能量回馈型超声波电动机的结构设计与特性分析
超声波电机的设计
任务书论文(设计)题目:超声波电机的设计学号:姓名:专业:指导教师:系主任:一、主要内容及基本要求超声波电机是国内外日益受到重视的一种新型驱动电机,通过查找相关文献,熟悉其工作原理和运行机理,结合本科所学机械各学科方面的知识,完成超声波电机结构部分的设计。
主要研究内容包括以下几个方面:1超声波电机的运行机理。
2定子谐振频率的计算。
3压电陶瓷换能器的设计和制作。
4定子的设计及制作。
5转子的设计及制作。
6编写设计说明书:设计说明书按设计程序编写。
基本要求:学习查阅文献,具备综合归纳资料的能力;综合运用本科阶段所学知识,分析与解决超声波电机结构设计过程中所遇问题;并利用AutoCAD软件绘制了其装配图和各个零件图;通过翻译3000字的外文资料获取国外在该行业的最新发展动态。
二、重点研究的问题理解超声波电机的工作原理和运行机理,弄清其结构特点,定子谐振频率的计算,定子的设计及制作,转子的设计及制作;理解超声波压电陶瓷和压电振子的特性,弄清超声波电机的振动特性及动力响应特性;理解超声波电机的驱动和控制及超声波电机的分析与设计。
设计一台超声波电机。
三、进度安排序号各阶段完成的内容完成时间1 选题第1周2 查阅与收集资料第2~5周3 超声波电机结构的设计第6~9周4 完成所要求图纸第10~11周5 完成设计说明书第12~13周6 进行最后的修改第14周7 答辩第15周四、应收集的资料及主要参考文献[1] 刘晋春,特种加工,第五版[M].机械工业出版社.2008[2] 史敬灼,超声波电机运动控制理论与技术.北京:科学出版社.2011.10[3] 胡敏强,金龙,顾菊平,超声波电机原理与设计. 北京: 科学出版社.2005[4] 姜楠,方光荣,刘俊标,束娜. 国内外超声波电动机驱动技术的最新进展. 微特电机. 2005.9[5] 赵淳生,对发展我国超声电机技术的若干建议.微电机.2006[6] 胡敏强,超声电动机的研究及其应用[J].微特电机.2000[7] 淮良贵,纪名刚,机械设计,第六版[M].北京:高等教育出版社,1996[8] 郑凯,杨义勇,胡仁喜.Solid Edge应用教程[M].清华大学出版社,2008.4[9] 芦亚萍,孟繁琴,袁云龙.超声波电机研究现状.微电机.2005[10] 杨明,阙沛文. 超声电机变频驱动源的设计与分析. 压电与声光。
超声波电机等效电路
超声波电机等效电路介绍超声波电机是一种利用超声波技术驱动电机运动的装置,它能够实现高效、精准的动力传输。
超声波电机利用超声波振动产生电磁感应,从而驱动电机运动。
为了更好地了解超声波电机的工作原理和性能,需要进行等效电路建模。
等效电路模型超声波电机可以用等效电路模型来描述,这有助于我们更好地理解其工作原理和性能。
超声波电机的等效电路模型一般包括以下几个部分:1. 激励电源激励电源为超声波电机提供动力驱动。
它可以是直流电源、交流电源或其他形式的能量输入。
2. 超声波振荡器超声波振荡器是超声波电机的核心部件,它通过产生超声波振动,实现与电机之间的能量转换。
超声波振荡器可以采用压电材料或磁致伸缩材料。
3. 电磁感应装置超声波电机通过电磁感应装置将超声波振动转换为电磁力,从而驱动电机运动。
电磁感应装置一般由线圈和磁铁组成。
4. 电机电机是超声波电机的输出部件,它将电磁力转换为机械运动。
电机可以是直流电机、交流电机或其他类型的电机。
超声波电机的等效电路模型基于以上几个部分,可以建立超声波电机的等效电路模型。
其主要包括以下几个元件:1. 电源模型超声波电机所采用的电源可以用电源模型来描述。
对于直流电源,可以将其视为恒定电压源;对于交流电源,可以视为交流电压源。
电源模型可以用符号表示,如下所示:------|+|------V | ||-|其中,V表示电源的电压。
2. 振荡器模型超声波电机的振荡器可以用振荡器模型来描述。
振荡器模型包括一个表示振荡频率的元件,并与电源模型相连。
振荡器模型可以用符号表示,如下所示:--------|+|-----------------|+|--------| | | ||-| f |-|| |--------- ----------其中,f表示振荡频率。
3. 电磁感应装置模型超声波电机的电磁感应装置可以用电感和电阻模型来描述。
电感模型表示电磁感应装置的电感特性,电阻模型表示电磁感应装置的电阻特性。
超声波电机驱动控制器毕业设计
