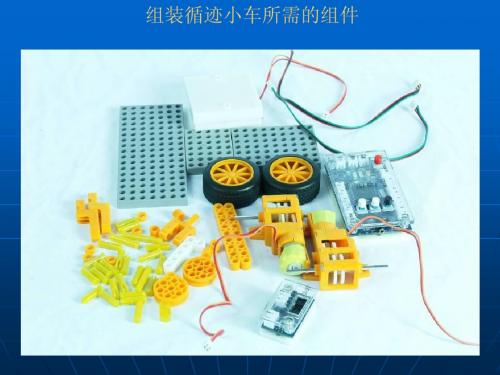
简易循迹小车装配图文资料讲解
循迹小车全资料

寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
《自动循迹小车》课件

,
汇报人:
目录
01 添 加 目 录 项 标 题 03 自 动 循 迹 小 车 的 硬
件设计
05 自 动 循 迹 小 车 的 调 试与测试
02 自 动 循 迹 小 车 的 概 述
04 自 动 循 迹 小 车 的 软 件设计
06 自 动 循 迹 小 车 的 优 化与改进
Part One
自动循迹小车的组成
传感器:用于检测道路信 息,如红外传感器、超声 波传感器等
控制器:用于处理传感器 信息,控制小车的运动, 如单片机、微控制器等
驱动系统:用于驱动小车 运动,如直流电机、步进 电机等
机械结构:用于支撑小车, 如底盘、车轮等
电源系统:为小车提供电 力,如电池、电源适配器 等
软件系统:用于控制小车 运动,如嵌入式操作系统、 控制算法等
驱动方式: PWM控 制或H桥 驱动
驱动电路: 电源、控 制电路、 保护电路 等
驱动参数: 转速、扭 矩、电流 等
驱动性能: 响应速度、 稳定性、 效率等
驱动接口: 与主控板 的连接方 式及协议
传感器模块
传感器类型:红外传感器、超声波传感器等 传感器功能:检测障碍物、检测路径等 传感器安装位置:小车前端、侧面等 传感器工作原理:红外反射、超声波反射等
优化控制策略: 提高控制精度, 减少控制误差
优化硬件配置: 提高硬件性能, 减少硬件瓶颈
性能提升措施
优化算法:提高 小车的寻迹速度 和准确性
硬件升级:更换 更高性能的电机 和传感器
软件优化:优化 小车的控制程序, 提高响应速度和 稳定性
结构优化:改进 小车的结构设计, 提高其稳定性和 耐用性
应用拓展方向
循迹小车的组装说明(压缩)
循迹小车车身的组装
(注意连接扣、底板连接放置的位置)
万向轮的组装
(注意连接扣的长度连杆与万向轮支架连接的方向)
小车驱动电机的组装
(注意电机安装的位置)
车轮组件的组装
万向轮的装配
传感器固定装置的组装
(注意连接口、之型连杆连接的方向)
小车行走探测传感器的组装
循迹小车全观图
(电源部分与控制电路板组装未说明详见公司网站说明)
硬件连接示意图
循迹小车程序截图
循迹右电机分别连接在 主板所示的两个端口。 前进探测传感器左右传感器分别接在输入 口0、1口。 打开ZB2软件,打开所给程序资料,下载 到主板运行,若小车不能走黑线调整传感 器、电机的连接口。
简易电磁循迹智能小车PPT课件

2019/7/5
检测电磁线圈选用10mH的工字电感,这类电感的体积 小,Q值高,具有开放的磁芯等特点。
已知感应电动势的频率为f=20 kHz,感应线圈电感为 L= 10 mH ,可以计算出谐振电容的容量为:
标称电容与上述容值最为接近的电容为 6.8nF, 所以在实际电路中我们选用 6.8nF 的独石电容作为谐振电 容。该电容虽然误差比较大,测试中15个电容里面误差最小 的都有1453pF,但价格便宜。
Transition Page
本次设计中是通过判断小车偏移量,来调整小车位置,从而达到按规定路线行驶的要求。
赛车
小车位于轨道中心 小车偏右
小车偏左
小车左转
左传感器 弱 强 弱 无 无 弱 强
右传感器 弱 弱 强 弱 强 无 无
左电机 慢 慢 快 慢 快 停 停
逻辑判断表
右电机 慢 快 慢 停 停 慢 快
