超声波测距原理及调试程序
超声波测距的原理
超声波测距的原理超声波测距是一种智能测距技术,它利用声速的不同以及发射接收信号的时间差,来计算距离的测量技术。
1.原理超声波测距的原理是通过发射声波,测量声波传播的时间来计算距离。
根据声波在介质中的传播速度,计算出发射点至接收点的距离。
原理公式:距离=声速×时间即:Distance=Speed × Time其中,声速即声波在介质中的传播速度,其值为343m/s;时间即发射声波至接收声波的时间,单位为秒(s)。
2.测距方法(1)双抛物线法发射设备发出短促的超声波,声波以某一固定的速度传播,声波开始发射时,传播的距离为零,传播距离随着时间增长而增长,当该声波正好从目标点穿越而去时,应用接收设备接收该声波,利用计算机处理作出声波传播距离的图形,从双抛物线拟合计算出测量值。
(2)回波法发射设备发出一次超声波信号,当发射的超声波信号到达目标物时,目标物会把超声波信号接收并反射回来,接收设备接收反射的超声波信号,将发射信号及反射信号的时间差作为距离的测量参数进行计算,从而计算出距离的测量值。
回波计算距离的公式:Distance=Time×V/2其中,Time为声波发射到接收的时间差,V为声波在介质空气中的传播速度。
三、超声波测距应用超声波测距技术在智能汽车、工业控制与安全监控、建筑物安全管理等领域有着广泛的应用,其中包括以下几种:(1)智能汽车:超声波测距技术可以帮助智能汽车检测前方障碍物的距离,从而进行安全护栏的移动,同时也能帮助智能汽车检测行驶路线,以便安全驾驶。
(2)工业控制与安全监控:超声波测距技术可以帮助工业设备检测具体物体的距离,从而进行控制和安全监控,保障工业生产的安全运行。
(3)建筑物安全管理:超声波测距技术可以帮助建筑物检测具体的安全距离,从而保障建筑物的安全管理。
四、总结超声波测距是一项智能测距技术,原理是利用声波的传播速度及传播时间差,来计算出两点之间的距离。
超声波测距的原理

超声波测距的原理超声波测距是一种常用的距离测量方法,其原理是利用超声波在空气介质中的传播速度进行测量。
下面将详细介绍超声波测距的原理。
超声波是指频率大于20kHz的声波,其在空气中的传播速度约为343m/s。
超声波测距利用超声波的特性实现距离测量。
超声波测距一般由测距传感器和控制电路两部分组成。
首先,超声波测距传感器发射一段持续时间很短的超声波脉冲。
当超声波遇到物体时,部分声能会被物体反射回传感器。
接收到反射信号后,传感器会将其转换为电信号并送入控制电路。
控制电路通过计算从超声波发射到接收所经过的时间,即超声波的回传时间,来计算测量距离。
这里需要注意的是测距传感器发射的超声波是沿直线传播的,而物体可能位于传感器发射超声波的路径上的任意位置。
因此,控制电路需要考虑超声波的传播时间和传感器离物体的实际距离之间的关系。
控制电路会根据声波的回传时间来计算物体与传感器的距离。
具体计算公式是:距离= 回传时间x 速度其中,速度指的是超声波在空气中传播的速度。
由于声波在空气中的传播速度几乎是一个固定值,所以只要计算超声波回传时间,就可以准确地测量距离。
为了提高测量的精度,超声波测距通常会对回传时间进行多次测量,并取平均值以减小误差。
此外,还可以通过调整超声波发射的持续时间或频率,以及增加传感器的发射和接收角度,进一步提高测量精度。
超声波测距的原理基于声波在空气中的传播速度和超声波的回传时间的关系。
通过测量超声波的回传时间,可以计算出物体与测距传感器之间的距离。
这种测距方法具有测量范围广、精度高、稳定性好等优点,在工业、测量等领域有着广泛的应用。
超声波雷达的测距原理

超声波雷达的测距原理
超声波雷达的测距原理是基于声波在空气中传播的速度恒定不变的特性。
声波的传播速度与介质的性质有关,一般情况下声波在空气中的传播速度可以认为是恒定的。
因此可以通过测量超声波的传播时间来计算出物体与传感器之间的距离。
具体的测量过程如下:
1.发射器发出超声波信号:发射器产生超声波信号并将其发射到空气中。
超声波信号一般具有高频率和短脉冲宽度的特点。
2.超声波信号在空气中传播:超声波信号从发射器发出后,在空气中传播。
