基于Matlab的直流电动机双闭环调速系统研究
基于MATLAB的直流调速控制系统设计研究

毕业设计
毕业设计任务书
设计题目:基于 MATLAB 的直流调速控制系统设计研究 系部: 学生: 机械工程系 专业: 机械电子工程 专业负责人: 学号:
指导教师:
ቤተ መጻሕፍቲ ባይዱ
1.设计的主要任务及目标 本设计要求设计者能设计出一个较好的双闭环直流调速系统。 了解直 流 调 速 的 原 理 和 方 法 ,比 较 各 种 调 速 方 法 的 特 点 与 不 足 。本 课 题 还 要 求 研 究 MATLAB 与 Simulink 在 控 制 方 面 的 应 用 , 掌 握 仿 真 程 序 的 编 写 与 Simulink 模 块 参 数 的 设 置 。 2.设计的基本要求和内容 1. 主要调速方法选择,电路选择,调节器调节方式选择 2. 建立系统的数学模型和仿真模型 3. 系统参数的设定与校正 4. 编写仿真程序并进行仿真实验和分析实验结果 3.主要参考文献 [1] 陈伯时 自动控制系统 机械工业出版社 1981.7 [2] 李先允 自动控制系统 高等教育出版社 2003.2 [3]刘坤.MATLAB 自控原理习题精解[M].北京:国防工业出版社,2004 [4] 张葛祥,李娜.MATLAB 仿真技术与应用.清华大学出版社.2003. 4.进度安排 设计各阶段名称 1 2 3 4 5 查阅相关文献资料,并撰写开题报告 分析并确定系统的设计方案 系统各部分的设计和实验 对仿真结果进行研究和分析 整理毕业设计相关资料,准备答辩 起 止 日 期
基于MATLAB的直流电机双闭环调速系统设计
摘要直流电机双闭环调速系统是一个复杂的自动控制系统,是目前直流调速系统中的主流设备,具有调速范围宽、平稳性好、稳速精度高等优点,在理论和实践方面都是比较成熟的系统,在拖动领域中发挥着极其重要的作用。
由于直流电机双闭环调速是各种电机调速系统的基础,本文从直流电机的基本特性进行双闭环直流电机设计,最后用实际系统进行工程设计,并采用MATLAB/SIMULINK进行仿真。
对于直流电机双闭环调速系统,在设计和调试过程中有大量的参数需要计算和调整,运用传统的设计方法工作量大,系统调试困难。
本文对直流电机双闭环调速系统进行辅助设计,选择调节器结构,进行参数计算和近似校验,根据给出和计算出的相应参数,建立起制动、抗电网电压扰动和抗负载扰动的MATLAB/SIMULINK仿真模型,分析转速和电流的仿真波形,并进行调试,使直流电机双闭环调速系统趋于完善、合理。
仿真结果证明了该方法的可行性和合理性。
关键词:直流调速,双闭环系统,电流调节器,转速调节器,计算机仿真AbstractThe double closed loop direct current velocity modulation system is a complex automatic control system, is in the present direct current velocity modulation system mainstream equipment, has the velocity modulation scope width, the stability is good, the steady fast precision higher merit, in the theory and the practice aspect all is the quite mature system, in drives in the domain to play the extremely vital role.Because the direct current machine double closed loop velocity modulation is each kind of electrical machinery velocity modulation system foundation, from the direct current machine basic characteristic conducts the double closed loop direct current machine design method research, finally uses the actual system to carry on the engineering design, and uses MATLAB/Simulink to carry on the simulation.Regarding the double closed loop direct current velocity modulation system, has the massive parameters in the design and the debugging process to need to calculate and to