超声波电机驱动控制器毕业设计1 绪论 (1)1.1 超声波电机概述 (1)1.2 超声波电机驱动技术现状 (2)1.2.1 超声波电机控制方法 (2)1.2.2 驱动技术的发展 (2)1.3 驱动电路的设计要求 (5)2 驱动控制器总体方案设计 (5)2.1 系统总体方案简介 (5)2.2 DDS 技术工作原理及方案选择 (7)2.2.1 DDS 技术概述 (7)2.2.2 DDS 工作原理 (8)2.2.3 DDS器件的选择 (9)2.3 滤波电路方案选择 (11)2.3.1 滤波器的原理与分类 (12)2.3.2 滤波器件选择 (13)2.4 放大电路方案选择 (15)2.4.1 放大电路要求及电路初步设计 (15)2.4.2 高压集成运算放大器的选定 (16)2.4.3 前置放大器型号选择 (17)3 硬件电路设计与实现 (17)3.1 DDS 波形产生电路设计 (17)3.1.1 AT89LS52 外围电路设计 (17)3.1.2 AD9854 外围电路设计 (20)3.2 带通滤波电路设计 (24)3.3 功率放大电路设计 (27)3.4 系统电源电路设计 (29)4 软件设计与系统调试 (32)4.1 系统软件基本结构 (32)4.2 波形产生软件设计 (33)4.2.1 AD9854 的工作模式 (33)4.2.2 AD9854 的使用 (36)致谢............................................ 错误!未定义书签。
参考文献 (1)1 绪论1.1 超声波电机概述超声波电机(Ultrasonic Motor,简称 USM)的基本结构及工作原理完全不同于传统的电磁电机,它不是以电磁作用传递能量,而是利用压电陶瓷的逆压电效应激发超声振动(频率≥20kHz),然后通过定、转子之间的接触和摩擦力将交变的振动转化成旋转运动或直线运动,实现从电能到机械能的能量转换[1]。
超声波电动机.pptx

yA yB
sin cos
2π
2π
x x
sin 0t c os 0 t
(9-4)
-12-
第13页/共39页
第九章 超声波电动机
其合成为
y( x, t )
yA
yB
cos( 2π
x
0t)
(9-5)
这是一个频率为ω0、波幅为ζ、波长为λ的行波。
-13-
第14页/共39页
第九章 超声波电动机
在环形行波型超声波电动机中,定子上的压电陶瓷环 是行波形成的核心,它的电极配置如图9-6所示。
可见,在行波传播速度v为恒值的情况下, 改变激振 电压的频率f0可以快速改变转速,但存在一定的非线性。 而改变激振电压的大小,即改变行波的振幅ζ,也可以
改变转速。如果忽略压电体逆压电效应的非线性,则转 速可以随激振电压作线性变化,这是超声波电动机变压 调速的特点。
-21-
第22页/共39页
第九章 超声波电动机
h y(x,t) 2 x
πh
sin( 2π
x 0t)
(9-7)
-16-
第17页/共39页
第九章 超声波电动机 由以上两式,得
ux2 (x,t) uy2 (x,t) 1
(πh / )2 2
(9-8)
由此可见,弹性体表面上任意一点的运动轨迹为椭圆 形,这种椭圆运动使得弹性体表面质点对转子产生连续 的定向拨动作用, 且转子的运动方向与行波方向相反, 如图9-7所示。 显然,如果改变激振电源的电压极性, 便可以改变转子的运动方向。
vr
vxmax
πh0
(9-10)
-19-
负号表示转子的运动方向与行波方向相反
超声波电动机

微特电机课程论文超声波电动机学院:专业班级:学号:姓名:指导教师:日期:摘要超声波电机是一个机电耦合系统,涉及到振动学、摩擦学、材料学、电力电子技术、自动控制技术和实验技术等。
超声波电动机利用压电材料的逆压电特性,激发电机定子的机械振动,通过定转子之间的摩擦力,将电能转换为机械能输出,驱动转子的定向运动。
与传统电机相比,它具有体积小、低速大转矩、反应速度快、不受磁场影响、保持力矩大等优点,是一项跨学科的高新技术。
近几年来超声波电动机已成为国内外在微型电机方面的研究热点。
关键字:超声波电机、逆压电效应、机械振动、高新技术。
一、超声波电动机简介超声波电动机(Ultrasonic Motor缩写USM)是以超声频域的机械振动为驱动源的驱动器。
由于激振元件为压电陶瓷,所以也称为压电马达。
80年代中期发展起来的超声波电机(Ultrasonic motor,USM)是基于功能陶瓷的超声波频率的振动实现驱动的新型驱动器。
超声电机是一个典型的机电一体化产品,由电机本体和控制驱动电路两部分组成。
产品涉及到振动学、波动学、材料学、摩擦学、电子科学、计算技术和实验技术等多个领域。
超声波电动机打破了由电磁效应获得转速和转矩的传统电机的概念,它利用压电材料的逆压电效应,使振动体在超声频段内产生振动,通过定子与动子间的摩擦输出能量。
二、超声波电动机的分类1. 环状或盘式行波型超声波电动机由底部粘接着压电陶瓷元件的环状定子和环状转子构成。
对极化后的压电陶瓷元件施加—定的高频交变电压,在定子弹性体中形成沿圆周方向的弯曲行波。
对定、转子施加一定的预压力,转子受到与行波传播方向相反的摩擦力作用而连续转动,定子上的齿槽用于改善电机的工作性能。
2. 直线式行波型超声波电动机(1)双Langevin振子型:利用两个Langevin压电换能器,分别作为激振器和吸振器,当吸振器能很好地吸收激振器端传来的振动波时,有限长直梁似乎变成了—根半无限长梁,这时,在直梁中形成单向行波,驱动滑块作直线运动。
超声波电机的原理与应用
