 PWM 周期内恒高,边缘对齐情 况见图 1-9a, 中心对齐情况见图 1-9b。
B B C C A
C A A B B
1. U ref 位置第一扇区 (1) . 如果选 A 相电压在一个 PWM 周期内恒高, 并且 PWM 对 齐方式为边缘方式,则 PWM 开关情况如图 1-3a 所示,如果 PWM 对 齐方式为中心对称方式,则 PWM 开关情况如图 1-3b 所示。
图 1-3a 边缘对齐(第一扇区)
表 1-1 五段式 SVPWM 各扇区不发生开关相总结
扇区
Ⅰ区(0°≤θ≤60°)
可为恒高相 A
可为恒低相 C
第 3 页 共 30 页
Ⅱ区(60°≤θ≤120°) Ⅲ 区(120°≤θ≤180°) Ⅳ 区(180°≤θ≤240°) Ⅴ 区(240°≤θ≤300°) Ⅵ 区(300°≤θ≤360°)
(1-26)
stm32定时器时钟以及中间对齐模式
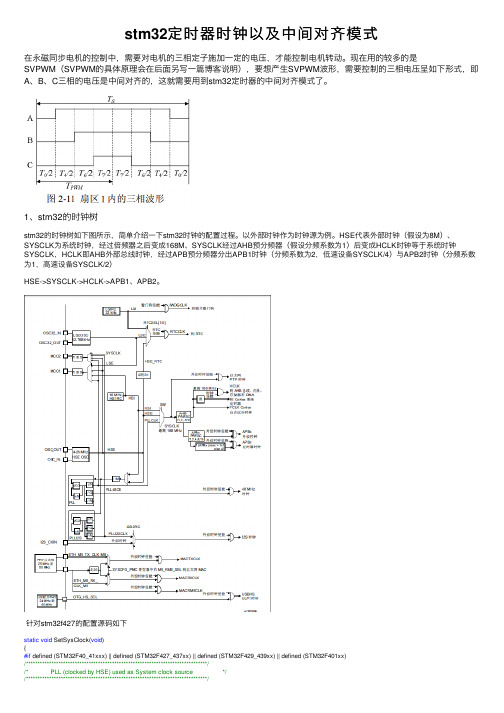
stm32定时器时钟以及中间对齐模式在永磁同步电机的控制中,需要对电机的三相定⼦施加⼀定的电压,才能控制电机转动。
现在⽤的较多的是SVPWM(SVPWM的具体原理会在后⾯另写⼀篇博客说明),要想产⽣SVPWM波形,需要控制的三相电压呈如下形式,即A、B、C三相的电压是中间对齐的,这就需要⽤到stm32定时器的中间对齐模式了。
1、stm32的时钟树stm32的时钟树如下图所⽰,简单介绍⼀下stm32时钟的配置过程。
以外部时钟作为时钟源为例。
HSE代表外部时钟(假设为8M)、SYSCLK为系统时钟,经过倍频器之后变成168M、SYSCLK经过AHB预分频器(假设分频系数为1)后变成HCLK时钟等于系统时钟SYSCLK,HCLK即AHB外部总线时钟,经过APB预分频器分出APB1时钟(分频系数为2,低速设备SYSCLK/4)与APB2时钟(分频系数为1,⾼速设备SYSCLK/2)HSE->SYSCLK->HCLK->APB1、APB2。
针对stm32f427的配置源码如下static void SetSysClock(void){#if defined (STM32F40_41xxx) || defined (STM32F427_437xx) || defined (STM32F429_439xx) || defined (STM32F401xx)/******************************************************************************//* PLL (clocked by HSE) used as System clock source *//******************************************************************************/__IO uint32_t StartUpCounter = 0, HSEStatus = 0;/* Enable HSE */RCC->CR |= ((uint32_t)RCC_CR_HSEON);/* Wait till HSE is ready and if Time out is reached exit */do{HSEStatus = RCC->CR & RCC_CR_HSERDY;StartUpCounter++;} while((HSEStatus == 0) && (StartUpCounter != HSE_STARTUP_TIMEOUT));if ((RCC->CR & RCC_CR_HSERDY) != RESET){HSEStatus = (uint32_t)0x01;}else{HSEStatus = (uint32_t)0x00;}if (HSEStatus == (uint32_t)0x01){/* Select regulator voltage output Scale 1 mode */RCC->APB1ENR |= RCC_APB1ENR_PWREN;PWR->CR |= PWR_CR_VOS;/* HCLK = SYSCLK / 1*/RCC->CFGR |= RCC_CFGR_HPRE_DIV1;//AHB时钟#if defined (STM32F40_41xxx) || defined (STM32F427_437xx) || defined (STM32F429_439xx)/* PCLK2 = HCLK / 2*/RCC->CFGR |= RCC_CFGR_PPRE2_DIV2;//APB2时钟/* PCLK1 = HCLK / 4*/RCC->CFGR |= RCC_CFGR_PPRE1_DIV4;//APB1时钟#endif /* STM32F40_41xxx || STM32F427_437x || STM32F429_439xx *//* Configure the main PLL */RCC->PLLCFGR = PLL_M | (PLL_N << 6) | (((PLL_P >> 1) -1) << 16) |(RCC_PLLCFGR_PLLSRC_HSE) | (PLL_Q << 24);/* Enable the main PLL */RCC->CR |= RCC_CR_PLLON;/* Wait till the main PLL is ready */while((RCC->CR & RCC_CR_PLLRDY) == 0){}#if defined (STM32F427_437xx) || defined (STM32F429_439xx)/* Enable the Over-drive to extend the clock frequency to 180 Mhz */PWR->CR |= PWR_CR_ODEN;while((PWR->CSR & PWR_CSR_ODRDY) == 0){}PWR->CR |= PWR_CR_ODSWEN;while((PWR->CSR & PWR_CSR_ODSWRDY) == 0){}/* Configure Flash prefetch, Instruction cache, Data cache and wait state */FLASH->ACR = FLASH_ACR_PRFTEN | FLASH_ACR_ICEN |FLASH_ACR_DCEN |FLASH_ACR_LATENCY_5WS; #endif /* STM32F427_437x || STM32F429_439xx *//* Select the main PLL as system clock source */RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_SW));RCC->CFGR |= RCC_CFGR_SW_PLL;/* Wait till the main PLL is used as system clock source */while ((RCC->CFGR & (uint32_t)RCC_CFGR_SWS ) != RCC_CFGR_SWS_PLL);{}}else{ /* If HSE fails to start-up, the application will have wrong clockconfiguration. User can add here some code to deal with this error */}}2、stm32定时器的时钟stm32定时器分为⾼级定时器(TIM1与TIM8)、通⽤定时器(TIM2-TIM5、TIM9-TIM14)、基本定时器(TIM6、TIM7)。
几种PWM控制方法

脉冲宽度调制(PWM)是英文“Pulse Width Modulation”的缩写,简称脉宽调制。
它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。
一种模拟控制方式,根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定。
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。
电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。
通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。
只要带宽足够,任何模拟值都可以使用PWM进行编码。
多数负载(无论是电感性负载还是电容性负载)需要的调制频率高于10Hz,通常调制频率为1kHz到200kHz之间。
许多微控制器内部都包含有PWM控制器。
例如,Microchip公司的PIC16C67内含两个PWM控制器,每一个都可以选择接通时间和周期。
占空比是接通时间与周期之比;调制频率为周期的倒数。
执行PWM操作之前,这种微处理器要求在软件中完成以下工作:* 设置提供调制方波的片上定时器/计数器的周期* 在PWM控制寄存器中设置接通时间* 设置PWM输出的方向,这个输出是一个通用I/O管脚* 启动定时器* 使能PWM控制器PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换。
让信号保持为数字形式可将噪声影响降到最小。
噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响。
对噪声抵抗能力的增强是PWM相对于模拟控制的另外一个优点,而且这也是在某些时候将PWM用于通信的主要原因。
PWM脉宽调制方法介绍