adjust, the utilization tradition design method work load is big, system debugging difficulty.This article carries on the assistance design to the double closed loop direct current velocity modulation system, chooses the regulator structure, carries on the parameter computation and the approximate verification, according to produces the corresponding parameter which and calculates, establishes applies the brake, the anti- electrical network voltage perturbation and the anti-load perturbation MATLAB/Simulink simulation model, the analysis rotational speed and the electric current simulation profile, and carries on the debugging, enable the double closed loop direct current velocity modulation system to tend to the consummation, is reasonable. The simulation result has proven this method feasibility and the rationality.Keywords:Speed control of DC-drivers,Double-closed-loop,Current regulator,Speed regulator,Computer simulation目录摘要 (I)Abstract........................................................... I I 目录........................................................... I II 1.绪论. (1)1.1 课题背景 (1)1.2 课题研究的目的和意义 (1)1.3 论文的主要内容 (2)2.直流电动机调速系统 (4)2.1 直流电动机简介 (4)2.1.1 直流电动机的工作原理 (4)2.1.2 直流电动机的运行特性 (5)2.1.3 直流电动机的起动与调速 (6)2.2 转速控制的要求和调速指标 (7)3.方案选择及系统工作原理 (9)3.1 电动机参数及设计要求 (9)3.2 方案选择及系统框图 (9)3.2.1 方案一:直流电机单闭环调速系统 (9)3.2.2 方案二:直流电机双闭环调速系统 (10)3.2.3 方案三:双闭环脉宽调速系统 (11)3.3 系统工作原理简介 (11)3.3.1 双闭环调速系统静态特性 (11)3.3.2 双闭环系统启动过程分析 (14)3.3.3 双闭环调速系统的动态抗扰动性能 (17)3.3.4 双闭环调速系统中两个调节器的作用 (18)4.双闭环调速系统的设计 (19)4.1 双闭环直流调速系统总体设计方案 (19)4.2 主电路设计与参数计算 (20)4.2.1 主电路原理图 (20)4.2.2 整流变压器的设计 (21)4.2.3 晶闸管元件选择 (23)4.2.4 电抗器参数的计算 (24)4.2.5 励磁电路 (26)4.2.6 三相桥式全控整流电路 (26)4.2.7 晶闸管触发电路 (28)4.3 直流调速系统的保护 (30)4.3.1 过电压保护 (30)4.3.2 电流保护 (33)4.4 控制电路设计 (34)4.4.1 电流调节器的设计 (35)4.4.2 转速调节器的设计 (37)5.调速系统的仿真 (40)5.1.1 MATLAB简介 (40)5.1.2 MATLAB的安装 (41)5.1.3 MATLAB的启动运行 (41)5.1.4 MATLAB的帮助文件 (41)5.1.5 MATLAB所定义的特殊变量及其意义 (41)5.1.6 MATLAB工具箱及SIMULINK简介 (42)5.2 调速系统仿真模型的建立 (43)5.3 仿真结果 (43)5.4 仿真结果分析 (46)结论 (47)参考文献 (48)致谢 (49)附录 A (50)1.绪论1.1 课题背景直流调速是现代电力拖动自动控制系统中发展较早的技术。
基于MATLAB的直流电机双闭环调速系统的设计与仿真
基于MATLAB的直流电机双闭环调速系统的设计与仿真直流电机双闭环调速系统是一种常见的控制系统,常用于工业生产中对电机速度的精确控制。