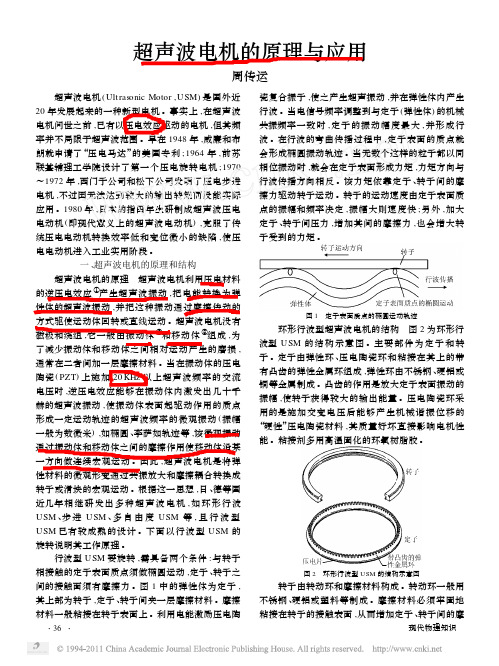
超声波电机的原理与应用周传运 超声波电机(Ultrasonic Motor ,USM )是国外近20年发展起来的一种新型电机。
事实上,在超声波电机问世之前,已有以压电效应驱动的电机,但其频率并不局限于超声波范围。
早在1948年,威廉和布朗就申请了“压电马达”的美国专利;1964年,前苏联基辅理工学院设计了第一个压电旋转电机;1970~1972年,西门子公司和松下公司发明了压电步进电机,不过因无法达到较大的输出转矩而没能实际应用。
1980年,日本的指田年生研制成超声波压电电动机(即现代意义上的超声波电动机),克服了传统压电电动机转换效率低和变位微小的缺陷,使压电电动机进入工业实用阶段。
一、超声波电机的原理和结构超声波电机的原理 超声波电机利用压电材料的逆压电效应①产生超声波振动,把电能转换为弹性体的超声波振动,并把这种振动通过摩擦传动的方式驱使运动体回转或直线运动。
磁极和绕组,它一般由振动体②和移动体③组成,为了减少振动体和移动体之间相对运动产生的磨损,通常在二者间加一层摩擦材料。
当在振动体的压电陶瓷(PZT )上施加20KHz 以上超声波频率的交流电压时,赫的超声波振动,使振动体表面起驱动作用的质点形成一定运动轨迹的超声波频率的微观振动(振幅一般为数微米),如椭圆、李萨如轨迹等,该微观振动通过振动体和移动体之间的摩擦作用使移动体沿某一方向做连续宏观运动。
因此,超声波电机是将弹性材料的微观形变通过共振放大和摩擦耦合转换成转子或滑块的宏观运动。
根据这一思想,日、德等国近几年相继研发出多种超声波电机,如环形行波USM 、步进USM 、多自由度USM 等,且行波型USM 已有较成熟的设计。
下面以行波型USM 的旋转说明其工作原理。
行波型USM 要旋转,需具备两个条件:与转子相接触的定子表面质点须做椭圆运动,定子、转子之间的接触面须有摩擦力。
图1中的弹性体为定子,其上部为转子,定子、转子间夹一层摩擦材料。
超声波马达原理
h 2
h 2
h 2π 所以 : ε x = x − ω0 t −πε 0 cos λ λ
εy εx 1 + = ε 0 πε 0 h λ
2 2
弹性体表面上任意一点 P 按照椭圆轨迹运动,这种运动使弹性体表面质 点对移动体产生一种驱动力,且移动体的运动方向与行波方向相反。
2 uy
ξ
2 y
= sin 2 φ
当 ϕ =nπ (n=0, ±1, ±2, …)时,两个位移为同相运动,合成轨迹为一条直线;当
ϕ ≠ nπ 时,其轨迹为一椭圆,其中 ϕ =nπ ±
π
2
时为一规则椭圆 :
三、 行波电机结构与工作原理 1、结构 常见的行波电机的结构分为:上端盖、轴承、弹簧、转子、定子和下端盖。 定子上面有很多齿状结构,齿状结构下面连接的是压电振子。转子和定子的齿状 物之间是一层特殊的摩擦材料,起增大摩擦因数作用。
根据激励两个驻波振动的方式不同,驻波超声波电动机分为:
纵扭振动复合型:采用两个独立的压电振子分别激发互相垂直的两个驻 波振动,合成弹性体表面质点的椭圆振动轨迹。 模态转换型:模态转换型仅有一个压电振子激发某一方向的振动,再通 过一个机械转换振子同时诱发与其垂直的振动,二者合成弹性体表面质点的 椭圆振动轨迹,驱动移动体运动。 3. 椭圆运动及其作用
λ
yB = ε 0 cos
2π
λ
λ
x cos ω0t
在弹性体中,这两个驻波的合成为一行波:
2π y = y A + yB = ε 0 cos x − ω0 t λ
3) 在 USM 中形成行波 USM 的定子由环形弹性体和环形压电陶瓷构 成,压电陶瓷按图示的规律极化,即可产生两个在时间和空间上都相差 90° 的驻波。 极化规律:将一片压电陶瓷环极化为 A、B 两相区,两相区之间有 λ/4 的区域未极化,用作控制电源反馈信号的传感器,另有 3/4 波长的区域作为 两相区的公共区。极化时,每隔 1/2 波长反向极化,极化方向为厚度方向。 图中“+”“−”代表压电片的极化方向相反,两组压电片空间相差 λ/4,相
超声波电动机
人耳能感知的声音频率,约为50Hz ~20kHz之范围,因此超声波为20kHz 以上频率之音波或机械振动。超声波电 动机与传统的电磁式电动机不同,它是 利用压电陶瓷的逆压电效应,将超声振 动作为动力源的一种新型电动机,其外 形如图所示。
利用电压源驱动,发生向右方向传播的进行波 (顺转)。 B相利用电压 源进行波方向为向左传播的进行波(逆转)。下图为单压电芯片型超声波 电动机等效电路图。
二、超声波电动机的特点及应用
1. 超声波电动机的特点
(1)低速大转矩、效率高。 (2)控制性能好、反应速度快。 (3)形式灵活,设计自由度大。 (4)不会产生电磁干扰。 (5)结构简单。 (6)震动小、噪音低。
2. 超声波电动机工作原理 超声波电动机的工作是在极化的压电晶体上施加超声波频率的交
流电,压电晶体随着高频电压的幅值变化而膨胀或收缩,从而在定子 弹性体内激发出超声波振动,这种振动传递给与定子紧密接触的摩擦 材料以驱动转子旋转。