磁感线是以导体为圆心的一系列同心圆,由上述公式可知,当电 流I一定时,磁感应强度与距离导线中心的长度成反比。变化的磁 场通过感应线圈会产生感应电动势。因此在小车前方放置感应线 圈,根据磁场的大小产生相应感应电动势,驱动小车行进。根据 法拉第电磁感应定律可知,假设线圈半径为r,感应电动势为:
过渡页
目录页
Contents Page
第第一一章章并简列介概关要系 第第二二章章递设进计原关理系 第第三三章章循制环作过关程系 第四第章四章其他总结类型
过渡页
Transition Page
简介概要
技术背景
智能汽车这个概念是在半个世纪前提出,一些发达国家如德国、美国、 英国已将智能汽车用于社会服务,其拥有强大的控制、识别能功能。智 能汽车不仅可以用于生产、服务,大幅度提高我们的工作效率,同时给 予人们更多地便利及安全保障。智能汽车将会对未来交通系统带来巨大 的变革。然而目前所需要解决的最大问题便是无人驾驶汽车的安全问题。
巡线小车制作图解

巡线小车制作图解
做了一个巡线小车(技术不好,高手勿喷),需要电子元件有光敏电阻,电阻二极管,三极管,电位器等先上电路图:
(材料淘宝上都有卖,照相机的图传不上来,所以截的图)在上光敏电阻和二极管,这块洞洞板宽2个洞长5个空:
各个电子元件的位置,这块长10宽10个孔,连好后再把光敏电阻等用跳线连接(最后上跳线连法)
底盘和上面的洞洞板一样(万向轮用铜管和光敏电阻的引脚做的电机和皮带轮用牙签连接,一定要在前端留有一个口子长6宽2个孔)这几张用手机拍的还比相机好
全家福
安装最后的总体
对了车轮轴用牙签做的
(找不到轴)继续上图
如图把只要电路放在电机上,把电机和LED并联
完全是自己做的还有标记
电池是充电的
好,实物图上完了,上跳线(这个一步一步的,如果不按这样可能会像我一样很麻烦,电机并联到LED上)
最后上个跑道图(自己画的,要放大)
总之能不做小就不做小,如果太小难度就会太大。
简易循迹小车装配图文资料讲解
简易循迹小车装配图文资料讲解简易循迹小车装配图文教程一.电子元件装配顺序为由低到高,元件尽量紧贴电路板表面安装。
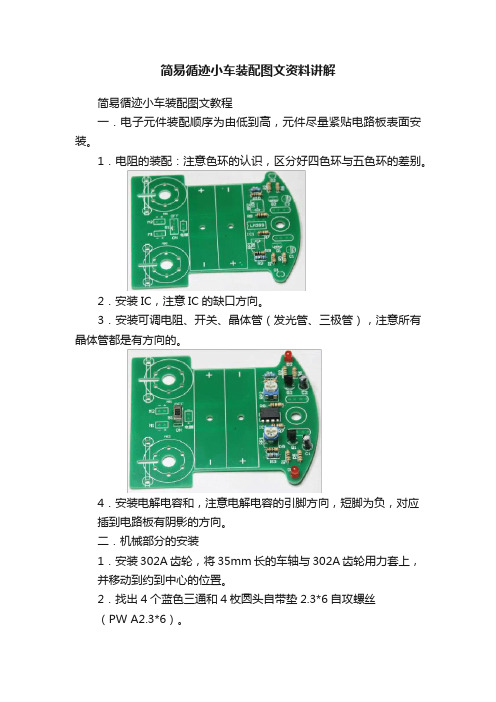
1.电阻的装配:注意色环的认识,区分好四色环与五色环的差别。
2.安装IC,注意IC的缺口方向。
3.安装可调电阻、开关、晶体管(发光管、三极管),注意所有晶体管都是有方向的。
4.安装电解电容和,注意电解电容的引脚方向,短脚为负,对应插到电路板有阴影的方向。
二.机械部分的安装1.安装302A齿轮,将35mm长的车轴与302A齿轮用力套上,并移动到约到中心的位置。
2.找出4个蓝色三通和4枚圆头自带垫2.3*6自攻螺丝(PW A2.3*6)。
3.先将内侧的两个三通用螺丝固定到电路板上。
4.将车轴和齿轮套入三通中,并移动齿轮位置,使齿轮在电路板的卡槽中,车轴刚好超出三通多一点,不超过1mm。
5.将另外两个三通套入车轴中并用螺丝固定到电路板上。
6.将蜗杆用力套入电机轴中,并压到接近电机轴承的位置,找出6-12枚2*3mm的圆头机丝螺丝用于固定电机。
7.将电机用螺丝固定到电路板上,一般每个电机固定3枚螺丝就OK了。
8.将车轮用力套入车轴上,并移动到接近电路板的位置。
(注意用力技巧,可以将车轴的另一端先靠到桌面等固定物上,适当用力敲打车轮到合适位置。
)9.将5*20的螺丝加配套螺母固定到电路板上,然后套上不锈钢盖形螺母作为万向轮使用。
三.安装剩余电路部分。
1.安装循迹红外发射与接收管,注意有正负方向的区别,使其高度略低于万向轮约3-5mm。
2.安装电池盒,电池盒通过不干胶粘到电路板上,注意位置必须准确,确保一次性成功,不可进行二次粘接。