本文将基于MATLAB软件进行直流电机双闭环调速系统的设计与仿真,包括系统设计、参数设置、控制策略选择、系统仿真以及性能分析等方面。
文章将以1200字以上的篇幅进行详细阐述。
一、系统设计直流电机双闭环调速系统由速度环和电流环构成。
速度环控制系统的输入为速度设定值和电机实际速度,输出为电机期望电压;电流环控制系统的输入为速度环输出的电压和电机实际电流,输出为电机实际电压。
通过控制电机的期望电压和实际电压,达到对电机速度的调控。
二、参数设置在进行系统仿真之前,需要确定系统中各个参数的值。
包括电机的额定转矩、额定电压、电感、电阻等参数,以及控制环节的比例增益、积分增益、微分增益等参数。
这些参数的选择会影响系统的稳定性和动态性能,需要根据实际情况进行调整。
三、控制策略选择常见的控制策略包括PID控制、PI控制、PD控制等。
在直流电机双闭环调速系统中,可以选择PID控制策略。
PID控制器由比例环节、积分环节和微分环节组成,可以提高系统的稳定性和响应速度。
四、系统仿真在MATLAB中进行直流电机双闭环调速系统的仿真,可以使用Simulink模块进行搭建。
根据系统设计和参数设置,搭建速度环和电流环的控制器,连接电机实际速度和电机实际电流的反馈信号,输入速度设定值和电机期望电流,输出电机期望电压。
通过仿真可以得到系统的动态响应曲线,评估系统的性能。
五、性能分析在仿真结果中,可以分析系统的静态误差、超调量、调整时间等指标,评估系统的控制性能。
通过参数调整和控制策略更改等方式,可以优化系统的控制性能,使系统达到更好的调速效果。
总结:本文基于MATLAB软件对直流电机双闭环调速系统进行了设计与仿真。
通过系统设计、参数设置、控制策略选择、系统仿真以及性能分析等步骤,可以得到直流电机双闭环调速系统的动态响应曲线,并通过参数调整和控制策略更改等方式,优化系统的控制性能。
双闭环直流调速系统的设计与仿真毕业设计论文
本科毕业设计(论文)题目:双闭环直流调速系统的设计与仿真研究Graduation Design (Thesis)Design and Simulation of Double Loop DC Motor Control SystemByWu JieSupervised byAssociate Prof. Zhang zhenyanDepartment of Automation EngineeringNanjing Institute of TechnologyMay, 2014摘要为了提高运动控制系统在实际工程中的应用效率,本文介绍了直流调速系统的工程设计方法[1],利用 MATLAB软件,对直流调速系统进行数学建模和系统仿真的研究。
所给出的仿真方法,可以灵活地调节系统的参数,从而获得理想的设计结果,并对设计出的系统进行分析。
建立调节器工程设计方法所遵循的原则是:1)概念清楚、易懂。
2)计算公式简明、好记。
3)不仅给出参数计算公式,而且指明参数调节方向。
4)能考虑饱和非线性控制的情况,同时给出简单的计算公式。
5)适合于各种可以简化成典型系统的反馈控制系统[2]。
由于这个课题相对简单,我在里面加入了相关性的内容以丰富本课题的广度和深度。
在本设计中,我加入了三种简单的单闭环直流调速系统,并且通过对它们进行仿真分析,比较找出了它们的不足之处,从而更明显地体现了双闭环直流调速系统的优越性。
并且通过对两种典型的双闭环直流调速系统进行仿真分析,从而更好地理解和运用双闭环直流调速系统[3]。
关键词:直流电动机;双闭环调速;MATLAB;仿真;直流调速系统;直流脉宽调制;工程设计方法ABSTRACTIn order to raise application efficiency of the motion control system in actual project ,this article discussed the engineering design methods of the speed-governing system of DC motor. The mathematical modeling and system simulation of direct current governor system are researched by means of MATLAB platform . The simulation method can adjust the system controller parameters flexibly, so as to achieve the ideal design results, and the design of the system are analyzed.A controller design method is the principles of:(1)The concept of clear, easy to understand.