它以声速的速度在空气中传播,直到碰到一个物体。
3.超声波信号被物体反射:当超声波信号遇到物体时,将会被物体表面反射。
一部分信号会继续传播,另一部分信号会被物体吸收或散射。
4.接收器接收反射信号:接收器接收到反射回来的超声波信号。
接收器一般具有高灵敏度和宽带的特点。
5.处理器计算距离:处理器通过测量超声波信号的传播时间来计算物体与传感器之间的距离。
它根据超声波信号发射和接收的时间差来计算距离,根据速度等参数来进行计算。
需要注意的是,由于超声波在空气中传播速度恒定,所以测量结果会受到环境条件的影响,比如温度和空气湿度等因素。
同时,物体的形状、尺寸和表面特性也会对测量结果产生影响,因此在实际应用中需要进行一定的校正和补偿。
超声波测距原理
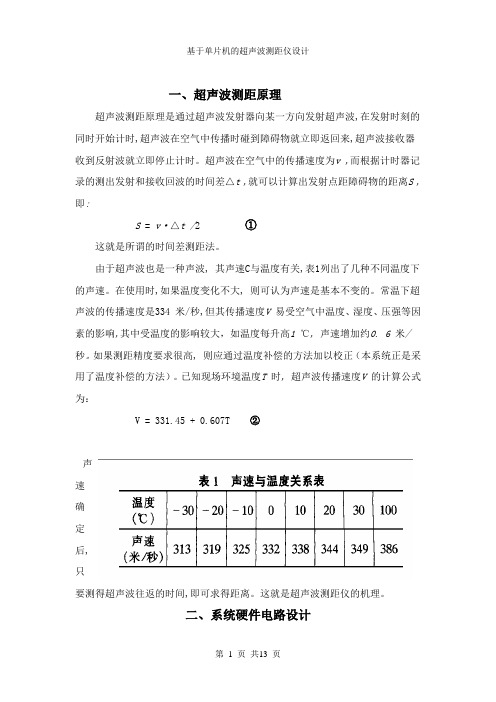
一、超声波测距原理超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为v ,而根据计时器记录的测出发射和接收回波的时间差△t ,就可以计算出发射点距障碍物的距离S ,即:S = v·△t /2 ①这就是所谓的时间差测距法。
由于超声波也是一种声波, 其声速C与温度有关,表1列出了几种不同温度下的声速。
在使用时,如果温度变化不大, 则可认为声速是基本不变的。
常温下超声波的传播速度是334 米/秒,但其传播速度V 易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 ℃, 声速增加约0. 6 米/ 秒。
如果测距精度要求很高, 则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。
已知现场环境温度T 时, 超声波传播速度V 的计算公式为:V = 331.45 + 0.607T ②声速确定后,只要测得超声波往返的时间,即可求得距离。
这就是超声波测距仪的机理。
二、系统硬件电路设计图2 超声波测距仪系统框图基于单片机的超声波测距仪框图如图2所示。
该系统由单片机定时器产生40KHZ的频率信号、超声波传感器、接收处理电路和显示电路等构成。
单片机是整个系统的核心部件,它协调和控制各部分电路的工作。
工作过程:开机,单片机复位,然后控制程序使单片机输出载波为40kHz的10个脉冲信号加到超声波传感器上,使超声波发射器发射超声波。
当第一个超声波脉冲群发射结束后,单片机片内计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数,这样就得到了从发射到接收的时间差△t;根据公式①、②计算出被测距离,由显示装置显示出来。
下面分别介绍各部分电路:1 、超声波发射电路超声波发射电路如图3所示,89C51通过外部引脚P1.0 输出脉冲宽度为250μs , 40kHz的10个脉冲串通过超声波驱动电路以推挽方式加到超声波传感器而发射出超声波。
超声波 测距 原理

超声波测距原理
超声波测距是一种利用超声波的特性来测量距离的技术。
其原理基于超声波在空气中传播的速度固定,并且当超声波遇到物体表面时会发生反射。
利用超声波发射器发出的超声波经过发射器和物体之间距离的时间差可以计算出物体与发射器之间的距离。
超声波测距装置主要由超声波传感器、脉冲发生器、计时器和显示器等组成。
首先,脉冲发生器会生成一个短脉冲信号,这个信号会被超声波传感器转化为超声波信号并发射出去。
当超声波遇到物体时,一部分被物体吸收,一部分被物体反射回来,被超声波传感器接收到。
超声波传感器会将接收到的超声波信号转化为电信号,并传送给计时器。
计时器记录下发射超声波和接收到反射超声波之间的时间差,然后根据超声波在空气中的传播速度来计算出物体与传感器之间的距离。
最后,测量结果会通过显示器显示出来。
超声波测距技术广泛应用于工业领域中,如测量物体的距离、液位、宽度等。
其优点包括测距精度高、测量范围广、无需直接接触被测物体等。
然而,超声波测距也存在一些局限性,比如受到物体表面形状和材料的影响,对于某些特殊材料的测量可能不太准确。
因此,在具体应用中需要根据实际情况选择合适的测距技术。
超声波测距仪的设计与调试-接收部分PPT培训课件