连接电机导线,可以将过长的导线剪到合适的长度,新剥开的线头先要捻头并烫锡处理,线头长度不超过2mm。
电池盒用不干胶固定到电路板上,需特别注意电源的正负极不要接反,电机反转可以交换两条线的位置。
套件默认提供的是2节5号电池盒,可用2节碱性电池供电的(套件中不提供,需自备)。
智能循迹小车ppt文档全文预览

REPORTING
THANKS
感谢观看
别和跟踪。
优化控制算法
采用PID控制、模糊控制等算法, 提高小车行驶的稳定性和准确性。
完善硬件设计
优化电路设计、电机驱动、电源 管理等硬件模块,提升小车性能。
拓展应用场景
将智能循迹小车应用于仓储物流、 智能家居等领域,验证其实用性
和可靠性。
未来研究方向探讨
多传感器融合技术
研究如何将多种传感器信息进行融合, 提高小车的环境感知能力和适应性。
调试技巧和优化策略
调试技巧
在调试过程中,可以采用分模块调试的方法,逐个验证每个模块的功能是否正常;同时,可以利用串口通信等手 段,实时输出调试信息,帮助定位问题。
优化策略
针对循迹算法的优化,可以采用动态阈值调整的方法,提高轨迹检测的准确性;针对电机控制的优化,可以采用 PID控制算法,提高小车的行驶稳定性和速度控制精度。此外,还可以通过硬件升级、算法改进等手段,进一步 提高智能循迹小车的性能。
深度学习技术应用
探索深度学习在智能循迹小车中的应 用,如通过神经网络实现更复杂的路 径规划和决策。
多车协同控制技术
研究多辆智能循迹小车之间的协同控 制策略,实现更高效、灵活的群体协 作。
智能化与自主化
进一步提升小车的智能化水平,如实 现自主导航、避障、路径规划等功能, 使其更加适应复杂环境。
2023
2023
REPORTING
智能循迹小车ppt文档 全文预览
2023
目录
• 智能循迹小车概述 • 智能循迹小车硬件设计 • 软件编程与算法实现 • 性能测试与结果分析 • 挑战与解决方案探讨 • 总结与展望
2023
PART 01
循迹避障车制作装配图文教程

循迹避障车制作装配图文教程
一、 装配正面图
二、
装配反面图
三、
装配前视图
四、 循迹功能调试
五、 避障功能调试
常见问题解答:
1. 部分客户反映的电机无力,有时被卡住不转,用手转一下车轮,才能转动
解决办法:用高能电池,劣质低价电池电压低,电流不足,所以无法驱动。
实在不行的话用三节电池4.5V 供电,就动力十足了。
2. 只能循迹,不能避障
解决办法:镜面反光障碍物,黑色障碍物影响避障效果。
用白色或者其他颜色障碍物。
有的朋友是在室内测试避障,因为房间踢脚线是黑色瓷砖,所以不能避障。
3. 避障时车子只右转,不左转。
说明:这是由程序功能决定的。
我们的示范程序是这样设置的功能,无论前方左侧遇到障碍物还是前方右侧遇到障碍物,左侧车轮转动,右侧车轮停转,车子都是向右转动。
你可以改写程序,实现更多功能或者更改功能。
祝各位朋友制作成功!要给好评,全5分哟!拜托! 如果任何问题,可以旺旺、QQ 联系我们给予解决。
QQ:281459578 阿里旺旺:
zlinchuan。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简易循迹小车装配图文教程
一.电子元件装配顺序为由低到高,元件尽量紧贴电路板表面安装。
1.电阻的装配:注意色环的认识,区分好四色环与五色环的差别。
2.安装IC,注意IC的缺口方向。
3.安装可调电阻、开关、晶体管(发光管、三极管),注意所有晶体管都是有方向的。
4.安装电解电容和,注意电解电容的引脚方向,短脚为负,对应