(2)Simple formula, easy to remember.(3)Not only gives the parameter calculation formula, and indicates the parameter adjustment direction.(4)Can consider the saturation nonlinear control, and gives a simple formula.(5)Suitable for all kinds of feedback control systems can be simplified into a typical system.Because this subject is relatively simple, I joined the correlation content inside to enrich the breadth and depth of the subject. In this design, I added three simple single loop DC speed regulation system, and then analyze them, compared to find their deficiencies, and thus more clearly showed the superiority of double closed loop DC speed regulating system. And through the simulation analysis of two kinds of typical double loop DC speed control system, so as to better understand and use the double loop DC speed control system.Keywords: DC motor, double closed loop,MATLAB,Simulation,V-M,PWM-M,The engineering design method目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 课题研究背景 (1)1.2 直流调速系统国内外研究现状 (1)1.3 研究双闭环直流调速系统的意义 (2)1.4 论文的主要研究内容 (2)第二章仿真软件以及相关硬件简介 (3)2.1 MATLAB/Simulink仿真平台 (3)2.2 仿真的数值算法 (3)2.3 工程设计法 (4)2.4 直流电动机 (4)第三章简单闭环调速系统的设计与仿真 (5)3.1 单闭环有静差转速负反馈调速系统的设计与仿真 (5)3.2 单闭环无静差转速负反馈调速系统的设计与仿真 (11)3.3 带电流截止负反馈的转速反馈系统的设计与仿真 (13)3.4 简单闭环调速系统的优缺点比较 (15)第四章转速、电流双闭环直流调速系统的设计与仿真 (17)4.1 转速、电流双闭环调速系统的设计与仿真 (17)4.2 V-M直流调速系统的设计与仿真 (19)4.3 PWM-M直流调速系统的设计与仿真 (26)第五章总结与展望 (34)致谢 (35)参考文献 (36)第一章绪论1.1 课题研究背景在现代化的工业生产过程中,许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求有良好的稳态、动态性能[4]。
基于MATLAB的直流电机调速系统
绪论直流调速是指人为地或自动地改变直流电动机的转速,以满足工作机械的要求。
从机械特性上看,就是通过改变电动机的参数或外加工电压等方法来改变电动机的机械特性,从而改变电动机机械特性和工作特性机械特性的交点,使电动机的稳定运转速度发生变化。
直流调速系统,特别是双闭环直流调速系统是工业生产过程中应用最广的电气传动装置之一。
广泛地应用于轧钢机、冶金、印刷、金属切削机床等许多领域的自动控制系统中。
它通常采用三相全控桥式整流电路对电动机进行供电,从而控制电动机的转速,传统的控制系统采用模拟元件,如晶体管、各种线性运算电路等,虽在一定程度上满足了生产要求,但是因为元件容易老化和在使用中易受外界干扰影响,并且线路复杂、通用性差,控制效果受到器件性能、温度等因素的影响,从而致使系统的运行特性也随之变化,故系统运行的可靠性及准确性得不到保证,甚至出现事故。
双闭环直流调速系统是一个复杂的自动控制系统,在设计和调试的过程中有大量的参数需要计算和调整,运用传统的设计方法工作量大,系统调试困难,将SIMULINK 用于电机系统的仿真研究近几年逐渐成为人们研究的热点。
同时,MATLAB软件中还提供了新的控制系统模型输入与仿真工具SIMULINK,它具有构造模型简单、动态修改参数实现系统控制容易、界面友好、功能强大等优点,成为动态建模与仿真方面应用最广泛的软件包之一。