脉冲宽度调制脉冲宽度调制(PWM)是英文“Pulse Width Modulation”的缩写,简称脉宽调制。
它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。
一种模拟控制方式,根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定。
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。
电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。
通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。
只要带宽足够,任何模拟值都可以使用PWM进行编码。
多数负载(无论是电感性负载还是电容性负载)需要的调制频率高于10Hz,通常调制频率为1kHz到200kHz之间。
许多微控制器内部都包含有PWM控制器。
例如,Microchip公司的PIC16C67内含两个PWM控制器,每一个都可以选择接通时间和周期。
占空比是接通时间与周期之比;调制频率为周期的倒数。
执行PWM操作之前,这种微处理器要求在软件中完成以下工作:* 设置提供调制方波的片上定时器/计数器的周期* 在PWM控制寄存器中设置接通时间* 设置PWM输出的方向,这个输出是一个通用I/O管脚* 启动定时器* 使能PWM控制器PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换。
让信号保持为数字形式可将噪声影响降到最小。
噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响。
对噪声抵抗能力的增强是PWM相对于模拟控制的另外一个优点,而且这也是在某些时候将PWM用于通信的主要原因。
控制单相感应电机的三种方式
控制单相感应电机的三种方式每一天,工程师们都在设计利用单相感应电机的产品,在大多数电机控制的应用处合中,单相感应电机的转速控制都是令人满意的,因为它不仅能够实现不同的转速,还能够降低功率消耗和噪声。
大多数单相感应电机是单向运行的,这是因为它们在设计时被设为单方向旋转。
通过增加额外的线圈、外部继电器和开关,或通过增加齿轮机构,能够改变旋转方向。
采用基于微控制器的控制系统,能够改变系统的调速范围。
除此之外,采用不同的电机控制算法,电机的旋转方向也能够被改变。
固定分相电容器式(Permanent Split Capacitor, PSC)电机是单相感应电机中最多见的类型。
本文将会讨论三种不同的技术和驱动方式,它们可用于单向或双向控制PSC 电机的转速。
PIC 18F2431或dsPIC30F2010的引脚。
微控制器界面微控制器是系统的大脑。
通常,电机控制应用中所利用的微控制器具有专门的外围设备,例如电机控制脉宽调制(PWM)、高速模数转换器(ADC)和诊断管脚。
Microchip公司的PIC18F2431和dsPIC30F2010都内嵌有这些功能。
通过访问微处置器上的专用片内外围设备,能够使控制算法的执行进程加倍简单。
ADC通道可用于测量电机电流、电机温度和散热片温度(与电源开关相连)。
另外ADC 通道还可用于读取电位计电平,那个信号以后可用于设置电机转速。
其他的ADC通道用于现场级应用,读取不同的传感器数据,例如接近开关、浊度传感器、水位、冷却器温度等等。
在一项具体应用中,通用I/O接口能够用作开关和显示器的连接接口。
例如,在冰箱应用中,这些通用I/O能够用于控制LCD显示器、七位LED显示器、按钮界面等等。
通信通道如I2C 或SPI用于连接电机控制板和另一个电路板以变换数据。
故障诊断界面包括具有特殊功能的输入线,如能在系统中设置出现灾难性故障时,关闭PWM输出的功能。
以洗碗机为例,若是驱动设备由于积聚的废物而阻塞,这就可以够阻止电机继续旋转。
几种PWM调制方法
引言采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
PWM控制技术就是以该结论为理论基础,对半导体开关器件的导通和关断进行控制,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需要的波形。
按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。
PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在上世纪80年代以前一直未能实现。
直到进入上世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用。