2. 超声波电动机工作原理 当使用振动材质为压电陶瓷,两个电压源以适当的间隔配置。A相
一、超声波电动机的结构和工作原理
1.超声波电动机的结构 超声波电动机一般由定子(振动部分)和
转子(移动部分)两部分组成,如图所示。该 电动机中既没有线圈也没有永磁体,其定子是 由压电晶体、弹性体(或热运动器件)、电极构 成的;转子为一个金属板,转子均带有压紧用 部件,加压于压电晶体上,定子和转子在压力 作用下紧密接触。为了减少定子、转子之间相 对运动产生的磨损,通常在两者之间(在转子 上)加一层摩擦材料。
2. 超声波电动机的应用
由于超声波电动机具有电磁电动机所不具备的许多特点,尽管 它的发明与发展仅有二十多年的历史,但超声波电动机已在照相机 的自动变焦镜头、微型飞行器、电子束发生器、智能机器人、焊接 机、轿车电气控制设备、航空航天工程、医疗理分析 2. 超声波电动机的特点和应用
超声波电机的研究1
负载
项目实施方案、预期目标及经费预算
超声波电机的发展背景
20世纪 年代 世纪60年代 世纪 年代——超声电机的提出阶段 超声电机的提出阶段 苏联 1964年,在基辅学院有学者提出超声电机的理论模型,自此超声 电机的研究工作宣告开始。
60年代末 年代末~70年代末 年代末——超声电机的初级发展阶段 年代末 年代末 超声电机的初级发展阶段
优良的控制性能
电机运动部件(转子)惯性小,响应快(毫秒级)控制性能良好。
250 位 200 移 150 100
电 动 电 动
电 动
动 动
电 性的
/mm
50 0 0 0.01 0.02 0.03 0.04 0.05 响应 /s
LOGO
超声波电机的研究与设计
——秦波,王一,吴茂昌
申请理由
秦波, 获三等奖学金两次,参加过基础学院组织的CAD建模培训,参 加学院组织的新思路科技创新比赛之旋转小车并获一等奖,步行机器 人培训及丛德宏老师指导的机器人竞赛选修课,参加了机械创新大赛。
王一,二等奖学金三次,沈阳机床奖学金一次。参加过基础学院CAD 建模培训及比赛,计算机竞赛(三等奖),新思路科技创新比赛之旋 转小车并获一等奖,也参加过机器人培训及丛德宏老师指导的机器人 竞赛选修课。精通AutoCAD,擅长编程,了解Solidworks,Matlab及 anysis有限元分析。
驱动超声波电机需要对定子上的压电陶瓷 元件施加一定功率的电信号,驱动器的优劣 关系到超声波电机的输出性能和应用
第三阶段
超声波电机驱动方式的设计
采用有限元法对定子与转子动力特性进行 分析,建立定子的机电耦合模型,借此再结合 Matlab进行结构的优化设计
第09章讲义超声波电动机
第九章 超声波电动机
环形行波型超声波电动机的基本结构如图9-1所示, 主要包括定子、转子、压力弹簧和转轴等部件。
] ]
转子
转动环
摩擦材料
定子
弹性体
压电陶瓷
压力弹簧
机壳
转轴
轴承
E1 E2
定子
转子
(a)
(b)
图9-1 环形行波型超声波电动机的基本结构
(a) 剖面图 (b) 立体图(局部)
-5-
第九章 超声波电动机
超声波电动机就是利用逆压电效应进行工作的,图92进一步说明了逆压电效应的作用。 当外电场的交变频 率与压电体的机械谐振频率一致时,压电体就进入机械 谐振状态,成为压电振子。 当振动频率在20kHz以上时, 就属于超声振动。
图9-2 逆压电效应示意图
-8-
第九章 超声波电动机
二、椭圆运动及其作用 超声振动是超声波电动
-3-
第九章 超声波电动机
第一节 超声波电动机的基本结构
超声波电动机的分类还没有统一的标准,按照驱动转 子运动的机理可分为驻波型和行波型两种。驻波型是利 用与压电材料相连的弹性体内激发的驻波来推动转子运 动,属间断驱动方式;行波型则是在弹性体内产生单向 的行波,利用行波表面质点的振动轨迹来传递能量,属 连续驱动方式。目前,环形行波型超声波电动机的基础 理论和应用技术均较为成熟。
图9-5 驻波形成示意图
x
-14-
第九章 超声波电动机 其数学表达式为
ysin2πxsin0t
(9-3)
设在弹性体上同时存在两相驻波A和B,它们的频率
同为ω0,波幅同为ζ,波长同为λ,并且在时间和空间上
均相差π/2,即
yA yB
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2016年第44卷第3期D设计分析esign and analysis 王光庆等 能量回馈型超声波电动机的结构设计与特性分析7 收稿日期:2015-09-10基金项目:国家自然科学基金项目(51277165);浙江省自然科学基金项目(LY15F10001);浙江省教育厅项目(Y201223050);浙江工商大学青年人才计划项目能量回馈型超声波电动机的结构设计与特性分析王光庆,高帅帅,李萧均,杨斌强(浙江工商大学,杭州310018)摘 