它可以利用鼠标器在模型窗口上“画”出所需的控制系统模型,然后利用SIMULINK提供的功能来对系统进行仿真或分析,从而使得一个复杂系统的输入变得相当容易且直观。
本文采用工程设计方法对转速、电流双闭环直流调速系统进行辅助设计,选择适当的调节器结构,进行参数计算和近似校验,并建立起制动、抗电网电压扰动和抗负载扰动的MATLAB/SIMULINK仿真模型,分析转速和仿真波形,并进行调试,使双闭环直流调速系统趋于完善、合理。
2MATLAB简介MATLAB是一门计算机编程语言,取名来源于Matrix Laboratory,本意是专门以矩阵的方式来处理计算机数据,它把数值计算和可视化环境集成到一起,非常直观,而且提供了大量的函数,使其越来越受到人们的喜爱,工具箱越来越多,应用范围也越来越广泛。
双闭环不可逆直流调速系统课程设计心得(matlab仿真设计)【模版】
双闭环晶闸管不可逆直流调速系统设计(matlab simulink 仿真)前言许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求具有良好的稳态、动态性能。
而直流调速系统调速范围广、静差率小、稳定性好以及具有良好的动态性能,在高性能的拖动技术领域中,相当长时期内几乎都采用直流电力拖动系统。
双闭环直流调速系统是直流调速控制系统中发展得最为成熟,应用非常广泛的电力传动系统。
它具有动态响应快、抗干扰能力强等优点。
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI调节器的单闭环的调速系统可以再保证系统稳定的条件下实现转速无静差。
但如果对系统的动态性能要求较高,例如要求起制动、突加负载动态速降小等等,单闭环系统就难以满足要求。
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩。
在单闭环系统中,只有电流截止至负反馈环节是专门用来控制电流的。
但它只是在超过临界电流值以后,强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
在实际工作中,我们希望在电机最大电流限制的条件下,充分利用电机的允许过载能力,最好是在过度过程中始终保持电流(转矩)为允许最大值,使电力拖动系统尽可能用最大的加速度启动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这时,启动电流成方波形,而转速是线性增长的。
这是在最大电流转矩的条件下调速系统所能得到的最快的启动过程。
随着社会化大生产的不断发展,电力传动装置在现代化工业生产中的得到广泛应用,对其生产工艺、产品质量的要求不断提高,这就需要越来越多的生产机械能够实现制动调速,因此我们就要对这样的自动调速系统作一些深入的了解和研究。
本次设计的课题是双闭环晶闸管不可逆直流调速系统,包括主电路和控制回路。
主电路由晶闸管构成,控制回路主要由检测电路,驱动电路构成,检测电路又包括转速检测和电流检测等部分。
基于MATLAB的数字PID直流电机调速系统
基于MATLAB的数字PID直流电机调速系统本文主要研究基于MATLAB的数字PID直流电机调速系统。
直流电机是工业生产中常用的电机,其调速系统对于保证生产效率和质量至关重要。
因此,研究直流电机调速系统的控制方法和参数设计具有重要意义。
本文将首先介绍直流电机的数学模型和调速系统的工作原理,然后探讨常规PID控制器的设计方法和参数控制原理,最后通过MATLAB仿真实验来研究数字PID控制器的设计和应用。
2 直流电机调速系统的数学模型直流电机是一种常见的电动机,其数学模型可以用电路方程和动力学方程来描述。
电路方程描述了电机的电气特性,动力学方程描述了电机的机械特性。
通过这两个方程可以得到直流电机的数学模型,为后续的控制器设计提供基础。
3 直流电机调速系统的工作原理直流电机调速系统是通过控制电机的电压和电流来改变电机的转速。
其中,电压和电流的控制可以通过PWM技术实现。
此外,还可以通过变换电机的电极连接方式来改变电机的转速。
直流电机调速系统的工作原理是控制电机的电压和电流,从而控制电机的转速。
4 常规PID控制器的设计方法和参数控制原理常规PID控制器是一种常见的控制器,其控制原理是通过比较实际输出值和期望输出值来调整控制器的参数,从而实现控制目标。
常规PID控制器的参数包括比例系数、积分系数和微分系数,这些参数的选取对于控制器的性能有重要影响。
常规PID控制器的设计方法是通过试错法和经验公式来确定参数值。
5 数字PID控制器的设计和应用数字PID控制器是一种数字化的PID控制器,其优点是精度高、可靠性强、适应性好。
数字PID控制器的设计方法是通过MATLAB仿真实验来确定控制器的参数值。
数字PID控制器在直流电机调速系统中的应用可以提高系统的控制精度和稳定性。
6 结论本文主要研究了基于MATLAB的数字PID直流电机调速系统,介绍了直流电机的数学模型和调速系统的工作原理,探讨了常规PID控制器的设计方法和参数控制原理,最后研究了数字PID控制器的设计和应用。