如何实现高精度的测距,以及在多障碍物环境下如何准确判断障碍物的 位置和距离。
实际应用案例二
案例名称
机器人避障系统
描述
在机器人避障系统中,通过安装超声波测距仪,机器人能够实时感 知周围环境,检测障碍物的距离,自动调整行进路线,实现自主避 障。
技术难点
如何处理复杂环境下的噪声干扰,以及如何提高测距的实时性和准确 性。
接收部分的软件设计
数据采集
编写软件程序,通过ADC (模数转换器)实时采集 接收到的超声波信号数据。
信号处理算法
根据实际情况,设计适当 的信号处理算法,如滤波、 去噪、特征提取等,以提 高测距精度。
数据输出
将处理后的数据输出到显 示界面或通过串口发送到 上位机进行进一步处理。
03 超声波测距仪接收部分调 试
实际应用案例三
案例名称
管道检测系统
描述
在管道检测系统中,通过将超声波测距仪搭载在管道检测 设备上,能够实时检测管道内部的状况,如管道的腐蚀程 度、堵塞情况等。
技术难点
如何克服管道内部的复杂环境,如液体、气体等对超声波 传播的影响,以及如何提高测距的精度和稳定性。
THANKS FOR WATCHING
此外,随着物联网和智能传感器技术的发展,超声波测距仪 在智能家居、智能安防等领域的应用也越来越广泛。
超声波测距仪的发展趋势
未来,随着材料科学、微电子技术和算法的进步,超声波测距仪将朝着 更小、更轻、更准确的方向发展。
新型材料和制造工艺的应用将有助于减小测距仪的体积和重量,提高其 便携性和灵活性。同时,随着算法的改进和数据处理能力的提升,超声
等措施。
测量误差大
总结词
测量误差大是超声波测距仪常见的问 题之一,表现为测量结果与实际距离 存在较大偏差。
超声波测距原理
超声波测距原理超声波测距是利用超声波在空气中传播的特性来测量距离的一种技术。
它通常被应用在工业自动化、智能车辆、无人机等领域,具有测距精度高、反射面要求低、不受光照影响等优点。
超声波测距的原理基于声波在空气中的传播速度恒定的特性,通过测量超声波的发射和接收时间来计算距离。
首先,超声波传感器会发射一束超声波脉冲,这个脉冲会在空气中以声速传播。
当这个脉冲遇到一个物体时,部分声波能量会被物体反射回传感器。
传感器会立即切换成接收模式,开始接收反射回来的超声波。
通过测量发射和接收超声波的时间差,可以计算出物体与传感器之间的距离。
超声波测距的原理可以用以下公式表示,距离 = 时间差×声速 / 2。
其中,时间差是发射和接收超声波的时间间隔,声速是超声波在空气中传播的速度。
由于超声波在空气中的传播速度大约为340m/s,因此可以通过测量时间差来计算出物体与传感器之间的距离。
超声波测距的精度受到多种因素的影响,其中包括超声波传感器的发射频率、接收灵敏度、环境温度、声波反射面的性质等。
发射频率越高,测距精度越高,但穿透能力越弱;而接收灵敏度则决定了传感器对反射回来的超声波的捕捉能力。
环境温度的变化会影响声速,从而影响测距的准确性。
此外,反射面的性质也会影响超声波的反射情况,不同的材质和形状都会对超声波的反射产生影响。
为了提高超声波测距的精度和稳定性,通常需要对传感器进行校准和滤波处理。
校准可以通过对传感器的发射频率和接收灵敏度进行调整,以及通过环境温度的补偿来提高测距的准确性。
滤波处理则可以通过滤除噪声信号和干扰信号,使测距结果更加稳定可靠。
总的来说,超声波测距原理是利用超声波在空气中传播的特性来测量距离的一种技术。
它通过测量超声波的发射和接收时间来计算物体与传感器之间的距离,具有测距精度高、反射面要求低、不受光照影响等优点。
在实际应用中,需要考虑多种因素对测距精度的影响,并进行相应的校准和滤波处理,以提高测距的准确性和稳定性。
超声波测距工作原理
超声波测距工作原理超声波测距技术是一种常见的非接触式测量方法,通过发送超声波信号并测量其传播时间来实现距离的测量。
它在许多领域中得到广泛应用,如测距、障碍物检测以及无人驾驶等。
本文将介绍超声波测距的基本工作原理以及常用的超声波传感器。
一、超声波测距的原理超声波是一种高频声波,它的频率通常在20kHz到200kHz之间。
超声波测距利用声音在空气中传播的速度恒定不变的特性进行测量。