要:为解决极端封闭环境中微机器人检测精密驱动及其电子设备自供电问题,提出了一种具有振动能量采集功能的超声波电动机㊂电机定子由两组压电陶瓷和金属基体构成锥面夹心结构,一组压电陶瓷利用逆压电效应将电能转换成机械振动能,实现电机的精密驱动与定位;另一组压电陶瓷利用正压电效应将定子机械振动能采集转换成电能,实现对电子器件自供电㊂对电机定子结构和压电陶瓷极化分区模式进行了设计,利用有限元分析软件建立了电机定子结构有限元机电耦合模型,仿真分析了电机振动模态㊁谐响应㊁输入导纳特性㊁能量采集转换特性和阻抗匹配特性等㊂研究结果为实现基于压电转换的驱动和能量采集一体化机电产品提供理论基础㊂关键词:振动能量采集;超声波电动机;有限元;结构设计与分析中图分类号:TM359.9 文献标志码:A 文章编号:1004-7018(2016)03-0007-04Design and Performances of an Energy-Feedback Type Ultrasonic MotorWANG Guang⁃qing ,GAO Shuai⁃shuai ,LI Xiao⁃jun ,YANG Bin⁃qiang(Zhejiang Gongshang University,Hangzhou 310018,China)Abstract :To solve the precision actuate and self-power problems of the micro-robotics operating in an extreme envi⁃ronment,a novel ultrasonic motor with vibration energy harvesting function was proposed.The motor stator consisting of two groups of piezoelectric elements and a metal body is a conical sandwich structure.One piezoelectric element was used to convert the electric energy into mechanical vibration energy with the converse piezoelectric effect,the other piezoelectric el⁃ement was used to harvest the stator vibration energy and convert it into electric energy with the piezoelectric effect.The structure of the motor and the polarization pattern of the piezoelectric elements were studied,and the electromechanical model of the ultrasonic motor stator was established with the finite element method.The vibration mode,resonant respon⁃ding,input impedance and the energy harvesting performance were numerically studied.The results provide the theoreticalguidance to develop the mechatronics device based on the piezoelectric principle.Key words :vibration energy harvesting;ultrasonic motor;finite element method;structure design and analysis0引 言如何对工作在极端恶劣环境(如密封㊁有毒㊁高低温等)中的设备进行检测与控制是近年来困扰工业界的一个重要难题㊂微型机器人由于不需要人类的干预与操控等优势成为解决该问题的首选,并广泛应用于上述极端恶劣环境中[1-2]㊂然而,当前大部分工作在极端恶劣环境中的微型机器人的能源动力均为有限能源,这严重影响了微型机器人的工作寿命,一旦有限能源耗尽,机器人将无法继续工作㊂因此,向极端环境中工作的微型机器人提供可持续的能源是机器人技术领域迫切需要解决的关键问题之一㊂另外,目前机器人关节机构大都采用电磁电机辅助减速机构的驱动控制方式,这种驱动方式增加了系统的复杂性与控制成本㊂超声波电动机(以下简称USM)是一种新型原理与结构的微型特种电机㊂它是利用压电材料的逆压电效应将电能转换成弹性体的机械振动能,并通过摩擦接触传递运动与力矩㊂它打破了迄今为止由电磁效应获得转速和转矩的电机的概念,是当今世界高新技术之一[3-4]㊂超声波电动机具有结构简单㊁低速大力矩㊁快速响应㊁自锁力大㊁无电磁干扰等优点,可以直接驱动机器人关节机构[5]㊂然而,超声波电动机的运行机理决定了其整体运行效率低,这对有限能源场合工作的机器人来说无疑是个软肋㊂因此,如何将超声波电动机的运行过程中的振动能量回收转换成有用的能源,实现为密封㊁恶劣等极端环境中工作的机器人供电,是一项非常有现实意义的研究工作㊂本文提出一种能量回馈型超声波电动机,研究这种超声波电动机的结构设计和振动特性与能量转换特性,为研制出更具有实用价值㊁集驱动与发电功D设计分析esign