插到电路板有阴影的方向。
二.机械部分的安装
1.安装302A齿轮,将35mm长的车轴与302A齿轮用力套上,
并移动到约到中心的位置。
2.找出4个蓝色三通和4枚圆头自带垫2.3*6自攻螺丝
(PW A2.3*6)。
3.先将内侧的两个三通用螺丝固定到电路板上。
4.将车轴和齿轮套入三通中,并移动齿轮位置,使齿轮在电路板的卡槽中,车轴刚好超出三通多一点,不超过1mm。
5.将另外两个三通套入车轴中并用螺丝固定到电路板上。
6.将蜗杆用力套入电机轴中,并压到接近电机轴承的位置,找出6-12枚2*3mm的圆头机丝螺丝用于固定电机。
7.将电机用螺丝固定到电路板上,一般每个电机固定3枚螺丝就OK了。
8.将车轮用力套入车轴上,并移动到接近电路板的位置。
(注意用力技巧,可以将车轴的另一端先靠到桌面等固定物上,适当用力敲打车轮到合适位置。
)
9.将5*20的螺丝加配套螺母固定到电路板上,然后套上不锈钢盖形螺母作为万向轮使用。
三.安装剩余电路部分。
1.安装循迹红外发射与接收管,注意有正负方向的区别,使其高度略低于万向轮约3-5mm。
2.安装电池盒,电池盒通过不干胶粘到电路板上,注意位置必须准确,确保一次性成功,不可进行二次粘接。
连接电机导线,可以将过长的导线剪到合适的长度,新剥开的线头先要捻头并烫锡处理,线头长度不超过2mm。
电池盒用不干胶固定到电路板上,需特别注意电源的正负极不要接反,电机反转可以交换两条线的位置。
套件默认提供的是2节5号电池盒,可用2节碱性电池供电的(套件中不提供,需自备)。
3.为减小红外发射管对接收管直射光的干扰,可以在接收管上套上3mm热缩管。
四.电路功能及调试
1.装配正面图
这两个孔接电机,电机如
果正负极接反,则反转。
注意三极管安装方向,不
要装反了。
IC半圆缺口与电路板上的
标记一致
调节右侧循迹灵敏度
调节左侧循迹灵敏度
电源开关
接电池盒,红色正极,黑
色负极
电解电容长脚正,短脚负
电池盒通过不干胶粘接到
电路板上,注意位置准确,
确保一次性到位。
发光二级管长脚正,短脚
为负极。
2.装配反面图
3. 装配前视图
4. 循迹功能调试
红外发射及接收管,安装高度与万向轮螺帽高相差约5mm 路
万向轮螺帽,底端由螺母固定紧。
电机由导线连接到电路板上的M1 M2位置,如果正负极装反,则电机反转。
如果装反,则对换连接即可。
减速蜗杆刚好达到齿轮中间,保证传动有力
车轮离电路板边缘约1-2mm 。
主要看下循迹的红外发射接收管安装高度,不能离地太高。
万向轮螺丝需先用螺母紧固到电路板上。
红外发射管发出红外线在白色区域被反射回去,接收管收到后,车轮转动,同侧LED 点亮。
红外发射管发出红外线在黑色区域被吸收而没有发射光,接收管没有收到反射光,车轮停转,同侧LED 同侧发射接收管对准黑色轨道,调节RP1,使同侧车轮刚好停转。
同侧发射接收管对准白色区域,调节RP2,使同侧车轮转动。
固定电机的螺丝一般3枚就OK 了。
五.常见问题解答:
1.部分客户反映的电机无力,有时被卡住不转,用手转一下
车轮,才能转动
解决办法:用高能电池,劣质低价电池电压低,电流不足,所以无法驱动。
实在不行的话用3.7V锂电池或三节电池4.5V 供电,就动力十足了。
2.循迹时有时跑出跑道。
说明:可以适当调节灵敏度,稍微改变接收管的位置试试。
也可以降低电压以减小转速来处理。
3.调节好的小车在不同光线环境或不同电压下可能需要重新调节。
注意事项:组装说明书的背面就是循迹小车的简易跑道,客户也可以直接用1.5~2.0厘米黑色的电工胶带直接粘贴在地面上设计成复杂的跑道就更好玩了。