其基本原理可以概括为以下几个步骤:1. 发送超声波信号:超声波传感器会通过压电陶瓷元件或电磁换能器等将电能转换为声能,并向外发射超声波信号。
2. 超声波的传播:超声波信号在空气中传播,并遇到目标物体时会发生反射。
3. 接收反射信号:传感器会同时兼具发送和接收功能,它会接收到目标物体反射回来的超声波信号。
4. 测量传播时间:测量信号从发送到接收的时间差,通过将声音速度与时间乘积,可以得到距离。
二、超声波传感器类型超声波测距通常使用的传感器有两种类型:时差法和多普勒效应法。
1. 时差法传感器:时差法传感器是通过测量超声波信号的传播时间来计算距离的。
它通常由超声波发射器和接收器组成。
当超声波信号被目标物体反射后,接收器接收到信号并发送给计时器,计时器会记录下信号的传播时间。
然后,通过将传播时间乘以超声波在空气中的速度,可以得到目标物体与传感器之间的距离。
2. 多普勒效应法传感器:多普勒效应法传感器则是通过检测超声波信号的频率变化来计算距离的。
当超声波信号遇到流体或运动目标物体时,会发生频率的变化。
传感器通过测量这种频率变化,可以计算出目标物体与传感器之间的速度和距离。
三、应用领域超声波测距技术广泛应用于许多领域,主要包括以下几个方面:1. 工业领域:超声波测距被广泛用于工业自动化领域中的距离测量、液位测量、流量测量等。
它可以实现非接触式测量,同时也能够适应不同环境的复杂条件。
2. 车辆领域:超声波测距被应用于车辆防撞系统中,常见的倒车雷达就是使用超声波测距原理实现的。
超声波雷达的测距原理
超声波雷达的测距原理超声波雷达是一种利用高频超声波进行测距的无线电波雷达。
它的原理是利用超声波在空气中的传播速度与距离的关系,通过发射和接收超声波信号来测量距离。
超声波的频率通常在20kHz到200kHz之间,这种频率的声波在空气中传播时,具有较强的穿透力和折射力。
因此,超声波雷达可以穿透一定的障碍物,如烟雾、雾气、沙尘等,进行远距离的测量。
超声波雷达的测距原理主要分为两种:时间测距和频率测距。
一、时间测距时间测距是利用超声波在发射和接收之间传播的时间来计算距离。
超声波发射器向目标发射超声波信号,当信号遇到目标时,会被反射回来,经过接收器接收。
接收器接收到信号后,会将信号转换为电信号,然后计算发射和接收之间的时间差,再根据声波在空气中的传播速度计算出距离。
时间测距的优点是精度高,可以达到毫米级别。
但是,它的缺点是受到环境影响较大,如温度、湿度等因素会影响声波在空气中的传播速度,从而影响测距精度。
二、频率测距频率测距是利用超声波的频率变化来计算距离。
当超声波发射器向目标发射超声波信号时,信号会被目标反射回来,经过接收器接收。
接收器接收到信号后,会将信号转换为电信号,并进行频率分析。
由于声波在空气中传播时会受到多次反射和折射,所以接收到的信号会受到多普勒效应的影响,导致频率发生变化。
根据多普勒效应的原理,可以计算出发射器和目标之间的相对速度,进而计算出距离。
频率测距的优点是受环境影响较小,可以适应多种环境条件。
但是,它的缺点是精度较低,一般只能达到厘米级别。
总的来说,超声波雷达的测距原理是利用超声波在空气中的传播速度与距离的关系,通过发射和接收超声波信号来测量距离。
时间测距和频率测距是两种常用的测距方法,它们各有优缺点,需要根据具体的应用场景选择合适的方法。
超声波测距仪原理
超声波测距仪原理
超声波测距仪是一种利用超声波的特性来测量距离的仪器。
它的测量原理基于声波在不同介质中传播速度不同的特点。
超声波是一种高频声波,其频率通常在20kHz到1GHz之间。
超声波测距仪通过发射超声波并接收其反射信号,来计算测量物体与测距仪之间的距离。
超声波测距仪由发射器和接收器两部分组成。
发射器发射出超声波脉冲,然后接收器接收到脉冲的反射信号。
测距仪通过计算脉冲信号的往返时间,并结合声波在空气中的传播速度,来确定物体与测距仪之间的距离。
具体测量过程如下:
1. 发射器发出一个超声波脉冲。
2. 超声波脉冲在空气中迅速传播,当遇到物体时会发生一部分反射。
3. 接收器接收到反射的超声波信号。
4. 通过计算脉冲的往返时间,即从发射到接收的时间间隔,可以得到声波在空气中行进的时间。