and analysis 2016年第44卷第3期 王光庆等 能量回馈型超声波电动机的结构设计与特性分析8 能一体化的新型超声波电动机打下基础,实现对微型机器人的精密驱动和供电一体化,为微型机器人在极端环境中的广泛应用提供能源和动力保障㊂1电机总体结构设计考虑到超声波电动机是振动电机,为了能更好地将电机运行过程中的振动能量采集回收,借鉴主流结构环形行波型超声波电动机本体结构,设计的能量回馈型超声波电动机结构如图1所示㊂能量回馈型超声波电动机主要包括锥面转子和压电定子两大部分,锥面转子通过紧固螺钉固定在输出轴上,并通过端盖㊁推力轴承的作用力,使之与压电定子的锥面接触㊂图1 能量回馈型超声波电动机结构 压电定子结构如图2所示,它通过其基座上的四个螺钉孔安装固定在底座上㊂压电定子由激振压电陶瓷环㊁能量采集压电陶瓷环和带锥面齿的金属弹性体通过高强度粘结胶高温固化构成,其中能量采集器压电陶瓷环位于压电定子顶部㊁金属弹性体位于压电定子中间㊁激振压电陶瓷环位于压电振子的底部,三者构成夹心式结构㊂金属弹性体内侧为锥面,与转子锥面配合后形成摩擦驱动接触面㊂图2 压电定子结构示意图 电机压电陶瓷环的极化分区模式如图3所示㊂激励压电陶瓷环采用主流环形行波型超声波电动机压电陶瓷极化分区模式[6],如图3(a)所示,整个激励压电陶瓷被极化分成两个左㊁右区16个扇区,当(a)激励压电陶瓷(b)能量采集压电陶瓷图3 压电陶瓷极化分区模式压电陶瓷被激励时在定子内部产生9个行波㊂能量采集器压电陶瓷环的极化分区模式如图3(b)所示,整个压电陶瓷环极化分区成18个扇区,相邻两扇区的极化方向相反㊂18个扇区可以同时采集定子运行过程中产生的振动能量,将其转换成电能输出㊂2定子锥面结构设计主流结构环形行波型超声波电动机定㊁转子摩擦接触面是平面接触,这种接触形式忽略了定子齿顶表面质点径向振动位移的影响㊂研究证明,径向振动位移与轴向振动位移的幅值一般是一个数量级,会造成较大的径向振动摩擦损耗,不利于提高电机的能量转换效率㊂因此,能量回馈型超声波电动机采用锥面结构实现定转子间的摩擦驱动[7],主要是为了充分利用定子齿面质点的径向和轴向振动的合力,使之与接触面垂直,增大接触面的机械振动幅值,减少接触面径向振动的摩擦顺好㊂因此,锥面结构的设计对定转子摩擦接触转换起到至关重要的作用㊂图4是锥面结构受力分析图(只画出转子部分),图中黑粗实线代表锥面定转子摩擦接触结构,F c 表示接触区域内转子受到的预压力,F r 表示其他接触区域对该接触区域施加的作用合力,N 为该接触区域定子对转子的支承力,f s 为该接触区域内转子受到的静摩擦力,θw 为锥面结构锥角㊂图4 锥面转子结构受力图假设转子稳定运行时,且定子锥面质点振动方向与转子锥面完全垂直,此时定转子接触面之间不存在径向滑动,由此可以建立转子轴向振动的力平衡方程:N cos θw +f s sin θw =F c (1)将f s =Nμs (μs 为接触面静摩擦系数)代入上式得到:N (cos θw +μs sin θw )=F c(2) 由上式可知,当θw =0时,式(2)变成:N =F c(3)此时,定转子接触面变为平面接触形式㊂当θw <π/2时,式(2)变成:N =F ccos θw +μs sin θw (4)此时只要满足θw >π-2arccos(μs /1+μ2s )就有:N >F c (5) 由式(3)和式(5)可知,要在定转子接触面产生 2016年第44卷第3期 D设计分析esign and analysis 王光庆等 能量回馈型超声波电动机的结构设计与特性分析9 相同的支撑力,锥面接触结构所需的预压力要比平面接触结构小㊂本文电机定转子锥面静摩擦系数为0.2,则可计算得到锥面结构的锥角θw 取值范围为[22.5°,90°]㊂3定子特性分析3.1模态分析根据图2和图4所设计的能量回馈型超声波电动机定子结构,采用有限元方法对其特性进行分析,其中定子弹性体材料为黄铜,压电陶瓷选用无锡海鹰公司生产的PZT-5A,极化方向沿z 轴,锥角θw 为45°,定子材料和结构参数如表1和表2所示㊂表1 材料参数参数黄铜压电陶瓷(PZT)密度ρ/(kg㊃m -3)89007500弹性模量E /GPa85-泊松比0.30.32 表2 定子结构尺寸 mm参数金属基体激励PZT 采集PZT 支撑基座内径22.522.52520.513外径30303022.520.5厚度0.290.80.80.52.5 利用有限元分析软件ANSYS10建立电机定子有限元模型[8-9],压电陶瓷采用8节点六面体耦合场SOLID5作为单元类型,金属基板采用8节点线性结构SOLID45作为单元类型㊂由于压电陶瓷和金属基体之间的粘结层以及PZT 