基于MATLAB的直流调速系统参数整定设计
为三阶对角阵, 使各状态加权值相等 , 对角线元素值
维普资讯
采
矿
技
术
. = 1 0 3 S, r ・71 = 1 ・ 3 0, 071
Y
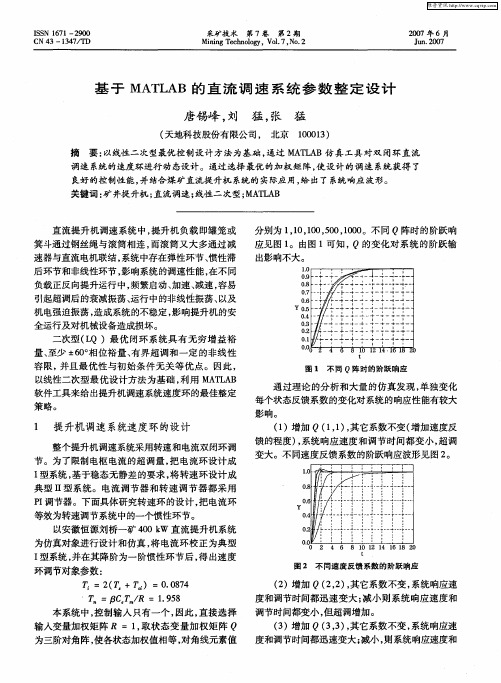
调节时间都变小 , 但超调增加。 接着 , 固定 Q为三阶单位阵 , 分别取 R =1 1 , ,O 10 50 10 。系统 阶跃响应波形见图 3 0, , 0 0 0 。
从 图 3看 出 , 随着 的增 大 , 调 量 逐 渐增 加 , 超
●
/
响应时间和调节时间变长 , 其原 因是闭环极点位置 的变化 , 主导极点不断向虚轴移动 , 因此系统阶跃响 应特 性 变差 。
直 流提 升 机 调 速 系统 中 , 升 机 负 载 即罐 笼 或 提
分别为 11 , 0 50 10 。不同 Q阵时的阶跃响 , 1 ,0 , 0 0 0 0
应 见 图 1 由 图 1可知 ,Q的 变 化对 系统 的 阶跃 输 。 出影 响不大 。
箕斗通过钢丝绳与滚筒相连 , 而滚筒又大多通过减 速器与直流电机联结 , 系统 中存在弹性环节、 惯性滞
后环 节 和非 线性 环节 , 响系统 的调 速 性能 , 影 在不 同
负载正反向提升运行 中, 频繁启动、 加速 、 减速 , 容易 引起超调后的衰减振荡、 运行中的非线性振荡、 以及 机 电强 迫振 荡 , 造成 系统 的不稳 定 , 响提升 机 的安 影
全运 行及 对 机械 设备 造成 损坏 。 二 次型 ( Q )最 优 闭 环 系统 具 有 无 穷 增 益 裕 L 量、 至少 -6 。 位裕 量 、 界 超 调 和 一 定 的非 线 性 40相 - 有 容 限 ,并且 最 优 性 与初 始 条 件 无 关 等 优 点 。 因此 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图5双闭环直流电机调速系统整体模型图
图6转速输出波形图
第三章总结展望
通过直流电机转速、电流双闭环调速系统的研究和仿真模型的建立
对电流调节器和转速调节器有了一定的了解。并且运用MATLAB软件和Simulink模块进行仿真和分析,更加直观地了解工程的设计。同时让我对Matlab仿真平台有了较多的认识,也增强了分析问题和解决问题的能力,为以后的设计工程增加了经验。
b.对负载变化起抗扰作用
c.其输出限幅值决定电机允许的最大电流
(1)时间常数的确定
转速环小时间常数近似处理取TΣn=1/KI+Ton =2TΣi+0.02=(2×0.0037+0.02)s=0.027 4s
(2)转速调节器结构选择和参数计算
因为含有积分环节,可按照典型II型系统设计按照设计要求选用PI型调节器,其传递函数WASR(S)=Kn(τns+1)/τns ,按给随和抗干扰性能都比较好的原则,取h=5,则ASR的超前时间常数为τn=hTΣn =5×0.027 4 =0.137 s;
参考文献
[1]王燕平.控制系统仿真与CAD.北京:机械工业出版社,2011
[2]胡寿松.自动控制原理简明教程.北京:科学出版社,2008
[3]刘春艳,闻玉凤.基于MATLAB/Simulink双闭环直流调速系统的仿真研究山西大同大学学报:自然科学版,2014
[4]大功率直流调速系统研究与设计大连海事大学,2013.
(4)近似条件的校验
电流环截止频率ωci=KI=135.1,晶闸管装置传递函数近似条件wci<1/3TS=1/3*0.0017s=196.1s-1满足近似条件;忽略反电动势变化对电流
环动态影响的条件满足近似条件ωci >3/(1/TmTl)^0.5=310.112×0.031=50.91s-1;电流环小时间常数近似处理条件满足近似条件ωci <1/3(1/TSToi)^0.5=1/3(1/0.001 7×0.002)^0.5=180.8s-1,电流环可以达到动态给随性能指标为σi≤4.3% <5%
利用MATLAB软件的Simulink
模块建立的双闭环调速系统整体模型如图2所示。
图2电流调节器的仿真建模
电流仿真波形如图3所示
图3电流仿真波形
2.转速调节器的设计
转速调节器的作用:
a.转速调节器是调速系统的主导调节器,它使转速n很快地跟随给定电压变化,稳态时可减小转速误差,如果采用PI调节器,则可实现无静差。
1、电流调节器的设计
(1)电流调节器的作用:
a.作为内环的调节器,在外环转速的调节过程中,它的作用是使电流紧紧跟随其给定电压(即外环调节器的输出量)变化
b.对电网电压的波动起及时抗扰的作用
c.在转速动态过程中,保证获得电机允许的最大电流,从而加快动态过程
d.当电机过载甚至堵转时,限制电枢电流的最大值,起快速的自动保护作用。一旦故障消失,系统立即自动恢复正常。这个作用对系统的可靠运行来说是十分重要的。
E(S)/(Id(s)-IdL(s))= R/Tms