随着电力电子技术、微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论、非线性系统控制思想的应用,PWM控制技术获得了空前的发展。
到目前为止,已出现了多种PWM控制技术,根据PWM控制技术的特点,到目前为止主要有以下8类方法。
1 相电压控制P WM1.1 等脉宽PWM法[1]VVVF(Variab le Voltag e Variab le Freque ncy)装置在早期是采用PAM(PulseAmplit ude Modula tion)控制技术来实现的,其逆变器部分只能输出频率可调的方波电压而不能调压。
等脉宽PWM法正是为了克服PAM法的这个缺点发展而来的,是PWM法中最为简单的一种。
它是把每一脉冲的宽度均相等的脉冲列作为PW M波,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。
相对于PAM法,该方法的优点是简化了电路结构,提高了输入端的功率因数,但同时也存在输出电压中除基波外,还包含较大的谐波分量。
MC9S12XS128之脉冲宽度调制PWM
半年前就开始写PWM的程序了,那时候只是用来控制电机和舵机。
最近在烦着摄像头的显示问题,再次探究PWM,看能不能找到出路。
我数了一下,整个PWM模块中,总共有37个寄存器。
不过把这些寄存器的功能都理了一下,发现:也不过这么一回事。
PWM就是脉冲宽度调制,是英文“Pulse Width Modulation”的缩写,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
在XS128中,PWM主要就是通过设置相关的寄存器,让PWM0~PWM7引脚输出一定周期一定占空比的矩形波。
输出的矩形波的周期和占空比在输出的过程中,可以通过改变相关寄存器的值来改变的。
电机和舵机就这利用这点来控制期速度和转向的。
不过观察了一下,似乎在112引脚封装的芯片中才有PWM0到PWM7八个通道的引脚输出,而在80引脚封装的芯片中只有七个通道的引脚输出,没有PWM6的引脚输出。
接下来写一下各个寄存器的功能和设置方法:一、PWME:各通道使能寄存器明显,当某位置1时,相应通道的PWM就打开了。
置0时,就是禁止该通道的PWM。
二、PWMPOL:极性设置寄存器这个寄存器可以设置相应通道的PWM波在每个周期内是先出现高电平后低电平,或是先低电平后高电平。
PPOLn=1:n 通道对外输出波形先是高电平然后再变为低电平。
PPOLn=0:n通道对外输出波形先是低电平然后再变为高电平。
这个设置与占空比的计算有关。
三、PWMCLK:时钟选择寄存器PWM模块中共有四个时钟,分别为A、B、SA、SB。
对于第0、1、4、5通道,PCLKn=0时,则其通选择的是时钟A;当PCLKn=1时,其通道选择的是时钟SA。
对于2、3、6、7通道,PCLKn=0时,其通道选择的是时钟B,当PCLKn=1时,其通道选择的是时钟SB。
对于这四种时钟,后面还有介绍。
四、PWMCAE:对齐方式选择寄存器当某位置1时,则该通道为居中对齐输出方式。
置0时,则该通道为左对齐输出方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S12微控制器PWM模块是由独立运行的8位脉冲计数器PWMCNT、两个比较寄存器PWMPER和PWMDTY组成。
1、左对齐方式
在该方式下,脉冲计数器为循环递增计数,计数初值为0 。
当PWM使能后,计数器PWMCNT从0开始对时钟信号递增计数,开始一个输出周期。
当计数值与占空比常数寄存器PWMDTY相等时,比较器1输出有效,将触发器置位,而PWMCNT继续计数;当计数值与周期常数寄存器PWMPER相等时,比较器2输出有效,将触发器复位,同时PWMCNT也复位,结束一个输出周期。
原理参照图14:
图14 PWM左对齐方式
2、中心对齐方式
在该方式下,脉冲计数器为双向计数,计数初值为0 。
当PWM使能后,计数器PWMCNT从0开始对时钟信号递增计数,开始输出一个周期。
当计数器与占空比常数寄存器PWMDTY相等时,比较器1输出有效,触发器翻转,而PWMCNT继续计数,当计数值与周期常数PWMPER相等时,比较器2输出有效,此时改变PWMCNT的计数方向,使其递解计数;当PWMCNT再次与PWMDTY 相等时,比较器1再一次输出有效,使触发器再次翻转,而PWMCNT继续递减计数,等待PWMCNT减回至0,完成一个输出周期。
原理参照图15:
图15 中心对齐方式
3、周期计算方法
左对齐方式:
输出周期 = 通道周期× PWMPERx
中心对齐方式:
输出周期 = 通道周期× PWMPERx × 2
4、脉宽计算方法
左对齐方式:
占空比 = [ (PWMPERx - PWMDTYx) / PWMPERx ] × 100%中心对齐方式:
占空比 = [ PWMDTYx / PWMPERx ] × 100%。