5. 根据声波在空气中的传播速度(通常为343米/秒),可以
利用时间和速度的关系来计算出物体与测距仪之间的距离。
超声波测距仪的精确度取决于发射器和接收器的性能,以及环境的影响。
例如,超声波在不同介质中的传播速度会有所不同,因此在不同介质中测量距离时需要进行相应的校正。
总的来说,超声波测距仪利用声波的传播速度和往返时间的关系来测量距离。
它被广泛应用于工业领域中的测量和控制系统中,常见的应用包括距离测量、物体检测和障碍物避免等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、按如下图示连接好电缆线:
1:VCC 电源+5V输入
2:ECHO 计数(计时)管脚
3:TRIG 触发输入
4:DQ 温度传感器IO口(暂不提供本功能,不连接)
5:GND 电源地
6:PCW RS232通讯接口TXD,RS232电平(暂不提供本功能,不连接)7:PCR RS232通讯接口RXD,RS232电平(暂不提供本功能,不连接)二、程序处理
单片机程序处理时,只要将TRIG脚给一段时间的高电平,模块自动就会发送40K的方波,发送完毕ECHO脚为高电平,模块自动检测是否有信号返回,如有信号返回,ECHO脚变为低电平,ECHO脚的高电平时间就是超声波走过的时间,测试简单方便。
身长转换公式:L=(331.5+0.6*T)*b*js+offset;
其中L为测量长度,T为当前温度,b为长度转换系数(不同单片机该系数不同,需要自行测试得出该值),js为ECHO脚的高电平时计
数值(可参考以下子程序),offset为偏移值(对测量精度要求不高时,此项可省略)
各变量定义为:unsigned long L ; unsigned char T; float b;unsigned int js; float offset;
对测量精度要求很高时,可对超声波测量距离进行校长标定处理,即在两个不同的点分别进行校正,校正时L、T、js都是已知量,可以求出长度转换系数b和偏移量offset,然后再根据每次测量的js值,可以求出实际的长度。
三、调用子程序
注意:以下程序已经是成功运用到产品中的子程序,请放心调用,不要随意外传
已成功的超声波测距程序~~室温25摄氏度。
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
void udelay(int a);
sbit echo=P1^0;
sbit trig=P1^2;
uint i;
unsigned long js=0;
float l;
uint ll;
uint height[5];
uint table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x80};
uint led[]={0x00,0x01,0x02,0x03,0x04};
void fdelay(int a);
void display();
void main()
{
echo=1;
while(1)
{
trig=1;
udelay(50);
trig=0;
while(echo==0) ;
while(echo==1) js++;
l=0.3035*js+9.5;
ll=(uint)(l*10);
display();
i=0;
while(i<5)
{
P2=led[i];
P0=table[height[i]];
fdelay(10);
i++;
}
js=0;
}
}
void display()
{
height[0]=( ll/1000);
height[1]=(( ll/100)%10); height[2]=((ll/10)%10);
height[3]=10;
height[4]=(ll%10);
}
void fdelay(int a)
{
uint ii=0;
uint jj=0;
for(jj=0;jj<a;jj++)
for(ii=0;ii<=120;ii++); }
void udelay(int a)
{
uint ii=0;
for(ii=0;ii<=a;ii++); }。