TL负载转矩, GD2飞轮惯量, Cm =30πCe转矩系数, Tl电枢回路电磁时间常数Tl=LR ,电力拖
动系统机电时间常数Tm = GD2R375CeCm
三具体设计方法
依据工程设计方法,首先选择调节器的结构,
满足稳态精度的同时保证系统稳定,接下来选择调
章节
第一章概述与引言
直流调速是指人为地或自动地改变直流电动机的转速,以满足工作机械的要求。从机械特性上看,就是通过改变电动机的参数或外加工电压等方法来改变电动机的机械特性,从而改变电动机机械特性和工作特性机械特性的交点,使电动机的稳定运转速度发生变化。直流电动机具有良好的起、制动性能,宜于在广泛范围内平滑调速,在轧钢机、矿井卷扬机、挖掘机、海洋钻机、金属切削机床、造纸机、高层电梯等需要高性能可控电力拖动的领域中得到了广泛的应用。
则转速环开环增益为
KN = (h+1)/2h2T2Σn=6/(2×52×0.02742s-2 )=159.84-2;
ASR比例系数为Kn = (h+1)βCeTm/2hαRTΣn
=(6×0.008 8×1.82×0.112)/2×5×0.026 7×0.14×0.027 4=10.5
3、双闭环直流调速系统建模
近年来,交流调速系统发展很快,然而直流拖动系统无论在理论上和实践上都比较成熟,并且从反馈闭环控制的角度来看,它又是交流拖动控制系统的基础,所以直流调速系统在生产生活中有着举足轻重的作用。本设计分析直流电机了的数学模型,利用Matlab中的Simulink对直流电机进行建模,并在此基础上进行双闭环调速系统仿真。
第二章各部分设计方案及工作原理
一、直流电机双闭环调速系统的工作原理
为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,其中,转速调节器是转速跟随给定电压变化,采节器跟随给定电压,对电网电压波动起抗干扰作用,加快动态过程。调速系统关键是转速和电流调节器的设计。二者之间实行串联连接。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置。从闭环结构上看,电流调节环在里面,叫做内环,转速调节环在外边,叫做外环,这样就形了转速、电流双闭环调速系统。把转速调节器ASR的输出当作电流调节器ACR的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置GT,TA为电流传感器,TG为测速发电机.从闭环结构上看,电流调节环在里面,叫做内环,转速调节环在外边,叫做外环,这样就形成了如图1所示的转速电流双闭环调速系统
河南工业大学
控制系统仿真
姓名:邹华
班级:自动化1502
学号:201523020221
成绩:
2017年6月20日
设计题目
基于Matlab的直流电动机双闭环调速系统研究
设计内容和要求
分析直流电机的数学模型,利用Matlab中的Simulink对直流电机进行建模,并在此基础上进行双闭环调速系统仿真。
报告
主要
图1转速、电流双闭环调速系统
二、直流电机的数学模型
他励直流电动机等效电路的动态电压方程为
Udo=RId+L(dId/Dt)+E
轴上动力学方程为
Te-TL =GD2/375Dn/Dt
额定励磁下感应电动势为
E=Cen
电磁转矩为
Te=CmId
进行整理并取拉氏变换得
Id(s)/(Udo(s)-E(S))=(1/R)/(Tls+1)
节器的参数,满足动态性能指标的要求,以某双闭环
直流调速系统为例,采用三相桥式整流电路,已知参
数为PN =555KW, UN =750V, IN =760A, nN =375
r/min,电动势系数Ce=1.82V·min/r,电枢回路总
电阻R=0.14Ψ,允许电流过载倍数λ=1.5,触发
整流环节的放大倍数KS =75,电磁时间常数Tl
=0.031s,机电时间常数Tm =0.112s,电流反馈时
间常数Toi=0.002s,转速反馈滤波时间常数Ton =
0.02s。且调节器输入输出电压U*nm =U*im =Ucm =
10V,调节器输入电阻R0=40KΨ。设计指标:稳态
无静差,电流超调量σi≤5%,空载起动到额定转速
时的转速超调量σn≤10%
(2)反馈参数和时间常数的确定
反馈参数β=U*im/λIN=10/1.5×760=0.008 8V/A,α=U*nm/nN=10/375=0.0267V/(r/min).
查表得整流装置滞后时间常数TS =0.001 7s则电流环小时间常数TΣi=TS +Toi=0.001 7 +0.002 =0.003 7 s
(3)电流调节器结构选择和参数计算
根据设计指标稳态无静差,电流超调量σi≤5%,可按照典型I型系统设计此电路调节器,选用PI型电流调节器,传递函数为WACR (S) =Ki(τis+1)/Τis
电流调节器超前时间常数τi=Ti=0.003 1s;
电流环开环增益和电流调节器的比例系数分别为Kl=0.5/TΣi=0.5/0.003 7s=135.1s-1和Ki =KlτiR/KSβ=135.2×0.031×0.1475×0.008 8=0.888