表面电极的厚度很小,仅有几十微米到几百微米之间,在ANSYS 中属于薄膜结构,使用SHELL63单元作为单元类型㊂电机定子有限元模型如图5所示㊂在该模型中对金属基体㊁PZT 等设置单元属性和材料特性,然后,采用 vsweep”命令对定子实体模型进行扫略网格划分㊂最后,通过 d”命令对基座内径环面进行所有自由度的约束以及对PZT 进行节点电压自由度耦合后,计算可以得到电机定子的B 0,9模态及其振动频率,结果如图6所示,该模态的振动频率为54.0kHz㊂图5 电机定子有限元模型图6 电机定子振动模态3.2输出特性分析给定子激励压电陶瓷分别施加两个相位差为90°的正弦电压激励信号,如下:V 1=A m sin(2πft )V 2=A m sin(2πft +π2})(1)式中:A m 为电压幅值;f 为激励频率㊂对定子进行扫频分析,扫描频率范围为[50,60]kHz,定子结构阻尼系数为0.05,提取定子表面节点振动位移响应,其中定子表面节点分布如图7所示,1,2,3和4分别表示采集压电陶瓷表面节点,5和6表示定子锥面顶点和低点处节点㊂计算得到上述节点的轴向振动位移和相位响应结果如图8和9所示㊂由图8和图9可以看出,定子表面振动位移在54kHz 达到最大,这与模态计算分析结果是一致的,采集压电陶瓷表面节点振动位移幅值最大达到1.77μm,且定子锥面顶部和底部节点振动位移幅值基本保持一致,这有利于提高电机运转的平稳性㊂图7 定子表面节点分布情况图8 定子节点振动位移响应图9 定子节点振动位移相位响应图10是采集压电片输出电压幅值和相位相应的结果㊂可以看出,定子在谐振频率54kHz 处工作图10 采集压电片输出电压幅值和相位响应曲线时,采集压电片的输出电压达到最大180V,且相位在此频率处发生改变,由0°改变成-180°㊂由此可以计算得到采集压电片输出电流和平均输出功率分别:i (f )=2πfC p V (f )(6)P (f )=V (f )㊃i (f )/2=πfC p V 2(f )(7)式中:f 为激励频率;C p =εr A /h p 为采集压电片电容;D设计分析esign and analysis 2016年第44卷第3期 王光庆等 能量回馈型超声波电动机的结构设计与特性分析10 εr ,A 和h p 分别为采集压电片的介电常数㊁面积和厚度㊂计算结果如图11所示㊂图11 采集压电片输出电流和功率3.3输入导纳特性分析图12是定子激励压电片输入电流和相位响应曲线㊂可以看出,对于图3(a)的激励压电片极化分图12 定子输入电流幅值和相位响应区模式,每片激励压电陶瓷的输入电流最大值为0.11A㊂根据图12计算得到的输入电流,利用下式可以得到定子激励压电陶瓷的输入导纳特性曲线㊂Y (ω)=I (ω)V (ω)(8)G (ω)=Re[Y (ω)](9)B (ω)=Im[Y (ω)](10)式中:Y ,I 和V 分别为定子输入导纳㊁电流和电压;G 和B 分别为电导和电纳;ω为激励信号角频率㊂图13和图14分别是计算得到的定子输入导纳特性曲线和导纳圆㊂由图13和图14可以得到定子最小导纳频率f m ㊁最大导纳频率f n ㊁串联谐振频率f s ㊁并联谐振频率f p ㊁谐振频率f r 等参数㊂利用这些已知参数对定子等效电路模型参数进行识别,结果如表3所示㊂图13 定子输入导纳特性图14 定子输入导纳圆表3 定子等效电路参数识别结果R m /kΩL m /H C m /nF Q m1.160.191.828.8033.4能量采集区阻抗匹配特性分析为了将采集输出的电能对负载有效供电,需要对负载阻抗与采集压电陶瓷的阻抗进行匹配处理㊂采集压电陶瓷用一个恒流源I 与夹持电容C p 并联连接表示,如图15所示[10],Z 为外部阻抗,V 为采集输出电压,I Z 为流经阻抗的电流,则外部阻抗的功率:P Z =12ZI 2Z =12Z(Z cp I Z +Z cp)2(11)式中:Z cp =1j ωC p㊂图15 压电陶瓷等效电路图图16是负载阻抗匹配结果㊂可以看出,当负载阻抗为9kΩ时,其输出功率达到最大0.7W,此时负载输出功率接近采集压电陶瓷输出功率的50%㊂图16 采集区阻抗匹配4结 论本文提出了一种具有振动能量采集功能的超声波电动机,对其结构和特性进行了设计与分析,得到如下结论:(1)要在定转子接触面产生相同的支撑力,锥面接触结构所需的预压力要比平面接触结构小;(2)锥面接触结构有利于电机运行稳定性,降低定子径向振动损耗;(3)电机谐振频率为54kHz,电机振动位移幅值㊁采集输出电压㊁电流和输出功率在谐振时达到最大;(4)当负载阻抗与采集压电陶瓷阻抗匹配时,负载输出功率达到最大,且为采集压电陶瓷输出功率的50%㊂研究结果为能量回馈型超声波电动机样机制作和实验研究提供了理论基础㊂(下转第24页) D设计分析esign and analysis 2016年第44卷第3期 李卫民等 新型爪极发电机的电磁分析 24 软件后处理器得空载有无磁条的气隙线路径上磁密变化曲线对比图,如图8所示㊂(a)无磁条(b)加磁条后图8 气隙线路径上磁密变化图 除上述结果外,还得出了空载时,有无长条永磁体气隙磁通量对比曲线图,如图9所示㊂从图9中可以明显地看出,利用永磁体使得磁通量得到明显的提高,漏磁通从23.7%减小到8%㊂图9 磁通量对比曲线3结 语本文通过逆向工程获得了爪极发电机的三维模型,利用Ansoft软件中的Maxwell3D模块对该款发电机进行了空载励磁分析,从理论和分析结果两方面论证了在发电机前后爪极之间镶嵌永磁体可以大大增加爪极的导磁性能,达到提高发电机的输出功率和效率的目的㊂并为后续的负载分析以及结构优化奠定了基础㊂参考文献[1] 李方正,赖建军,程延伟,等.基于Ansofl的爪极发电机空载漏磁分析[J].微电机,2012,45(2):14-16.[2] 刘金鹏,庄圣贤,杨建华,等.基于Maxwell3D的爪极式发电机的建模与仿真分析[J].电机技术,2013,(3):8-11. [3] 匡秀洪,庄圣贤,匡秀鹏,等.爪极发电机的气隙磁场与结构的优化[J].微特电机,2012,40(11):30-33.[4] 赵博,张洪亮.ANSOFT12在工程电磁场中的应用[M].北京:中国水利水电出版社,2010.[5] 倪有源,王群京,张学.爪极发电机空载漏磁计算[J].中国电机工程学报,2008,28(17):132-137.[6] ZHANG Fengge,YUE Zhang,BAI Haijun,et al.Study on a newtype of permanent magnet claw pole motor with outer rotor[C]//IEEE POWERCON,2008:1-5.[7] 乔东伟,王秀和,朱常青.环形永磁体夹置式混合励磁无刷爪极发电机的研究[J].电机与控制学报,2014,18(5):30-35. [8] 张志华.车辆用交流发电机发电性能仿真分析计算方法[J].电机与控制应用,2013,40(10):50-57.作者简介:李卫民(1965-),男,博士,教授,研究方向为机械CAD/CAE/CAM/ERP㊁数字化设计与制造技术㊂(上接第10页)参考文献[1] 张鹏飞,闫利慧,张珏.管道机器人驱动与控制检测系统设计[J].科技创新导报,2010,(26):15-16.[2] 穆晓风,顾大强,陈柏,等.血管微型机器人无损伤体内驱动方法[J].浙江大学学报:工学版,2005,39(5):618-622. [3] 赵淳生.面向21世纪的超声电机技术[J].中国工程科学,2002,4(2):86-91.[4] ZHAO Chunsheng.Development and application of ultrasonic mo⁃tors in ihina[C]//2nd International Workshop on Piezoelectric Material and Applications in Actuators(IWPMA),University of Paderborn,Germany,2005:130-138.[5] SUN Z J,SHUAI S H,HUANG W Q.Control of robot driver bymultiple ultrasonic motors based on robust parameter design[J].Transactions of Nanjing University of Aeronautics&Astronautics, 2009,26(4):243-250.[6] 王光庆,沈润杰,郭吉丰.压电陶瓷对超声波电动机定子特性的影响[J].机械工程学报,2010,46(4):8-14.[7] 张东华,陈在礼,陈维山,等.新型锥面驱动超声电机的实验研究[J].哈尔滨商业大学学报:自然科学版,2006,22(2):58-60.[8] MOHD ROMLAY F R,WAN YUSOLL W A,MAT PAIH K A.In⁃creasing the efficiency of traveling wave ultrasonic motor by modif⁃ying the stator geometry[J].Ultrasonics,2016,64:177-185.[9] FLUECKIGER M,FERNANDEA J M,PERRIARD Y.Finite ele⁃ment method based design and optimisation methodology for piezo⁃electric ultrasonic motor[J].Mathematics and Computers in Sim⁃ulation,2010,81(2):446-459.[10] 王光庆,陆跃明,郭吉丰.超声波电动机定子振动能量回收转换特性[J].浙江大学学报:工学版,2013,47(1):174-181.作者简介:王光庆,男,博士,教授,研究方向为压电能量采集技术和超声波电机㊂。